Tentang proyek ini
Pendahuluan
Suatu hari yang cerah, saya menimbang diri saya di timbangan. Tiba-tiba sebuah pikiran muncul di benak saya, 'Berapa massa Bumi?' Biarkan itu terpisah 'Bagaimana kita bisa mengukurnya?' Tidak ada timbangan seperti itu di mana Bumi dapat ditempatkan. Pasti ada cara tidak langsung untuk mengukur massa Bumi. Di sini saya menyajikan implementasi salah satu metode tidak langsung tersebut untuk mengukur massa Bumi.
Langkah 1:Metode Tidak Langsung
Pada awal abad kesembilan belas para ilmuwan menggunakan hukum kedua Newton dan hukum gravitasi universal Newton untuk mengukur massa Bumi. Persamaan ini berturut-turut adalah F =ma dan F=(GmM)/(r^2)(m=massa benda, a=percepatan, G=Konstanta Gravitasi, M=massa Bumi, r=Radius bumi) . Jika kita mengganti istilah percepatan 'a', yaitu percepatan gravitasi, dan menggabungkan kedua persamaan ini, kita dapatkan.
mg =GmM/r^2
Persamaan ini dapat diselesaikan untuk M yaitu massa bumi.
M =(gr^2)/G.
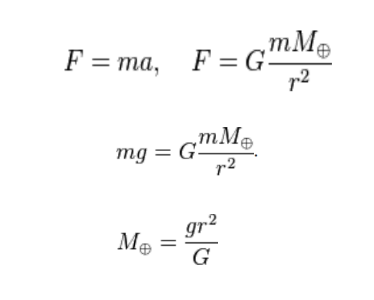
Kita akan berasumsi bahwa kita mengetahui nilai G dan r. Kami akan menemukan g yaitu percepatan gravitasi menggunakan percobaan kecil, yang melibatkan arduino dan beberapa sensor. Terakhir, kita akan menggabungkan semuanya untuk menemukan nilai M.
lihat gambar terlampir untuk ekspresi matematika yang tepat.
Mari kita mulai eksperimennya.
Langkah 2:Ikhtisar Eksperimen
(bersabarlah dengan saya untuk sedikit matematika di sini arduino akan segera dimulai)
Untuk menentukan percepatan gravitasi kita perlu mengetahui sesuatu yang disebut 'jatuh bebas', yaitu gerakan di mana suatu benda/benda bergerak ke bawah menuju bumi, hanya di bawah gaya gravitasi. Sekarang, ada beberapa istilah ilmiah yang mencirikan jatuh bebas ini. Mereka adalah kecepatan awal, kecepatan akhir, jarak yang ditempuh, waktu terbang dan percepatan.
- Kecepatan awal - kecepatan benda jatuh bebas pada awal jatuh bebas atau awal percobaan.
- Kecepatan akhir - kecepatan benda jatuh bebas pada akhir jatuh bebas akhir percobaan.
- Jarak yang ditempuh - jarak yang ditempuh benda jatuh bebas selama jatuh bebas.
- Waktu penerbangan - waktu yang dibutuhkan untuk menempuh jarak yang ditempuh saat jatuh bebas.
- Akselerasi - laju perubahan kecepatan yang diamati oleh tubuh saat jatuh bebas. Ini sama dengan percepatan gravitasi.
