

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
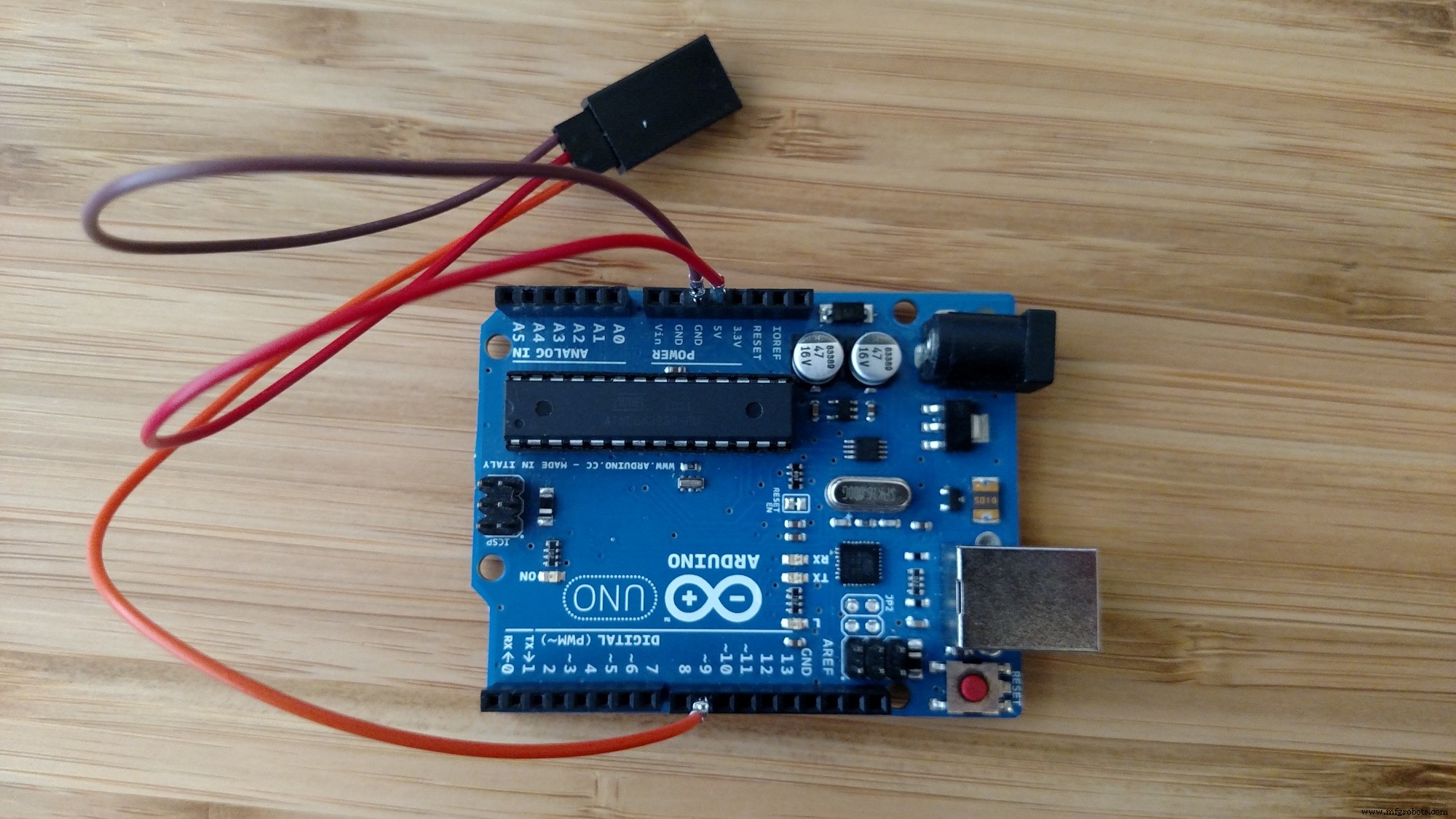
Solo memiliki lingkungan pengembangan yang bagus tetapi kekurangan I/O. Saat ini port Aksesori rusak CAN, Mavlink Serial to Pixhawk, dan USB to Sololink (imx6). Dengan menggunakan arduino dan firmata dapat menambahkan sensor kustom, servo kontrol, LED berkedip, atau fungsi arduino lainnya.
