

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 4 |
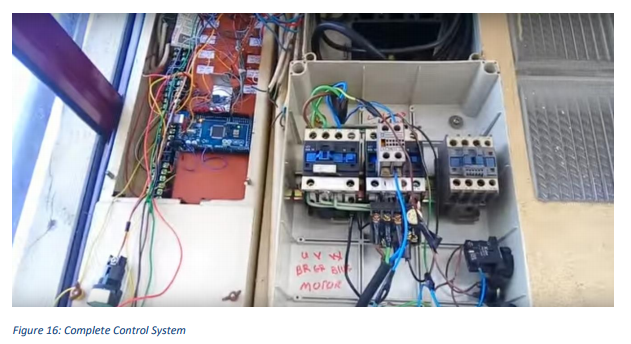
Rancang dan uji sistem kontrol untuk lift servis yang beroperasi untuk empat lantai. Mikrokontroler (ATMega2560) digunakan untuk menentukan kontaktor mana yang memberikan daya untuk mengaktifkan motor lift untuk menggerakkan lift ke atas atau ke bawah dengan memeriksa lantai lift saat ini. Sistem kontrol juga harus dapat menghentikan daya ke lift ketika telah mencapai lantai yang dibutuhkan. Faktor keamanan integral harus diterapkan untuk selalu menutup pintu lift sebelum bergerak naik atau turun. Sistem kontrol berhasil menentukan kontaktor mana yang perlu diberi daya untuk memindahkan lift ke lantai yang diinginkan. Sistem ini mampu mengendalikan motor pintu pengaman lift untuk menutup pintu saat lift perlu bergerak dan membuka pintu secara otomatis saat sudah mencapai lantai yang diinginkan.
Video Demo:
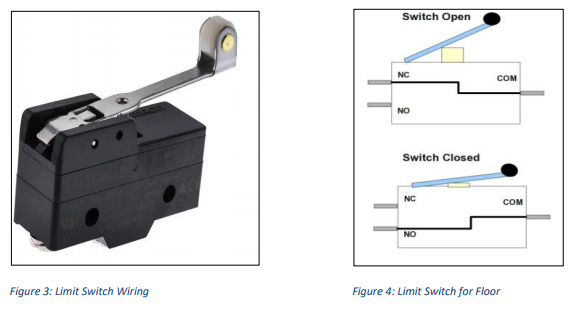
1.1 Pengkabelan motor 3 Fasa
Motor 3 fasa digunakan dalam aplikasi ini karena ini membutuhkan motor yang kuat yang dapat menangani beban berat. Motor 3 fasa ditenagai melalui daya 3 fasa utama. Daya melalui saluran utama melalui dua kontaktor utama. Ketika kontaktor pertama dihidupkan dan kontaktor kedua dimatikan, daya mengalir melalui kontaktor pertama ke belitan motor yang menggerakkan motor ke arah depan.
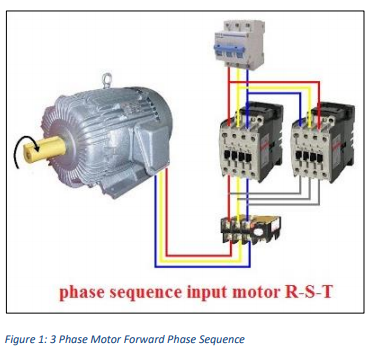
Ketika kontaktor kedua dihidupkan dan kontaktor pertama dimatikan, daya mengalir melalui kontaktor kedua ke belitan motor yang menggerakkan motor ke arah belakang. Perhatikan bahwa pengkabelan berbeda untuk arah sebaliknya.
