Tentang proyek ini
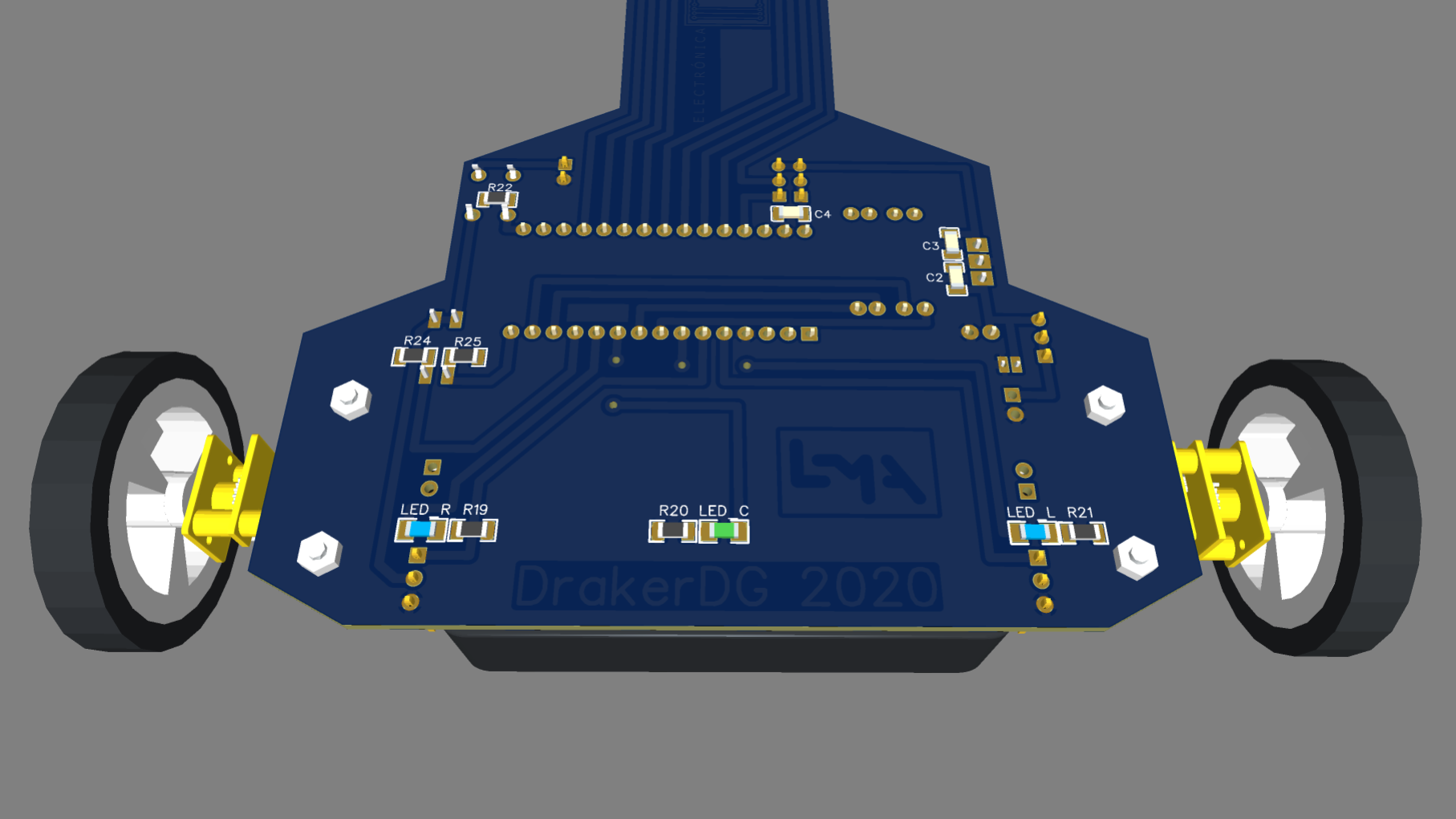
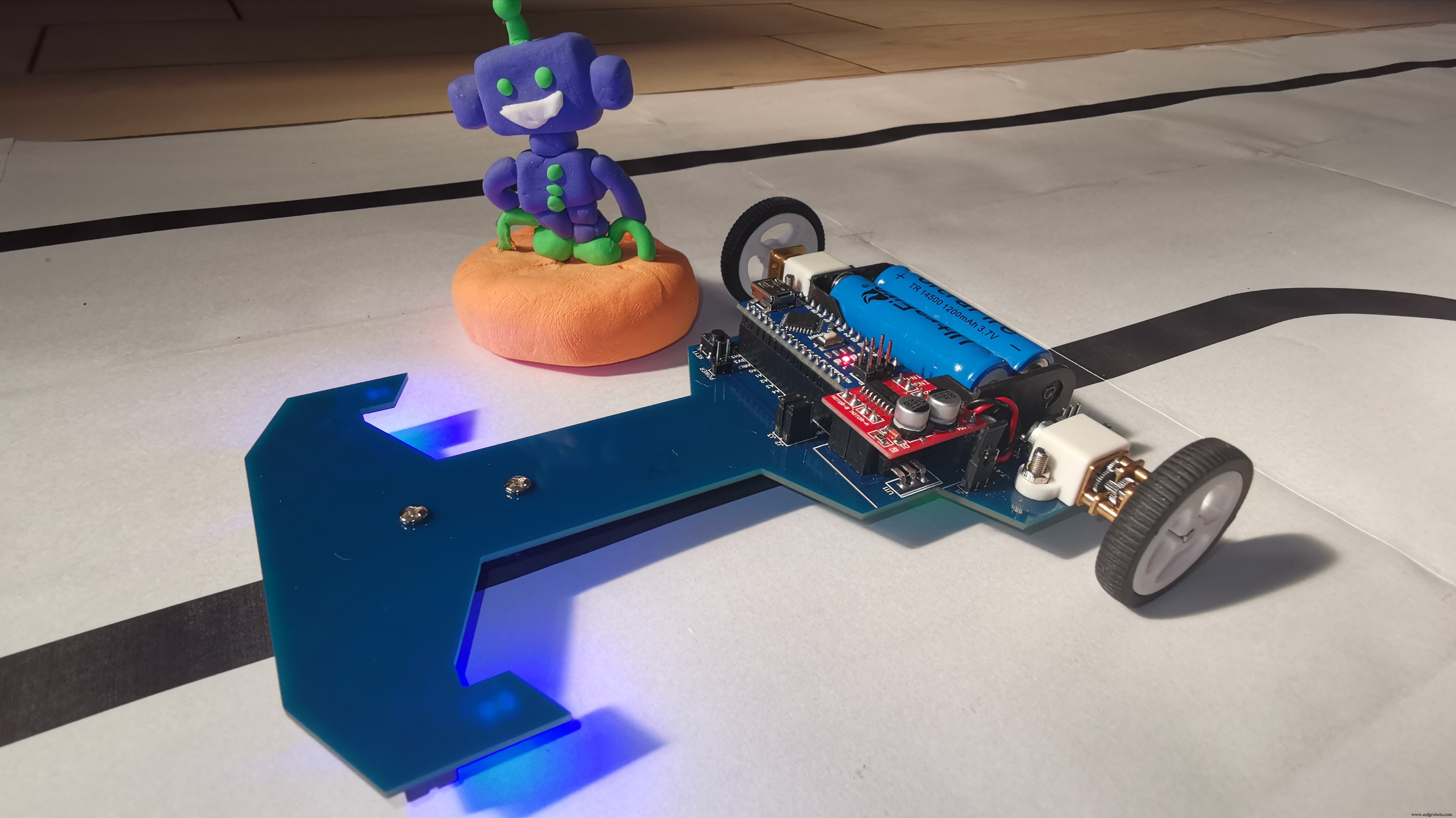
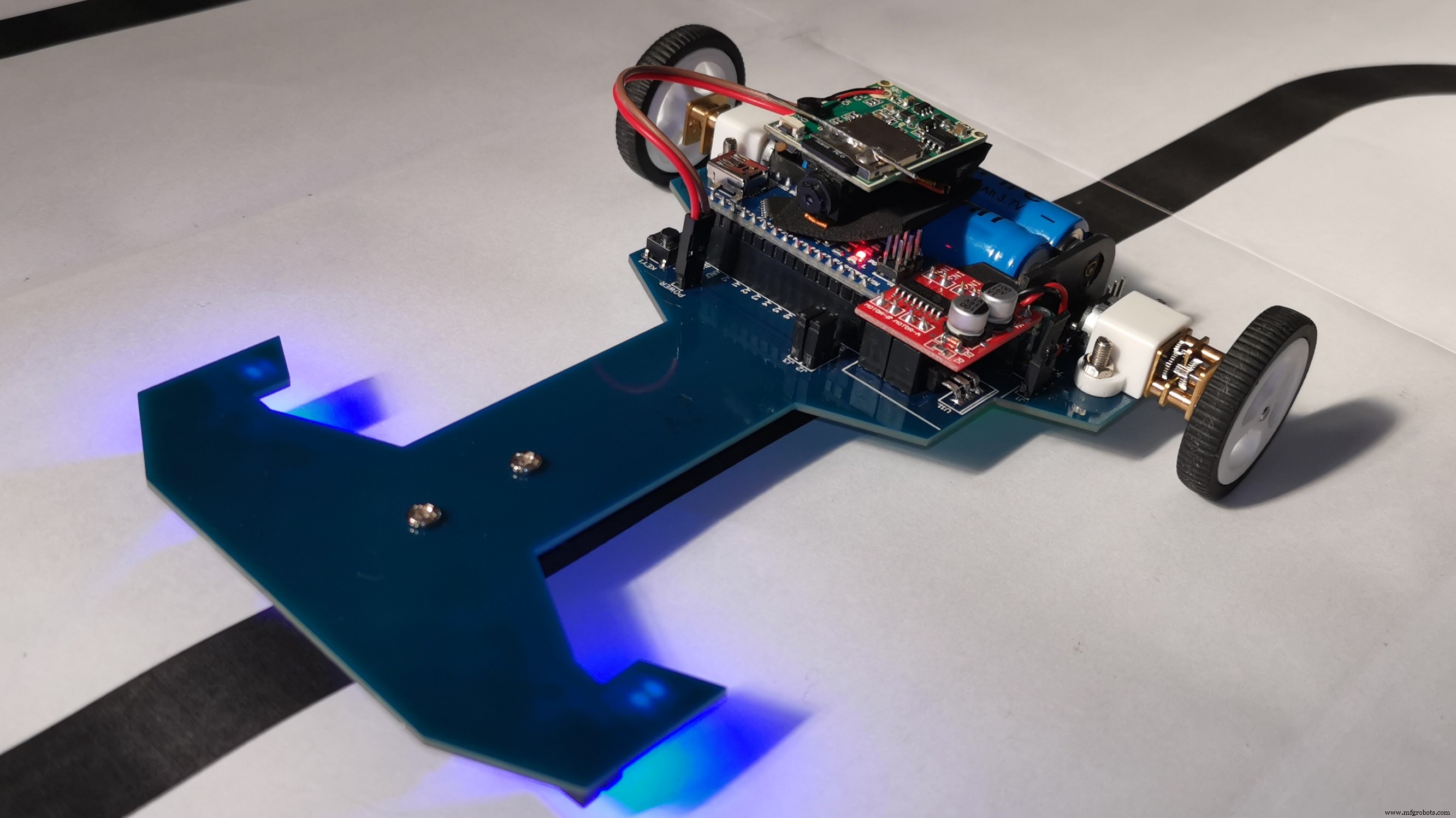
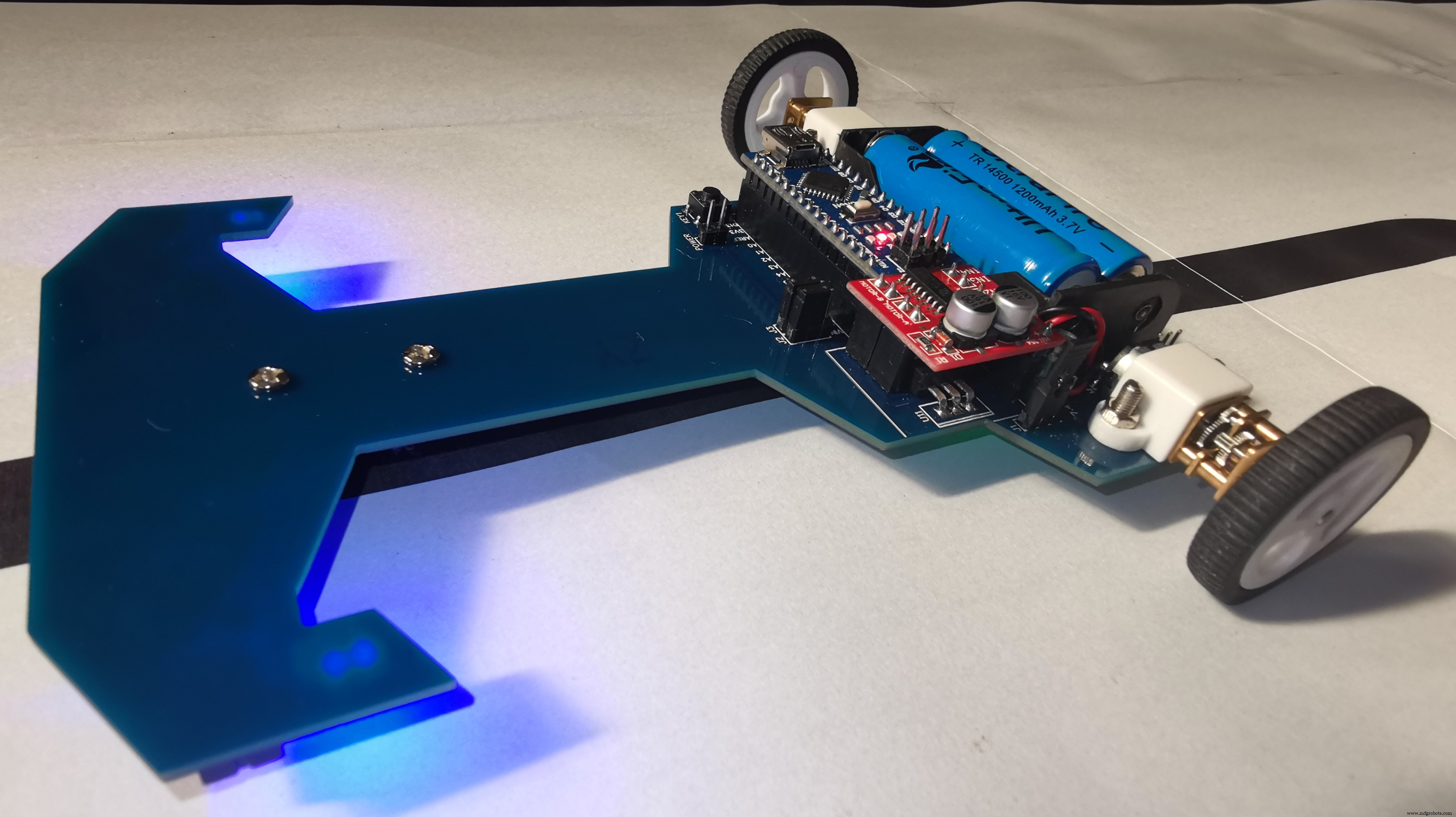
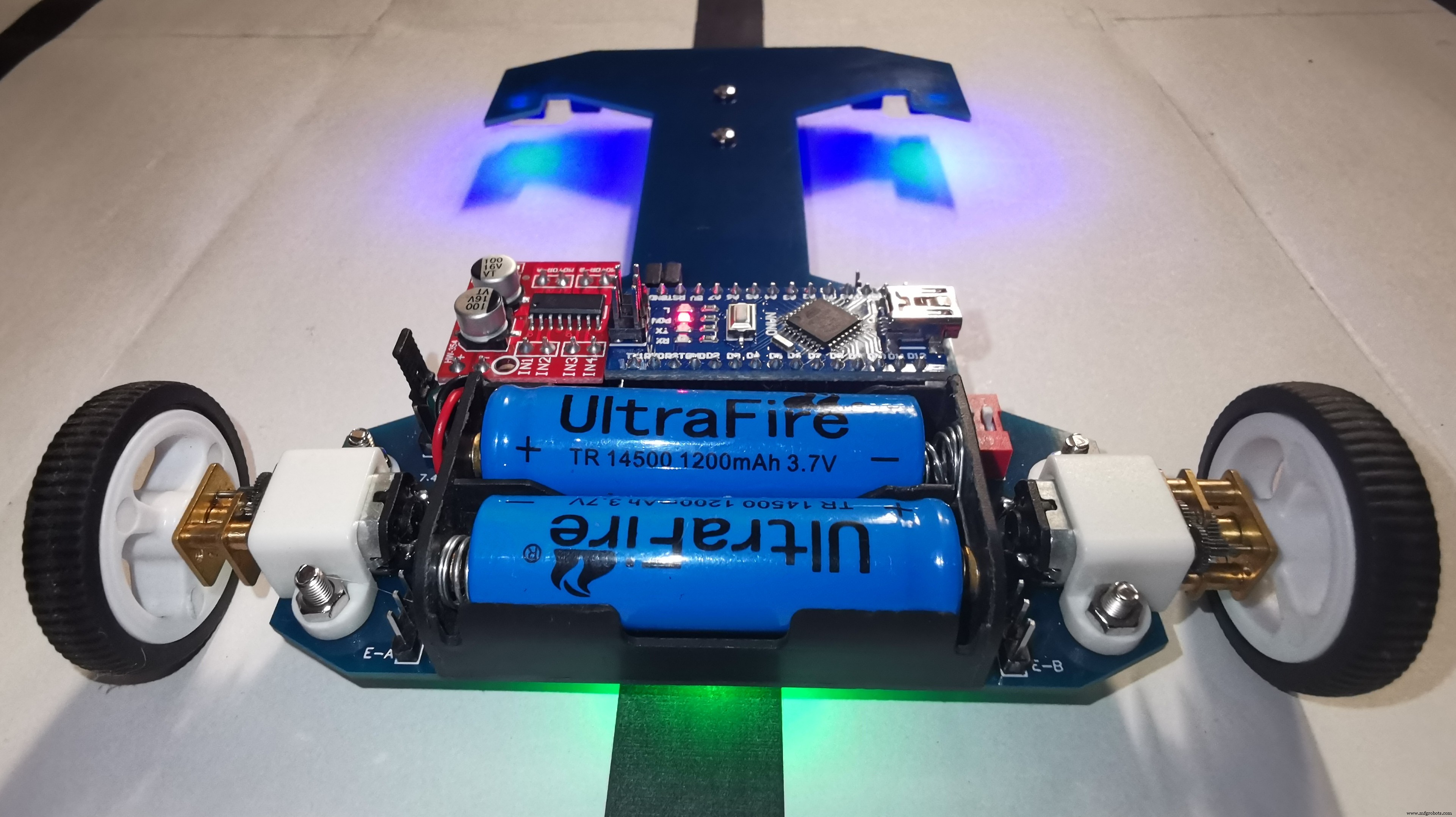
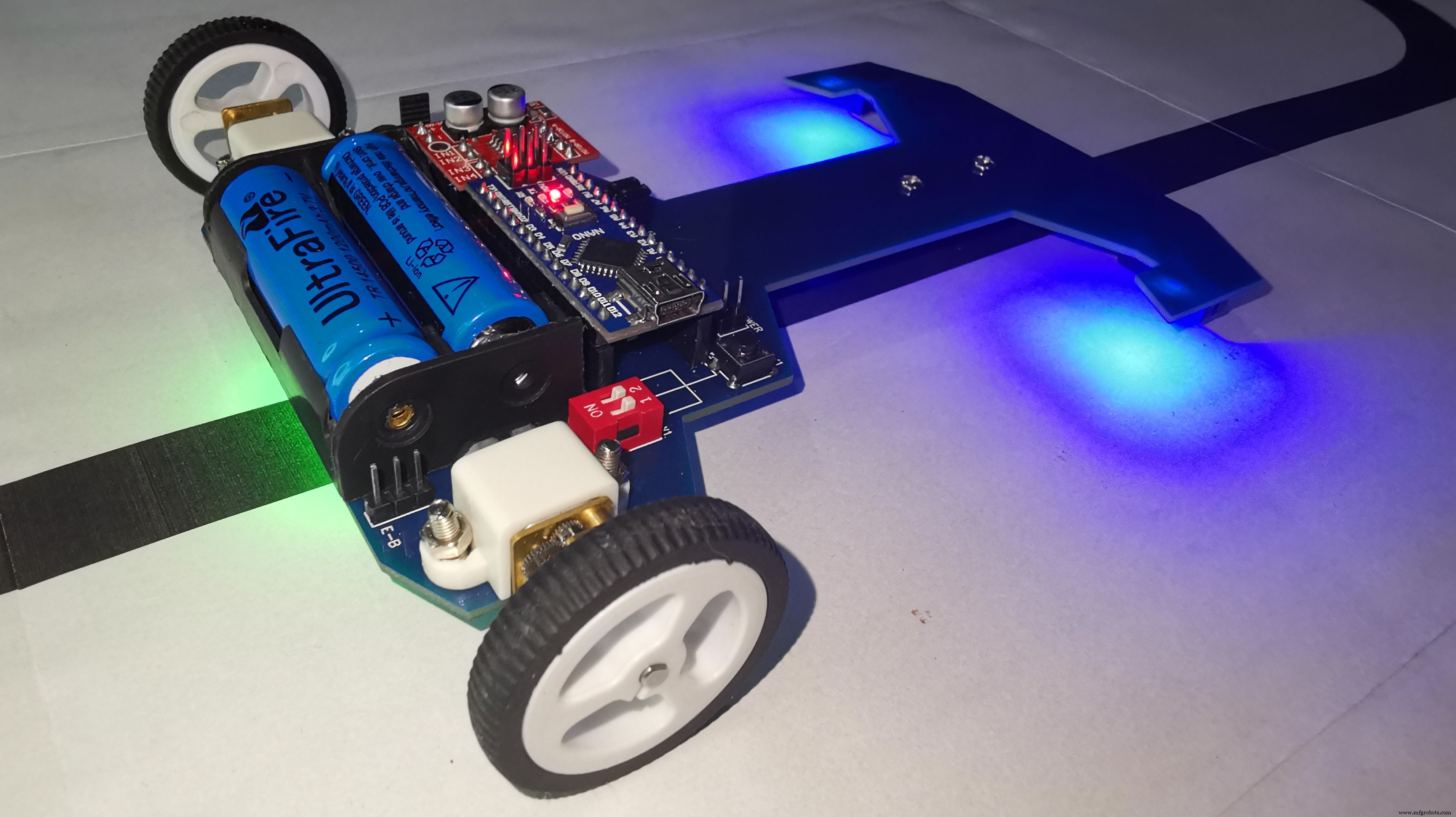
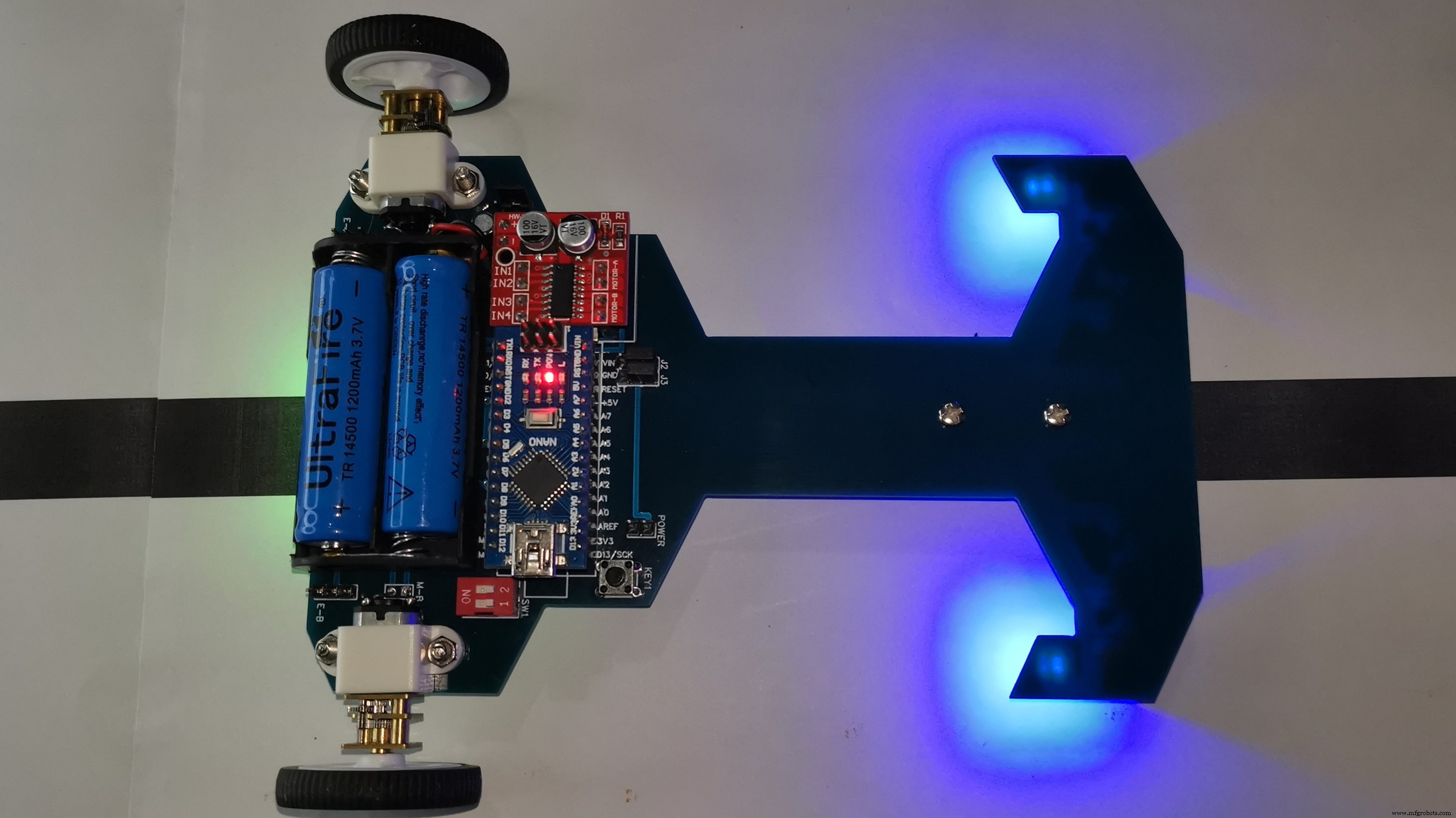
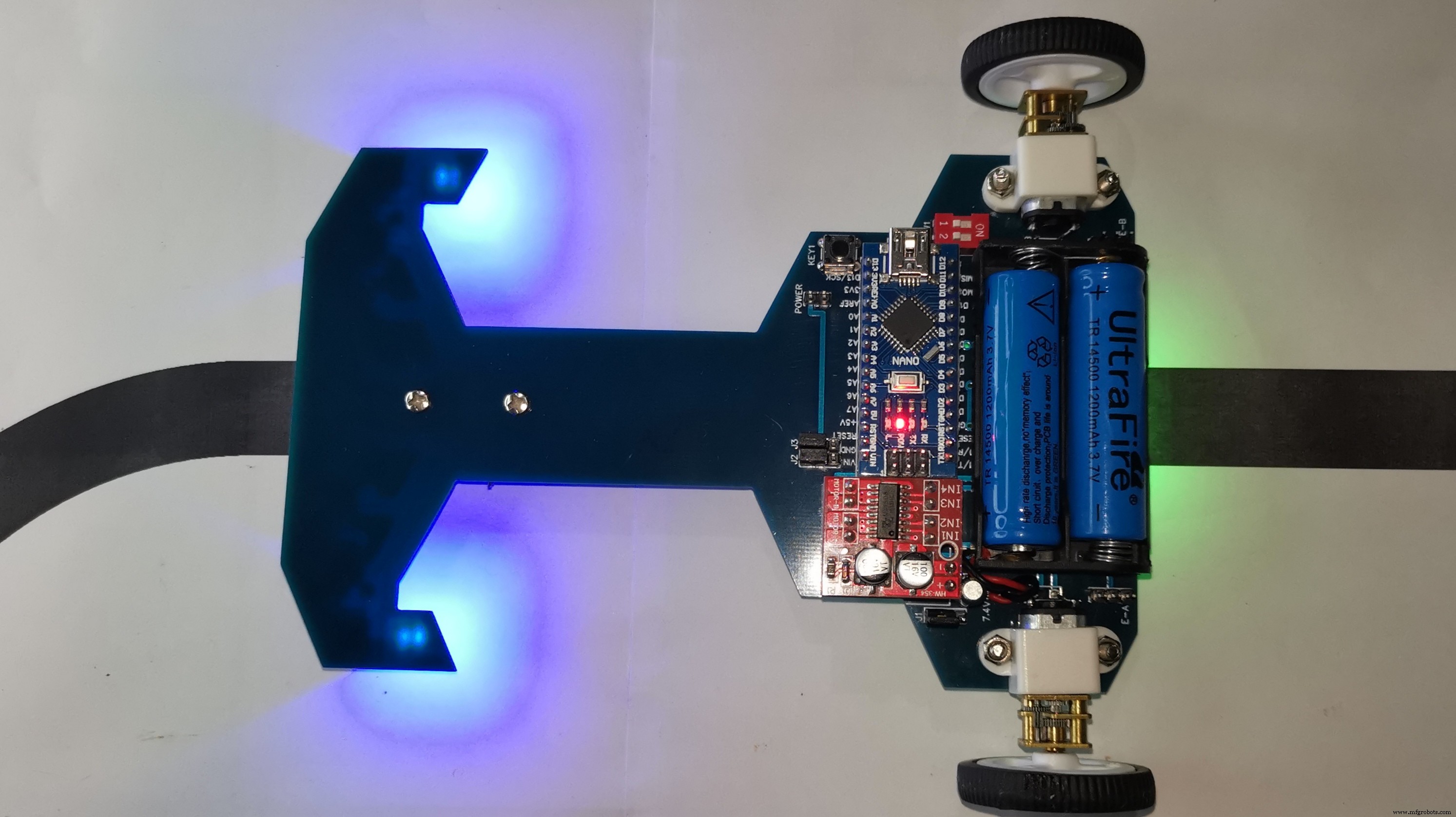
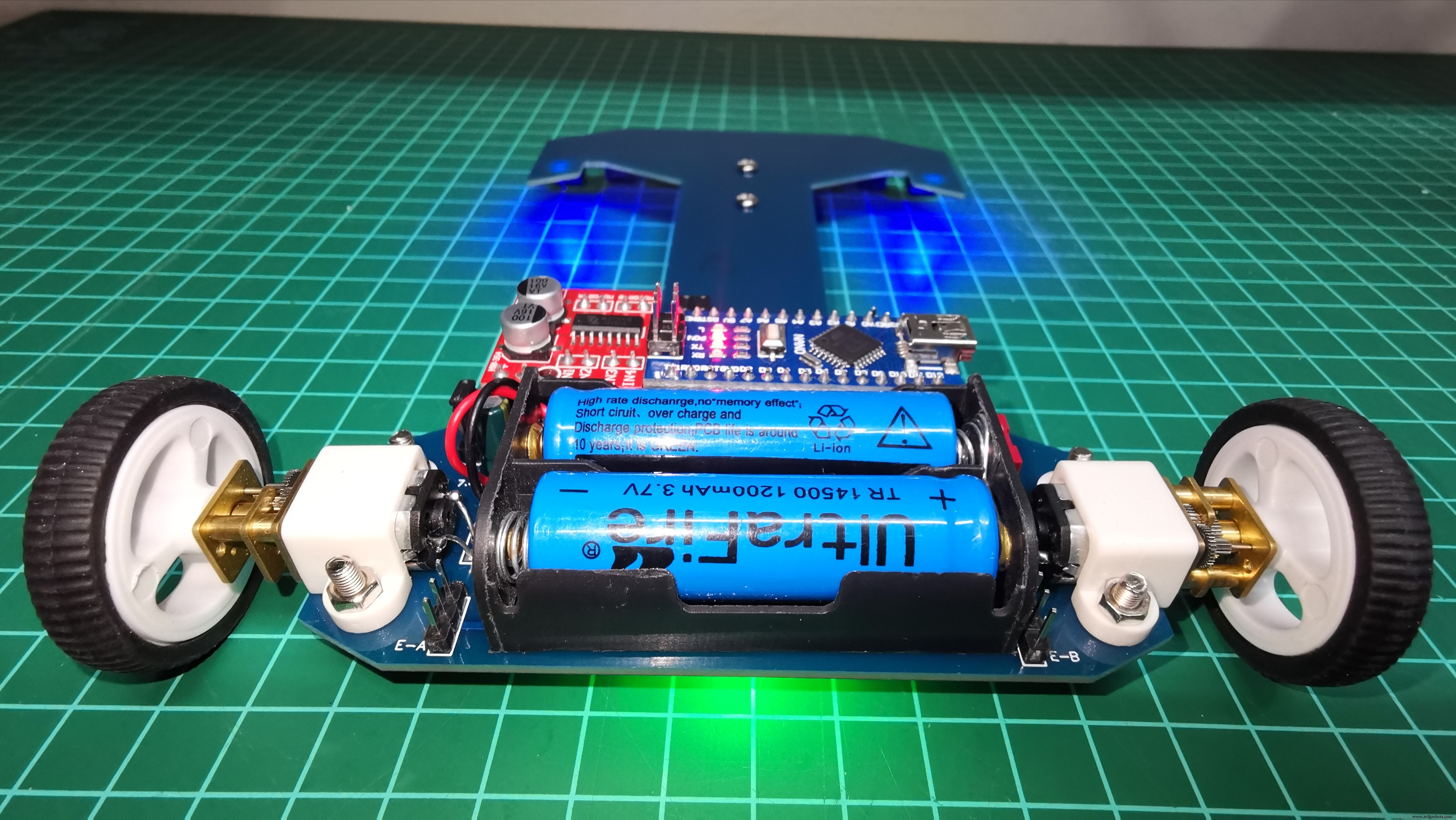
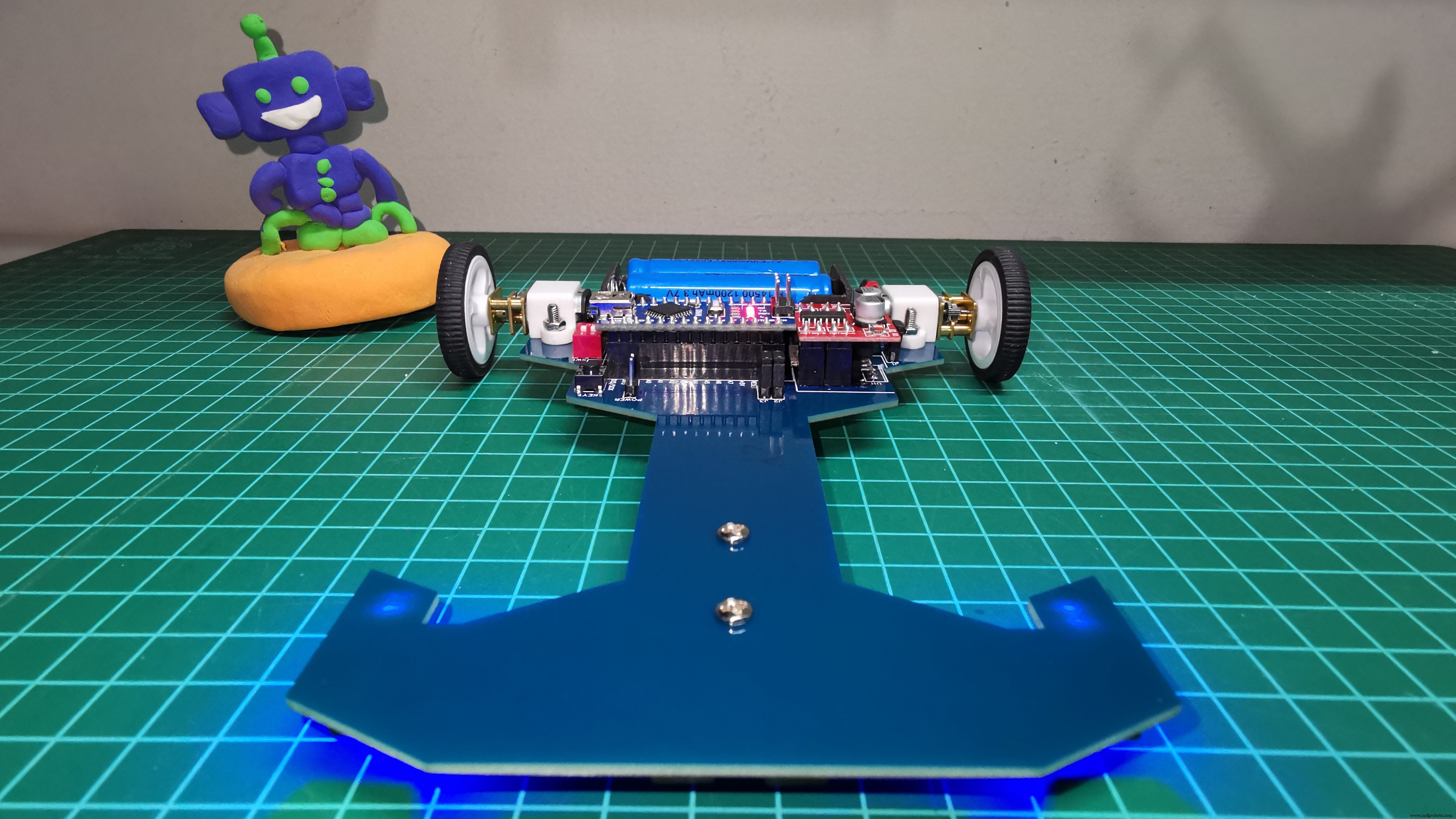
