Tentang proyek ini
Halo semuanya, hari ini saya akan menunjukkan bagaimana saya membuat robot MIA-1, yang tidak hanya canggih dan unik tetapi juga open source dan dapat dibuat tanpa pencetakan 3D! Ya, Anda mengerti, robot ini sepenuhnya buatan tangan. Dan sumber terbuka artinya - Anda mendapatkan kode dan setiap detail secara gratis , Anda juga dapat membuat robot ini jika Anda mau.
Di sini kita hanya melihat pidatonya, tapi masih banyak lagi yang bisa dia lakukan!
Inilah hal-hal yang dapat dia lakukan:
- Dapat mendengarkan dan berbicara kembali dengan Anda
- Dapat melihat dan mengenali Anda menggunakan kamera mata kirinya
- Dapat mendeteksi gerakan dan mengambil foto
- Memiliki GUI dengan LCD layar sentuh untuk memerintahkannya
- Menampilkan gambar di lcdnya
- Unduh gambar dan acara di layarnya
- Dapat menargetkan sesuatu menggunakan penunjuk laser di tangan kanannya
- Menggerakkan tangan saat berbicara
- Berdiri tanpa bantuan orang lain
- Dia juga bisa membungkuk (tonton videonya)
- Dan masih banyak lagi!
Persediaan:
Untuk membuat robot ini, saya menggunakan semua yang tersedia di toko lokal kami.
Mikrokontroler + Komputer (Otak):
- Arduino Mega (untuk mengendalikan motor servo)
- Komputer lengkap (Anda dapat menggunakan Raspberry Pi, tetapi saya menggunakan laptop saya sebagai otaknya pada awalnya)
Motor Servo:
MIA-1 memiliki 13 derajat kebebasan.
- Motor servo sumbu ganda LDX227 8x
- Motor servo MG996r / MG996 3x
- Untuk figer saya pakai micro servo sg90
Perhatikan bahwa saya telah menambahkan cakar robot dan menggunakan motor servo MG996r lainnya.
Dan kabel jumper dan lain-lain
Visi:
Untuk pemrosesan gambar seperti mengambil foto dan mendeteksi wajah, dll. Saya telah menggunakan kamera USB .
Langkah 1:Tata Letak Bodi dan Motor 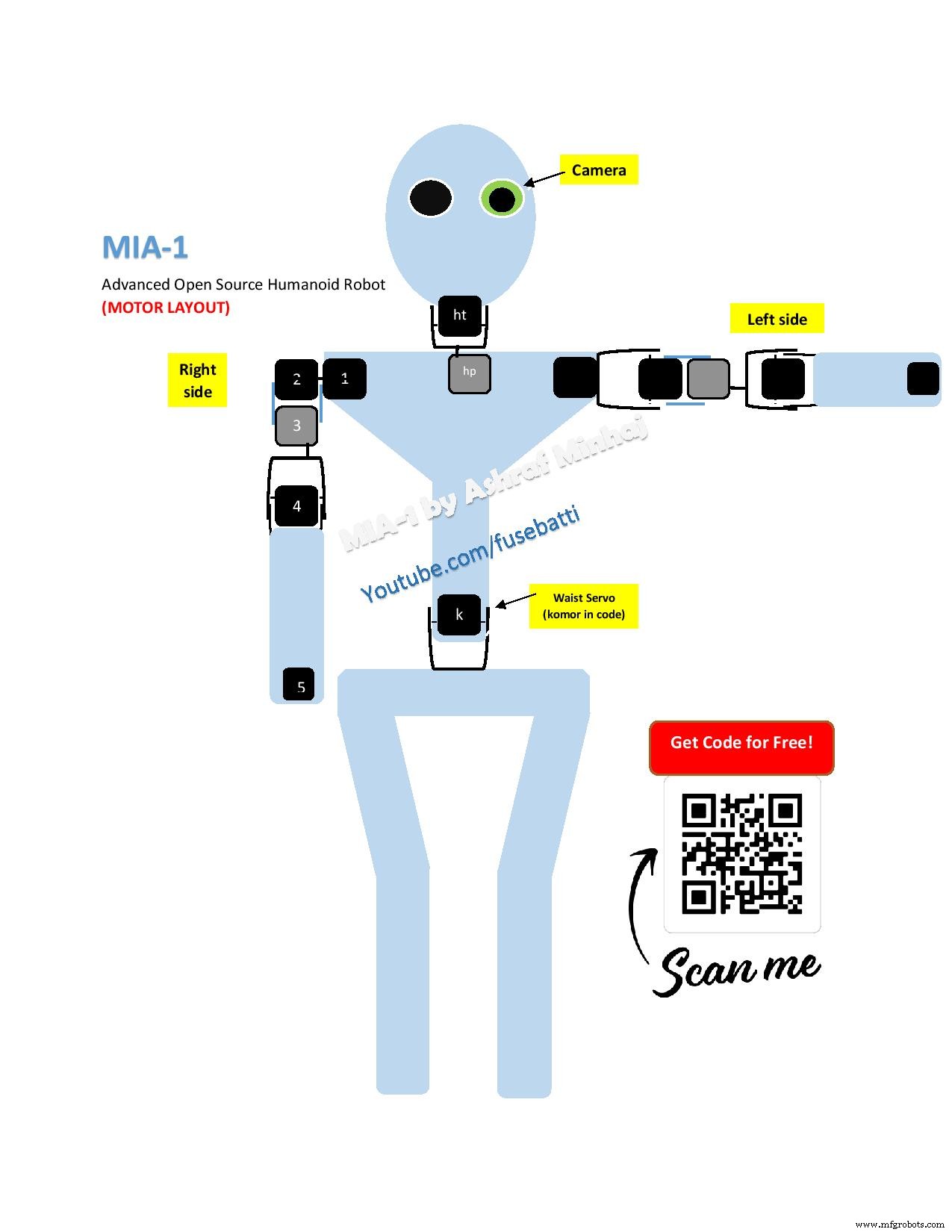

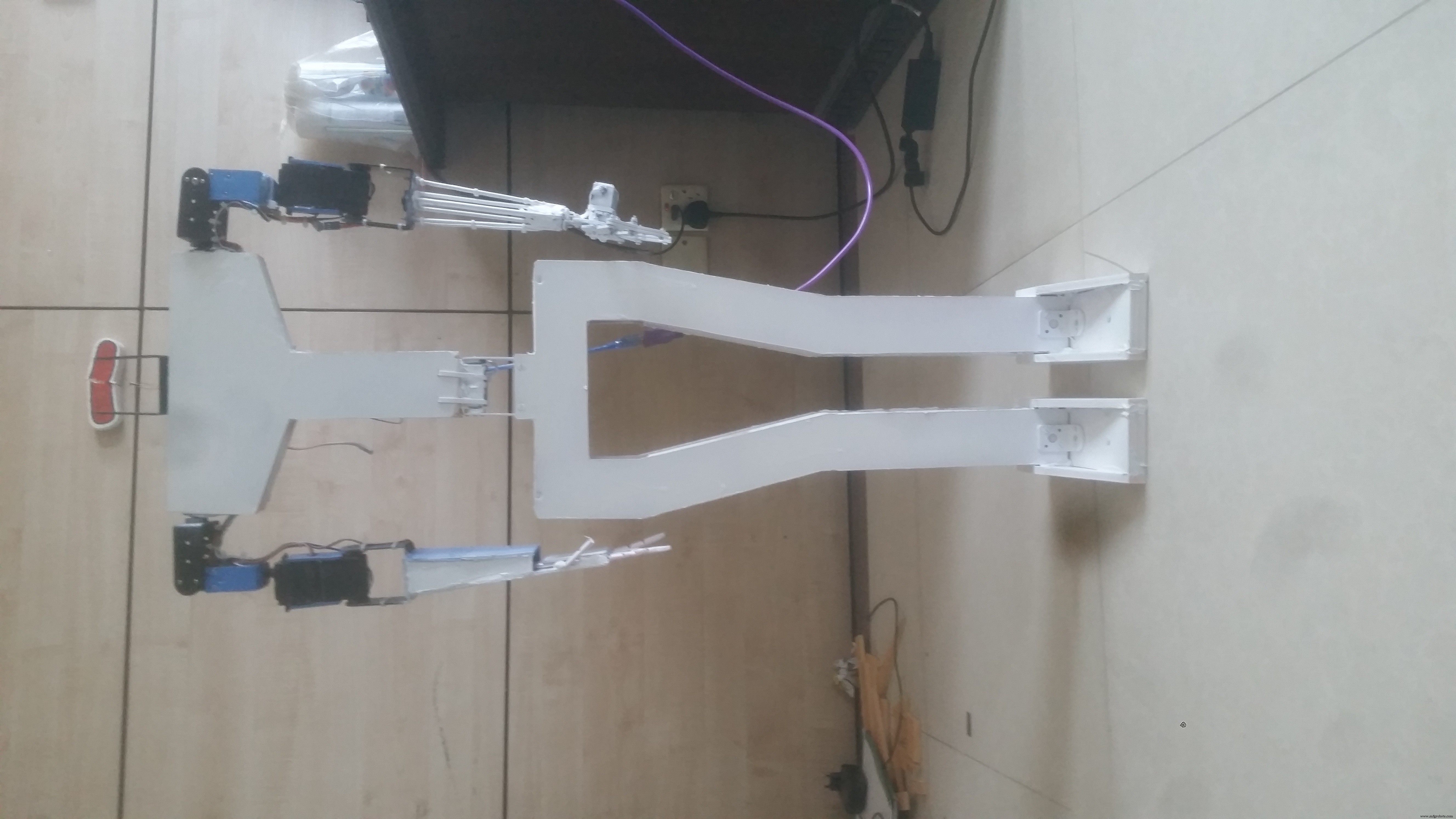
Tubuh dibuat menggunakan lembaran PVC, potongan yang berbeda direkatkan menggunakan Lem Panas dan sekrup (Lihat gambar). Saya telah memotong lembaran pvc menggunakan pisau pemotong (hati-hati!! jangan potong jari anda!!). Dari gambar satu dan dua Anda dapat melihat tata letak servo. Saat saya membuat robot perempuan, saya memberinya bentuk dan sosok tubuh perempuan.
Konektor servo dibuat menggunakan lembaran pvc tipis karena dapat ditekuk dengan baik.
Kepala dibuat menggunakan balon, ditiupkan udara di dalam balon (lihat gambar), ditambahkan kertas-kertas basah kecil-kecil kemudian dikeringkan. Setelah menambahkan 8 lapisan menjadi kuat dan berkelanjutan.
Baru kemudian diwarnai putih (seluruh tubuh) menggunakan spray color.
Ternyata desainnya sangat seimbang dan dia (MIA-1) berdiri tepat di atas kakinya!!
Menambahkan tampilan:
Setelah itu baru menggunakan beberapa sekrup dan lem panas untuk memasang lcd di dadanya (foto terakhir).
