Tentang proyek ini
Pendahuluan
Tutorial ini mendemonstrasikan cara membuat robot pick and place yang dikendalikan dengan smartphone Android Anda. Kami telah membangun aplikasi seluler menggunakan platform MIT App Inventor. Dalam tutorial ini, kita akan membicarakan setiap bagian dari proyek ini secara terpisah. Kita akan berbicara tentang:
- 1 Cara Mengontrol Motor Servo
- 2 Cara Mengontrol Motor DC
- 3 Cara Menggunakan Modul Bluetooth
- 4 Cara Mengontrol Robot dengan Ponsel Anda
Jadi saya harap tutorial ini mencakup semua kebutuhan Anda untuk membuat bot.
Skenario
Pertama-tama, kita harus tahu bagaimana robot akan menerima perintah. Kami menggunakan modul Bluetooth yang akan terhubung ke aplikasi seluler, yang akan kami bangun setelahnya. Untuk saat ini kami perlu mengetahui bahwa kami akan mengirimkan perintah kami ke robot dengan ponsel kami menggunakan koneksi Bluetooth.

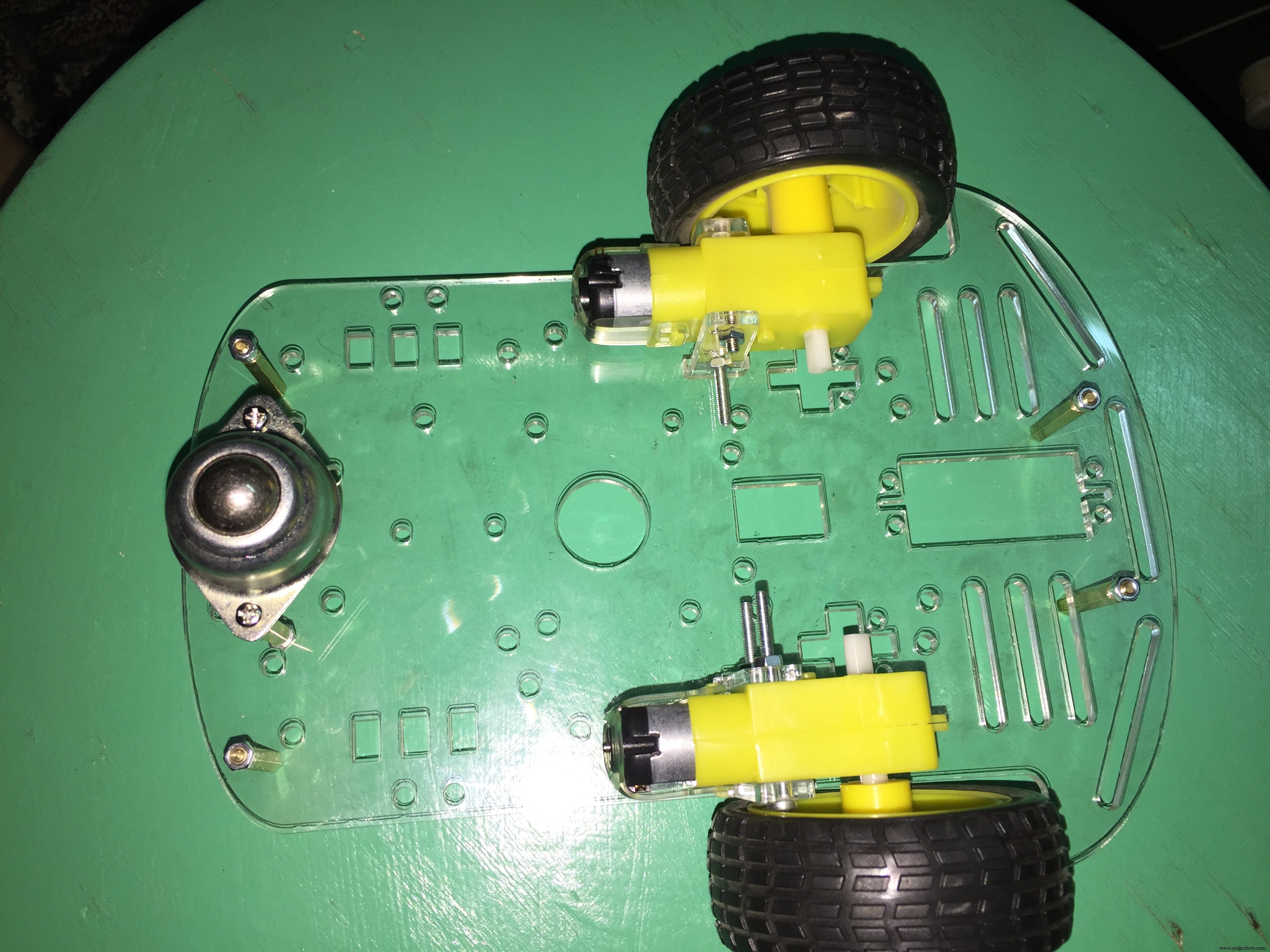
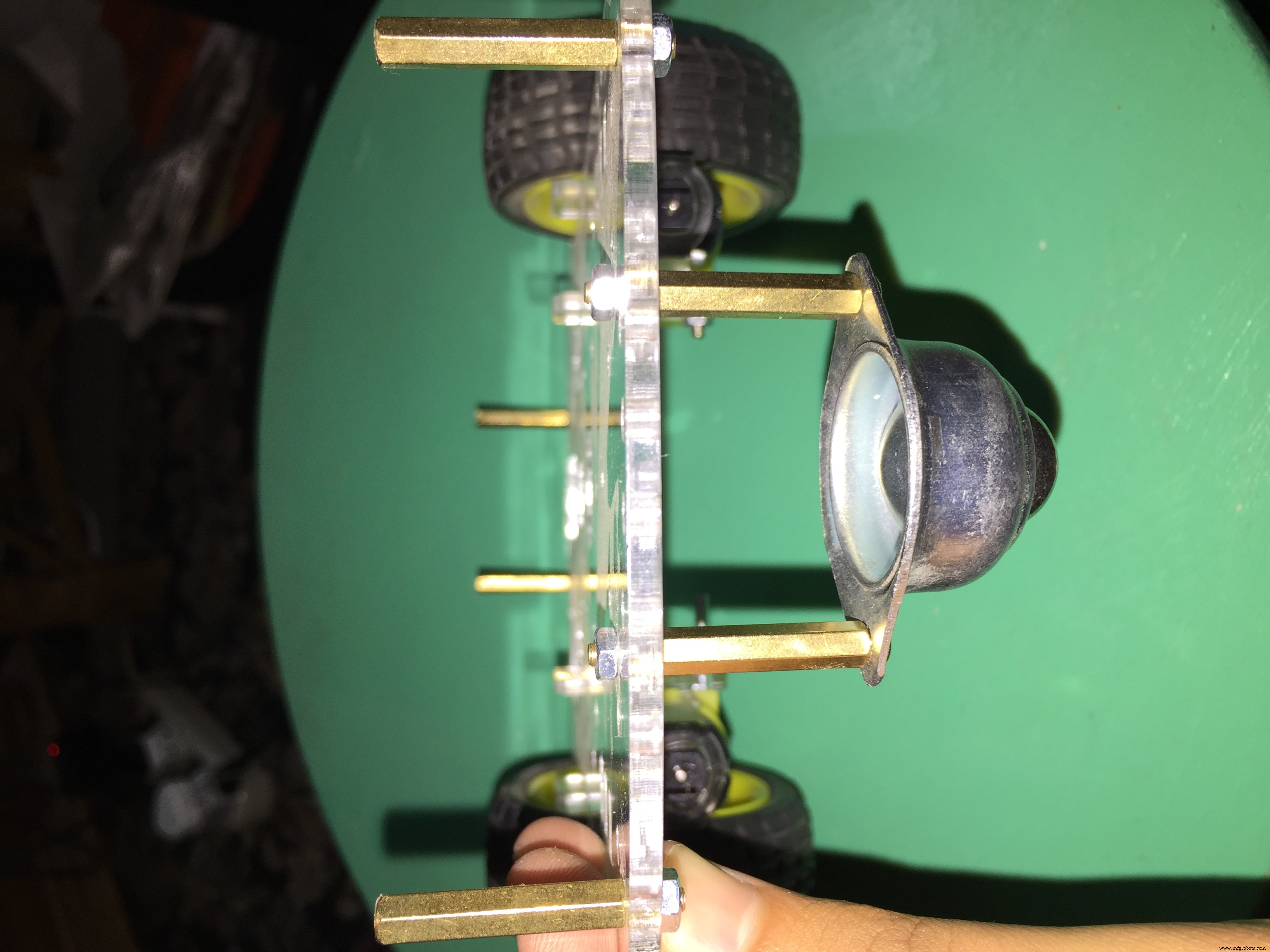
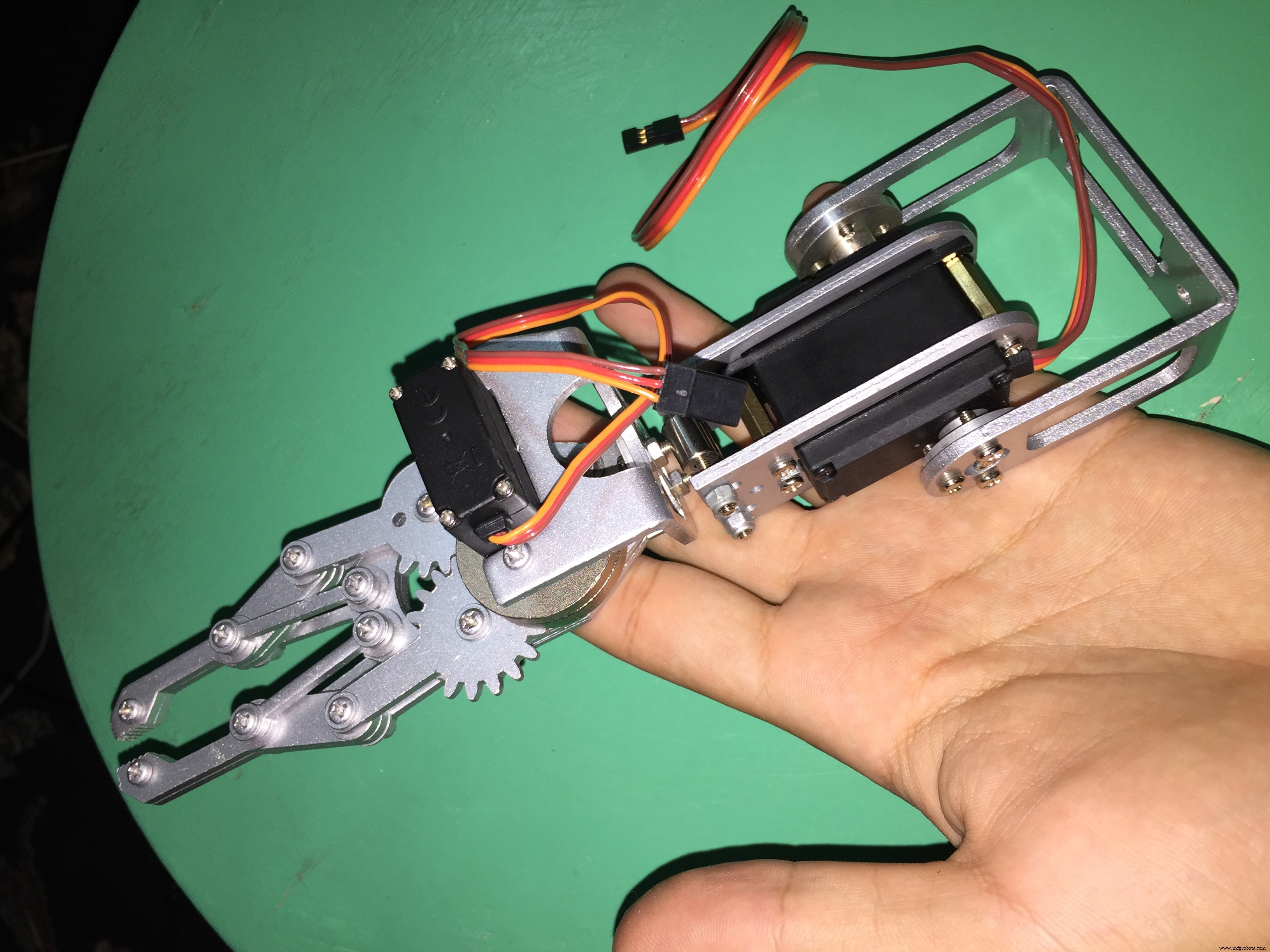
Perangkat Keras - Perlengkapan ini memerlukan beberapa perakitan sederhana, tetapi membutuhkan waktu. Ikuti petunjuk yang disertakan dengan kit Anda untuk perakitan,
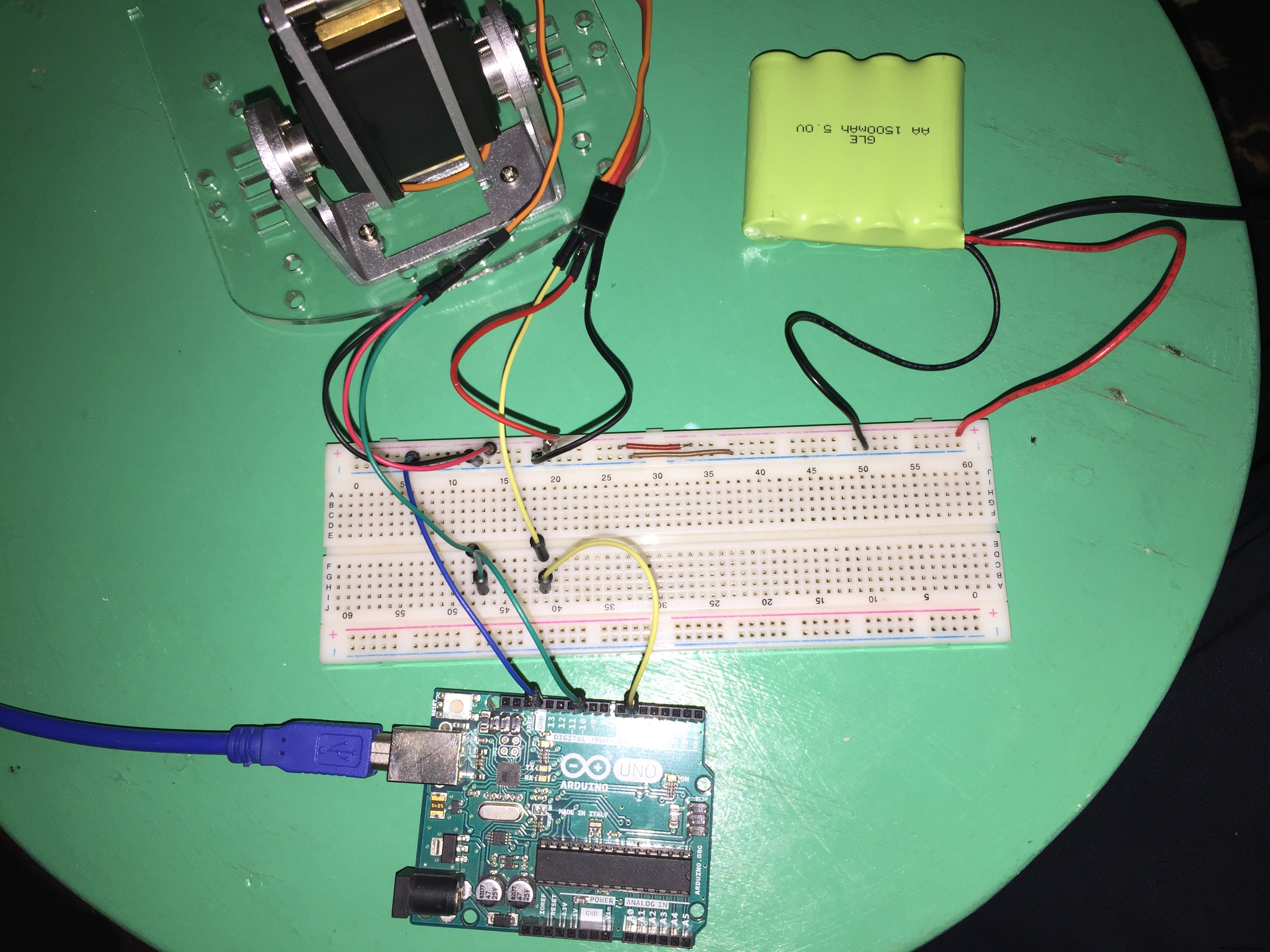
Di akhir perakitan akan terlihat seperti ini:
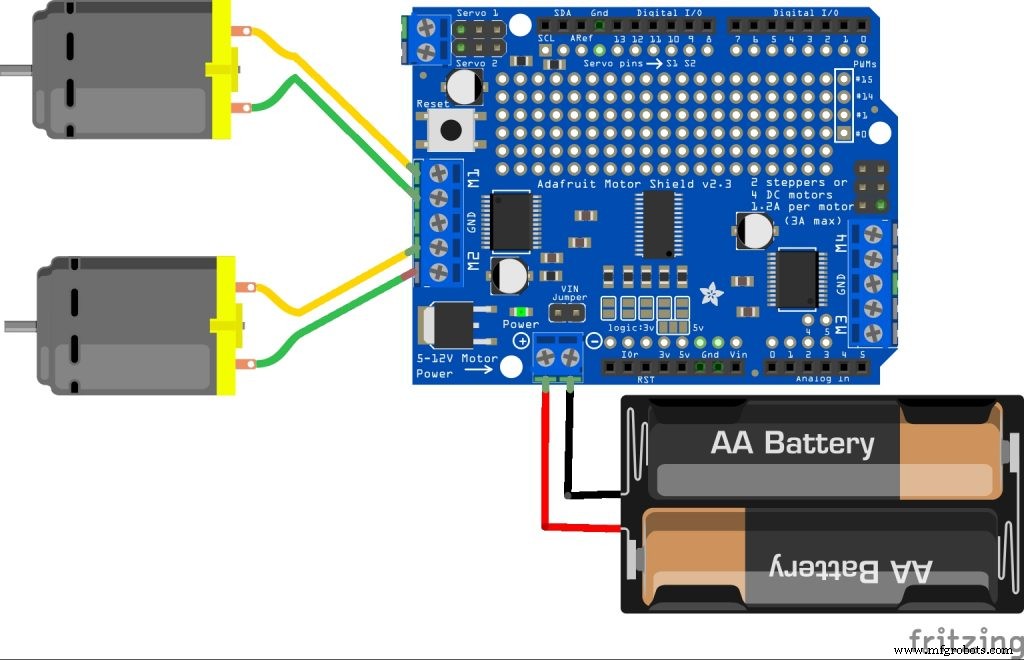