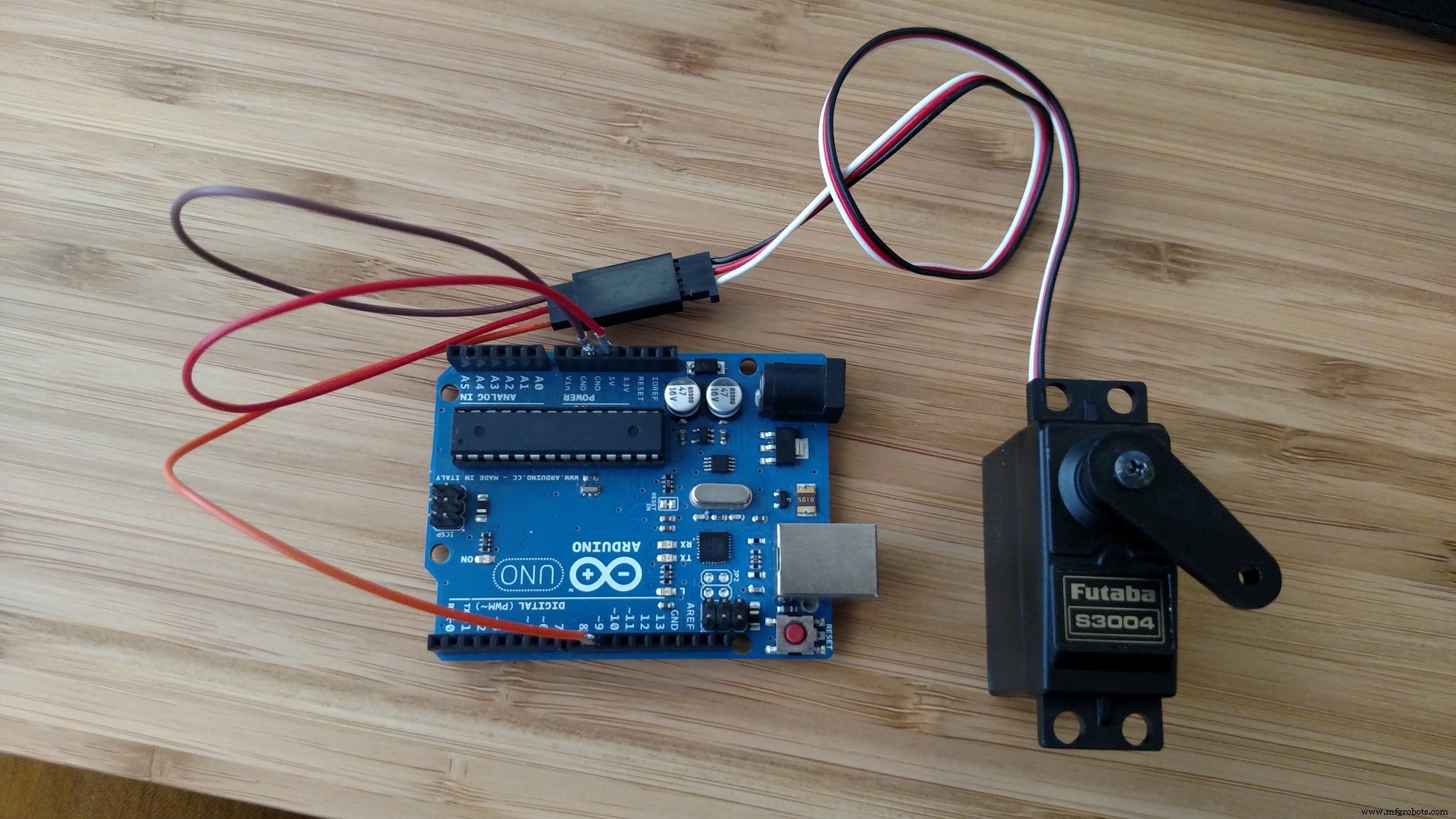
Tutorial ini akan memandu Anda melalui langkah-langkah menggunakan arduino dengan Solo untuk mengontrol servo.