Langkah 2:Diagram Sirkuit 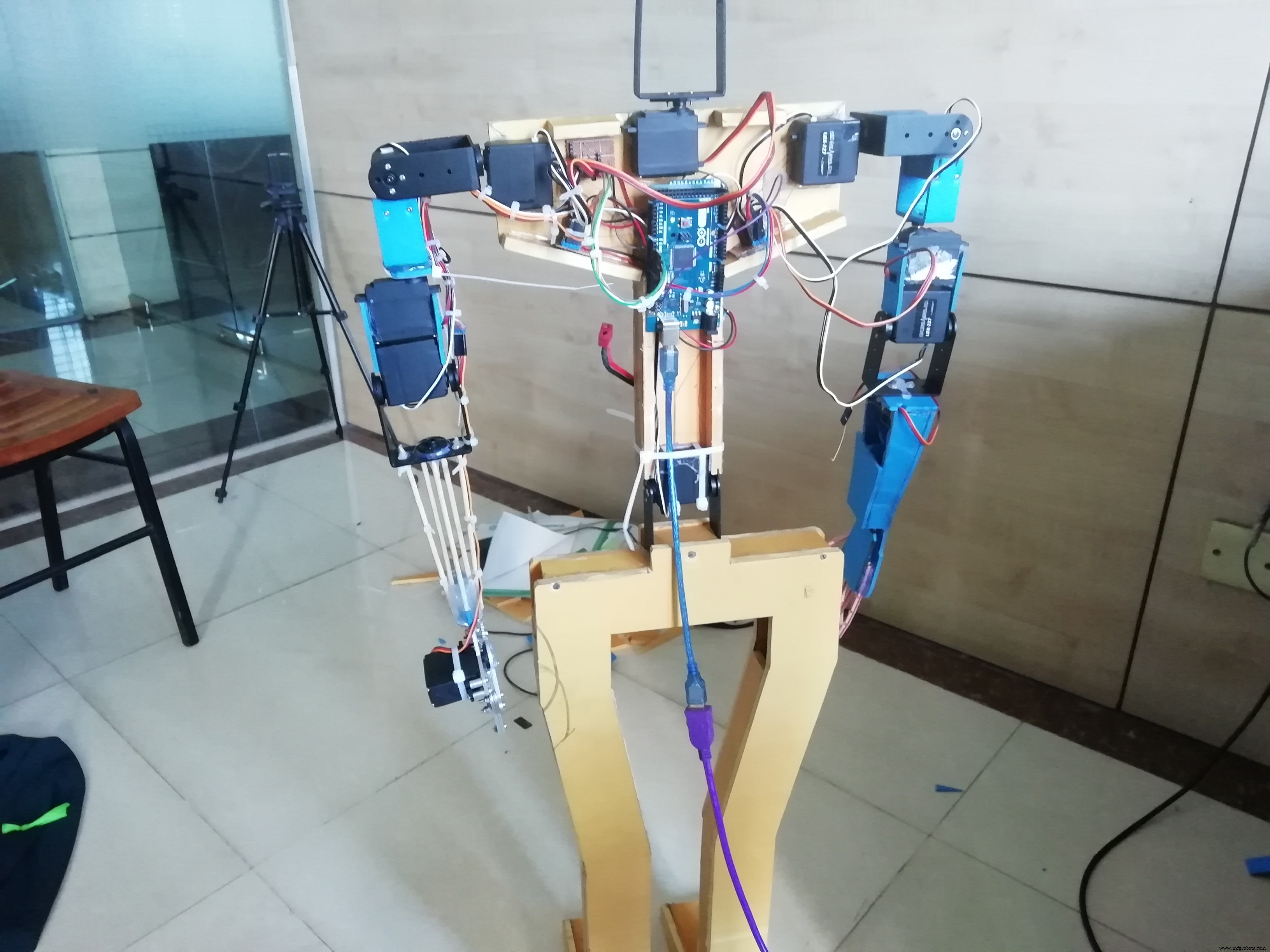
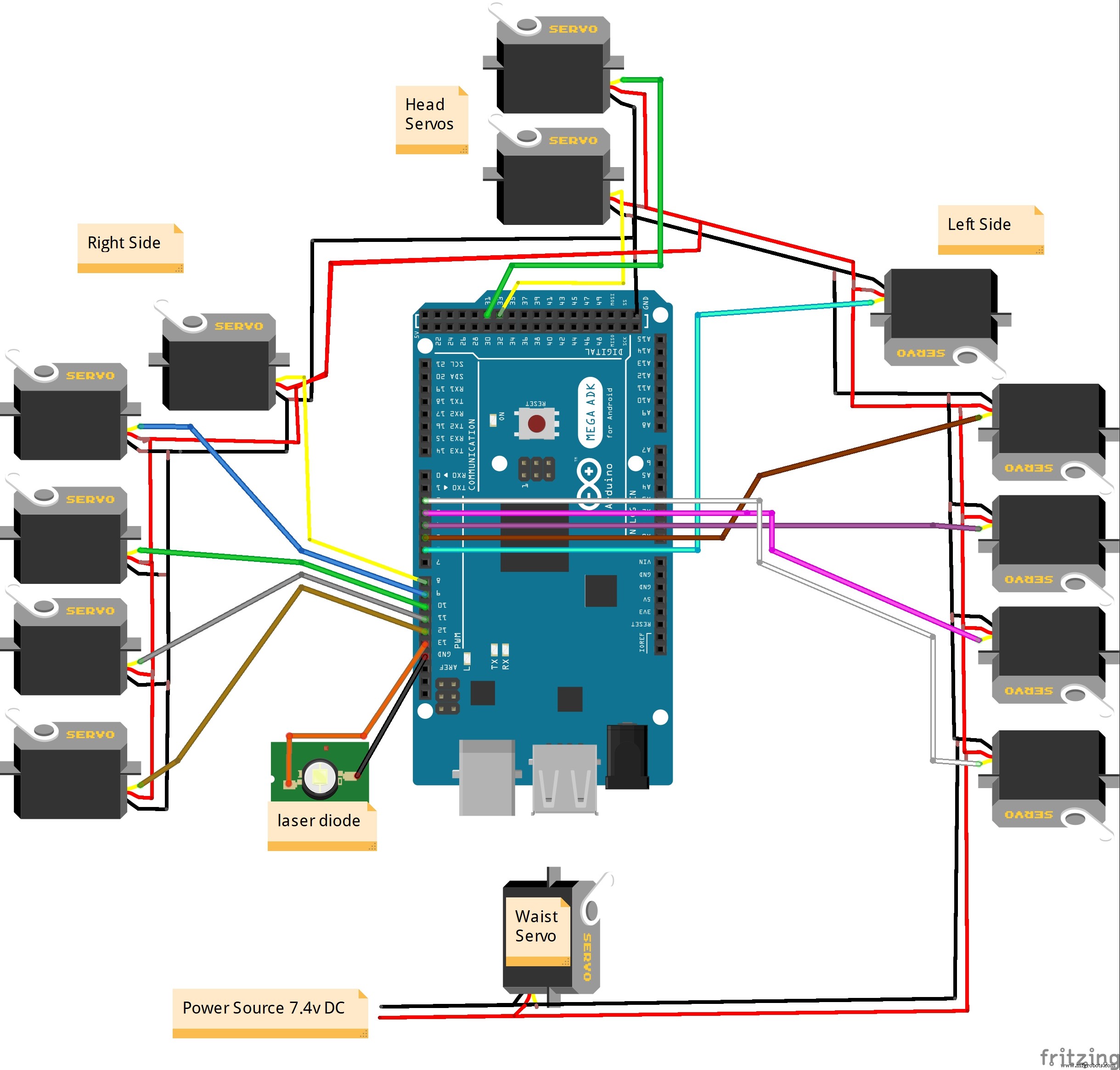
Diagram sirkuit terlihat rumit tetapi sebenarnya tidak. Saya menggambar sirkuit sebagai tata letak motor pada bodi sehingga Anda dapat memahaminya dengan lebih mudah. Pastikan untuk memiliki kesamaan. Arduino mengambil daya dari komputer melalui kabel usb-nya. Ada dioda laser yang memungkinkan mia untuk menargetkan hal-hal yang membutuhkan daya dari pin 13 (pin led) arduino.