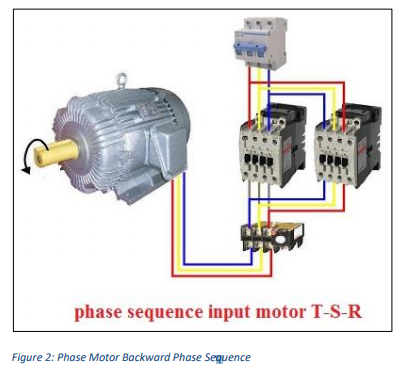
1.2 Deteksi lantai
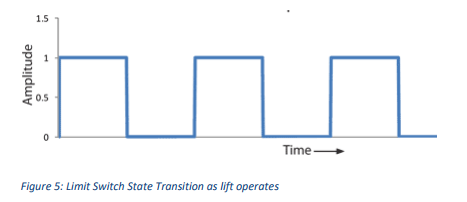
Untuk mendeteksi lantai lift saat ini, sakelar batas digunakan. Saat lift bergerak naik atau turun, lift akan menutup dan membuka sakelar batas di setiap lantai. Ketika lift berada di lantai tertentu, batas lantai di lantai tersebut ditutup yang menunjukkan kepada mikrokontroler lantai lift berada. Saat lift bergerak, sakelar batas terbuka yang menunjukkan ke mikrokontroler bahwa lift bergerak.
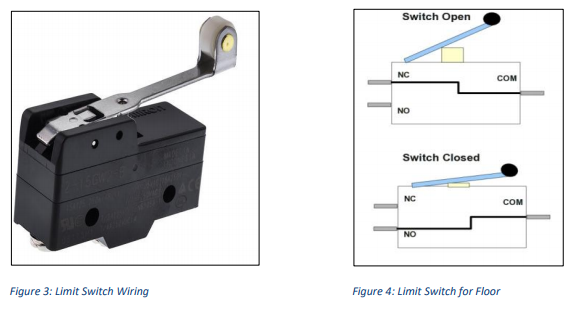
Transisi dari sinyal rendah ke tinggi yang dihasilkan oleh sakelar batas ketika lift bergerak melalui lantai terjadi dalam sepersekian detik dan seringkali terlalu cepat untuk dideteksi oleh mikrokontroler. Sakelar batas terhubung ke suplai DC 5V dan output dari terminal NO(Normally Open) terhubung ke pin IO mikrokontroler. Empat sakelar batas di empat lantai mengirim data ke mikrokontroler. Ini memungkinkan mikrokontroler untuk menentukan lantai lift dengan memeriksa pin mana yang bergerak dari rendah ke tinggi. Transisi dari status limit switch ditunjukkan pada diagram di bawah ini:
Tugas rumitnya adalah mengaktifkan mikrokontroler untuk mendeteksi transisi dari rendah ke tinggi. Ada dua metode untuk mendekati masalah ini. Metode pertama adalah menentukan apakah pin limit switch menjadi TINGGI di dalam fungsi loop menggunakan kondisi if. Program pada dasarnya saat mengeksekusi kode lain selalu memeriksa apakah pin menjadi TINGGI. Ini memakan banyak memori karena program terus-menerus mencari sinyal TINGGI dari pin sakelar batas. Masalah lainnya adalah terkadang program mungkin melewatkan transisi ini karena fungsi loop mengeksekusi beberapa kode lain saat transisi terjadi. Untuk menghindari masalah ini, Interupsi digunakan. Interupsi pada dasarnya menjeda eksekusi kode dan menjalankan fungsi terpisah ketika kondisi interupsi tertentu terpenuhi. Ini sangat ideal untuk operasi pengangkatan. Ketika pin sakelar batas beralih dari rendah ke tinggi, fungsi interupsi dijalankan dan fungsi ini memeriksa apakah lift berada di lantai saat ini dan menghentikan lift atau membiarkannya bergerak lebih jauh. Karena program dipaksa untuk menjalankan fungsi interupsi ketika sakelar batas diaktifkan, sistem dapat memastikan bahwa program tidak sengaja melewatkan pendeteksian lantai. Mikrokontroler yang digunakan untuk aplikasi ini adalah Arduino Mega 2560 yang memiliki 6 pin digital yang dapat digunakan untuk interupsi yang ideal digunakan untuk empat lantai. Parameter pertama untuk attachInterrupt adalah nomor interupsi. Biasanya Anda harus menggunakan digitalPinToInterrupt(pin) untuk menerjemahkan pin digital aktual ke nomor interupsi tertentu. Misalnya, jika Anda terhubung ke pin 3, gunakan digitalPinToInterrupt(3) sebagai parameter pertama untuk attachInterrupt. Penting juga untuk dicatat bahwa fungsi delay() tidak akan bekerja di dalam fungsi yang dijalankan oleh Interrupt Service Routine(ISR).