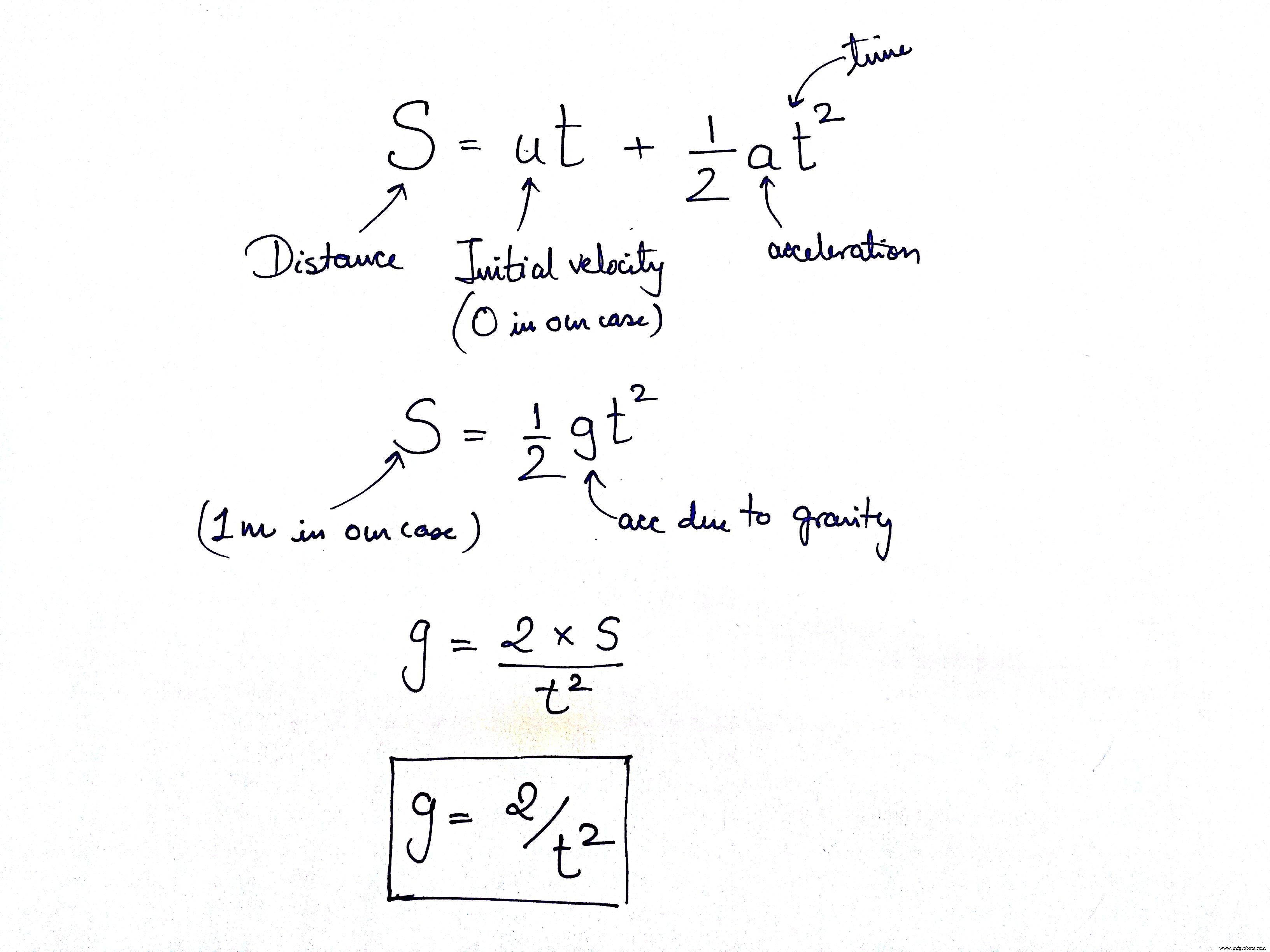
Sekarang, ada salah satu persamaan Newton yang berbunyi seperti -
Jarak tempuh =(kecepatan awal * waktu penerbangan) + (percepatan * (waktu penerbangan)^2)/2
Ada 4 variabel dalam persamaan di atas, termasuk salah satu yang kita minati yaitu 'percepatan', dari 4 variabel ini jika kita tahu 3 kita dapat menghitung variabel yang tidak diketahui ke-4 yang tersisa.
Kami dapat memperbaiki 2 di antaranya
- Jarak yang ditempuh =1 Meter (kita akan menjatuhkan benda kita dari ketinggian 1 meter)
- kecepatan awal =0 m/s (percobaan akan dimulai dari keadaan diam)
Kami memiliki 2 variabel yang tidak diketahui, di sinilah arduino masuk dan membantu kami menemukan waktu penerbangan. Untuk menentukan waktu penerbangan secara akurat, kita memerlukan dua stempel waktu 1. awal penerbangan dan 2. akhir penerbangan.
Kami akan membuat sirkuit khusus untuk menentukan dua stempel waktu ini di langkah 4, saya menjelaskan sirkuit untuk menemukan stempel waktu untuk awal penerbangan dan di langkah 5 akhir penerbangan.
Dengan bantuan arduino dan beberapa sensor kami akan menghitung waktu penerbangan, hanya menyisakan satu yang tidak diketahui dalam persamaan di atas yaitu percepatan gravitasi (bingoooo!!!).