Seperti yang Anda lihat bahwa semua motor dan arduino itu sendiri ada di sisi belakang bodi. Saya juga telah meletakkan semua kabel dari belakang. Membeli kabel USB yang diperpanjang agar dapat dihubungkan ke komputer.
Langkah 3:KODE
Seperti yang Anda tahu saya telah menggunakan arduino mega. Arduino mega mengontrol motor Servo, motor sudah diprogram sebelumnya. Dapatkan kode motor dari sini. Harap perhatikan posisi servo default, saat membangun robot, pertahankan ini. Cukup nyalakan motor dengan arduino tanpa membuat bodi dan motor servo akan mencapai posisi default (pos default di bawah)
/*default/standby posisi servos*/
komor.write(4); #waist servo
left1.write(120);
rFinger.write(0);
servo1.write(55);
clawOpen();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90);
Kode kontrol motor lebih dari 750 baris (hati-hati saat mengedit).
Pemrosesan utama dilakukan menggunakan skrip python3.
Python memiliki pustaka pySerial yang berkomunikasi dengan arduino melalui serial. Perhatikan 'COM PORT'.
#Hubungkan dengan papan driver motor mia melalui komunikasi serial
coba:
mia =serial.Serial("COM28", 9600)
kecuali:
pass
Anda juga perlu menginstal pip perpustakaan ini
"""import library yang diperlukan"""
#import request #for membuat post/get request
import pyttsx3 #offline text to speech
import speech_recognition as sr #Speech to teks (memerlukan internet untuk berfungsi)
waktu impor
dari randint impor acak #pustaka pengambilan bilangan bulat acak
import tkinter #tkinter gui library
dari tkinter impor Tk, Tombol, Label, Tk #import hal-hal yang diperlukan
import serial #serial library untuk komunikasi serial melalui USB
dari PIL impor Gambar #ke sana kemari menampilkan gambar
import cv2 #Computer Vision library
import wikipedia #untuk mendapatkan data langsung dari wikipedia
Semuanya mudah menggunakan pip install. Untuk opencv ketik command prompt:
pip install opencv-contrib-python
GUI (Graphical User Interface) yang Anda lihat dikembangkan menggunakan tkinter. Untuk ini dan setiap perpustakaan lainnya Anda dapat menginstal dengan perintah ini:
pip install library_name
maka akan diinstal.
Lihat juga jika Anda menggunakan webcam, kemungkinan besar cam dilambangkan sebagai 1
cap =cv2.VideoCapture(1) #camera
Dan jika Anda ingin tahu lebih banyak tentang bagaimana robot ini sebenarnya berbicara kembali, silakan baca tutorial ini.
Kode MIA-1 hanyalah versi tambahan dari ini.
Saat memerintahkan arduino, komputer mengirimkan sebuah gigitan, arduino melakukan tindakan sesuai dengan gigitan yang diterimanya, sehingga terlihat gerakan dan pembicaraan Mia tidak sinkron.
mia.write(b'p') #perintah ke atas lalu ke bawah
count_down(3)
respond("Smile please", 100)
Sekarang untuk mendapatkan kodenya, buka tautan di bawah ini.
Unduh kode MIA-1 dari sini.
Langkah 4:Kekuatan dan Penyelesaian
Saya telah memberi daya pada robot menggunakan baterai lipo 7,4 v. Servo LDX227 sangat haus daya (tetapi berkualitas baik) jadi pastikan mereka mendapatkan setidaknya 7,3 v kapan saja. Di sisi lain motor servo MG996r yang murah dapat dengan mudah rusak, pastikan tidak lebih dari 7.8V. Jadi catu daya tertinggi untuk robot ini harus berada di antara 7,4 hingga 7,8 volt.
Selamat membuat! Jika Anda menyukai robot ini, pastikan untuk mendukung dengan berlangganan saluran untuk proyek yang lebih menakjubkan.
Kode
Unduh kode lengkap secara gratis
ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robothttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot Skema
Sirkuit MIA-1
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot