

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 36 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 36 | ||||
 |
| × | 5 |
 |
| |||
 |
|
 |
|
Video di bawah ini menunjukkan aksi 36 motor servo membuat karya seni elektronik. Arduino Uno dan tiga pengontrol servo PWM 16 saluran bekerja di belakang layar. Inspirasi asli untuk ini adalah versi yang jauh lebih besar dengan 450 servo yang saya lihat di museum seni modern. Tetapi bahkan versi kecil dengan hanya 36 servos ini memberikan beberapa efek yang menarik.
Ada fitur opsional yang belum saya tampilkan di video, tetapi dapat ditambahkan untuk membuat tampilan menjadi interaktif. Ini murni opsional, dan perangkat lunak akan berfungsi dengan baik tanpanya. Untuk opsi ini, lima sensor jarak ultrasonik dipasang di sepanjang bagian belakang tepi atas ke layar. Saat Anda meletakkan tangan Anda di atas sensor tengah, Uno masuk ke mode interaktif, dan semua servos mencoba mengikuti tangan Anda saat Anda menggerakkannya di atas sensor jarak. Saat Anda melepaskan tangan Anda selama beberapa detik, program kembali ke tampilan layarnya. Sekali lagi, Anda dapat menambahkan opsi ini jika diinginkan. Jika tidak, perangkat lunak akan bekerja dengan baik tanpanya.
Perangkat Keras
Seperti yang Anda lihat, proyek ini dibangun di atas papan pasak berukuran 24" kali 48". Lebarnya dipotong menjadi 32 inci. Servo dipasang terpisah 4 inci, dan diamankan ke bagian belakang papan pasak dengan lem panas. Tongkat es loli, dipotong menjadi 3 1/4 inci dipasang ke poros servos, sekali lagi menggunakan lem panas.