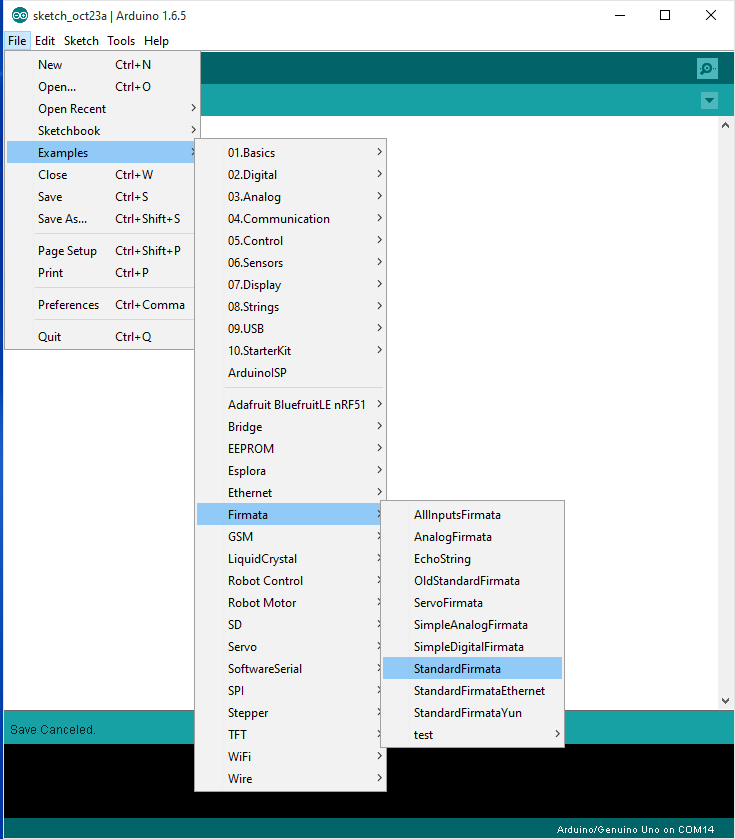
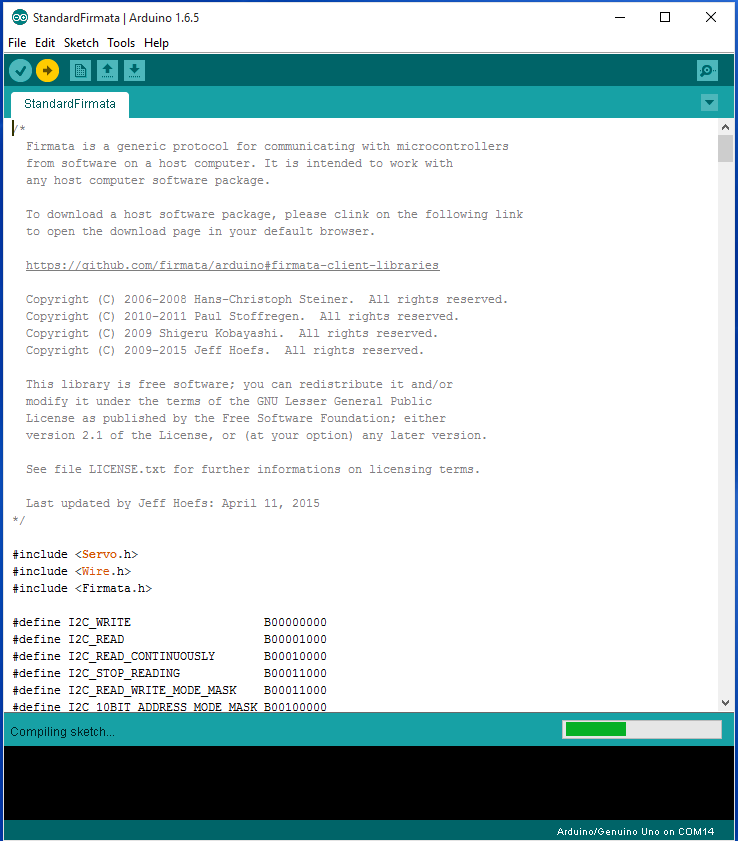
Buka StandardFirmata dari tab contoh. Pilih papan dan port. Unggah!