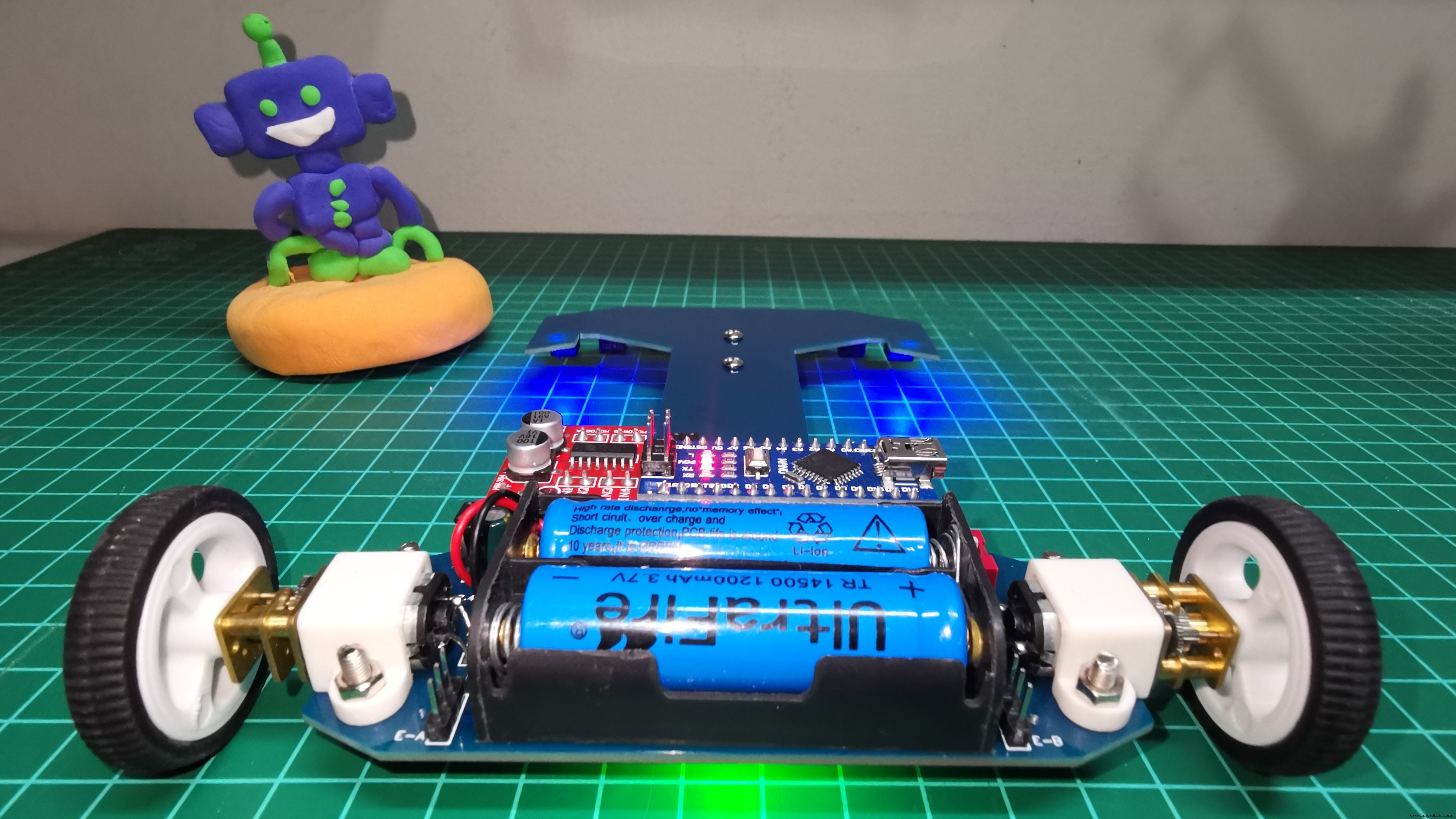
Ini adalah Robot Pengikut Baris kedua saya (Versi 4). Berbeda dengan sebelumnya, saya telah membuat desain sirkuit cetak menggunakan EasyEDA. Sirkuit tercetak ini bertindak sebagai sasis robot. Pembuatan PCB telah dilakukan oleh JLCPCB dan saya harus mengatakan bahwa mereka melebihi harapan saya dengan kualitas yang mengesankan dan pengiriman dalam waktu singkat.