Motor servo SG90 adalah satu-satunya barang mahal dalam proyek ini. Anda bisa mendapatkan satu set 8 seharga $20 di Amazon. Meski begitu, Anda perlu menginvestasikan $100 dalam servos. SG90 seharusnya semua servo 180º, tetapi sebagian besar tidak berhasil. Beberapa jatuh jauh dan harus dibuang. Jika Anda membeli 5 set 8, Anda harus dapat menemukan 36 barang yang perjalanannya setidaknya 160º.
Servo harus diatur ke posisi minimumnya (posisi pada PWM 150), dan stik es krim dipasang mengarah horizontal dan ke kanan pada posisi minimum ini, jika dilihat dari depan. Saya telah menyediakan program kecil yang dapat Anda gunakan untuk memastikan servos berada di posisi minimum ini:SetServosToMinimum.
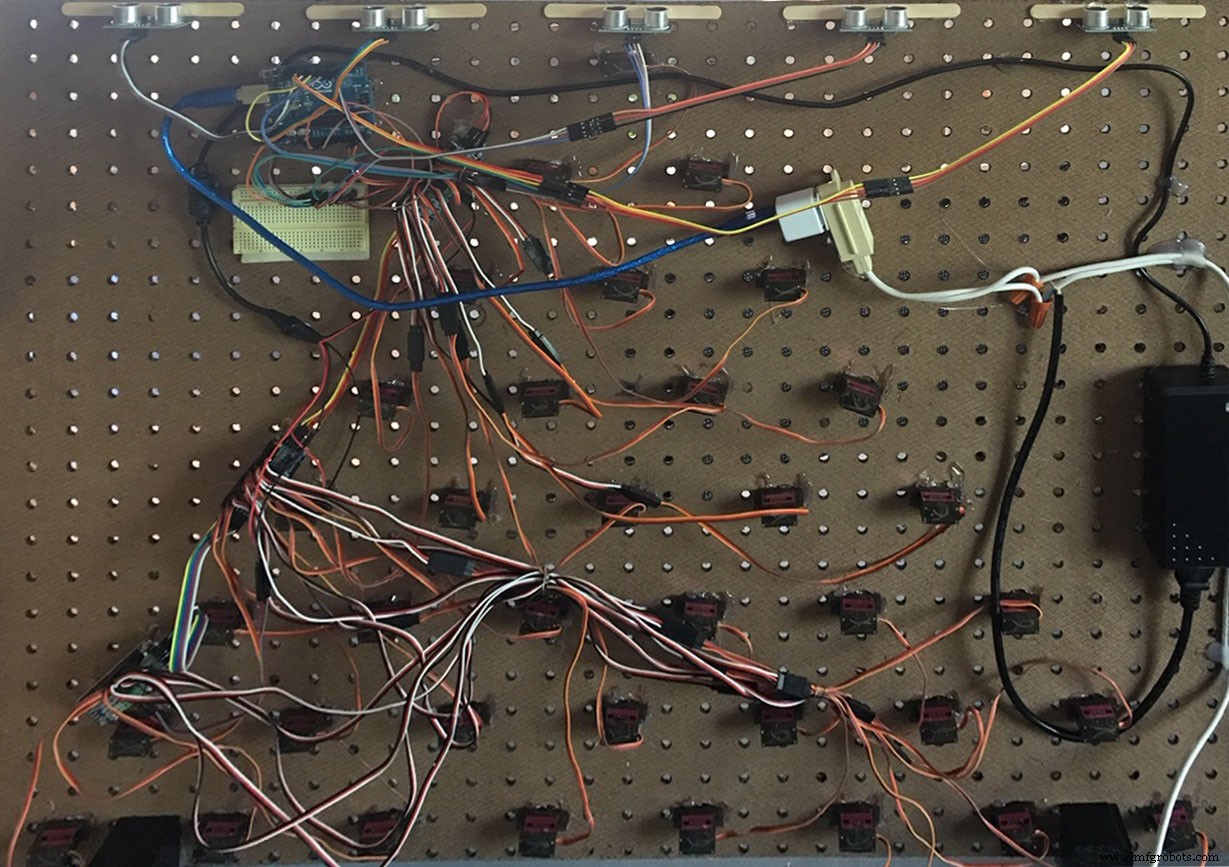
Foto di atas menunjukkan tata letak sisi belakang. Tiga pengontrol PWM dipasang di sisi kiri servos. Suplai 30 watt 5 volt ada di paling kanan. Arduino ditenagai secara terpisah melalui adaptor daya USB. Saya melakukannya dengan cara itu hanya agar saya dapat mencabut kabel USB dan, melalui kabel ekstensi USB, tancapkan ke komputer saya untuk perubahan program. Kelihatannya agak aneh, tapi menurut saya itu nyaman.
Anda juga dapat melihat sensor jarak ultrasound opsional yang dipasang di sepanjang bagian atas layar. Lem panas dan stik es krim ekstra digunakan untuk memasangnya. Papan prototyping kecil yang Anda lihat di bawah Uno ada hanya untuk memfasilitasi mendapatkan daya dan ground ke semua sensor ultrasound.