Mari kita masukkan nilai variabel tetap kita ke dalam persamaan yang disebutkan di atas, untuk lebih menyederhanakan persamaan.
1 =(g * (waktu penerbangan)^2)/2
Jadi,
g =2 / (waktu penerbangan)^2
Detail eksperimen akan mengikuti langkah 7.
Jika ada keraguan, lihat gambar terlampir.
Langkah 3:Hal-hal yang Kita Butuhkan
Berikut adalah daftar hal-hal yang kita perlukan untuk eksperimen mengukur percepatan gravitasi.
- Papan Arduino apa saja, sebaiknya uno/duomilanove (tidak ada alasan khusus karena saya menggunakan papan ini untuk eksperimen ini)
- Kabel USB untuk menghubungkan Arduino ke PC
- Resistor 560 Ohm (4 dalam jumlah), resistor 100 Ohm (2 dalam jumlah)
- sensor piezoelektrik (4 dalam jumlah)
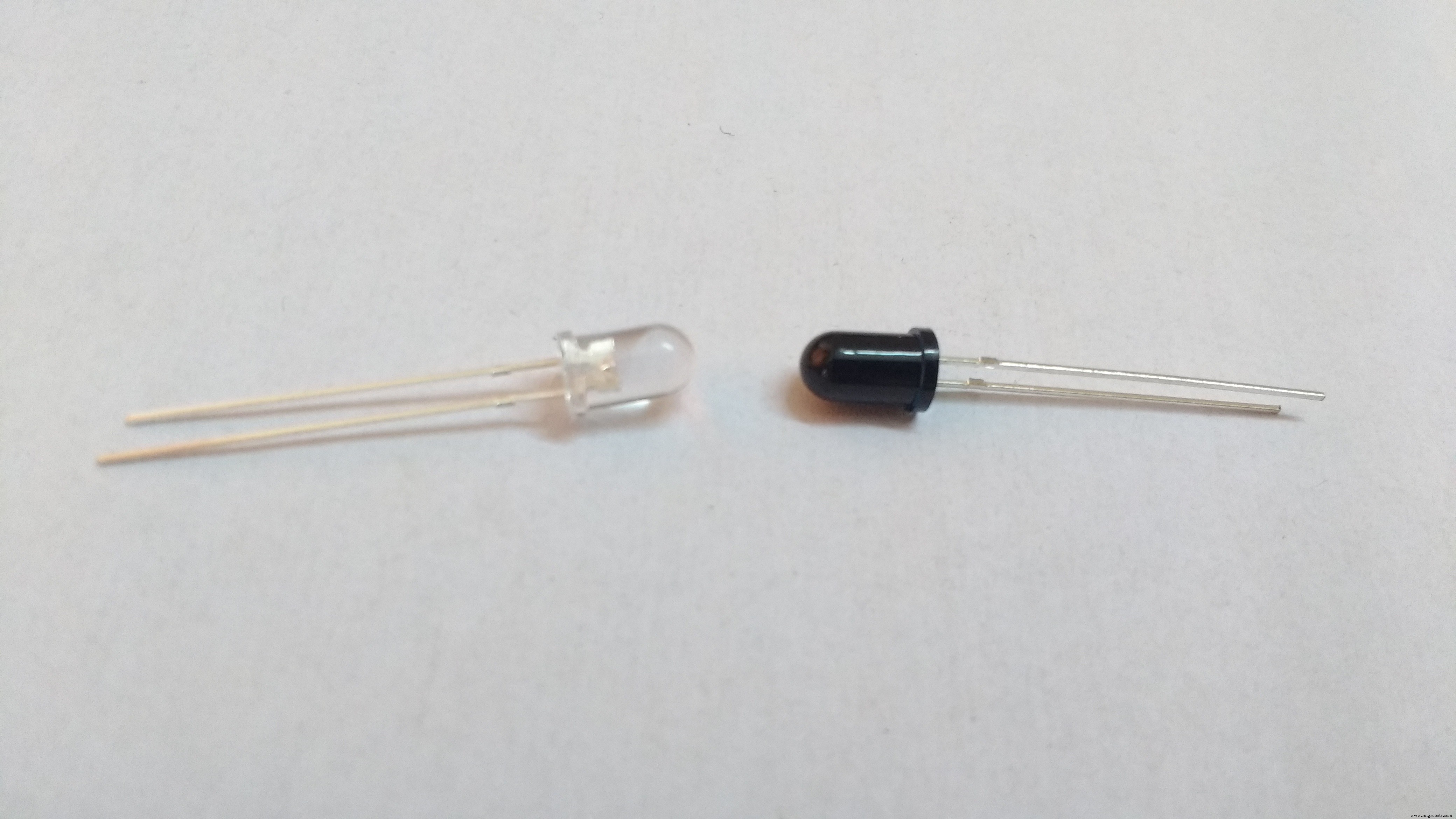
- Satu pasang IR Tx (IR LED) dan Rx (Photodiode)
- Satu potensiometer
- Satu opamp (seperti UA741C)
- Satu papan tempat memotong roti
- Tiga kabel sepanjang 1,2 meter
- PCB tujuan umum kecil berukuran 5cmx5cm untuk merakit sirkuit IR
- Pita
- Lembar karton
Jika ada keraguan, lihat Gambar terlampir.