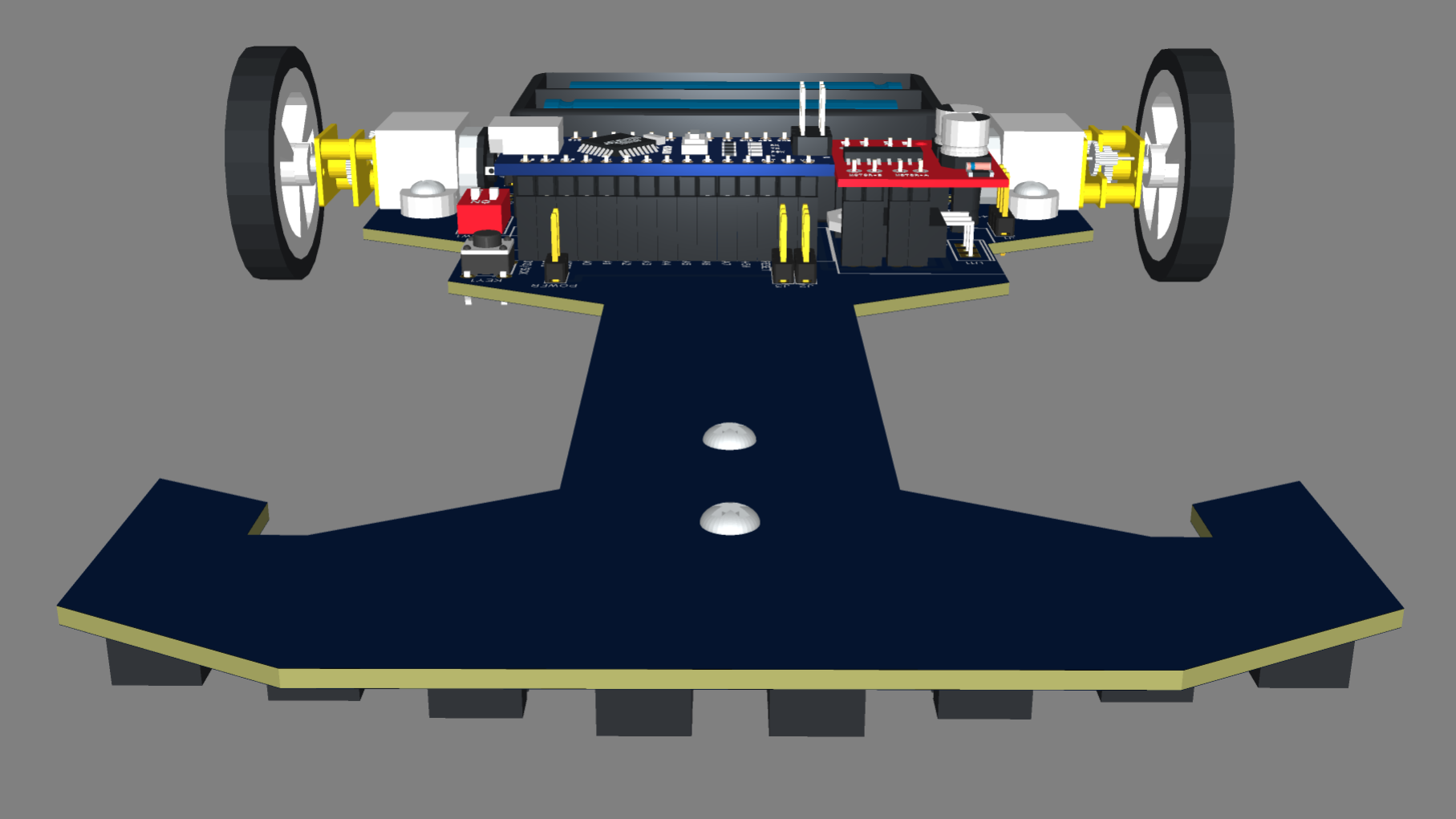
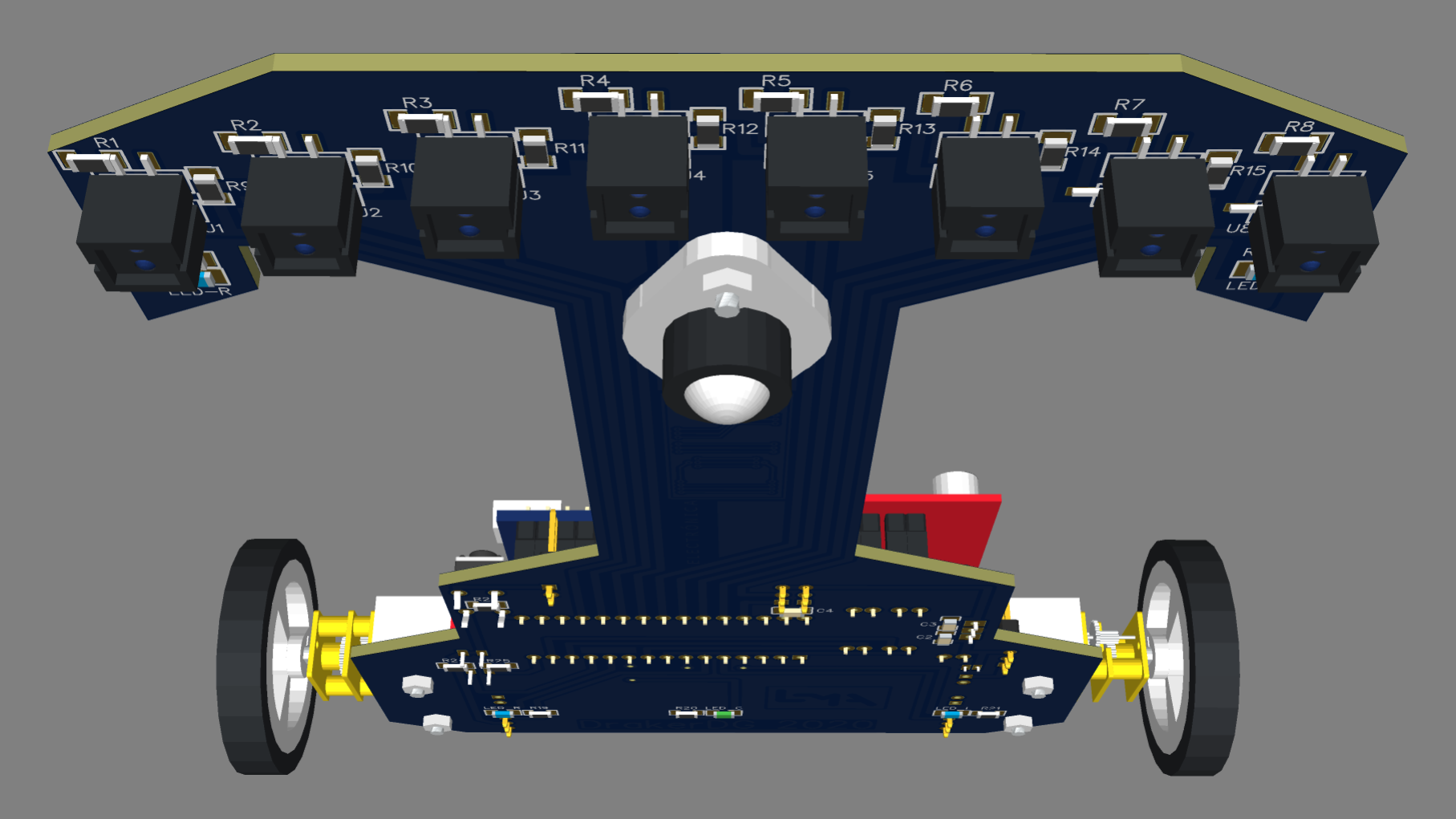
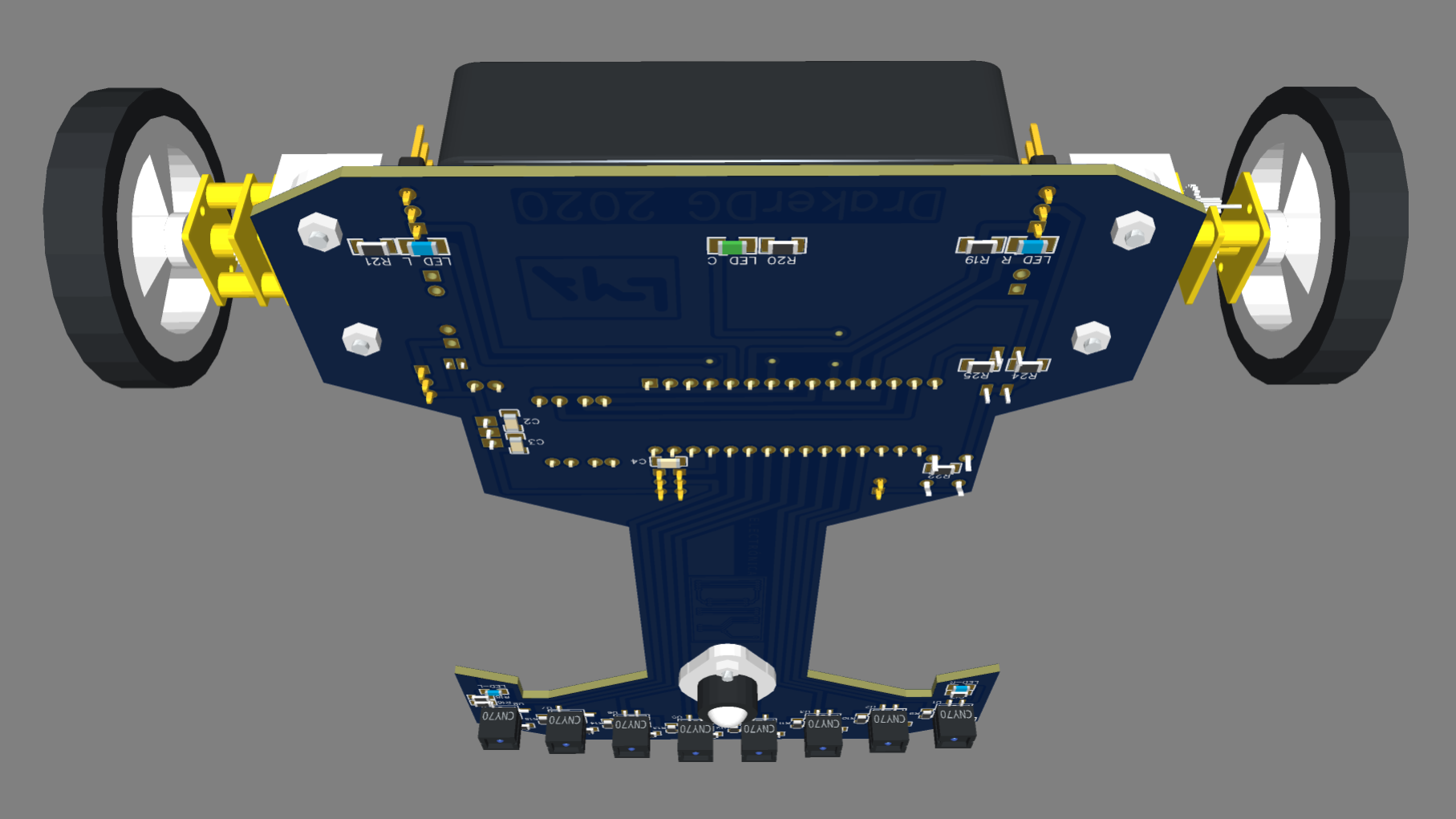
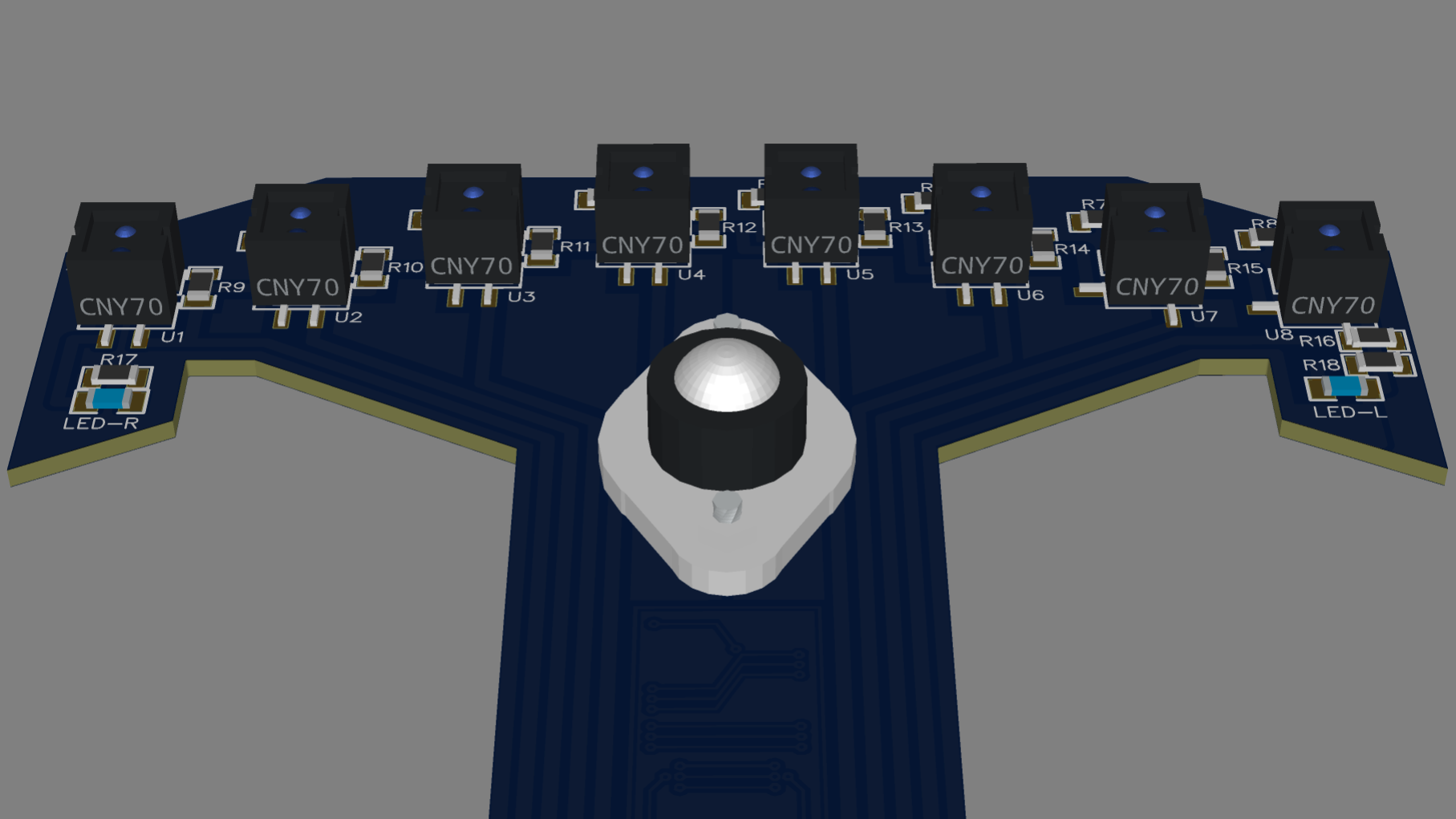
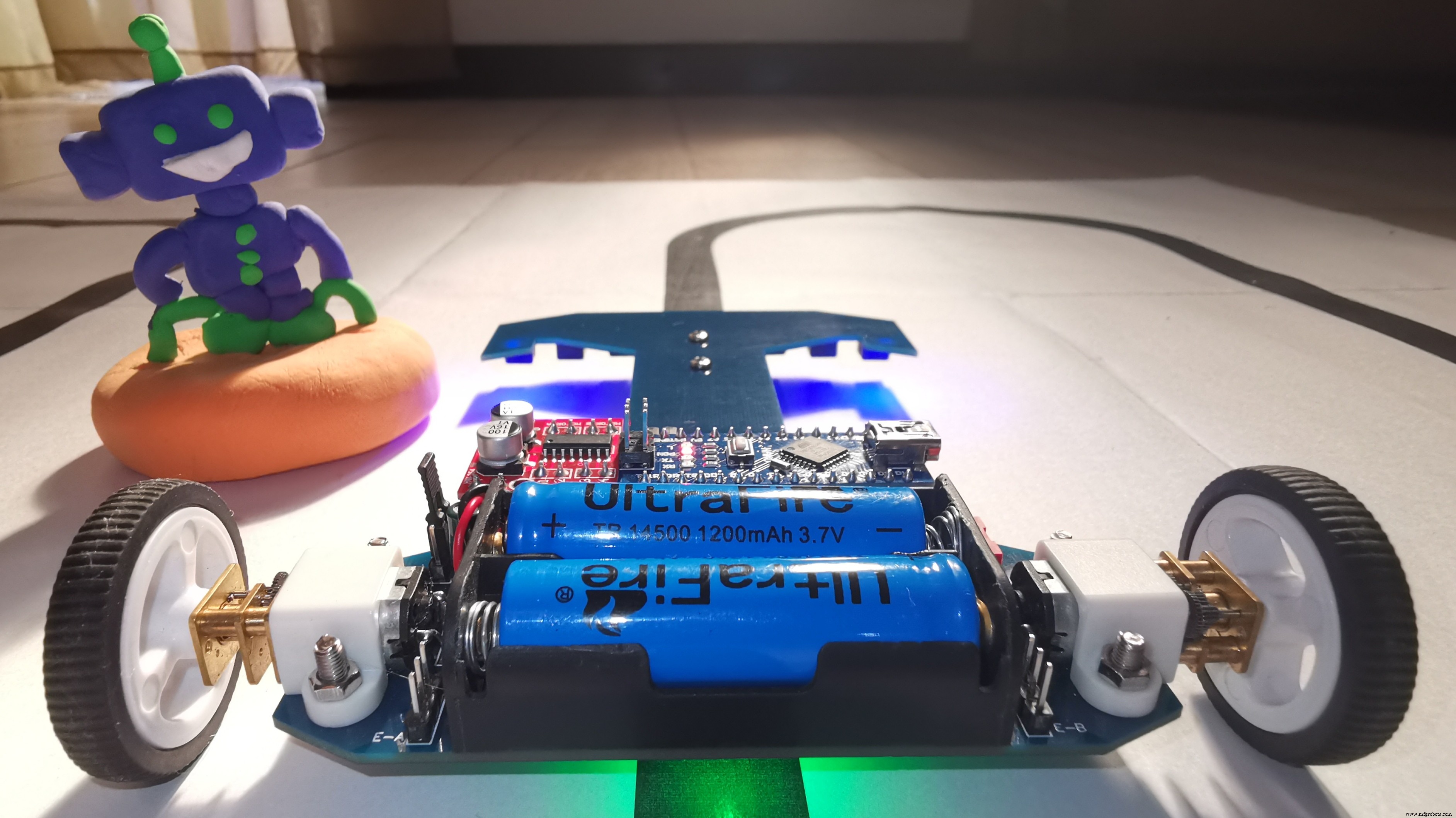
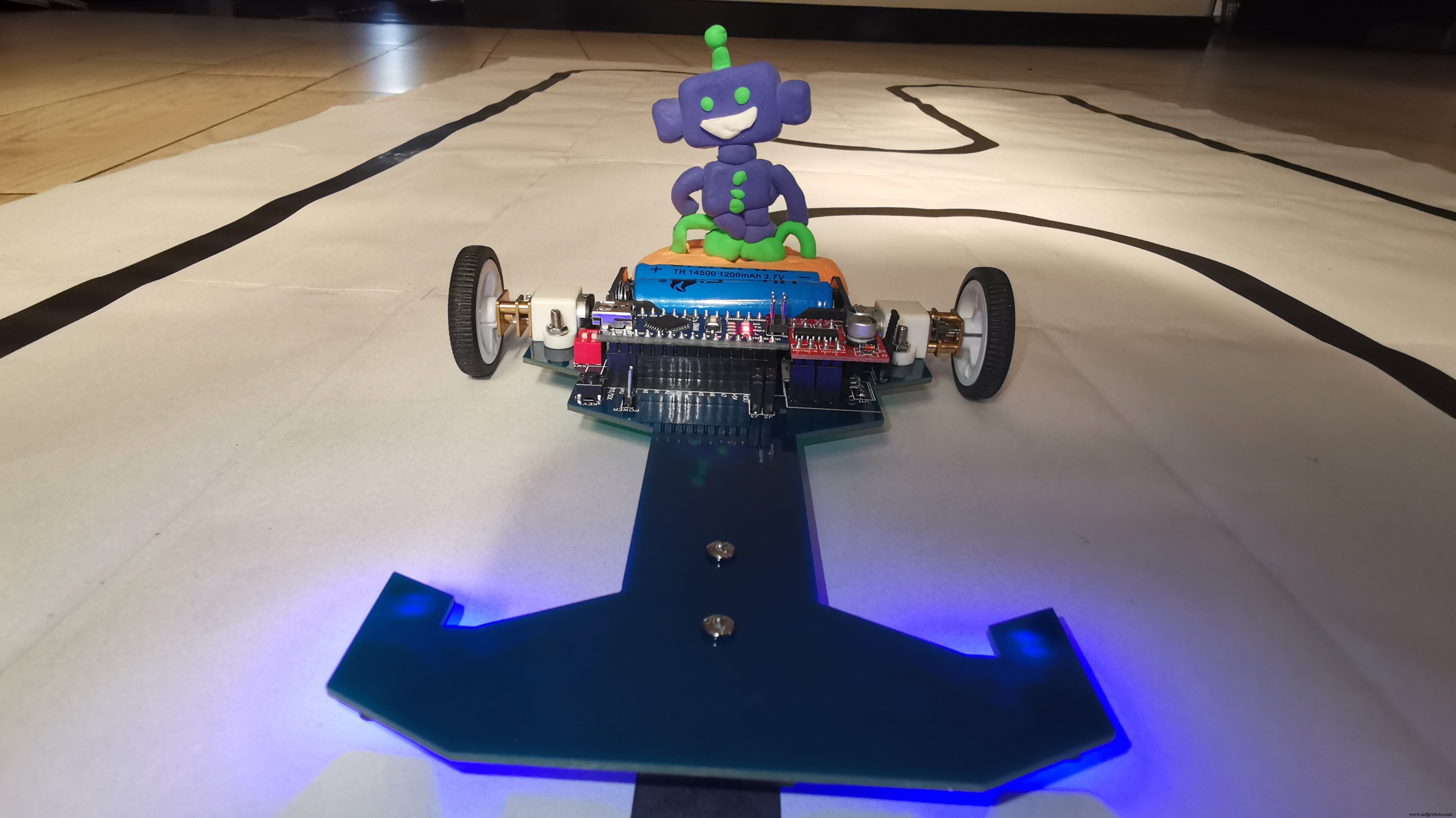