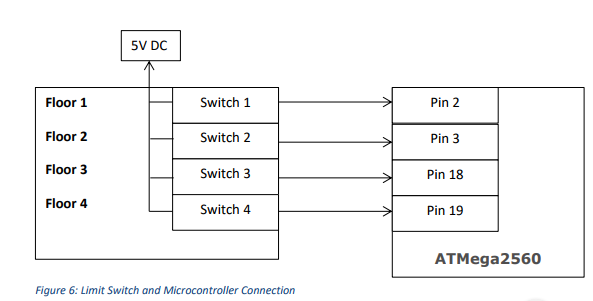
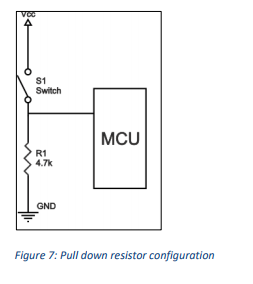
Diagram di atas menunjukkan bagaimana sakelar batas terhubung ke MCU. Pin-pin di MCU dihubungkan melalui resistor pull-down. Resistor ini menarik pin MCU ke ground untuk memastikan bahwa pembacaan tegangan RENDAH dibaca oleh MCU ketika sakelar batas dibiarkan terbuka. Konfigurasi resistor ditunjukkan pada diagram di bawah ini.
1.3 Kontrol Motor Naik dan Turun
Dua relay 12V DC digunakan untuk mengalihkan daya AC ke kontaktor motor yang mengontrol arahnya (baik Atas atau Bawah). Rangkaian yang dirancang menggunakan Multisim ditunjukkan pada diagram di bawah ini:
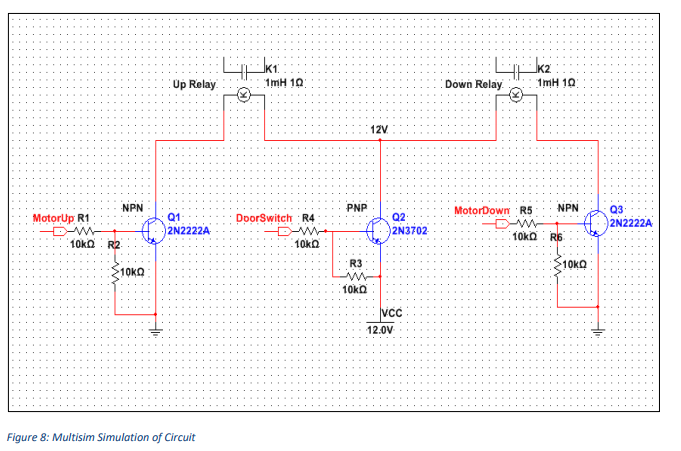
Salah satu ujung kontaktor koil dari kedua relai dihubungkan ke suplai DC 12V melalui transistor PNP. Alasan utama melakukan ini adalah untuk memastikan bahwa Motor tidak diberi daya sampai pintu lift ditutup. Setelah pintu lift ditutup, pin output DoorSwitch ke gerbang transistor PNP ditarik ke ground memastikan bahwa PNP dihidupkan untuk memberikan daya VCC ke kedua relai. Oleh karena itu relai tidak menyala meskipun sinyal MotorUp atau MotorDown HIGH. Ujung koil relai yang lain ditarik ke ground melalui transistor NPN. Sinyal MotorUp dihasilkan dari MCU. Ketika sinyal MotorUp HIGH, transistor NPN pertama diaktifkan dan menarik kontak koil lainnya ke ground untuk menyelesaikan rangkaian untuk memberi daya pada koil Relay Naik untuk memberi daya pada motor. Metode yang sama digunakan untuk mengaktifkan Down Relay. Alasan menggunakan transistor untuk mengganti Relay adalah:
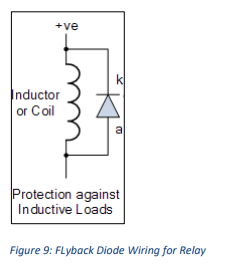
1.3.1 Dioda flyback untuk perlindungan tambahan
Dioda Flyback dipasang di seluruh kontak koil relai untuk memastikan bahwa arus balik memiliki jalur untuk mengalir ketika koil dinyalakan dan dimatikan. Beban induktif seperti kumparan pada relai membuat lonjakan tegangan mendadak ketika arus suplai tiba-tiba terputus. Ini menambahkan perlindungan ekstra ke MCU. Diagram di bawah menunjukkan cara menghubungkan dioda flyback melintasi kontaktor koil relai.