Langkah 4:Skema 1:Sirkuit IR
Sirkuit ini akan digunakan untuk menandai waktu mulai jatuh bebas untuk benda yang digunakan untuk mengukur 'g'. Berikut adalah poin penting tentang gambar skema fritzing terlampir.
- LED IR digunakan dalam bias maju yang berfungsi sebagai LED biasa dalam aplikasi ini, yaitu menerangi Photodiode penerima IR.
- Fotodioda digunakan dalam bias terbalik.
- Output dari pertemuan katoda dan resistor dihubungkan ke salah satu terminal input opamp.
- Terminal input opamp lainnya terhubung ke potensiometer yang menentukan tegangan ambang.
- Keluaran opamp masuk ke papan Arduino.
Lihat video (waktu=5m 16 detik) jika ada keraguan.
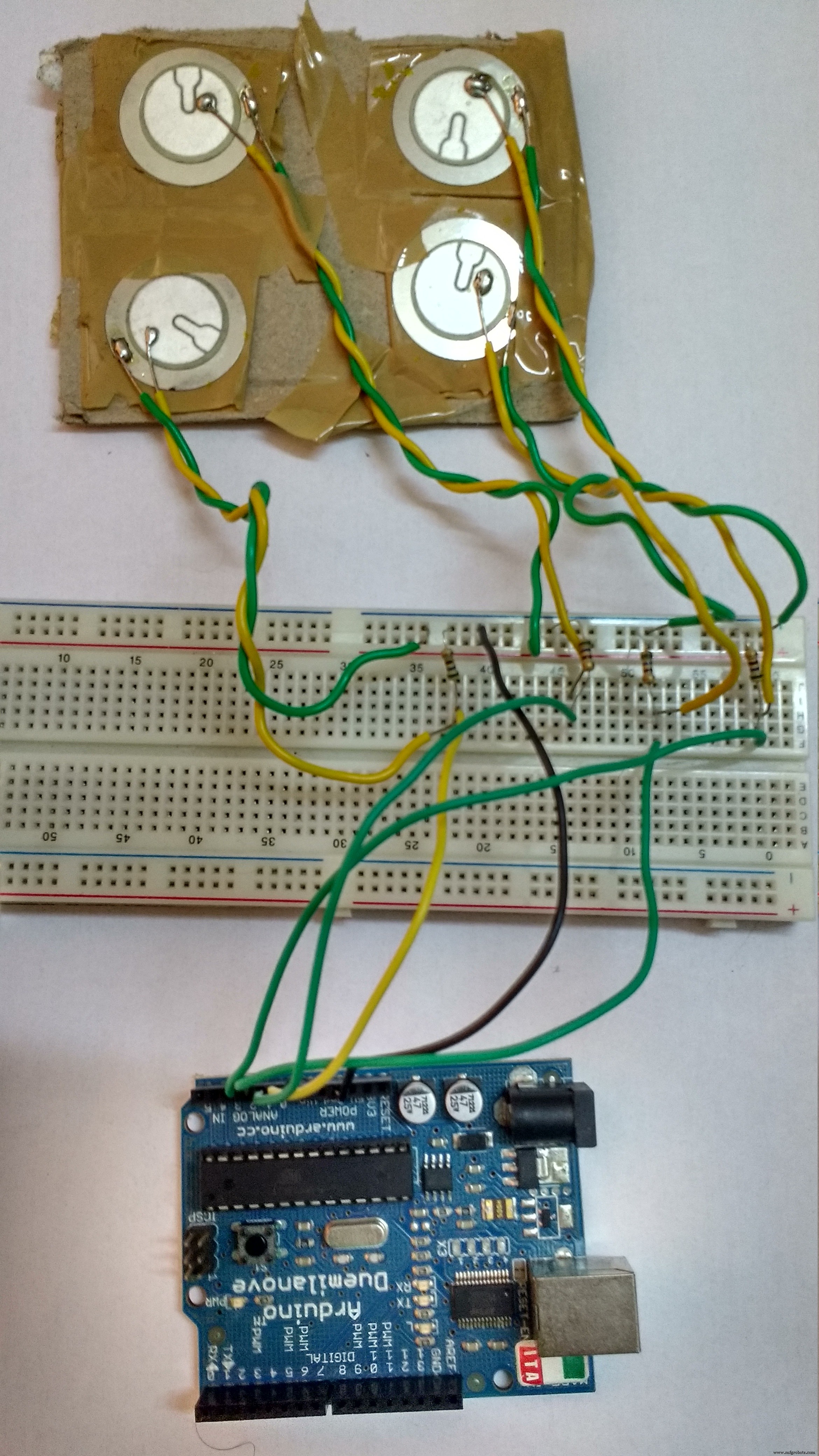
Langkah 5:Skema 2:Sirkuit Piezoelektrik
Sirkuit ini akan digunakan untuk menandai waktu akhir jatuh bebas untuk objek yang digunakan untuk mengukur 'g'. Berikut adalah poin penting tentang gambar skema fritzing terlampir.
- 4 sensor piezoelektrik terhubung seperti yang ditunjukkan dalam skema.
- Resistor 4 560 Ohm dihubungkan secara paralel dengan sensor piezoelektrik untuk mengurangi lonjakan tegangan yang dihasilkan oleh sensor piezoelektrik saat benda jatuh bebas menabrak permukaannya.