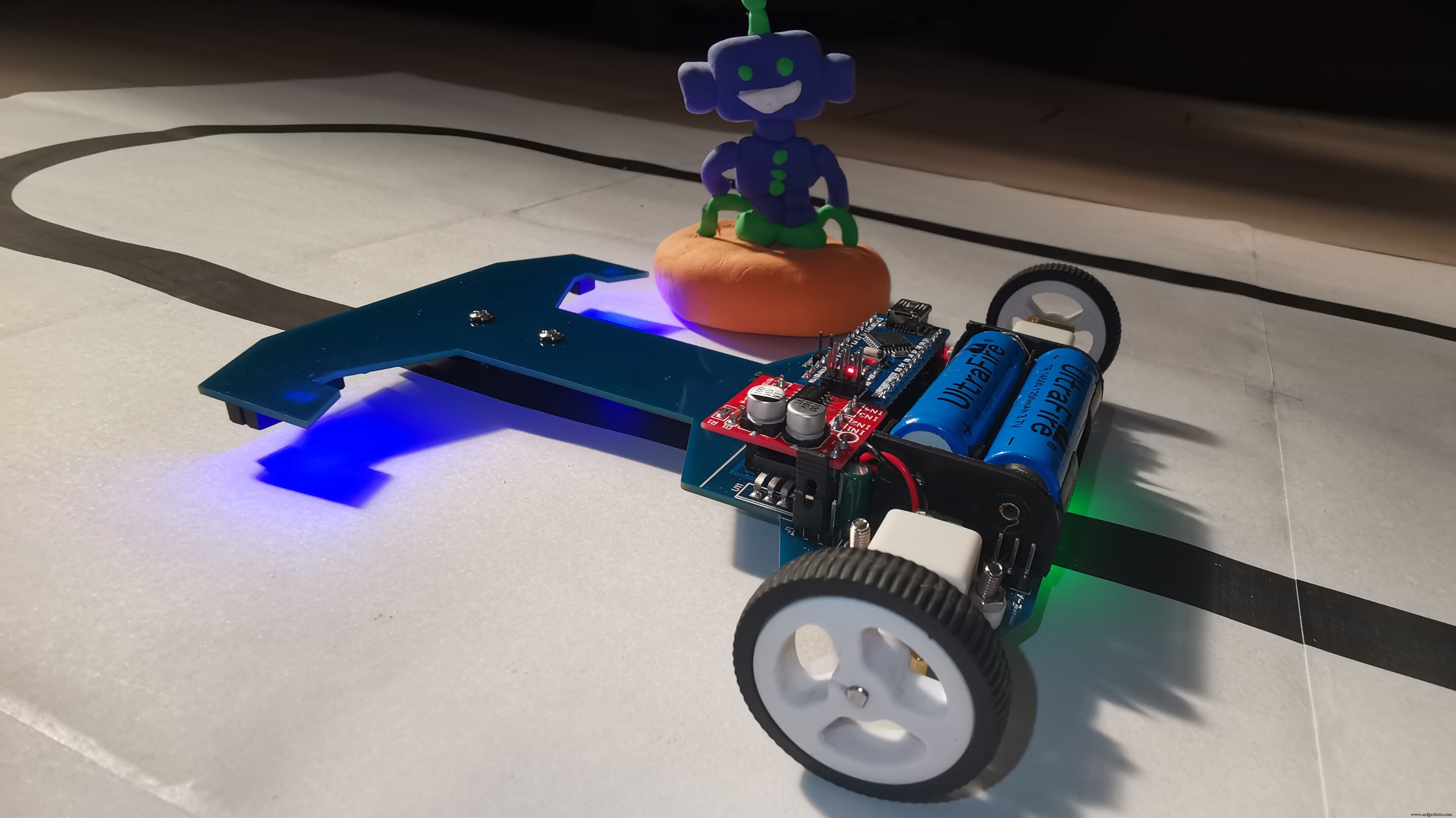
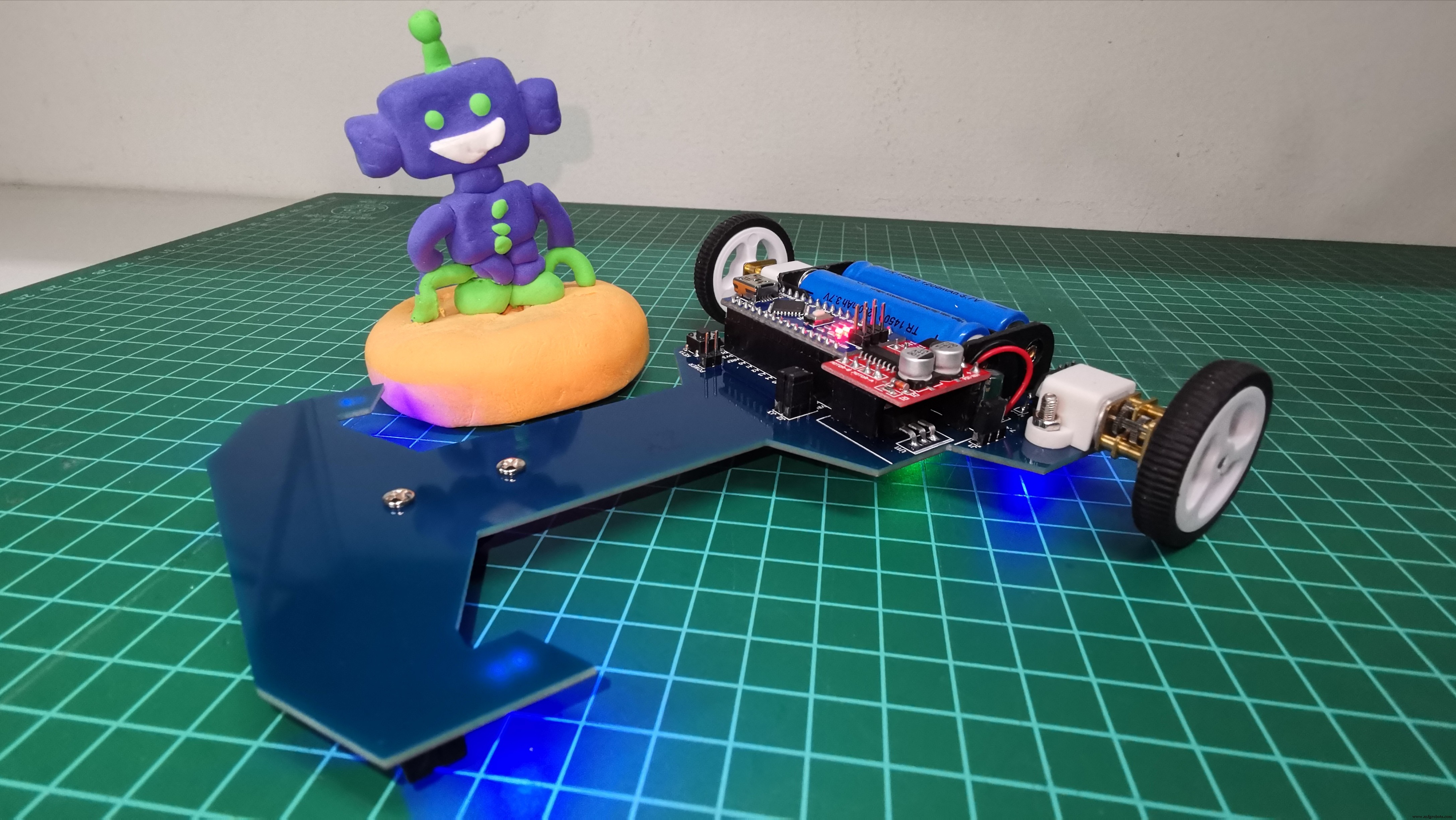
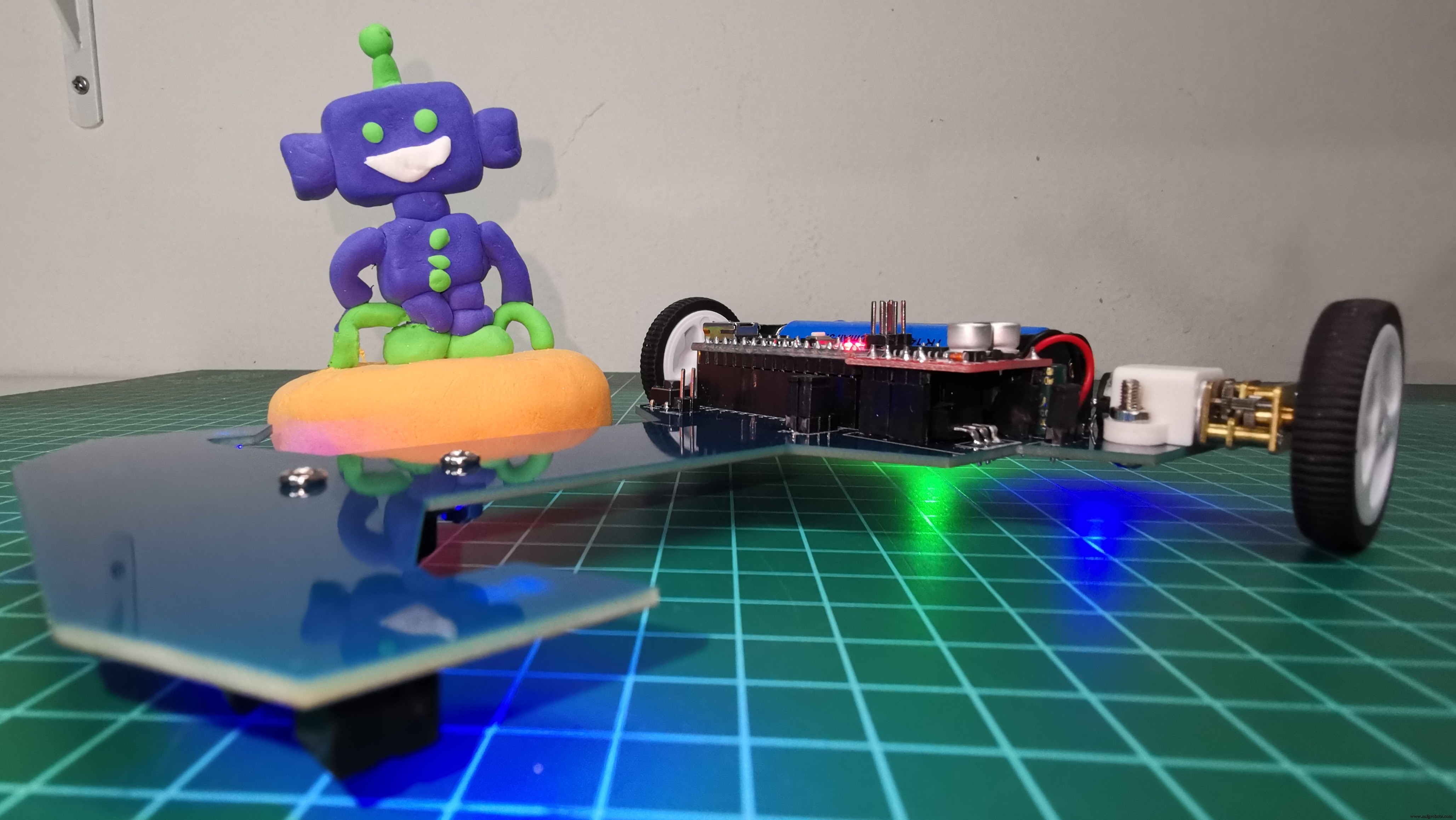
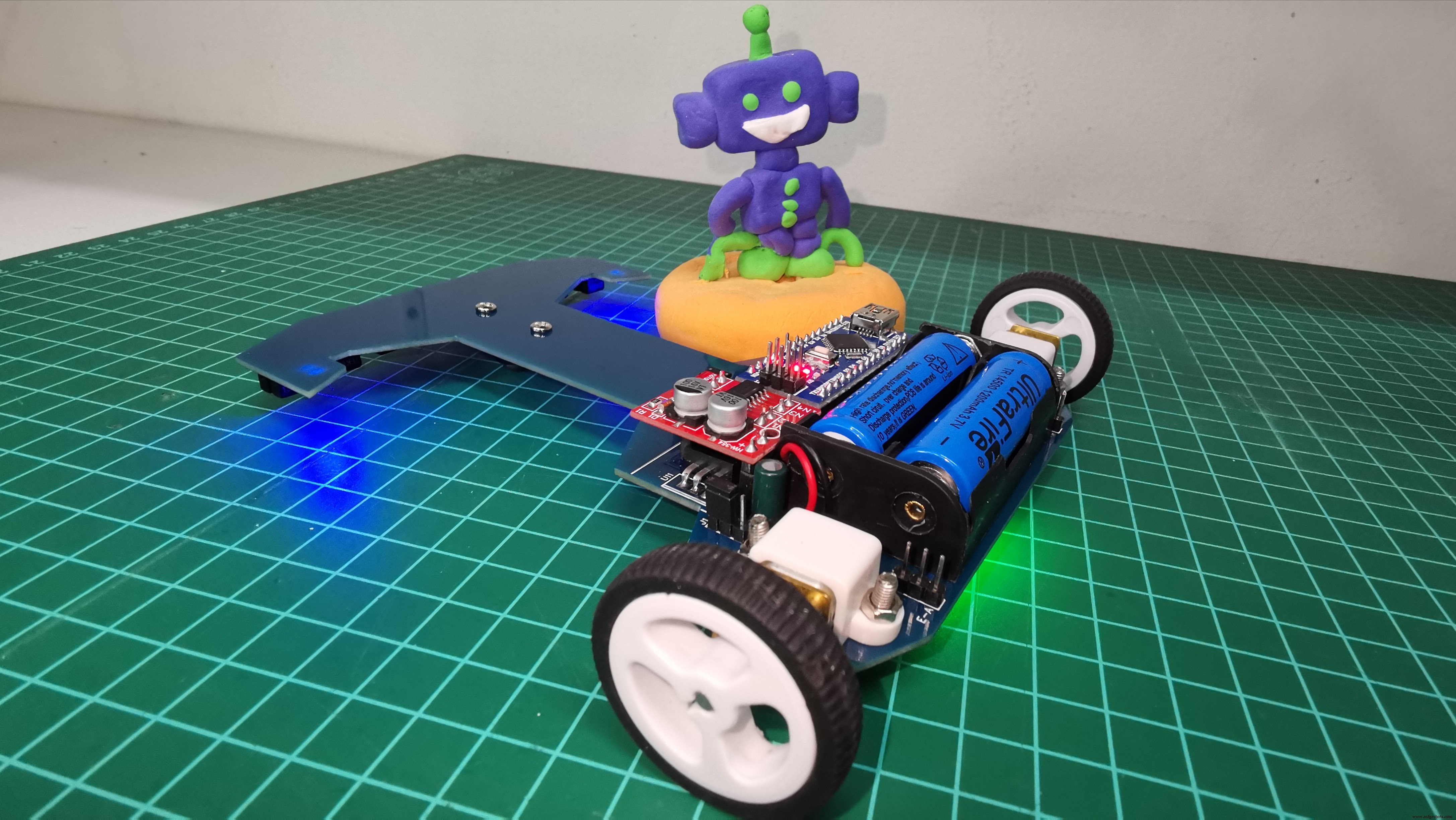
Video berikut menunjukkan hasil akhir dari prototipe di mana saya telah menyertakan model 3D yang dirancang di TinkerCAD.
