

Proses manufaktur

Manufaktur industri
 |
| × | 1 |
|
 |
|
Ini adalah lift 5 lantai yang berfungsi. Tingginya 3 kaki. Kami bekerja keras untuk ini.
Mari kita mulai ... begini cara kerjanya!
Tautan cepat:
Inspirasi
Kami telah bermain dengan Arduino dan pemrosesan tertanam/IoT selama beberapa tahun sekarang, tetapi sebagian besar proyek yang telah kami lakukan (dan sebagian besar telah kami lihat) cukup sederhana. Kami telah lama mencari sesuatu yang "nyata" untuk dilakukan.
Musim panas ini, saya pergi ke perkemahan musim panas yang luar biasa, Project Ember. Itu di San Francisco Bay Area dan itu luar biasa! Anak-anak mendesain dan membangun struktur kayu besar dengan perkakas listrik. Setelah saya tahu saya bisa melakukannya, saya ingin menggabungkan bangunan fisik dengan Arduino dan inilah hasilnya!
Pendekatan
Bagian tersulit untuk mengetahui hal ini adalah teknik deteksi motor dan lantai. Lift nyata mungkin menggunakan motor AC besar dengan sensor di setiap lokasi lantai. Kami tentu saja dapat menggunakan pendekatan ini dengan skala yang lebih kecil tetapi menempatkan sensor di setiap lantai membutuhkan banyak kabel, dan kami akan memiliki kekhawatiran tentang sensitivitas dan keselarasan, dll. Di sisi lain, motor stepper dapat diposisikan dengan tepat … tetapi kami harus tahu persis di mana kita berada dan seberapa jauh kita harus melakukannya.
Untungnya, kami telah melakukan hal serupa, dalam proyek "kalender mewah" kami sebelumnya. Di sana, kami telah menemukan cara menggunakan motor stepper dan yang lebih menarik, untuk menyimpan posisinya di memori non-volatile (EEPROM di Arduino). Jadi kami akan menggunakan pendekatan yang sama di sini. Dengan cara ini kita tidak memerlukan sensor posisi sama sekali, kita hanya mengandalkan kemampuan kita untuk menghitung jumlah langkah yang kita gerakkan motor stepper kita.
Perhatian desain lainnya adalah dengan tombol panggil lift. Mereka perlu dinyalakan sakelar kontak sesaat, tetapi lampu harus dapat dikontrol secara independen dari tombol. Kami menemukan beberapa yang cocok di eBay.
Bahan
Tombol dengan lampu terpisah (Kami membeli dari eBay, seharusnya terlihat seperti:


Anda dapat menemukan semua bahan di bawah ini di Home Depot setempat atau toko perbaikan rumah lainnya:
Bangun
Kami membuat poros dan mobil dari papan serat dan cetakan untuk memperkuat sudutnya.
Kami mulai dengan poros lift. Kami memotong 3 lembar papan serat menjadi 36″x8″ untuk bagian samping dan belakang (bagian depan terbuka). Kemudian menggunakan 4 buah cetakan persegi 3/4″, panjang 36″, kami memasang papan serat bersama-sama untuk membuat poros vertikal. Potongan papan serat persegi di bagian atas dan bawah menahan semuanya berbentuk persegi.
Mobil lift berikutnya. Ini menggunakan jenis konstruksi yang sama, dengan dinding papan serat, langit-langit, dan lantai, dan penyangga cetakan pinus. Ini hampir lebar penuh dari poros, tetapi naik di antara bagian depan dan belakang pinus (jadi lebih lebar daripada dalamnya). Kami memasang pengait mata ke bagian atas mobil, sehingga menggantung dari seutas tali.

Pastikan untuk tidak meletakkan bagian bawah pada poros Anda terlalu dini, karena Anda harus bisa memasukkan dan mengeluarkan mobil! Setelah pengujian selesai, Anda dapat menambahkan bagian bawah.
Motor duduk di atas lift. Kami memasang gulungan kayu biasa (dari benang jahit) ke poros pada motor. Ini agak rumit. Poros motor memiliki tepi yang rata namun tentunya lubang pada spool berbentuk bulat. Jadi kami mengebor dan melubangi kumparan, dan memasang sekrup untuk menahan tepi datar poros motor. Juga, lubang di spool lebih besar dari poros motor. Untuk bertindak sebagai bushing untuk mengambil ruang, kami menggunakan bagian yang sangat pendek dari selang karet berukuran tepat.