1.3.2 Kontrol masukan pengguna
Pengguna mengontrol pengoperasian lift melalui tombol lantai. Ada empat tombol tekan lantai, ketika ditekan menunjukkan ke mikrokontroler bahwa lift perlu dibawa ke lantai yang diinginkan.

Tombol tekan saat ditekan sebentar menghasilkan sinyal TINGGI dan kemudian sinyal RENDAH saat pengguna melepaskan tombol. Tugas mikrokontroler adalah mengidentifikasi sinyal TINGGI dari tombol lantai yang ditekan oleh pengguna. Tugas khusus ini tidak perlu ditangani melalui interupsi. Selama pengguna menekan tombol untuk jangka waktu yang cukup, MCU dapat mendaftarkan sinyal dari tombol. Tugas mikrokontroler selanjutnya adalah menilai apakah akan menghidupkan motor Naik atau Turun tergantung pada input pengguna dan lantai lift saat ini.
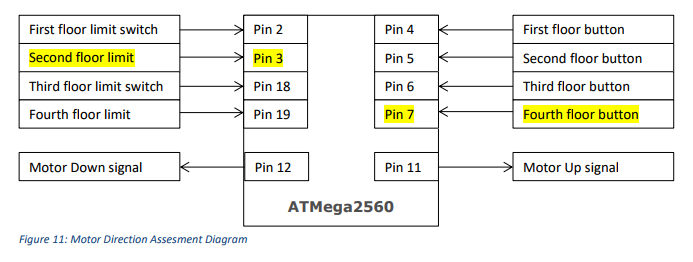
Dengan pemrograman cerdas melalui mikrokontroler, kita dapat menghilangkan perangkat keras tambahan yang diperlukan jika sistem dirancang murni melalui logika dan analog. Sistem lift sebelumnya memerlukan sakelar arah tambahan seperti yang ditunjukkan pada diagram di bawah ini digunakan untuk memungkinkan sistem mengidentifikasi arah perjalanan lift (Naik atau turun).

Tetapi melalui perancangan algoritme untuk menahan lantai lift saat ini dalam variabel dan membandingkannya dengan input dari pengguna memungkinkan sistem untuk sepenuhnya menghilangkan sakelar arah untuk menentukan arah lift harus bergerak untuk mencapai yang diinginkan. lantai. Misalnya:Dalam koneksi Input dan sensor lantai ke diagram MCU yang ditunjukkan di atas, lift menunjukkan kepada MCU bahwa lift berada di lantai dua melalui Pin 3. Kemudian pengguna memasukkan dengan menekan tombol lantai Keempat. MCU menerima perintah ini dan membandingkan dua input. Karena input dari pengguna, “4” lebih besar dari input dari limit switch, “2” MCU mengirimkan sinyal melalui Pin MotorUp untuk mengaktifkan transistor untuk menyalakan relai Up.