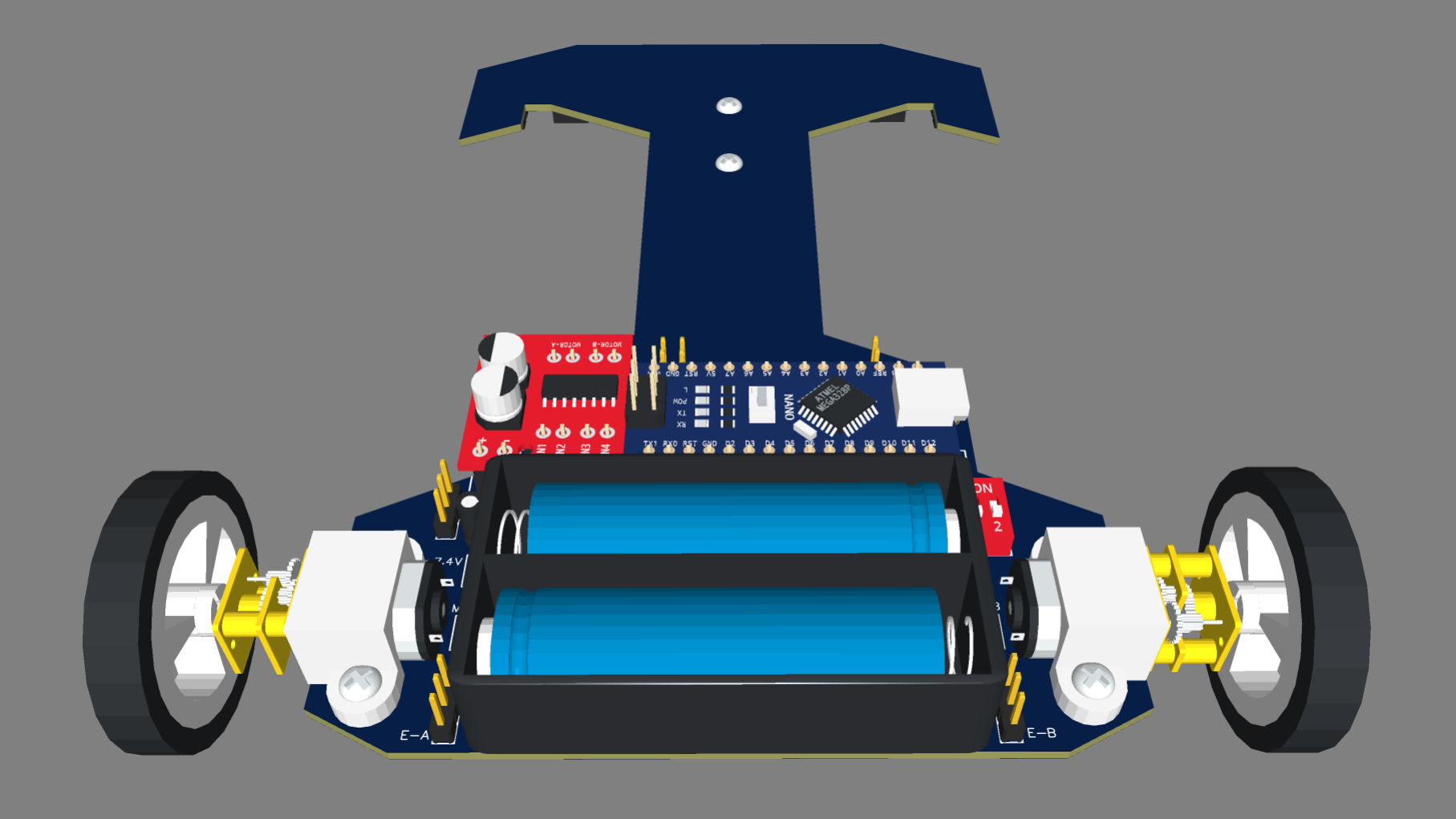
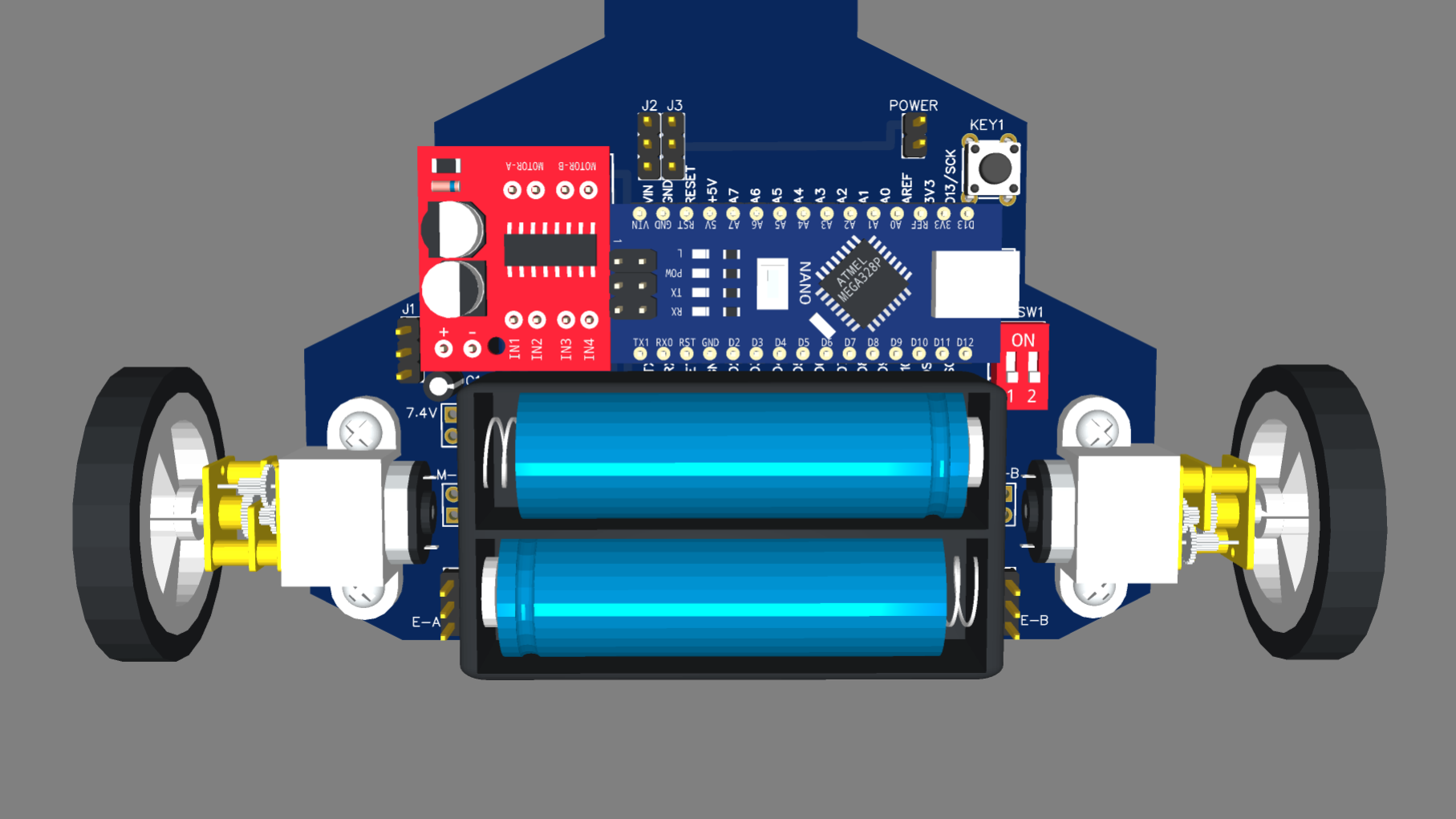
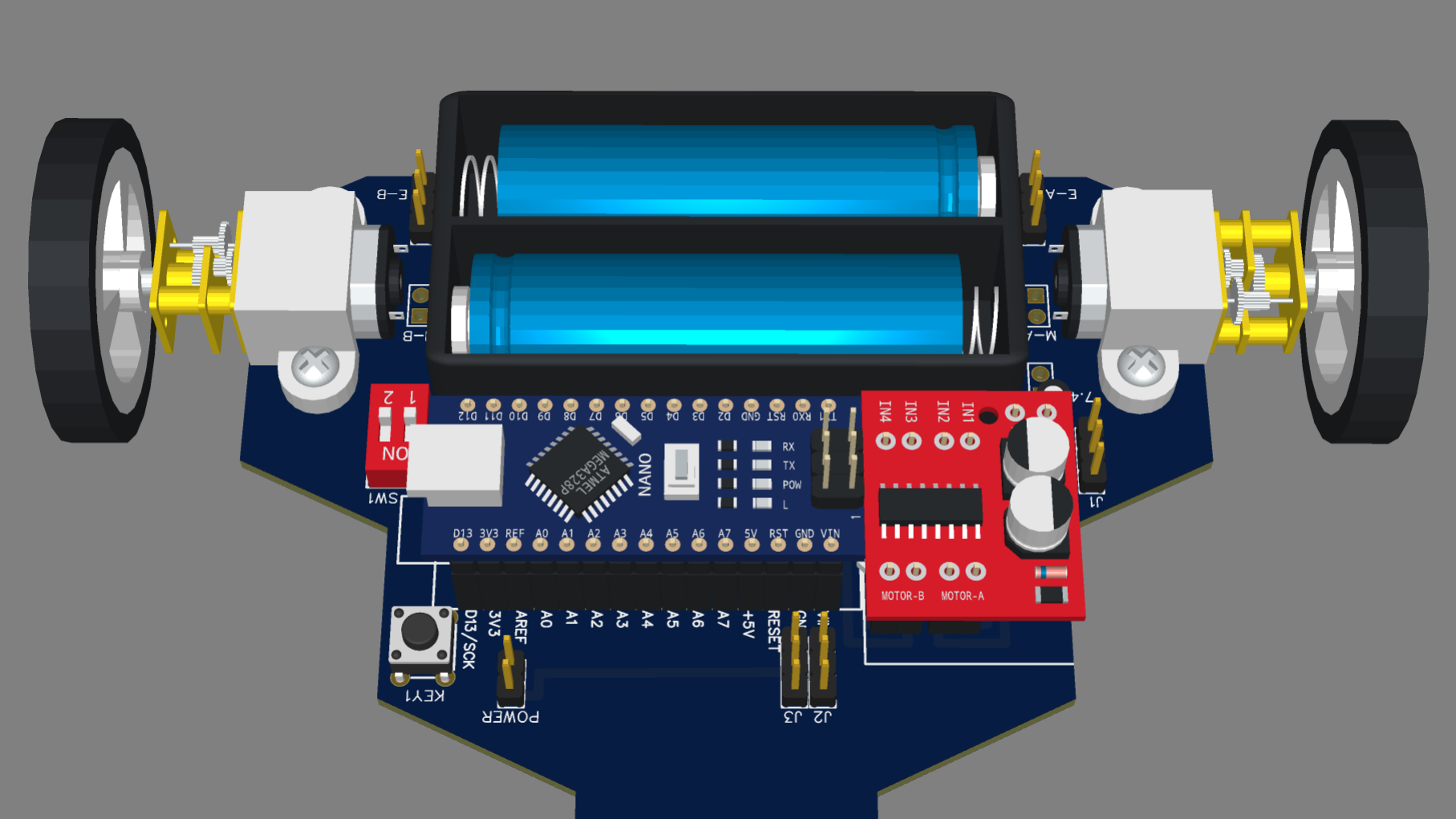
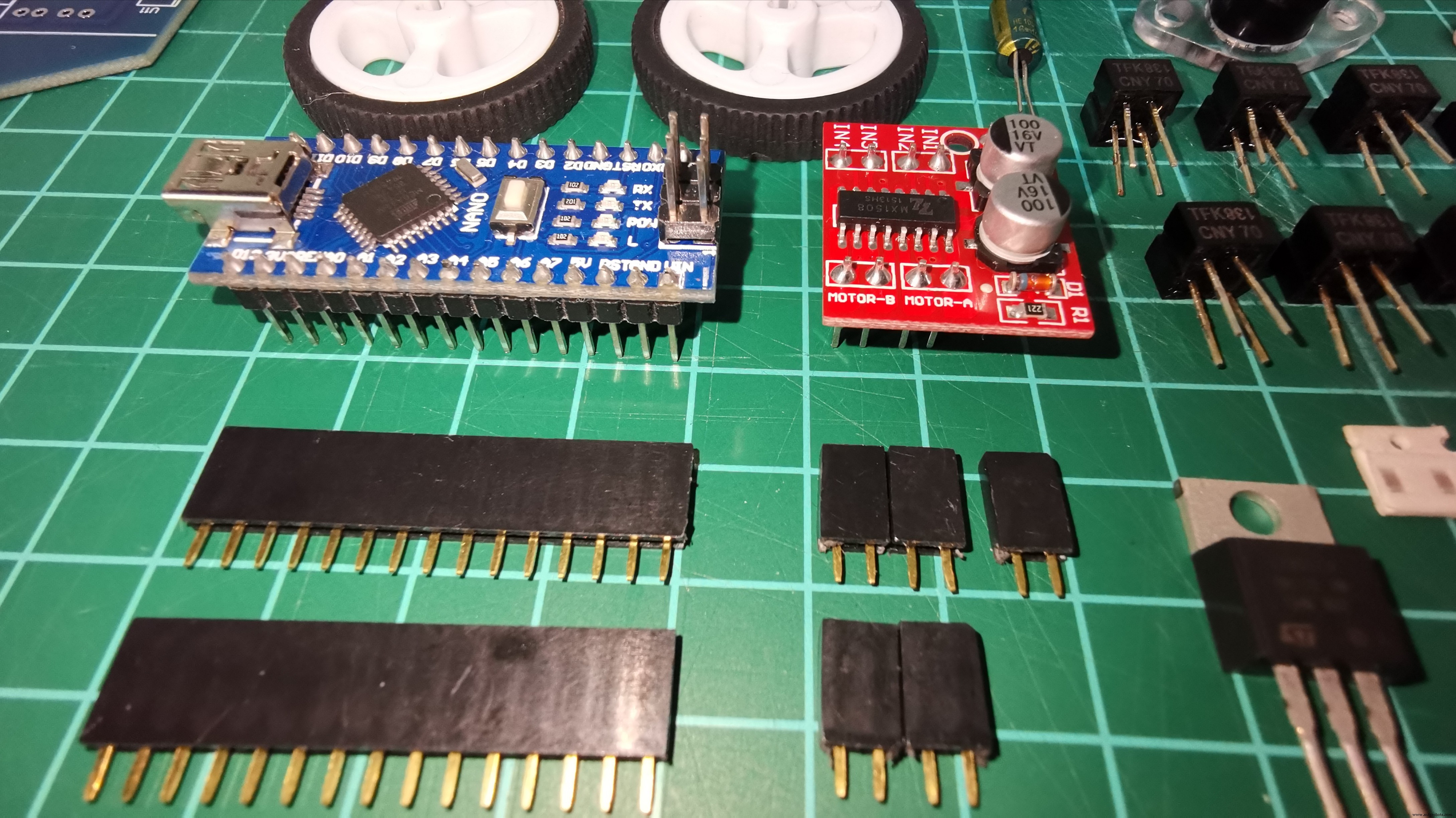
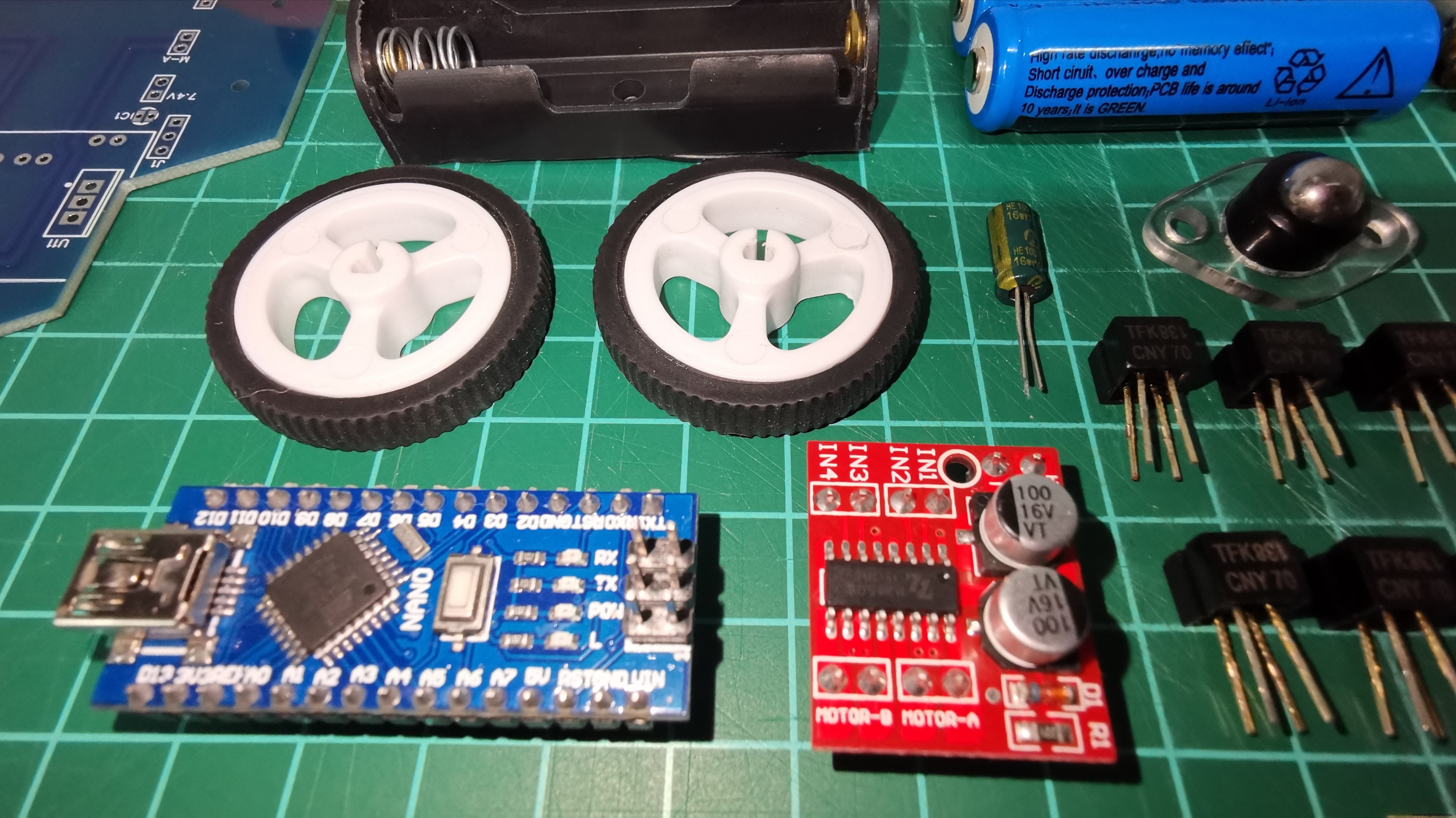
Dalam video berikut saya tunjukkan pengujian yang dilakukan dengan Driver Motor Mini (MX1508).