- Terminal negatif dari sensor piezoelektrik terhubung ke ground sirkuit.
- Terminal positif dari sensor piezoelektrik terhubung ke pin input analog.
Jika ragu, lihat video terlampir (waktu =9m 2 detik).
Langkah 6:Menyatukan Sesuatu
Ikuti petunjuk ini untuk menyatukan semuanya.
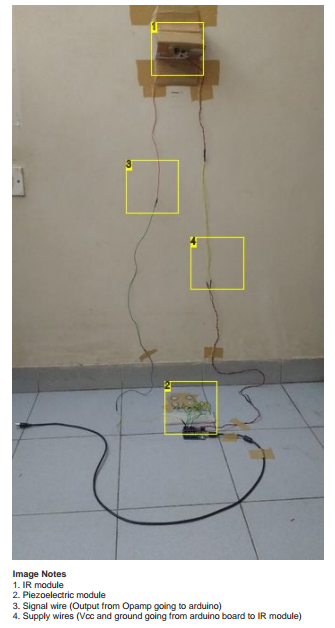
- Gunakan papan kartu untuk membuat struktur seperti atap dan tempelkan ke dinding sekitar 1,1 meter.
- Pasang modul IR menghadap ke bawah ke atap karton.
- Hubungkan output opamp ke pin no 4 Arduino menggunakan salah satu kabel sepanjang 1,2m.
- Hubungkan Vcc dan GND dari arduino ke modul IR menggunakan sisa kabel sepanjang 1,2m.
- Pastikan kabel terpasang dengan kuat ke dinding, modul IR ke atap kardus, modul piezoelektrik ke tanah tepat di bawah modul IR.
Jika ragu, lihat gambar terlampir, itu ditandai dengan benar untuk memudahkan pemahaman perakitan.
Langkah 7:Detail Eksperimen
Dengan semua hal di tempatnya (kecuali kode Arduino, dibahas pada langkah 8), mari kita lakukan prosedur percobaan ini.
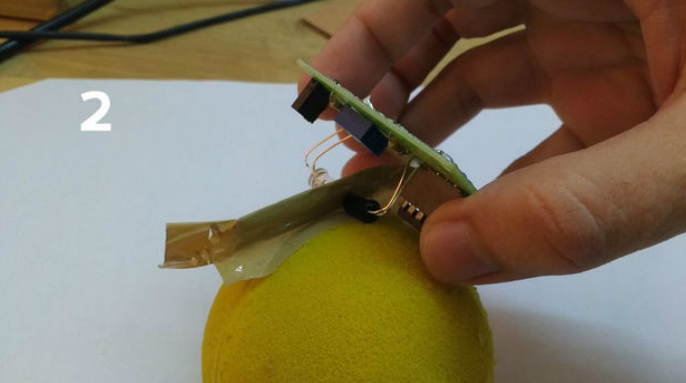
- Tempelkan proyeksi tipis kecil di atas benda yang digunakan untuk jatuh bebas seperti yang ditunjukkan pada gambar bernomor 1.