Motor Shield memungkinkan Anda untuk berbicara dengan motor Anda. Jika Anda menghubungkan motor langsung ke papan Arduino, itu akan memicu api! karena setiap motor membutuhkan setidaknya 80MA tetapi arus maksimum yang dapat disediakan oleh pin Arduino digital adalah 40MA, jadi JANGAN coba sambungkan motor langsung ke papan Arduino Anda.
- Pelindung motor membantu Anda untuk mengontrol arah motor Anda (misalnya bergerak MAJU, Mundur, dan RELEASE).
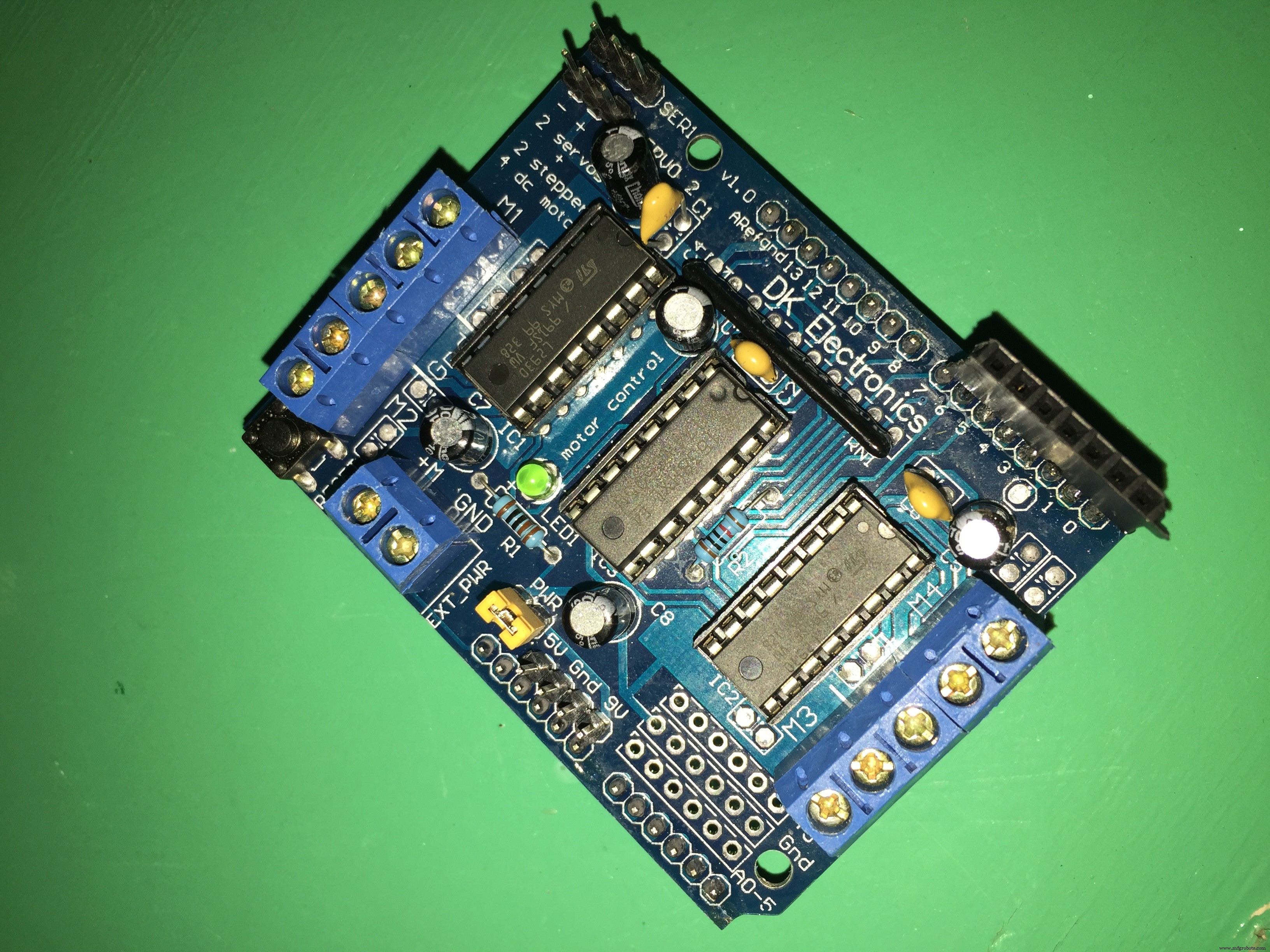
- Pelindung motor memungkinkan Anda mengontrol hingga 4 DC dua arah motor dengan pilihan kecepatan 8-bit individual (jadi, resolusi sekitar 0,5%).