Saat lift bergerak ke atas, variabel lantai saat ini dalam program akan diperbarui saat mencapai lantai tiga. Segera setelah sakelar batas dipicu, itu dibandingkan dengan nilai input dari pengguna yang dalam hal ini adalah "4" dan sekali lagi membandingkan nilai ini dengan lantai saat ini yang diperbarui untuk menentukan apakah lift telah mendekati lantai yang diinginkan. Setelah sakelar batas lantai keempat dipicu, MCU mengidentifikasi bahwa lift telah mendekati lantai empat dan mengirimkan sinyal RENDAH melalui pin sinyal Motor Naik untuk menghentikan daya ke motor untuk mencegahnya bergerak lebih jauh.
1.3.3 Isolasi kontrol dari input
Faktor penting lainnya adalah mengisolasi sisi kontrol DC mikrokontroler dari gangguan AC apa pun yang dapat memengaruhi MCU melalui input sistem. Masalah yang saya hadapi karena saya tidak memasang perangkat keras isolasi pada awalnya, gangguan AC yang berasal dari badan logam lift dipindahkan ke MCU melalui sakelar batas. Meskipun limit switch beroperasi pada suplai DC terpisah, input dari limit switch langsung diumpankan ke mikrokontroler, gangguan kemudian terjadi ketika lift mulai bergerak dan karena gangguan AC ini MCU tidak dapat mengidentifikasi lantai lift dengan benar. berada pada. Untuk mengatasi masalah ini, Optocoupler digunakan untuk setiap input guna mengisolasi MCU dari gangguan luar.
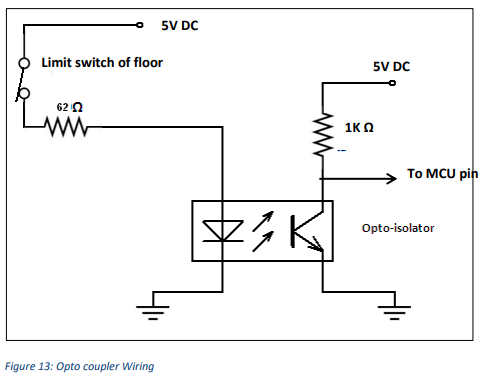
Tujuan dari optocoupler adalah untuk mentransfer sinyal input yang dihasilkan dari sakelar batas lantai ke MCU melalui LED dan fototransistor. Ketika limit switch ditutup maka LED menyala dan cahaya yang masuk dari LED mengaktifkan gerbang fototransistor yang kemudian mentransfer sinyal HIGH ke MCU berhasil mengisolasi input dari luar dan MCU.
1.4 Prototipe

Proses manufaktur
Komponen dan persediaan Arduino Mega 2560 × 1 Alat dan mesin yang diperlukan Jigsaw Aplikasi dan layanan online Arduino IDE Tentang proyek ini Ini adalah lift 5 lantai yang berfungsi. Tingginya 3 kaki. Kami bekerja keras untuk ini. Mari kita mu
Komponen dan persediaan Arduino Mega 2560 × 1 Sakelar Batas Mikro OpenBuilds × 4 Tentang proyek ini Rancang dan uji sistem kontrol untuk lift servis yang beroperasi untuk empat lantai. Mikrokontroler (ATMega2560) digunakan untuk menentukan kontaktor mana yang memberik
Komponen dan persediaan Arduino UNO × 1 Sensor Pencari Jangkauan ToF SparkFun - VL6180 VL53L0X untuk jarak jauh dan VL6180X untuk jarak dekat. disini saya menggunakan VL6180X × 1 motor servo × 1 Aplikasi dan layanan online Arduino IDE Memproses
Komponen dan persediaan Arduino MKR1000 × 1 Klik Lingkungan MikroE × 1 Alat dan mesin yang diperlukan Kabel jumper Adafruit Wanita/Wanita Aplikasi dan layanan online Arduino IDE WolkAbout IoT Platform Tentang proyek ini