- Sebelum kita meninggalkan objek kita untuk jatuh bebas, pegang objek tersebut tepat pada tanda 1 meter, sehingga proyeksi di bagian atas menghalangi cahaya dari IR ke foto dioda. Seperti yang ditunjukkan pada gambar bernomor 2.
- meninggalkan objek tanpa memberikan kekuatan apa pun untuk membiarkannya jatuh bebas di zona pendaratan piezoelektrik.
- Saat jatuh, tidak ada halangan di jalur IR TX dan RX, memberi kita sinyal tentang objek yang baru saja ditinggalkan dalam hal waktu mulai jatuh bebas.
- Saat objek menyentuh zona pendaratan, sensor piezoelektrik menghasilkan lonjakan tegangan terkontrol yang memberi tahu kedatangan objek dalam hal waktu berakhirnya jatuh bebas.
- Jika kita mengurangkan waktu berakhir dari waktu awal kita mendapatkan waktu terbang yang akan kita gunakan untuk menghitung percepatan gravitasi seperti yang kita bahas pada langkah 2.

Langkah 8:Kode Arduino
Saya melampirkan kode Arduino untuk percobaan ini. Kode sangat sederhana. Jika ada keraguan, lihat video di mana saya menjelaskan kode secara detail (waktu dalam video =13 menit 35 detik).
Langkah 9:Ayo lakukan eksperimen
Hal-hal berikut harus diperhatikan sebelum melakukan eksperimen ini.
- Ambang batas sensor piezoelektrik harus disetel dengan benar dalam kode arduino.
- Tempatkan panel piezoelektrik tepat di bawah modul IR.
- Pastikan Anda menjatuhkan objek dari 1 Meter tanpa memberikan kekuatan eksternal apa pun.
Di sini saya melakukan percobaan ini pada stempel waktu 17 menit dalam video terlampir. Kami akan menghitung Massa bumi menggunakan hasil yaitu waktu penerbangan yang diperoleh dari eksperimen ini.
Langkah 10:Hasil dan massa Bumi
Setelah mengulangi percobaan ini selama 3 kali saya mendapatkan hasil berikut dalam hal Waktu Penerbangan.
Mari kita ambil rata-rata.
Waktu rata-rata penerbangan =450 ms
Jika kita substitusi nilai ini dalam persamaan untuk mendapatkan percepatan gravitasi kita mendapatkan percepatan menjadi sekitar 9,8755 m/s2. Seperti yang terlihat pada gambar terlampir.
Akhirnya dengan mensubstitusi nilai 'g' ini untuk mendapatkan massa bumi, kita dapatkan sekitar 6,0066 x 1024 Kg, seperti yang Anda lihat pada gambar terlampir.
Massa sebenarnya Bumi menurut google adalah 5,972 x 1024 Kg. Saya pikir kami sudah dekat.
Terima kasih atas waktu Anda, Jika ada keraguan, lihat video atau tulis di komentar, saya akan dengan senang hati membantu.