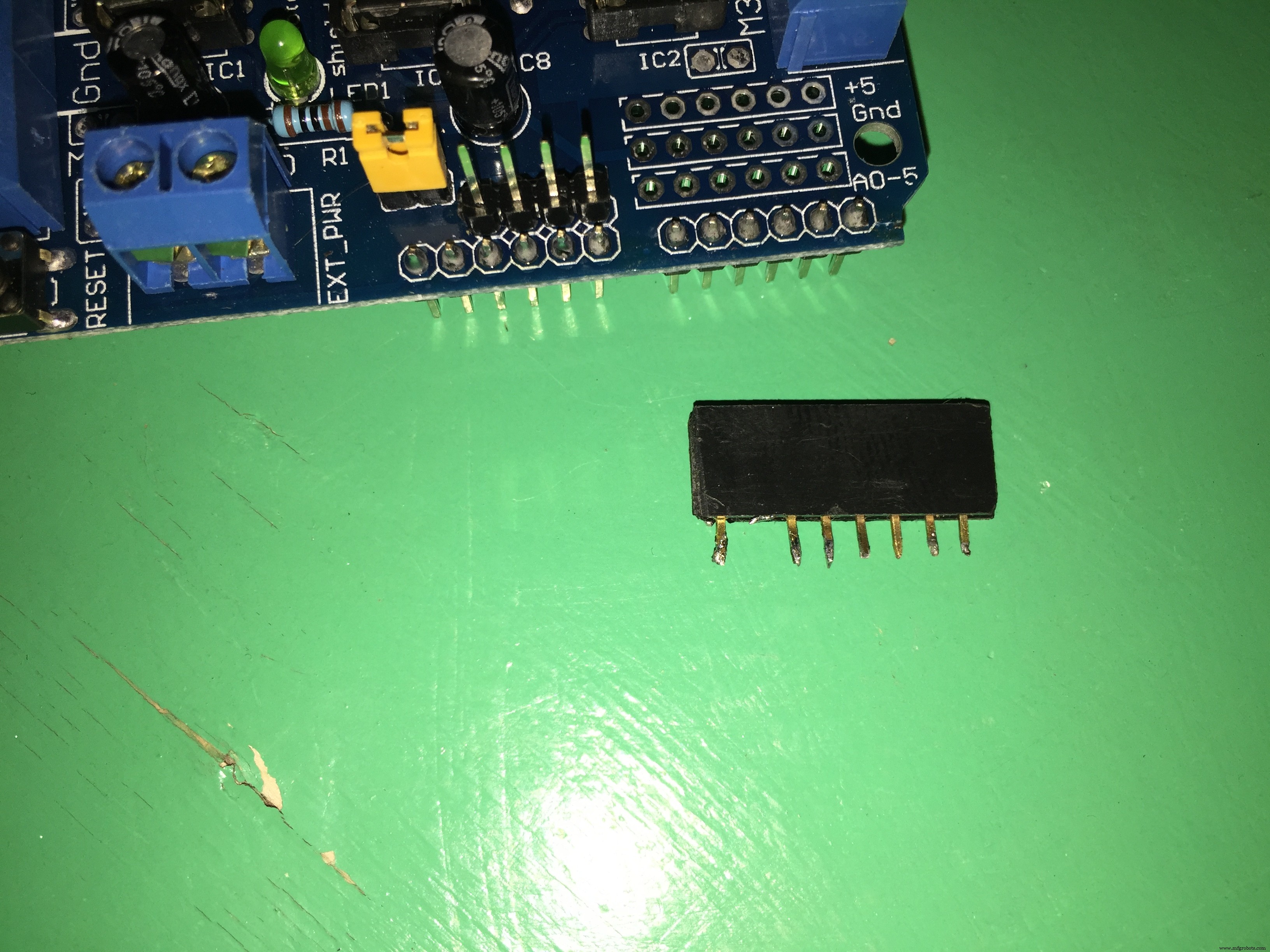
Anda dapat menyolder beberapa pin header di bagian atas pelindung untuk dapat menggunakan pin Arduino.

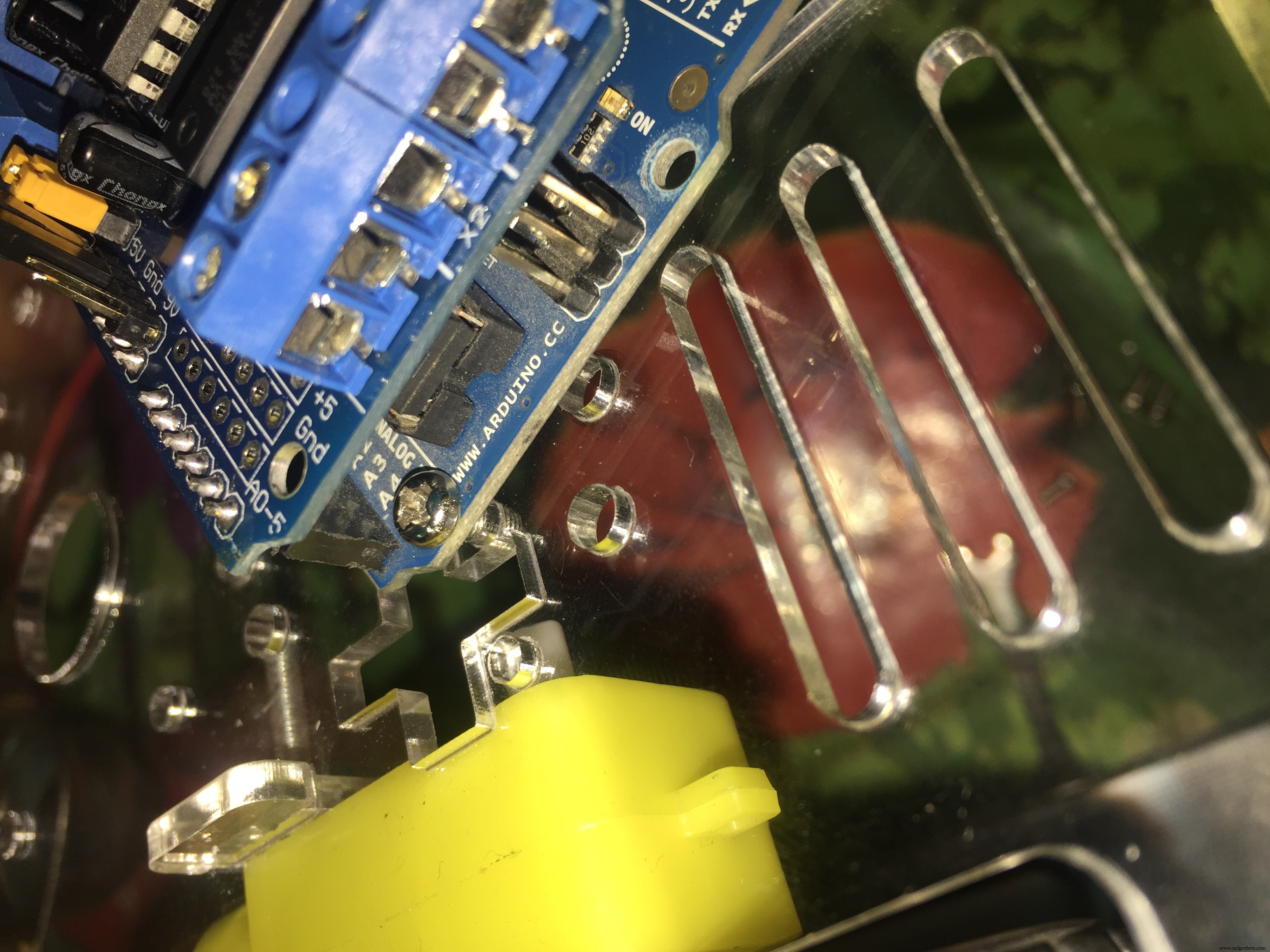
Anda perlu menempelkan pelindung motor Anda di atas papan Arduino Anda seperti ini:
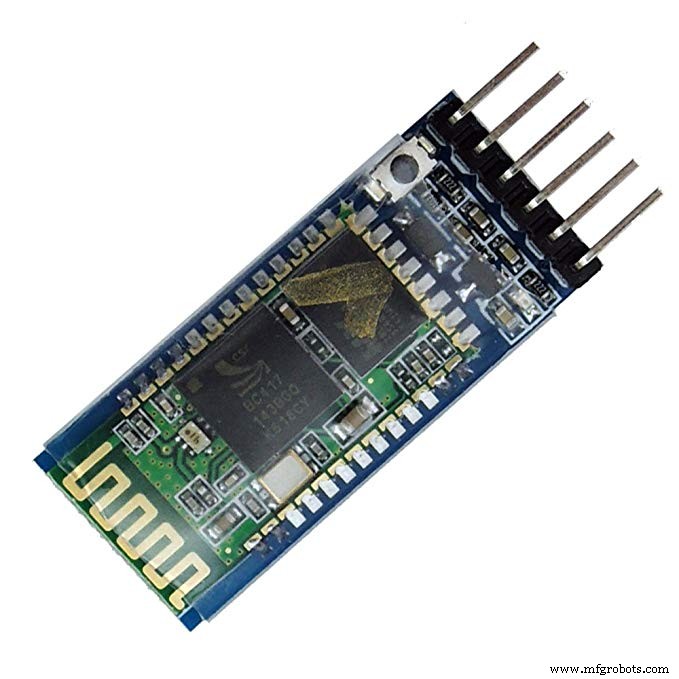
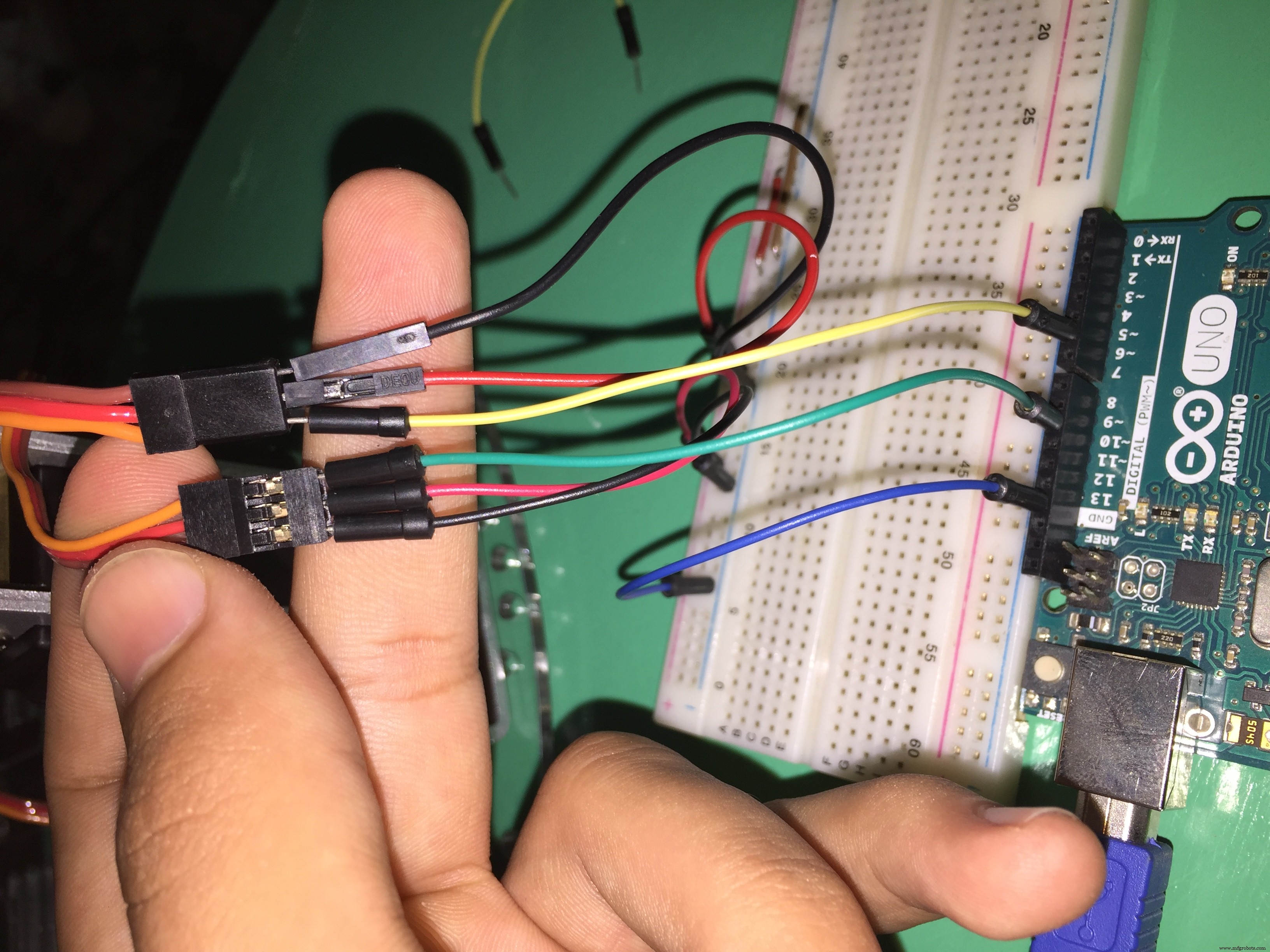
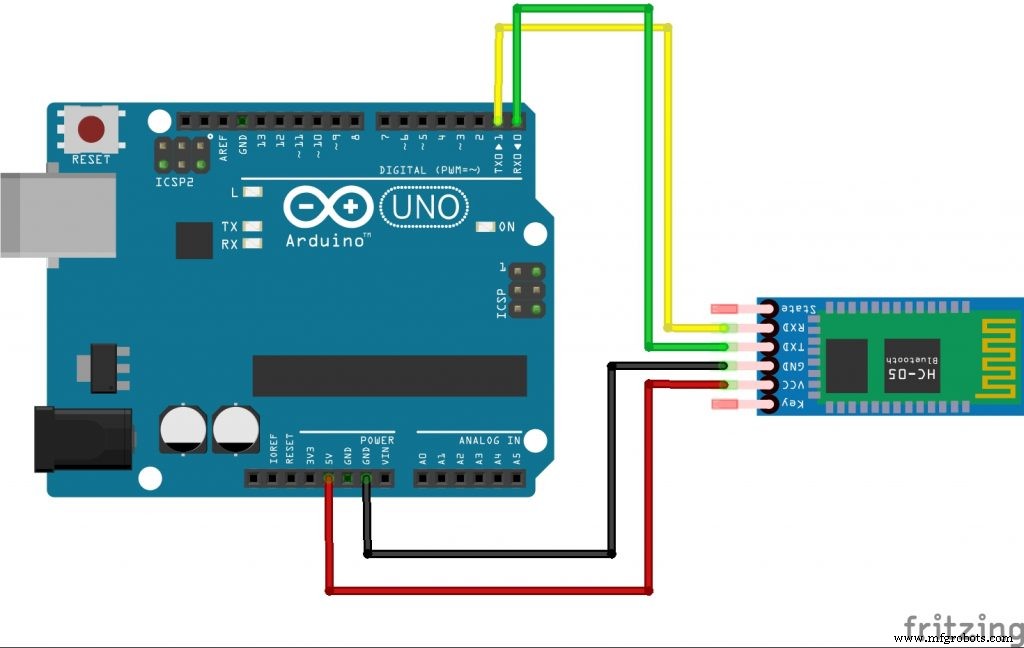
Modul Bluetooth :saluran antara pilot dan robot untuk mengirim perintah dan mengambil tindakan.