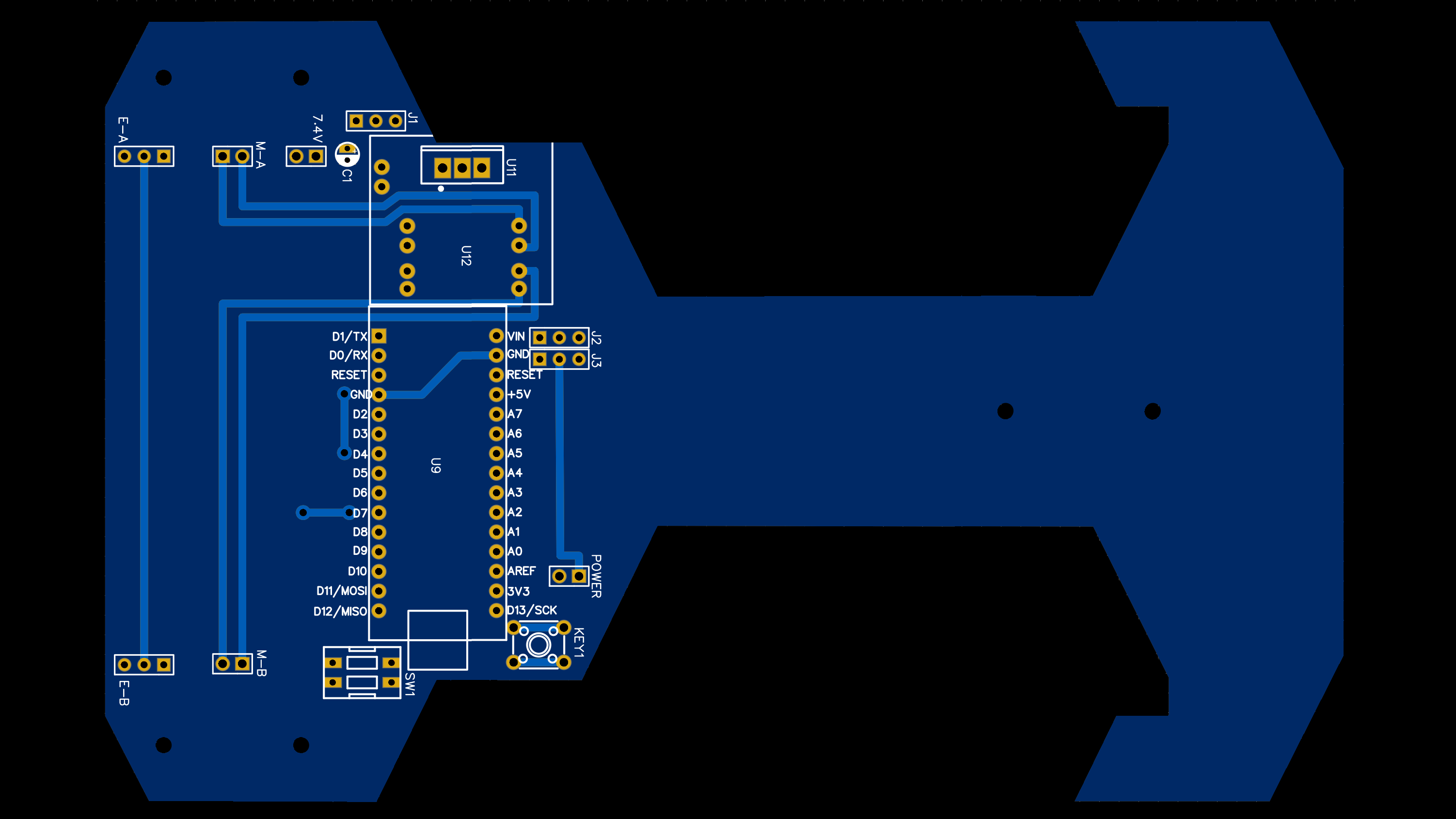
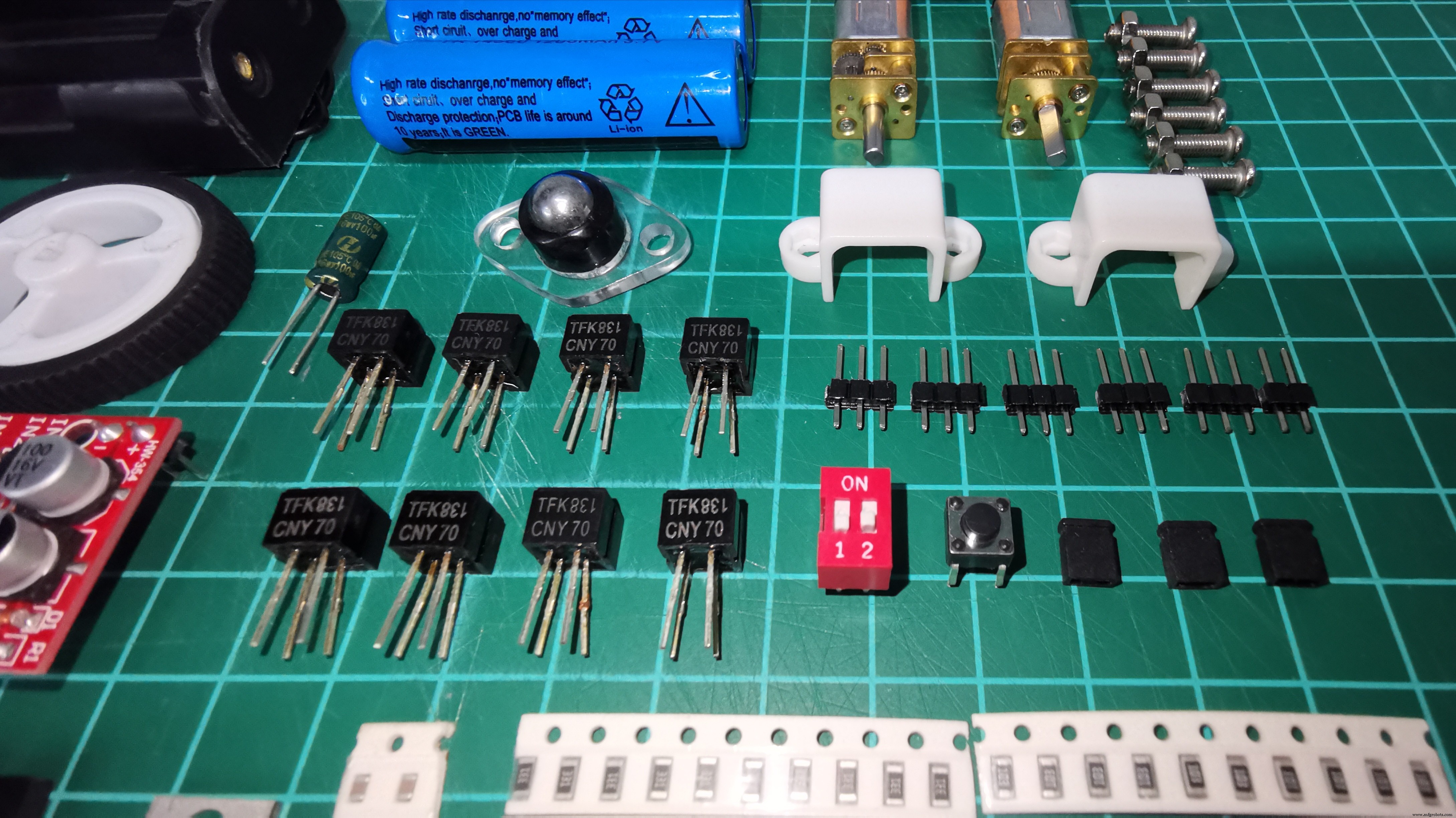
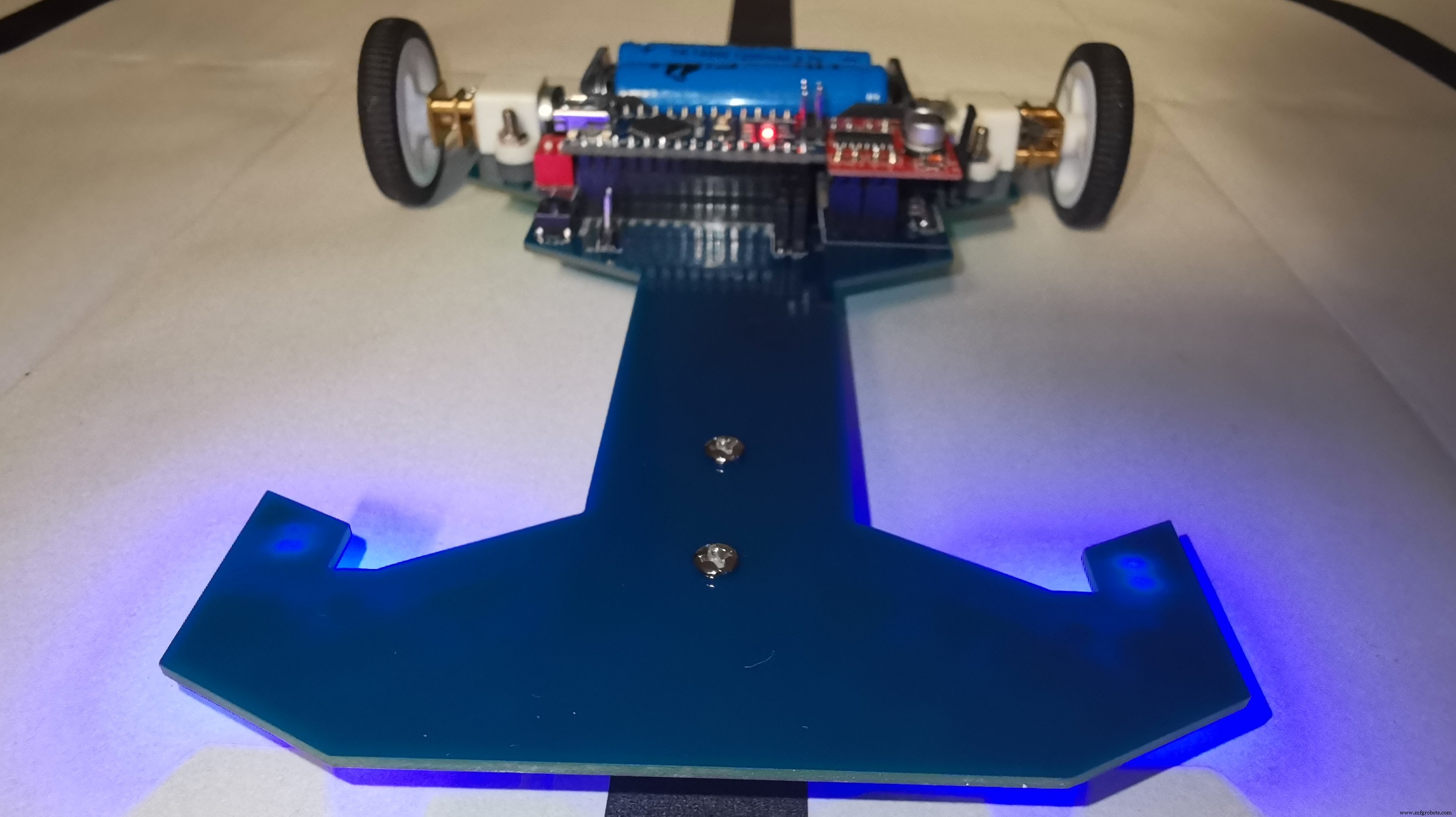
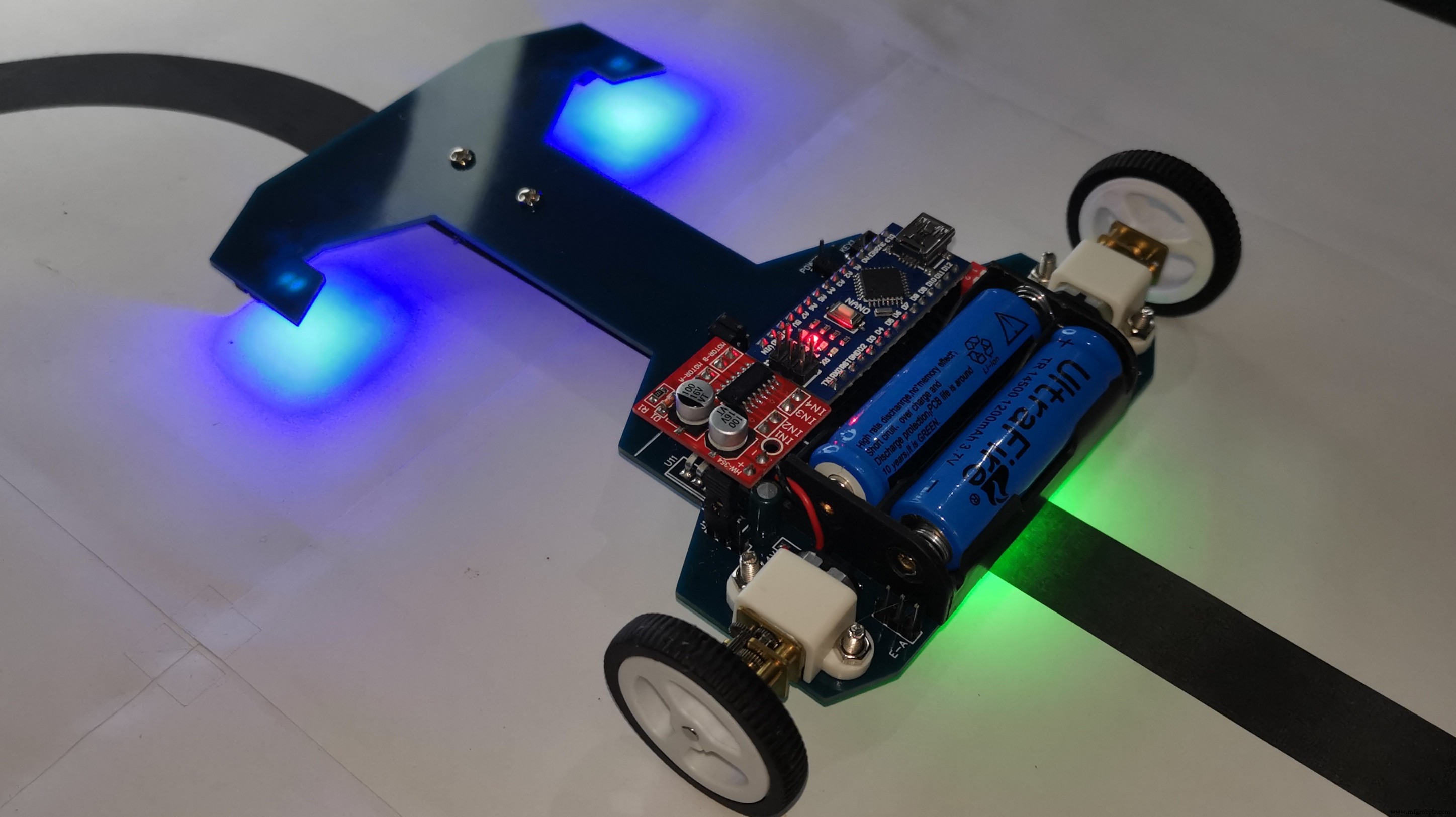
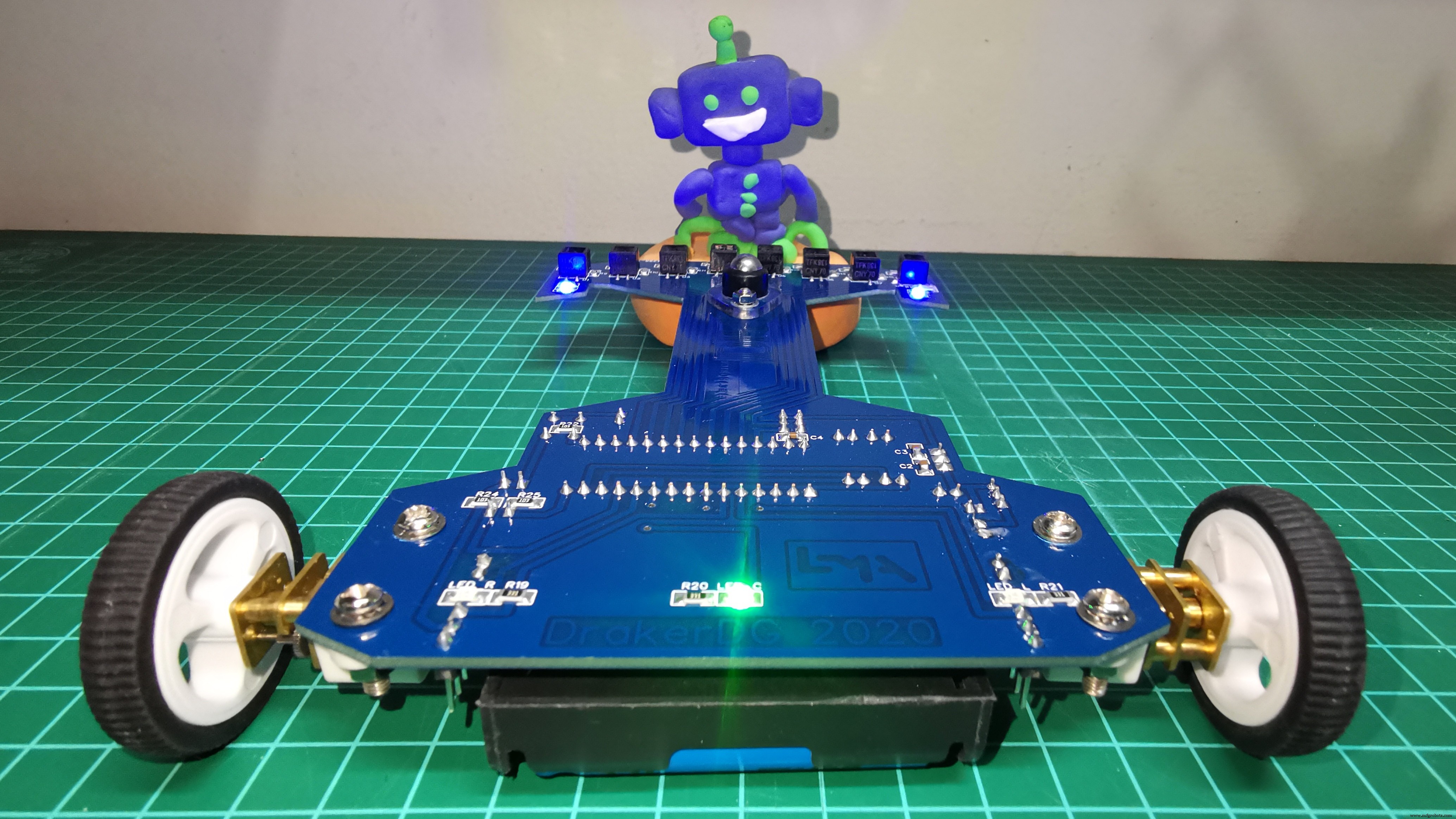
Dalam video berikutnya saya menunjukkan pengujian dengan 8 sensor CNY70. Sensor ini diukur secara analog, melalui port A0 hingga A7 dari Arduino Nano. Saya menggunakan algoritme awal untuk mengkalibrasi sensor dengan menormalkan kisaran dari 0 hingga 1000, di mana 0 mewakili latar belakang putih dan 1000 garis hitam. Setelah menyelesaikan kalibrasi, ia memasuki loop dan memulai siklus pembacaan, menghitung posisi dari 0 hingga 7000, yang masing-masing mewakili sensor kiri ke sensor kanan. Nilai