Kode
Kode ArduinoArduino
kode arduino sederhanaconst int sensorPin1 =A0;const int sensorPin2 =A1;const int sensorPin3 =A2;const int sensorPin4 =A3;const int photoPin =4;const int ledPin =13;const int threshold =110;char stringToPrint [100];int startTime,endTime;int val1,val2,val3,val4;void setup() { Serial.begin(115200); // letakkan kode setup Anda di sini, untuk dijalankan sekali:pinMode(ledPin,OUTPUT); pinMode(sensorPin1,INPUT); pinMode(sensorPin2,INPUT); pinMode(sensorPin3,INPUT); pinMode(sensorPin4,INPUT); pinMode(photoPin,INPUT);}void loop() { // letakkan kode utama Anda di sini, untuk dijalankan berulang kali:int start =digitalRead(photoPin); waktu mulai =mili(); if(mulai ==TINGGI) digitalWrite(ledPin,HIGH); while(mulai ==RENDAH) { digitalWrite(ledPin,RENDAH); val1 =analogRead(sensorPin1); val2 =analogRead(sensorPin2); val3 =analogRead(sensorPin3); val4 =analogRead(sensorPin4); //sprintf(stringToPrint,"%d,%d,%d,%d",val1,val2,val3,val4); //Serial.println(stringToPrint); if((val1>=threshold) || (val2>=threshold) || (val3>=threshold) || (val4>=threshold)) { endTime =millis(); sprintf(stringToPrint,"%d ms",endTime - startTime); Serial.println(stringToPrint); digitalWrite(ledPin,TINGGI); penundaan (1000); digitalWrite(ledPin,RENDAH); mulai =TINGGI; } }} Skema
skema fritzing untuk sirkuit IR 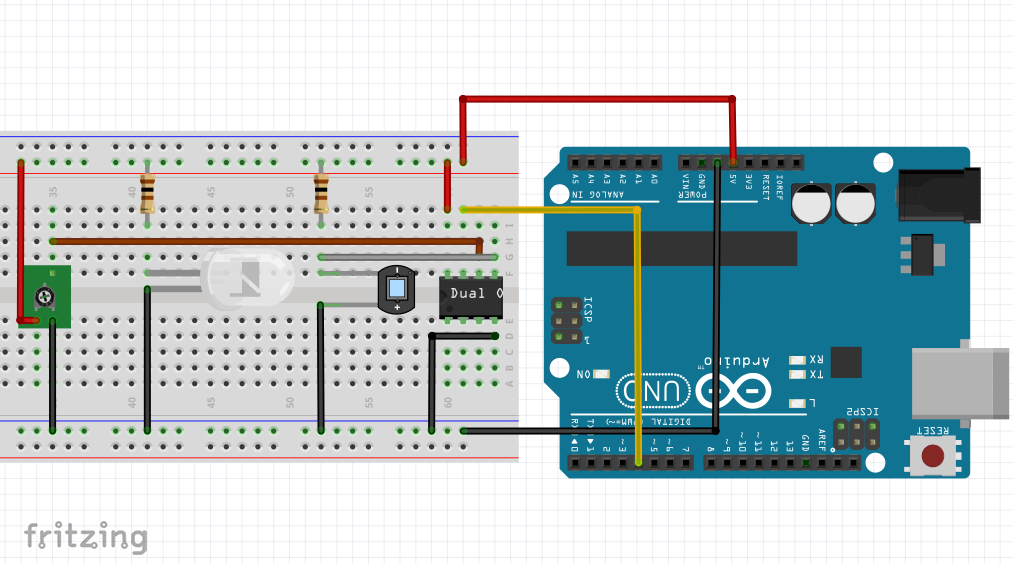 gambar perangkat keras
gambar perangkat keras 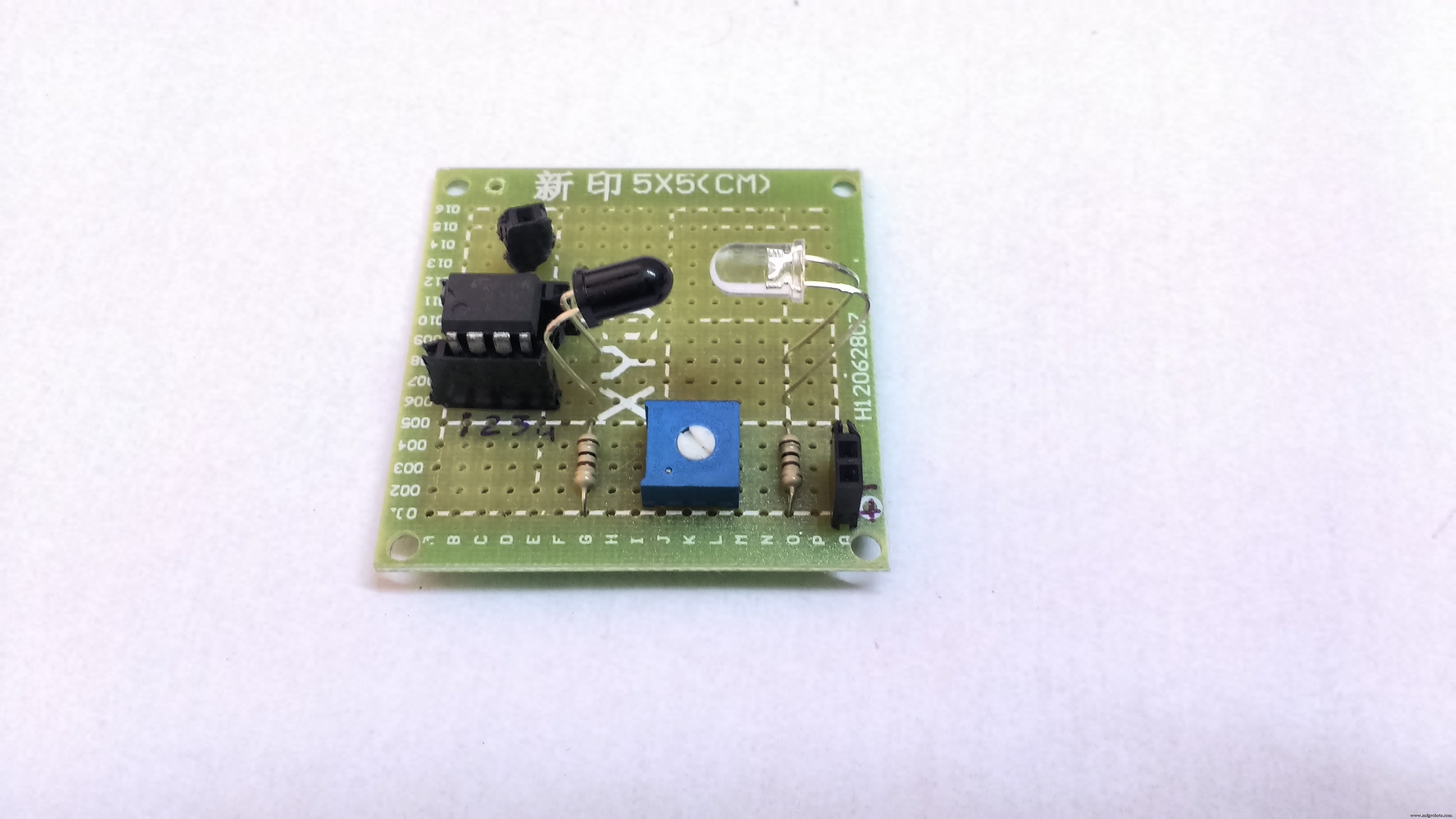 skema fritzing
skema fritzing 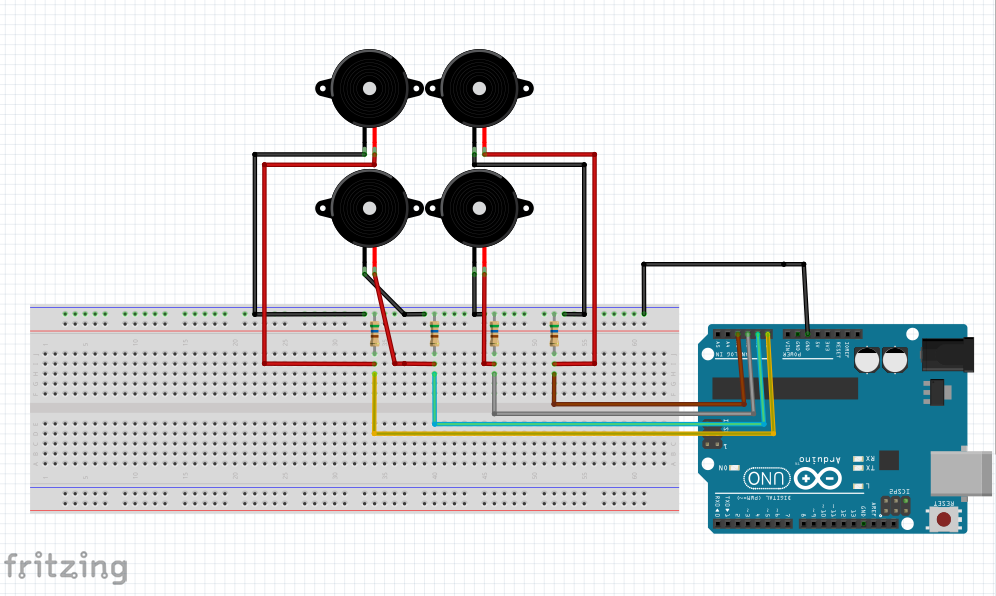 gambar perangkat keras
gambar perangkat keras