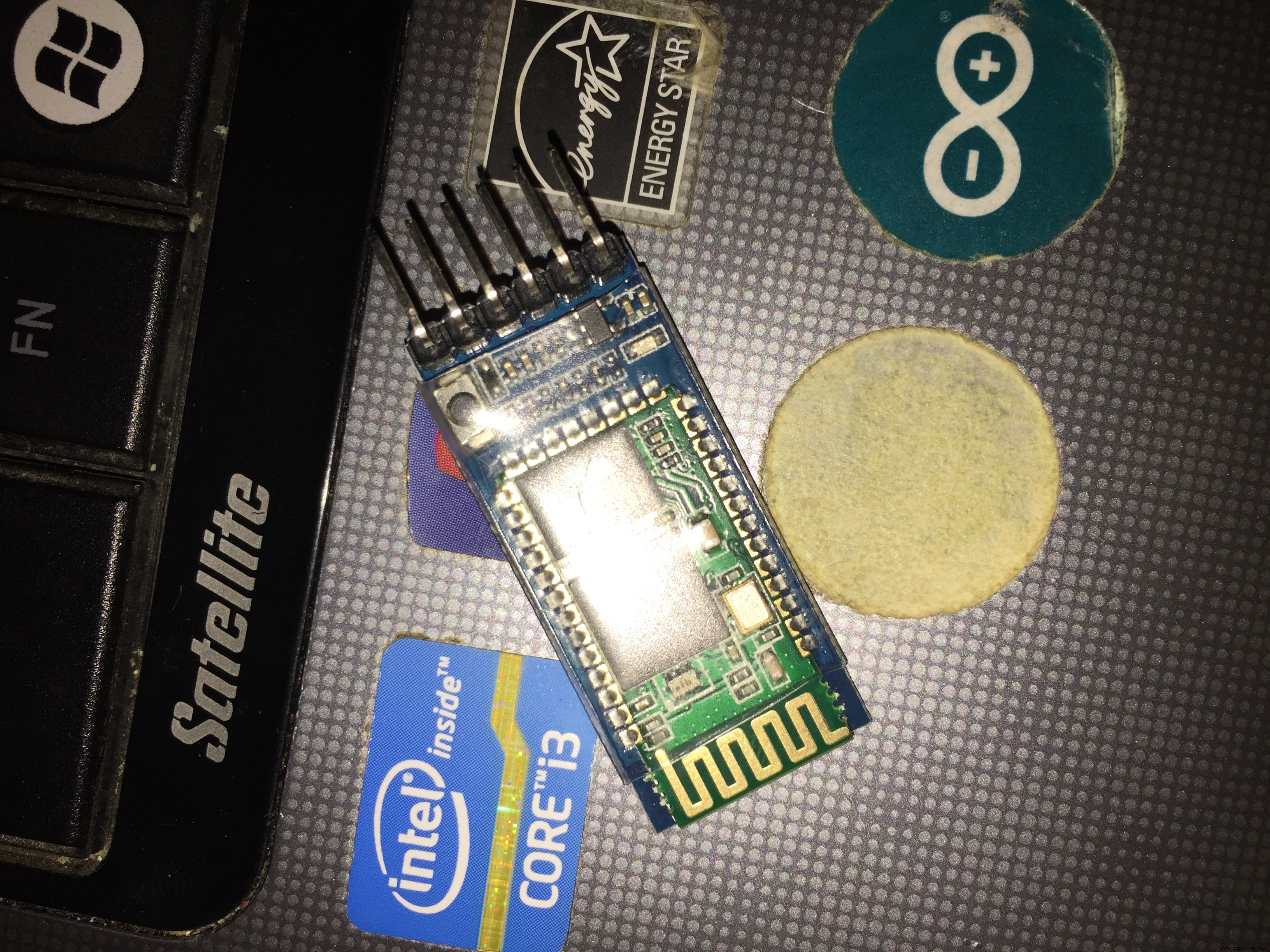
Ini memiliki 6 pin; kita hanya akan menggunakan empat pin tengah (RX-TX-GND-+5):

Kami akan menghubungkan:
- +5 pada modul Bluetooth ke 5v pada Arduino
- GND pada modul Bluetooth ke GND pada Arduino
- Rx pada modul Bluetooth ke Tx pada Arduino
- Tx pada modul Bluetooth ke Rx pada Arduino

CATATAN:MENGAPA Rx ke Tx dan Tx ke Rx?
Karena modul Bluetooth mengirimkan data (Tx) dan Arduino menerima Data (Rx).
Yang Satu Mengirim Dan Yang Lain Menerima
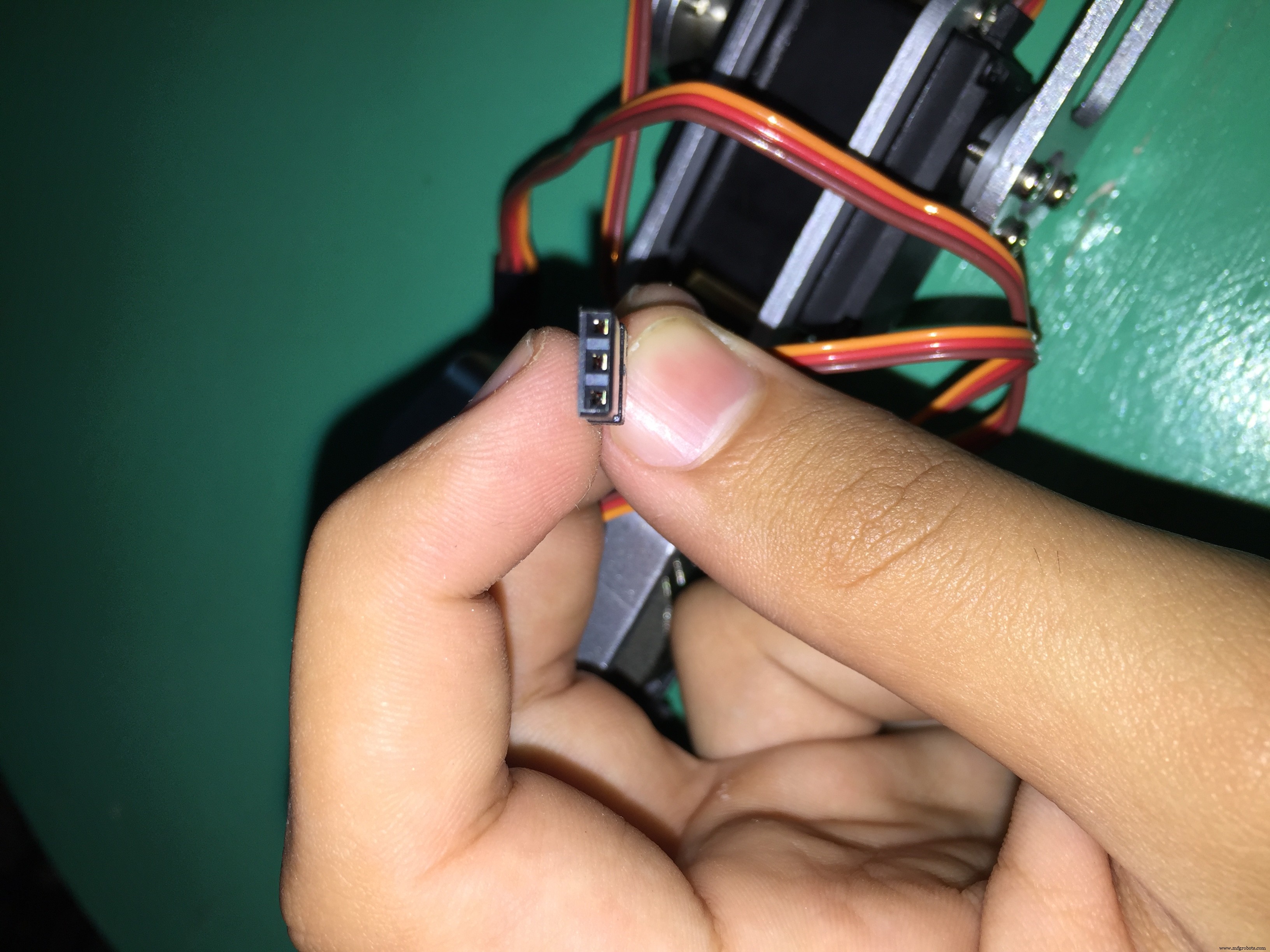
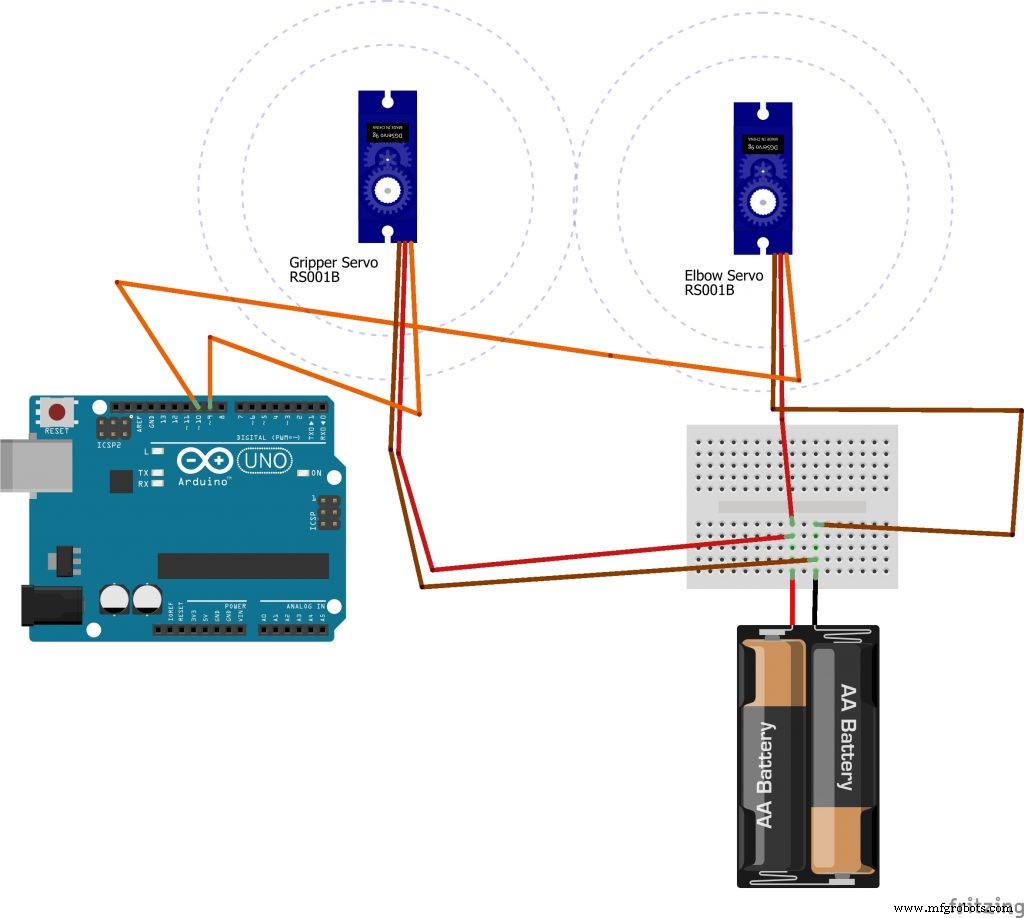