Catatan:Papan breakout tidak dijual pada saat ini. Silakan lihat di sini




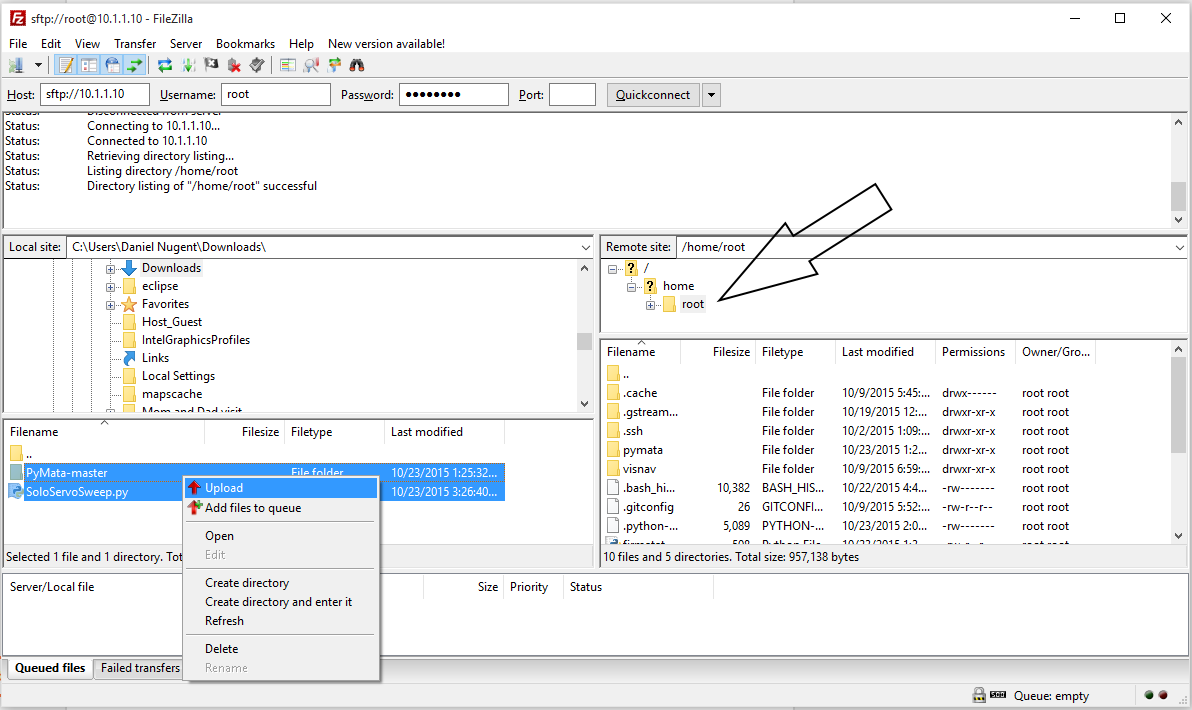
pyMata
SoloServoSweep.py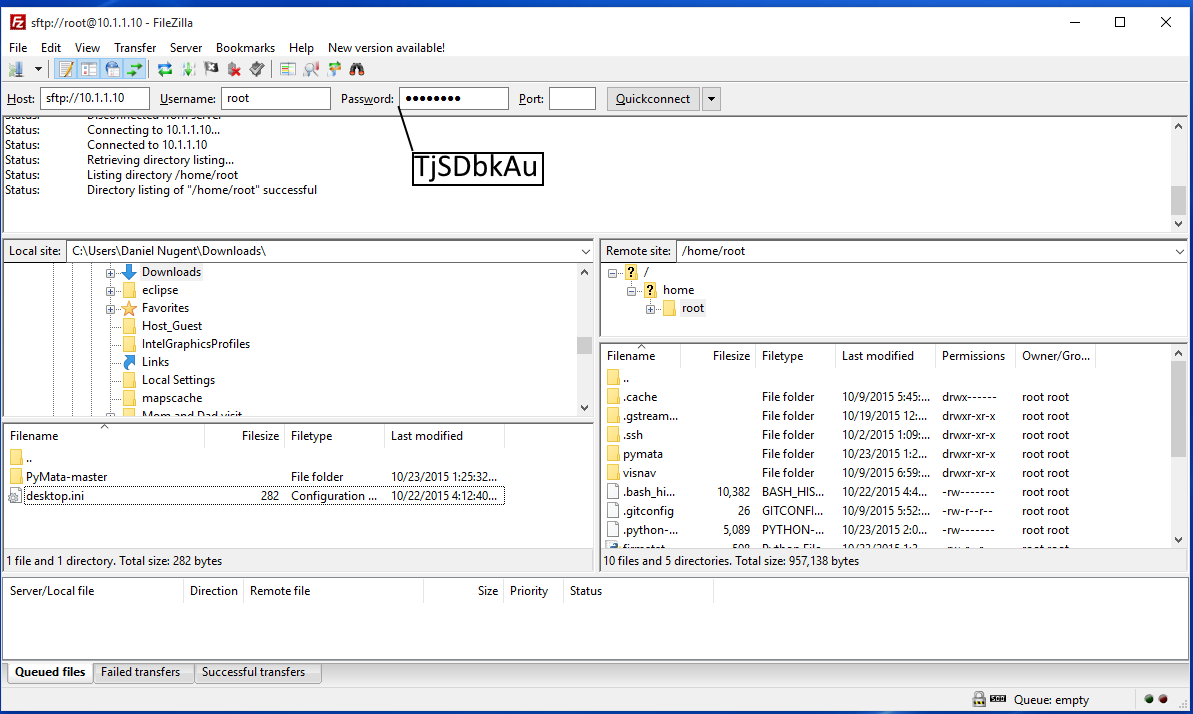