posisi ini digunakan untuk menghitung kesalahan proporsional P. Rentang P adalah -3500 (kiri) hingga 3500 (kanan), dengan 0 sebagai nilai tengah. Algoritme mengingat nilai posisi sensor terakhir (kiri atau kanan) yang mendeteksi garis hitam, ini dengan tujuan menggunakan data ini untuk tindakan pengereman dan pemulihan jalur.
Tes akhir dengan sirkuit 95% terpasang, ditunjukkan dalam video berikut. Tes ampere terakhir dengan konsumsi maksimum 200mA.
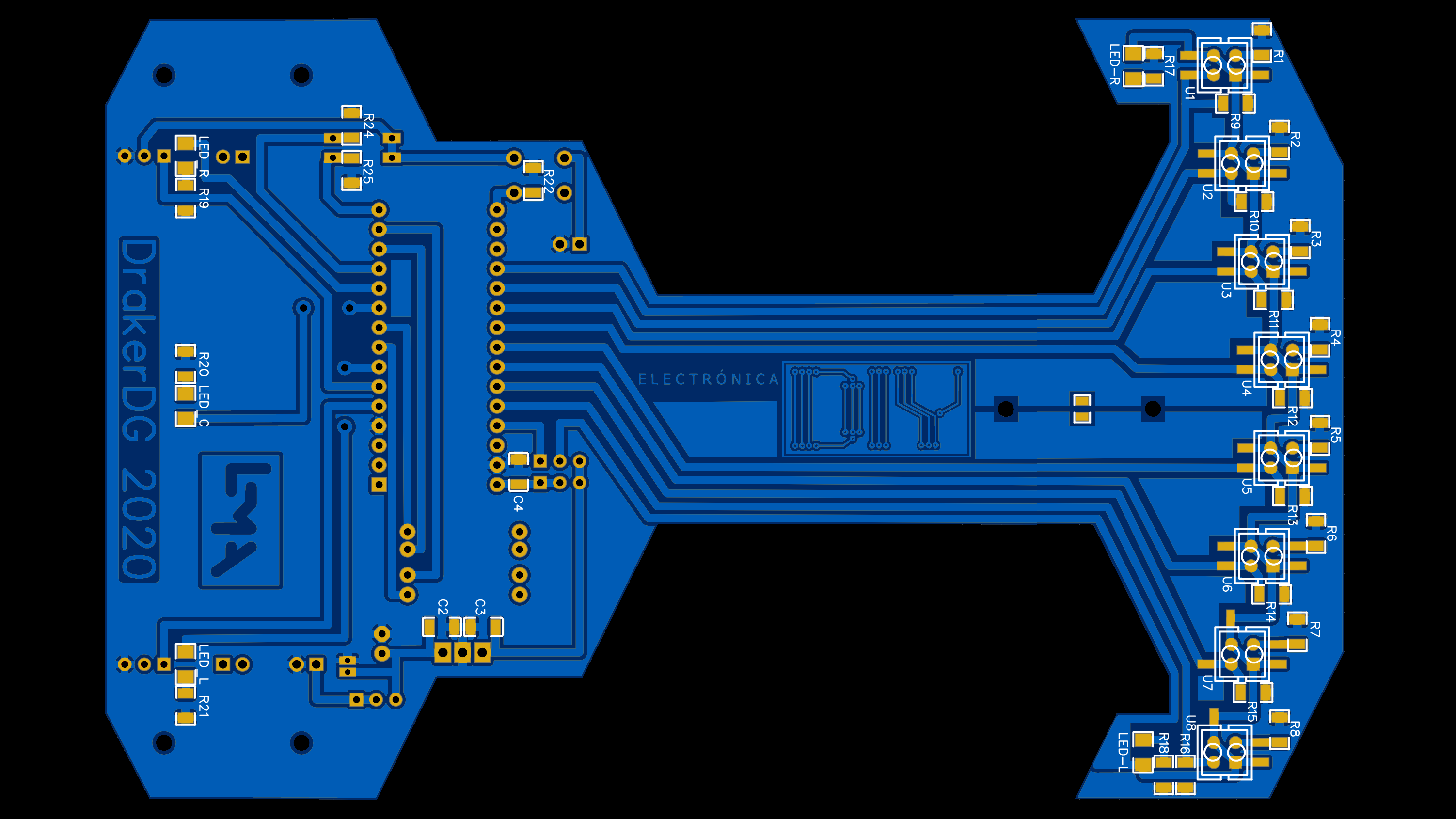
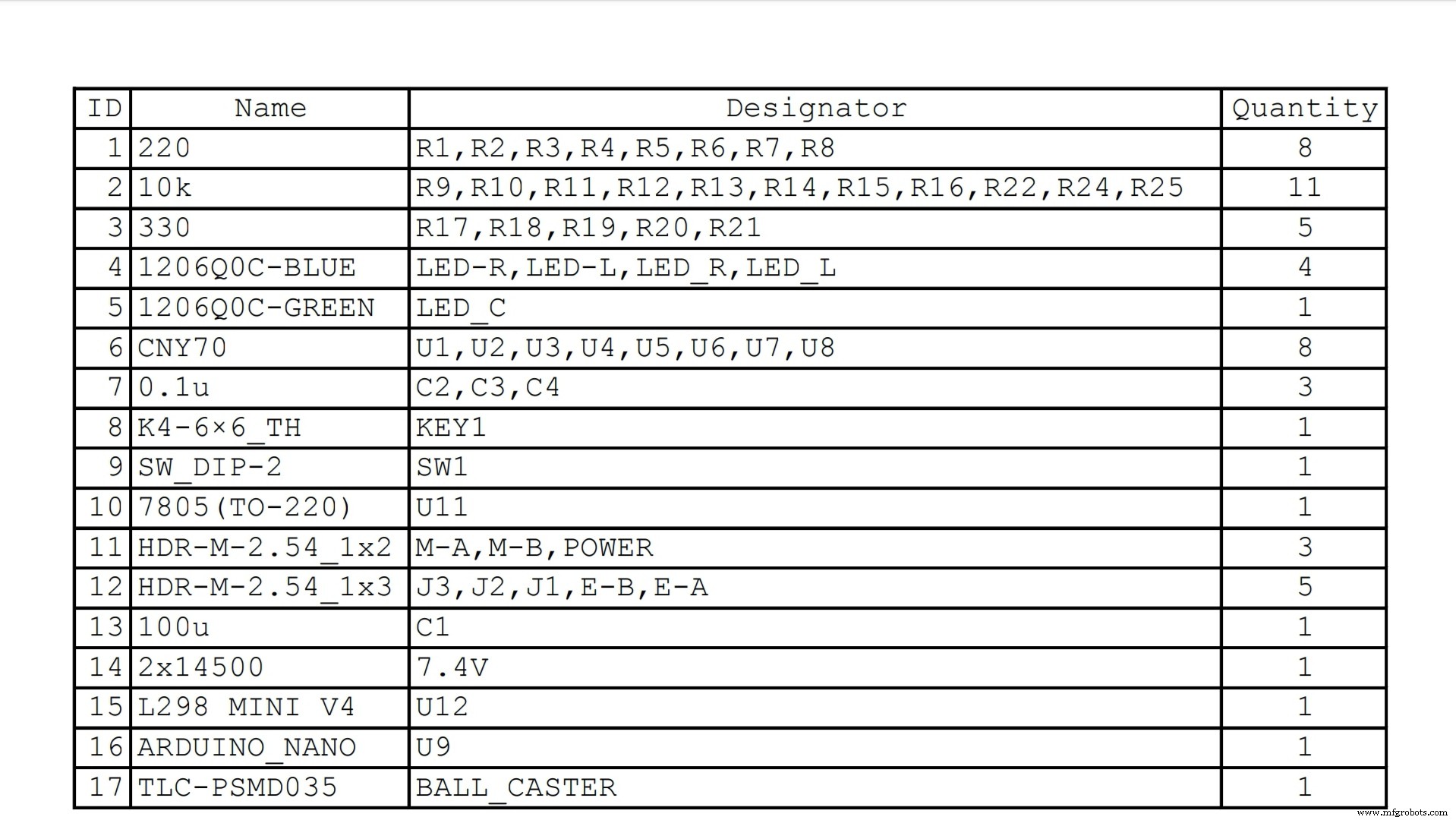
Ini adalah versi terbaru dari sirkuit cetak robot, siap diproduksi di JLCPCB.
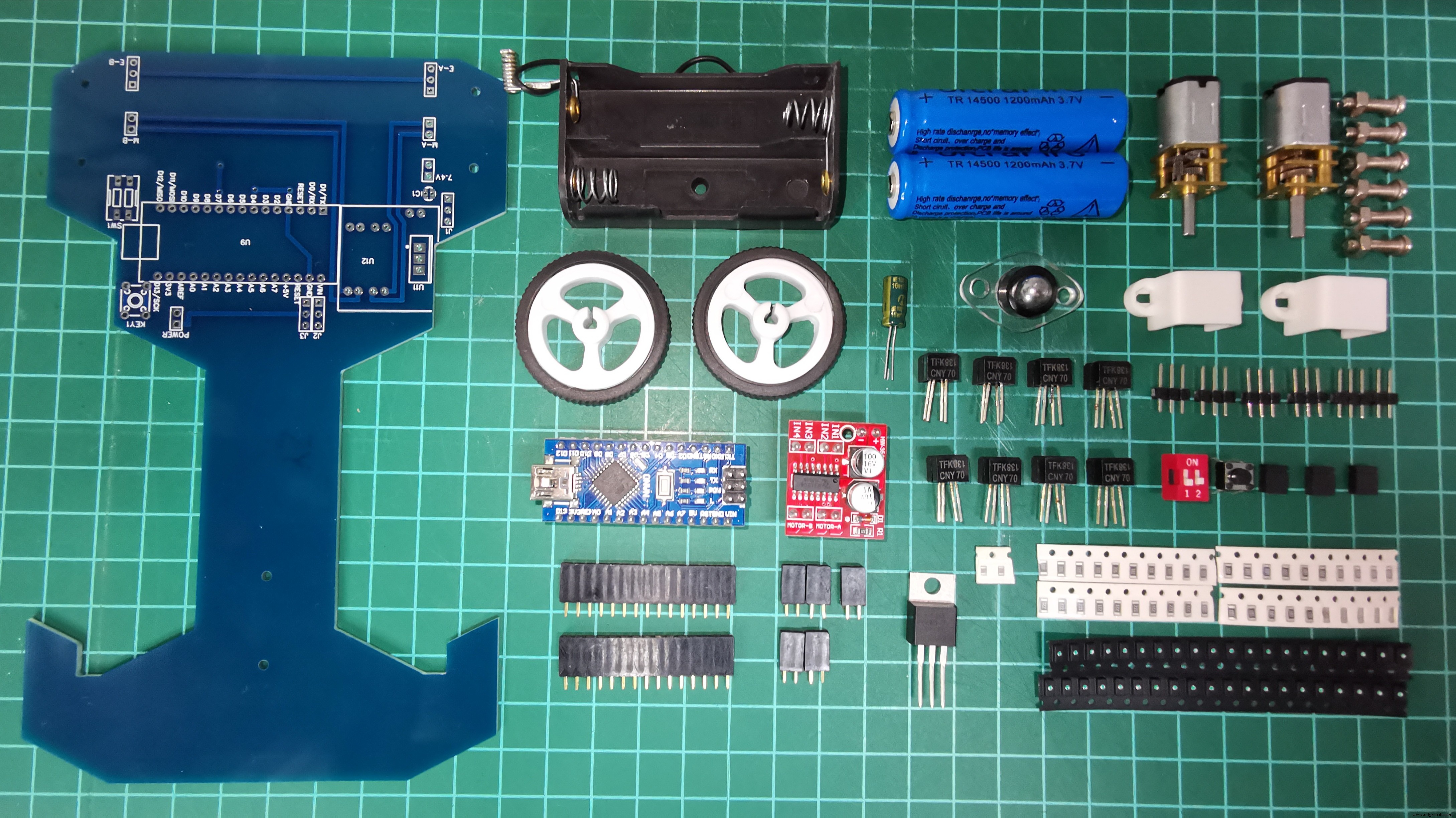
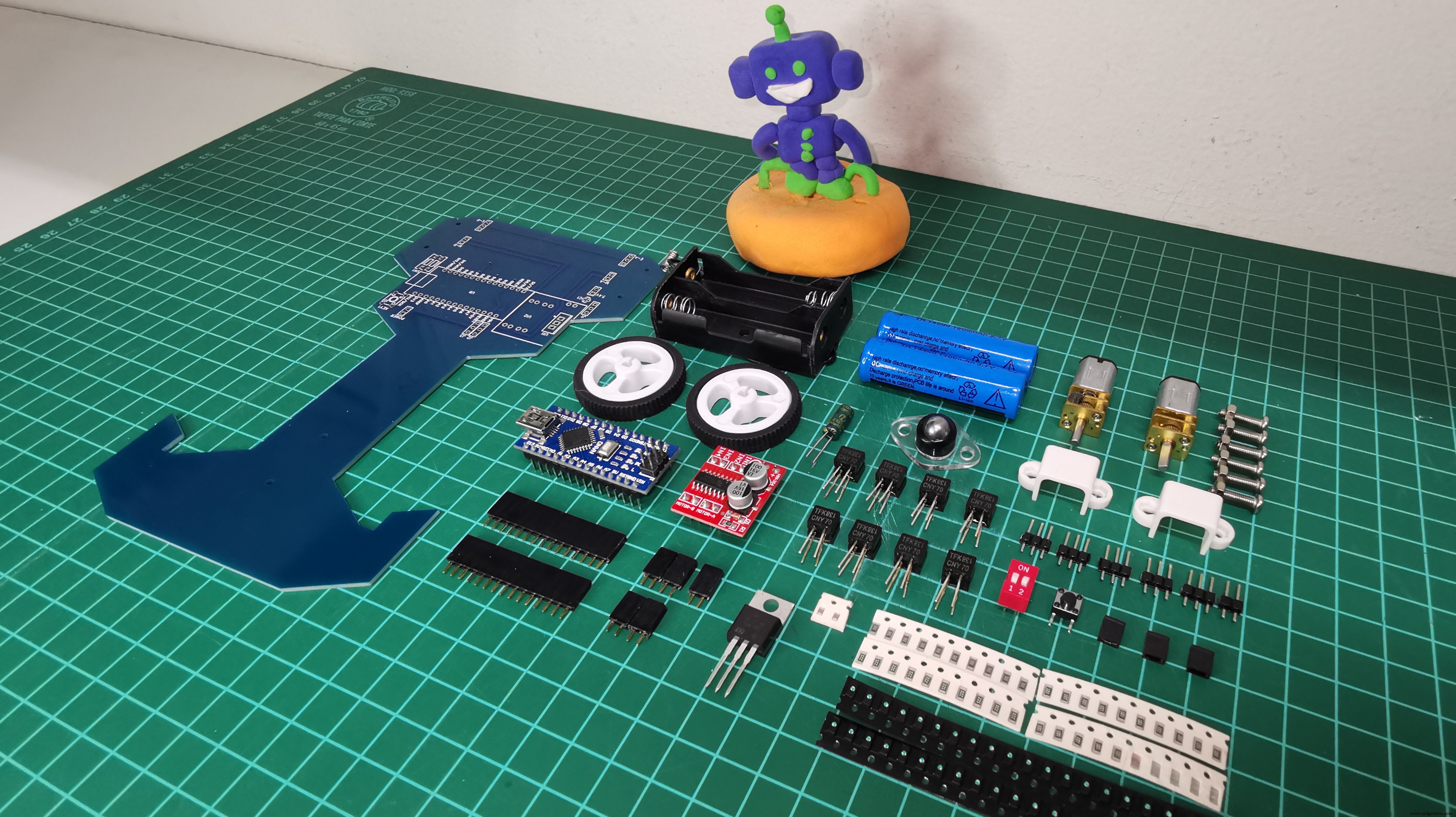
Ini unboxingnya.