4) Motor Servo memiliki 3 kabel:merah (Positif), coklat (Negatif), kuning atau oranye (Sinyal).
Catatan:LAKUKAN JANGAN menghubungkan Positif dan Negatif Motor Servo ke 5V dan GND papan Arduino. Papan Arduino akan menyalakan api karena arus tinggi yang diserap oleh motor; gunakan yang baterai eksternal.
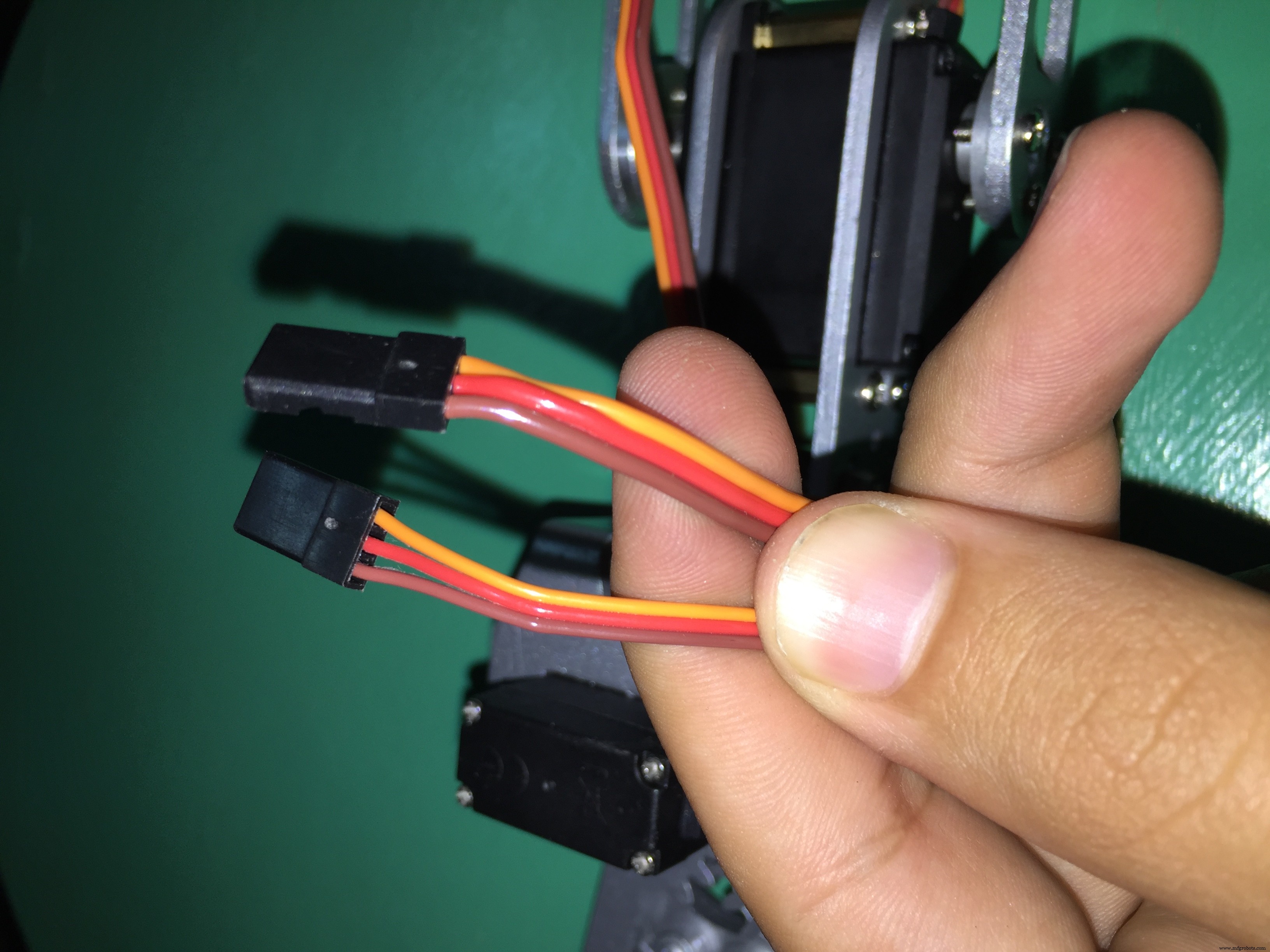
- Kabel Merah ke Positif baterai eksternal
- Kabel Coklat ke Negatif baterai eksternal
- Kabel Oranye ke pin digital (PWN) apa pun di Arduino
CATATAN:Jangan lupa untuk membuat GND baterai dan GND Arduino menjadi sama, buatlah dengan menghubungkan masing-masing GND satu sama lain.