SSH ke Solo menggunakan klien SSH OS Anda. Untuk Windows kami akan menggunakan Putty.
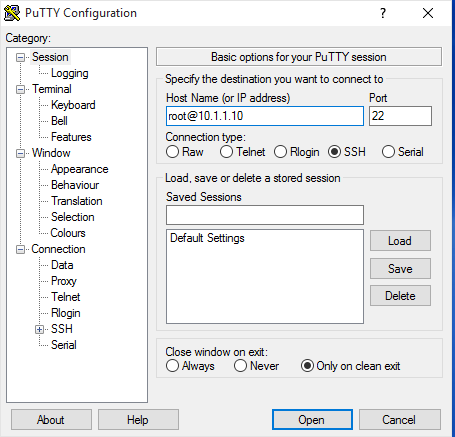
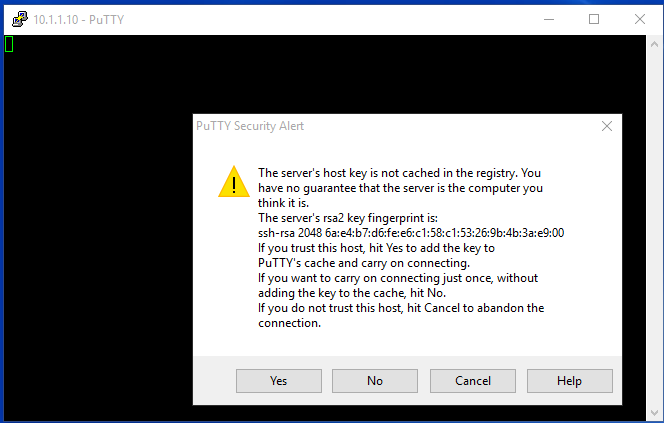
Pastikan Anda masih terhubung dengan Wifi Solo!