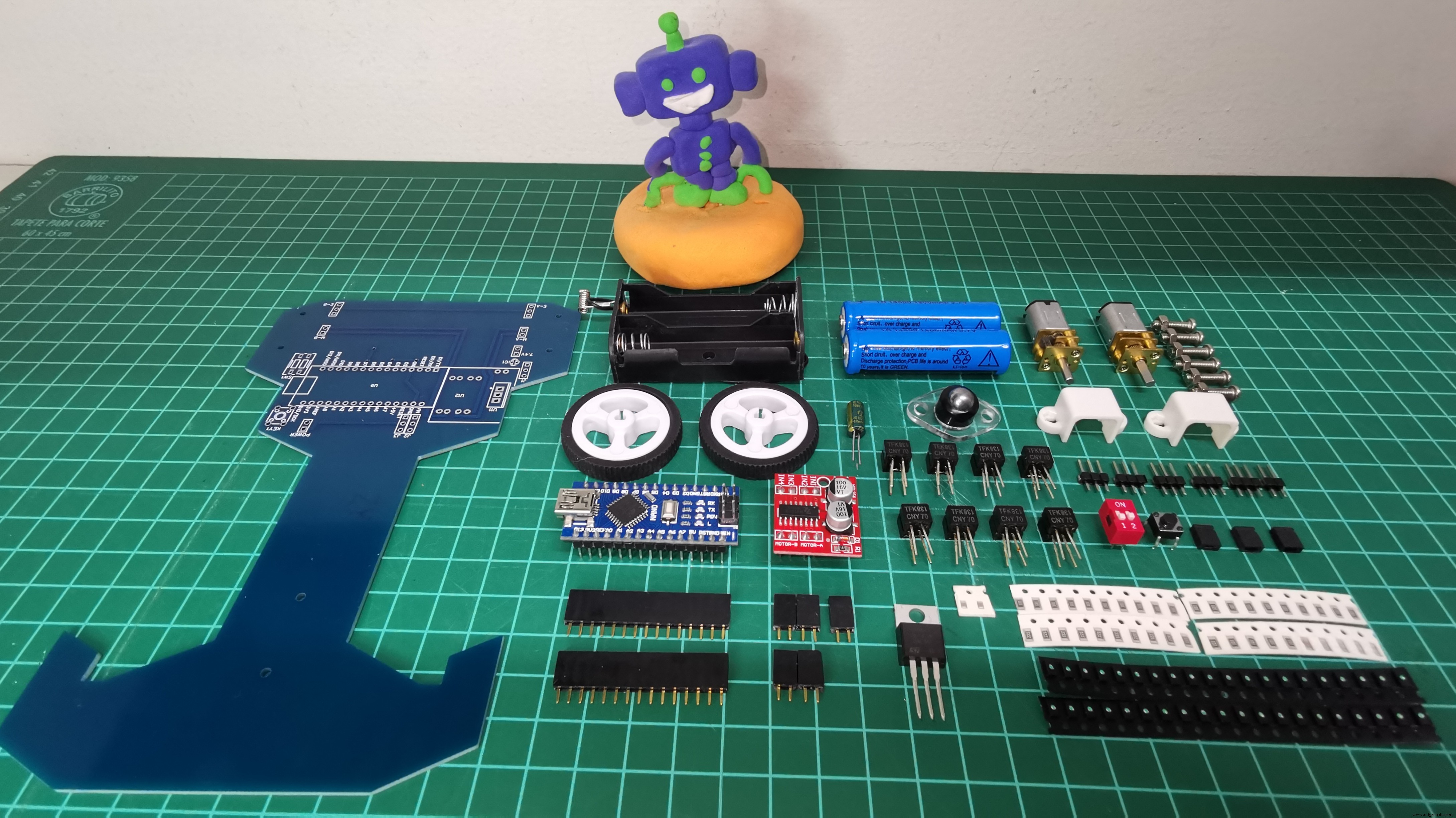

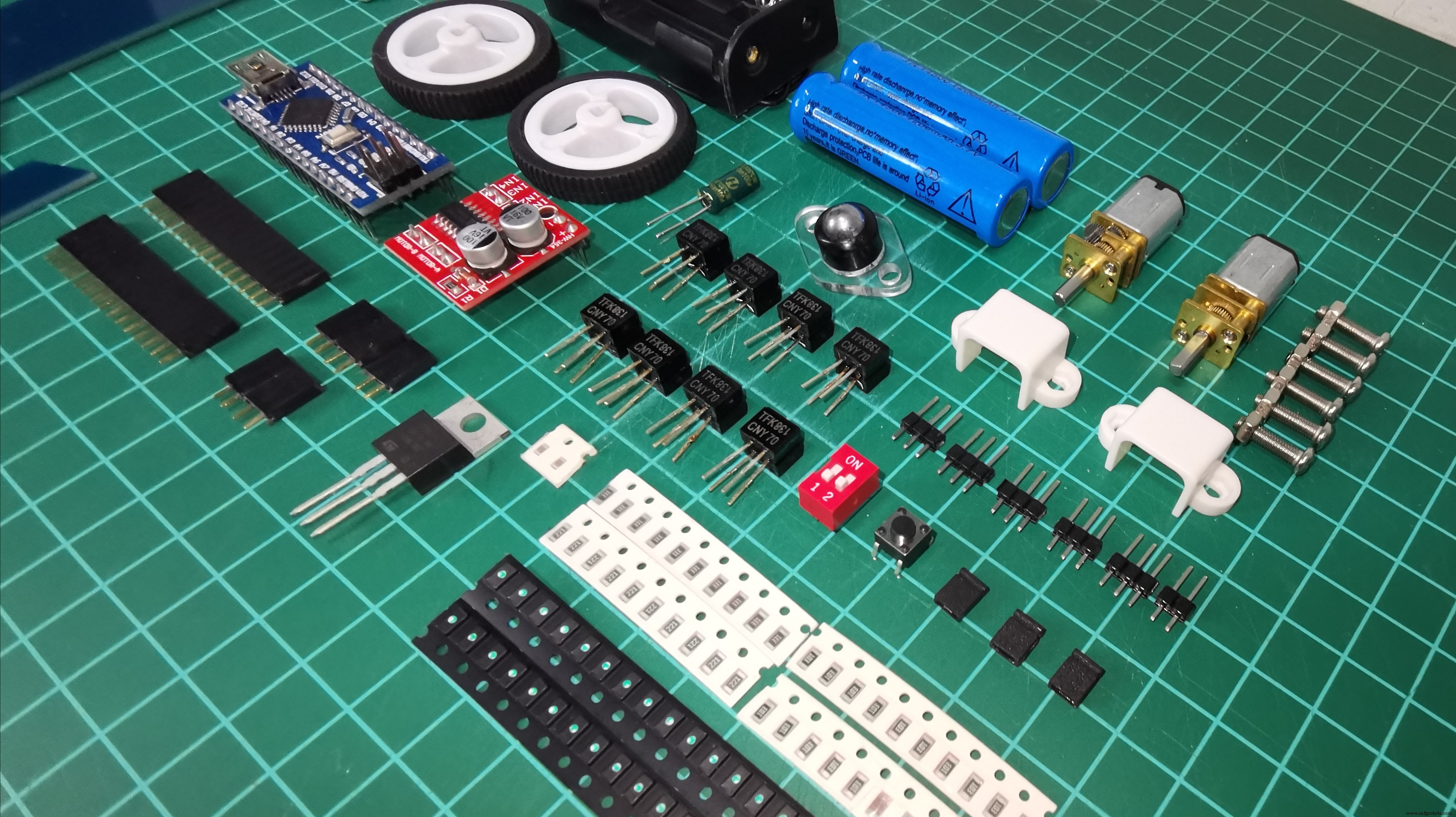
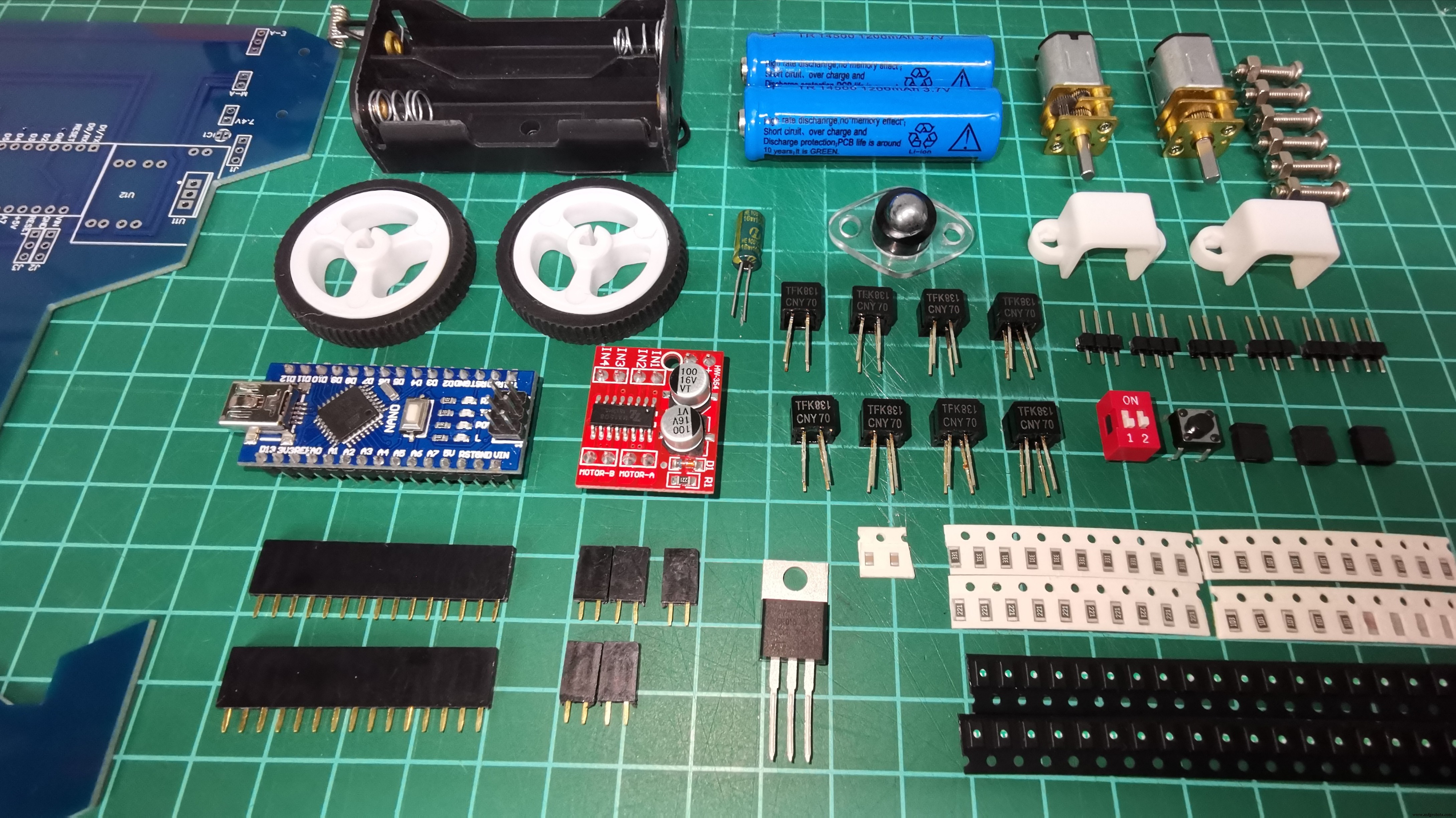



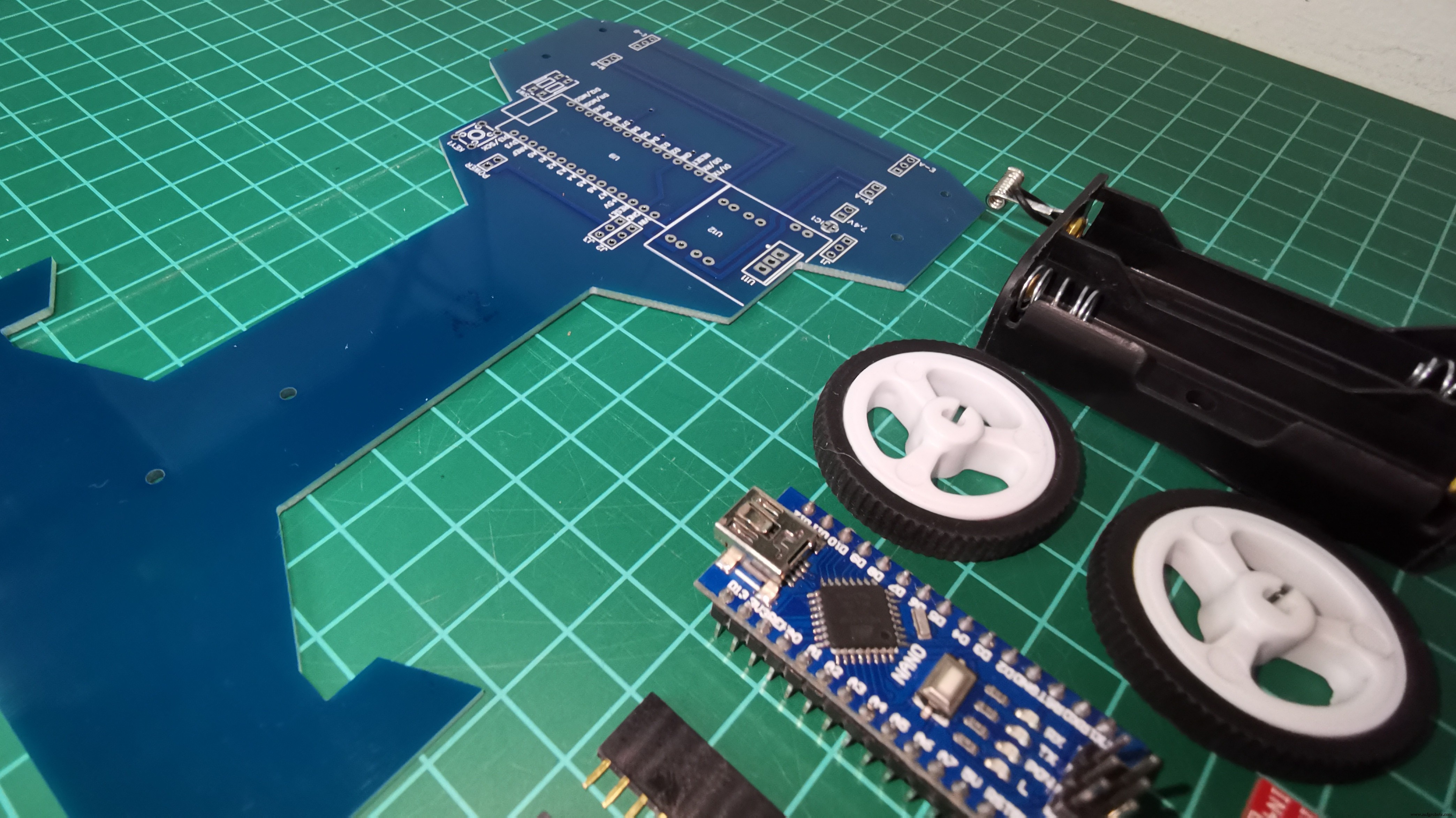
Di peregangan terakhir dan sudah dengan total potongan, saya menunjukkan perakitan Robot Pengikut Kecepatan pertama saya.
Akhirnya dan dengan banyak usaha saya sudah memiliki prototipe yang dibangun sepenuhnya, saya tunjukkan di bawah ini cara memuat kode (Mode Pemuatan Kode), bagaimana Anda dapat menguji sensor dan tentu saja tes di lintasan. Sangat senang dengan operasinya, kode uji berhasil mengontrol kode dengan sangat baik. Saya telah menggunakan algoritme PID (Penuh) untuk memuluskan koreksi dan mendapatkan kembali jalur. Karena semuanya dapat ditingkatkan, saya akan terus bermain dengan kode untuk mencapai versi yang lebih efisien.


Sebagai pelengkap, saya melakukan simulasi robot ini di aplikasi Webots. Ini masih dalam proses perbaikan tetapi saya membagikan video ini agar Anda dapat menghargai cara melakukan pengujian mekanis dan logis (Kode) untuk mengontrol robot di lingkungan virtual dan yang membantu memahami pengoperasian robot yang dibangun secara fisik.
Kode
Kode untuk mengontrol Robot Pengikut Garis Kecepatan V4
https://github.com/DrakerDG/Speed-Line-Follower-Robot/commit/12a807aed92c570dce12452064a5d6fe5053cb71