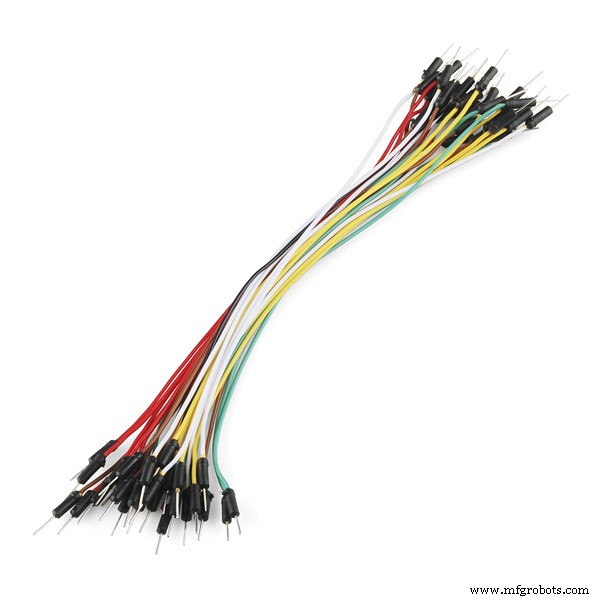
5) Motor DC
Anda perlu menyolder beberapa kabel di Terminal Motor untuk dapat menggunakan motor ini.
Motor DC tidak memiliki polaritas. Tidak ada Positif dan tidak ada Negatif. Jika Anda membalikkan sambungan motor, arah gerakan motor akan berubah.

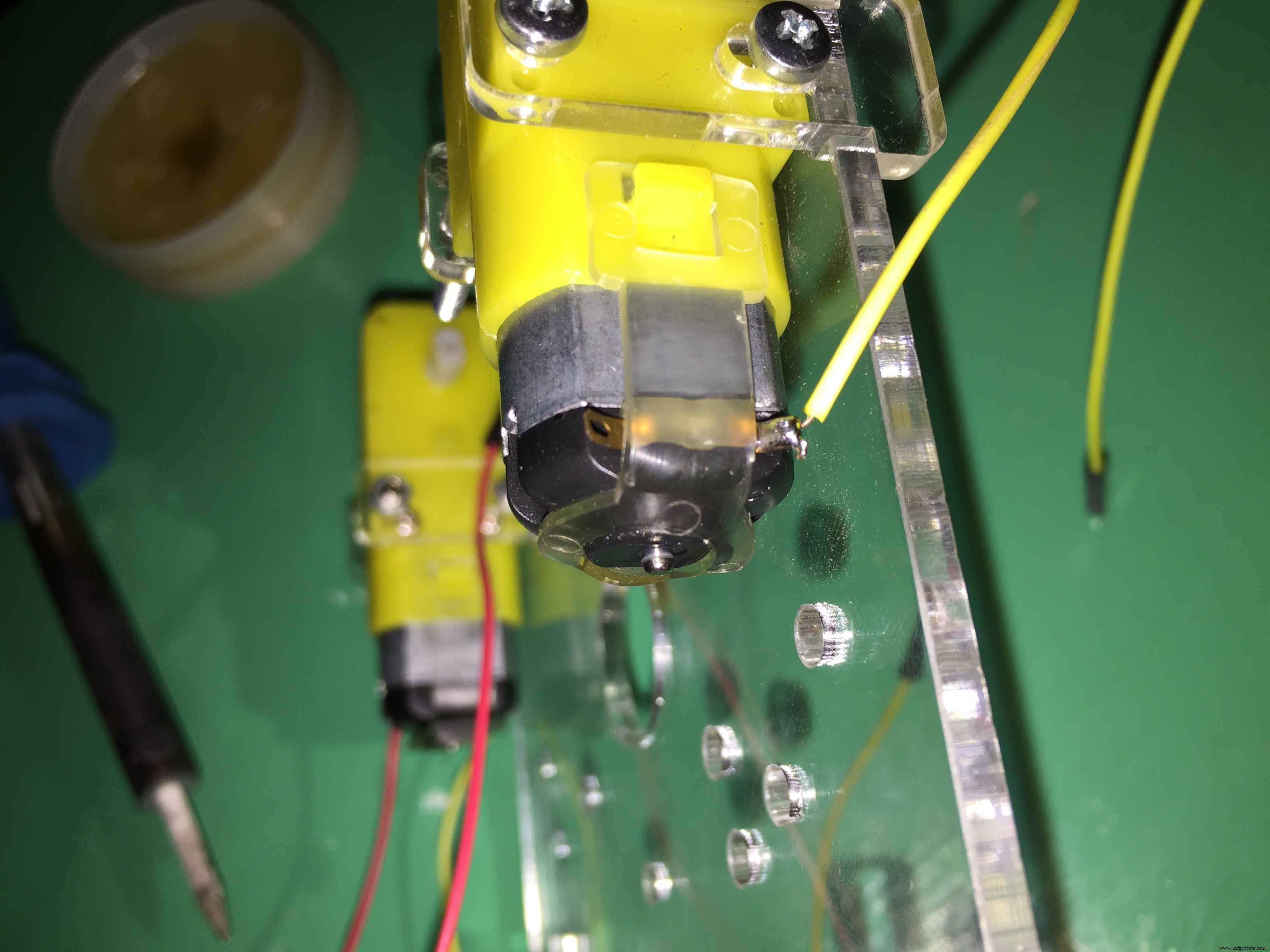
Setelah Anda menyolder Terminal Motor, sambungkan terminal ini ke Motor Shield.

CATATAN:Dalam tkode Arduino, saya Motor 1 dan Motor 2 bekas - bukan Motor 3 dan Motor 4.
Skema
Cara Menghubungkan Motor Robot dan baterai dengan driver motor.
Cara Menghubungkan Motor servo Arm dan baterai dengan board Arduino.
Cara Menghubungkan modul bluetooth dengan board Arduino.
CATATAN:lepaskan (lepaskan KAWAT MERAH +5 pin) modul bluetooth saat mengunggah kode ke papan Arduino. Kemudian sambungkan kembali setelah proses upload selesai.
Kode
- Pilih Dan Tempatkan Kode Robot Arduino
Pilih Dan Tempatkan Kode Robot ArduinoArduino
#include#includeAF_DCMotor motorR(1);AF_DCMotor motorL(2);Servo elbowServo;Servo gripperServo;int command;void setup() {gripperServo.attach(9); elbowServo.attach(10);Serial.begin(9600);motorR.setSpeed(255);motorL.setSpeed(255);}void loop() {command =Serial.read(); /* ARM Code */if(command>=1 &&command <=180) //elbow servo bergerak sesuai dengan posisi ibu jari pada aplikasi mob antara 0 -- 180 .{ elbowServo.write(command);}else if ( command ==205) //Gripper Pindah Ke Sudut 0{ gripperServo.write(0);}else if (perintah ==206) //Gripper pindah ke sudut 90{ gripperServo.write(90); }else if (perintah ==207) //gripper pindah ke sudut 180{ gripperServo.write(180);} /* KODE MOBIL */ else if (perintah ==200){ motorR.run(FORWARD); motorL.run(FORWARD);}else if(command ==201){ motorR.run(FORWARD); motorL.run(Mundur); }else if(perintah ==202){ motorR.run(LEPAS); motorL.run(LEPAS); }else if(perintah ==203){ motorR.run(BACKWARD); motorL.run(FOWARD); }else if(perintah ==204){ motorR.run(BACKWARD); motorL.run(Mundur); }else if(perintah ==0){ motorR.run(LEPAS); motorL.run(LEPAS); }}
Skema
Aplikasi Ini Hanya Berjalan Di Ponsel Android.
Anda Harus Mengaktifkan Bluetooth Sebelum menggunakan aplikasi ini
sebelum Anda memilih modul Bluetooth dari aplikasi, pasangkan ponsel Anda dengan modul Bluetooth dari pengaturan di ponsel Anda ieee_aast_aswan_test1_xVVlPTtt8n.apk