Lihat keterangan foto untuk lebih jelasnya
Jalankan perintah ini di sesi SSH Anda:
Ini harus menjadi hasil Anda
Saat sesi ssh Anda masih terbuka, jalankan:
dari PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # servo terpasang ke pin iniEND =170 # Max servo travel# create a PyMata instanceboard =PyMata("/dev/ttyACM0")# konfigurasikan pin sebagai servoboard.servo_config(SERVO_MOTOR)try:while True:for i in range (0,END):# sweep up board.analog_write(SERVO_MOTOR, i) time.sleep(.015) for i in range (END,0,- 1):# menyapu board.analog_write(SERVO_MOTOR, i) time.sleep(.015)kecuali KeyboardInterrupt:board.close() sys.exit() 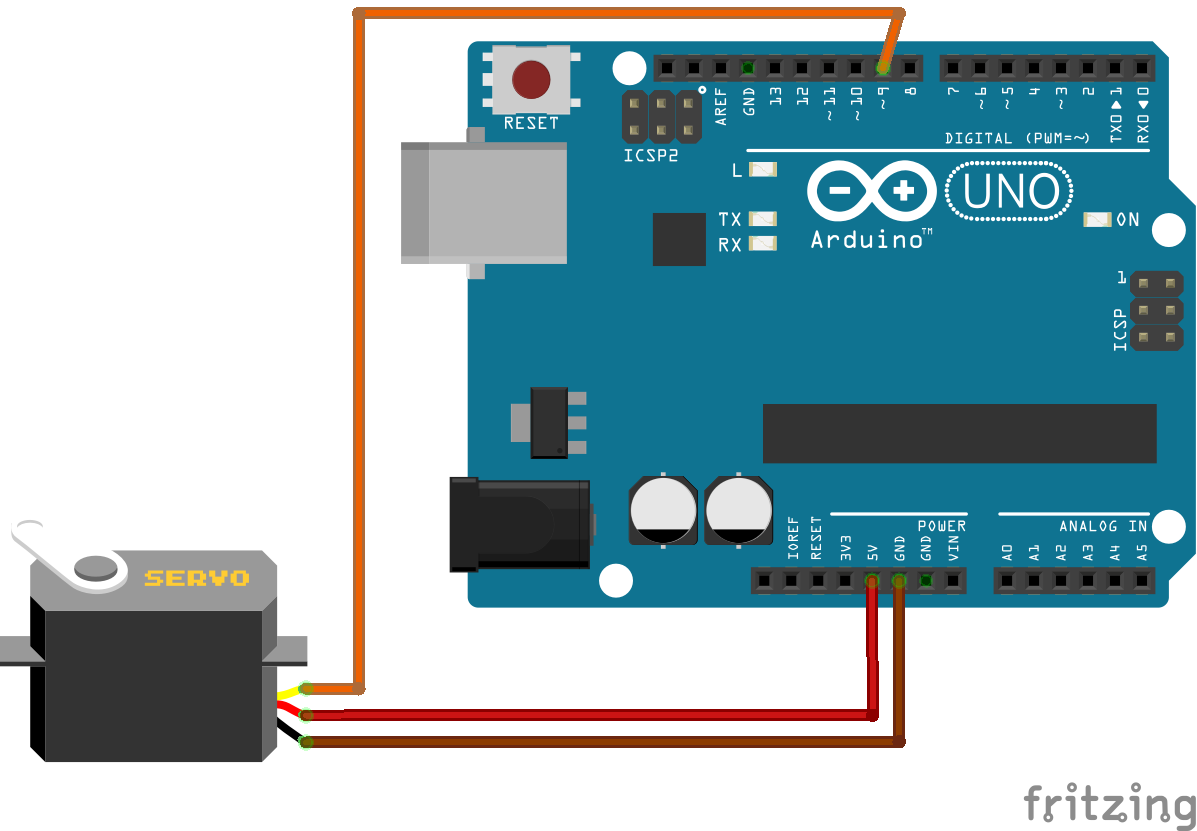
Proses manufaktur
Dalam tutorial ini kita akan mempelajari cara kerja motor servo dan cara mengontrol motor servo dengan Arduino . Motor servo sangat populer dan banyak digunakan di banyak proyek Arduino karena mudah digunakan dan memberikan kontrol posisi yang bagus. Servo adalah pilihan tepat untuk proyek robotika
Dalam tutorial ini kita akan belajar bagaimana membangun Arduino Gimbal atau platform self-stabilizing dengan motor servo. Tutorial ini sebenarnya merupakan lanjutan dari tutorial sebelumnya tentang tutorial MPU6050. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini. Ri
Dalam artikel ini saya akan menunjukkan kepada Anda bagaimana Anda dapat membuat Penyortir Warna Arduino. Anda dapat menonton video berikut atau membaca artikel tertulis di bawah ini. Desain Yang kita butuhkan untuk proyek Arduino ini adalah satu sensor warna (TCS3200) dan dua motor servo penghobi
Dalam Tutorial Arduino ini, saya akan menunjukkan kepada Anda bagaimana Anda dapat membuat radar yang tampak keren ini menggunakan Papan Arduino dan Lingkungan Pengembangan Pemrosesan. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini untuk lebih jelasnya. Ringkasan Yan