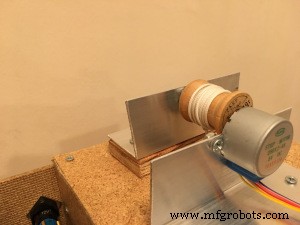
Kemudian kami memasang motor ke sepotong aluminium sudut dan memasangnya ke bagian atas poros. Untuk menopang sisi lain kumparan, kami memasang sekrup melalui potongan aluminium sudut kedua. Hal ini membuat beban elevator tidak akan menarik kumparan dari poros motor, melainkan akan tetap rata.
Kami menggunakan lebih banyak papan serat untuk membuat panel tombol. Di sebelah kiri, kami menggunakan papan setinggi poros untuk tombol panggil. Kami menggunakan tombol merah dan hijau bergantian. Merah untuk bawah, hijau untuk atas. Lantai atas hanya memiliki warna merah dan bagian bawah hanya memiliki warna hijau. Panel "di lift" kami ada di sebelah kanan. Kami membuat lubang untuk matriks LED dan tampilan tujuh segmen selain 5 lubang untuk tombol.


Kami memasang 4 kotak sekrup. Dua di panel panggilan, dan dua di samping di samping "panel lift di dalam".
Pengkabelan
Kabelnya rumit karena ada banyak! Kami memilih untuk menggunakan pelindung prototipe Arduino Mega, sebagian karena kami sudah memilikinya :-). Tetapi motivasi sebenarnya adalah bahwa dengan begitu banyak kabel, kami khawatir ada sesuatu yang pasti akan terputus jika kami hanya menggunakan koneksi pin Arduino standar. Dengan pelindung prototipe, kami dapat menyolder kabel secara langsung dan menghindari risiko tersebut. Selain itu, ini memberi kami tempat yang nyaman untuk meletakkan benda-benda seperti resistor, yang diperlukan untuk tampilan 7-segmen kami.
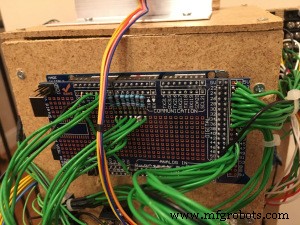
Meskipun demikian, kami tidak ingin semua panel yang berbeda ini disatukan, karena jika kami melakukan kesalahan, akan sangat sulit untuk memperbaikinya. Jadi setiap kabel memiliki semacam ujung yang bisa dilepas. Kami menggunakan blok sekrup antara panel sakelar dan Arduino, dan untuk matriks 7-segmen dan LED, salah satu ujung kabel masih berupa pin quick-disconnect.
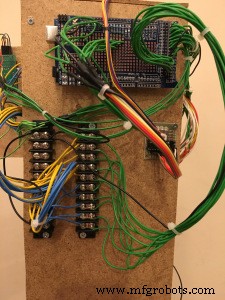
Untuk panel tombol, kami membuat rangkaian kabel sendiri, menggunakan konektor sekop perempuan crimp-on yang pas dengan terminal tombol. Karena setiap tombol membutuhkan dua ground (satu untuk tombol dan satu terpisah untuk lampu), akan ada BANYAK kabel ground jika kita menjalankan semuanya ke Arduino. Jadi, alih-alih, kami menghubungkan semuanya dengan rangkaian kabel khusus yang bagus. Pin sinyal (satu untuk sakelar dan satu untuk lampu di setiap tombol) semuanya terpisah, mengalir ke blok sekrup.


Akhirnya, blok sekrup memberi kami keuntungan lain — kami menggunakan kawat inti padat untuk menyolder ke pelindung prototipe, tetapi kami menggunakan kawat untai untuk konektor crimp-on ke bagian belakang tombol. Blok sekrup memberi kami tempat untuk beralih dari satu ke yang lain tanpa menyolder.
Pemrograman
Kami memiliki banyak revisi kode, tetapi ini adalah versi saat ini. Bagian paling rumit dari perangkat lunak adalah logika untuk mencari tahu ke mana mobil lift harus pergi. Kalau di lantai 2, ada yang di dalam mau ke 3, ada yang mau turun dari 4 dan naik dari 1 … mau ke mana dulu?
Bagian rumit lainnya adalah bahwa cara kerja perpustakaan motor stepper biasanya adalah selama motor bergerak, tidak ada yang memanggil fungsi Arduino "loop()". Namun, seseorang harus menekan tombol saat lift sedang transit. Jadi, Anda tidak dapat mencapai tujuan dalam satu langkah — Anda perlu bergerak sedikit demi sedikit, memeriksa penekanan tombol (dan mungkin perubahan tujuan) di sepanjang jalan.
Anda dapat mengunduh sketsa Arduino kami di sini.
Untuk mengunggah kode:
Anda perlu mengunduh perpustakaan ini:
Unggah kode:
Jika berhasil, selamat! Pindah ke pengujian. Jika tidak, kembali ke langkah 5. Jika tidak berhasil lagi, periksa kembali kabel Anda. Jika itu tidak berhasil, hubungi kami menggunakan link di atas.
Pengujian/Kalibrasi
Karena motor stepper perlu tahu persis di mana harus berhenti untuk setiap lantai, Anda perlu memberi tahunya secara manual – sekali. Ini akan mengingat ini dalam memori non-volatil (artinya akan menyimpannya bahkan ketika daya terputus).
Untuk mengkalibrasi:
Langkah Selanjutnya
Proyek seperti ini tidak pernah benar-benar selesai! Kami ingin membangun kembali struktur elevator dan poros dengan bagian-bagian yang dipotong laser. Kami menggunakan jigsaw genggam untuk melakukan ini dan potongan kami tidak benar-benar lurus ... itu sebagian yang menyebabkan "masalah gesekan" kami. Pada saat yang sama, kami akan merancang dudukan motor yang lebih baik dan mendapatkan motor yang lebih baik dan lebih cepat.
Secara elektronik, kami memiliki permintaan untuk menambahkan bel atau lonceng setiap kali pintu lift terbuka, seperti yang dilakukan oleh banyak elevator nyata. Kami juga akan melakukannya.
Setiap pemikiran atau saran tentang proyek ini, beri tahu kami di komentar!
Riwayat Versi
Catatan:Tautan Google Drive akan diperbarui secara otomatis dengan setiap versi.
Versi 2:Kami memperbaiki bug di mana memanggil lift dari luar di lantai saat ini dapat menyebabkan perangkat lunak hang, mengharuskan Anda untuk menekan tombol reset.
Proses manufaktur
Komponen dan persediaan Kabel jumper (generik) × 1 Arduino Yun × 1 Resistor 221 ohm × 1 Sakelar Tombol Tekan SparkFun 12mm × 1 Breadboard (generik) × 1 Aplikasi dan layanan online Editor Web Arduino Blynk Tent
Komponen dan persediaan Arduino UNO × 1 Resistor 10k ohm × 1 Adafruit LCD Standar - 16x2 Putih di Atas Biru × 1 Breadboard (generik) × 1 Kabel jumper (generik) × 1 Tentang proyek ini Jadi, saya hanya bosan dan sedang menjelajahi hala
Komponen dan persediaan Arduino Nano R3 × 1 modul DHT 11 × 1 SENSOR TEKANAN BMP-280 × 1 Layar LCD ST7735 1,44 inci × 1 ENCLOSURE CETAK 3D × 1 Kabel USB A ke mini USB B × 1 Alat dan mesin yang diperlukan Besi solder (generik)
Komponen dan persediaan Arduino Mega 2560 × 1 Sakelar Batas Mikro OpenBuilds × 4 Tentang proyek ini Rancang dan uji sistem kontrol untuk lift servis yang beroperasi untuk empat lantai. Mikrokontroler (ATMega2560) digunakan untuk menentukan kontaktor mana yang memberik