Perangkat Lunak
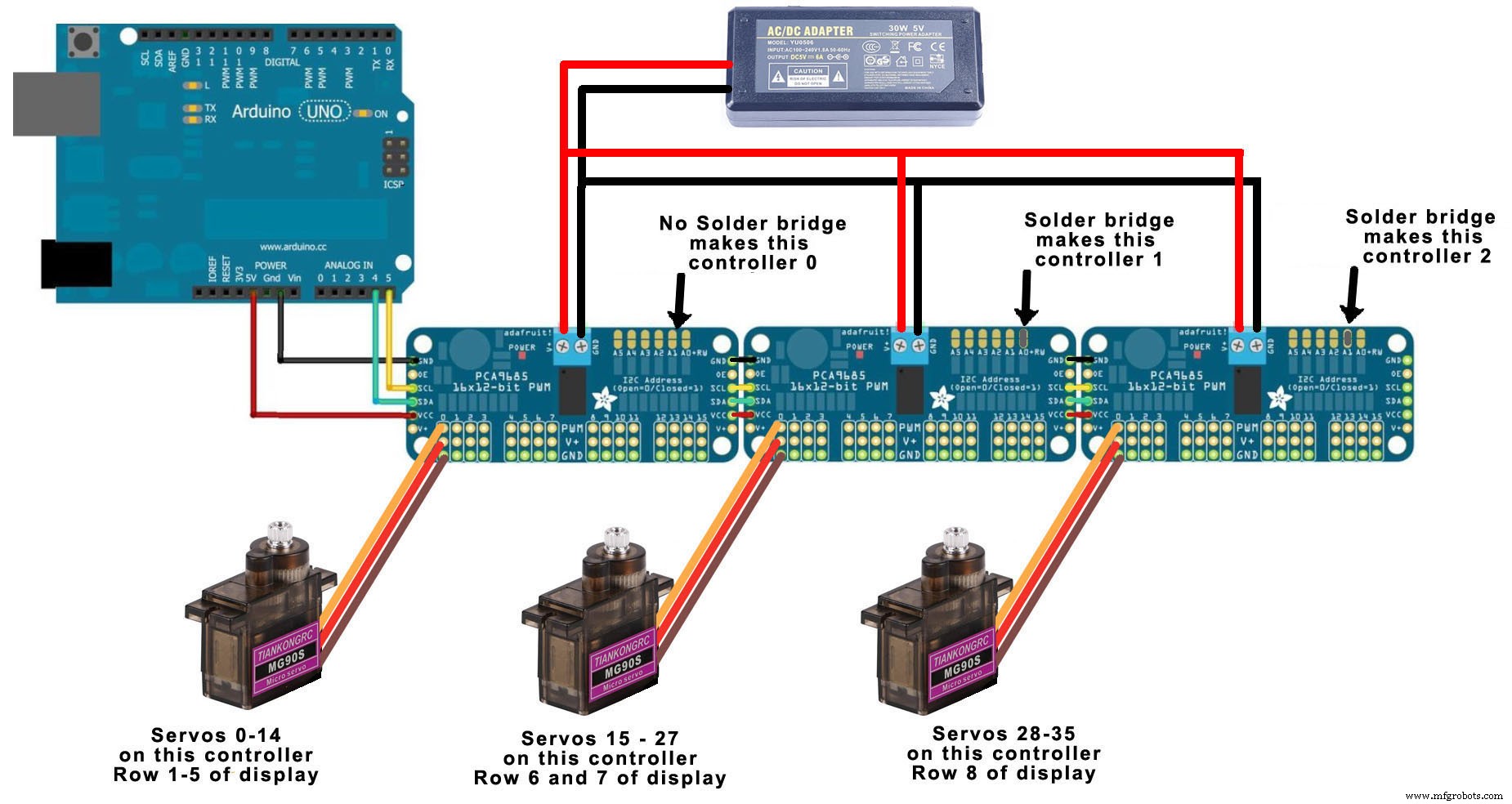
Saya menggunakan perpustakaan Driver Servo PWM Adafruit untuk menangani pengontrol servo 16 saluran, jadi Anda perlu mendapatkannya dari Adafruit dan menginstalnya di perpustakaan Arduino.. Perangkat lunak saya dapat digunakan apa adanya dengan atau tanpa sensor ultrasonik opsional. Ini menyajikan berbagai efek dalam pertunjukan yang berlangsung sedikit lebih dari tiga menit sebelum diulang. Jika sensor opsional dipasang, itu akan memasuki mode interaktif setiap kali tangan ditempatkan di sensor tengah.
Ada banyak hal dalam perangkat lunak. Saya tidak akan mencoba menjelaskan semuanya disini, tapi saya akan memberikan sedikit info tentang cara kerjanya. Saya punya dua meja. Tabel curPos menyimpan posisi saat ini dari setiap servo dibagi tiga. Tabel tarPos menyimpan posisi yang diinginkan dari setiap servo dibagi tiga. Mereka dibagi 3 karena dua alasan. Pertama, ini memungkinkan mereka untuk disimpan dalam satu byte, dan kedua, saya selalu memindahkan servo dalam 3 langkah.
Uno awalnya tidak mengetahui posisi masing-masing servo, jadi pengaturan rutin mengatur semua servo ke posisi vertikal, dan menyetel semua variabel curPos dan tarPos agar sesuai dengan posisi vertikal tersebut. Kami kemudian dapat memindahkan servo dari sana ke posisi lain dengan mengubah posisi yang diinginkan di tarPos.
Subrutin yang disebut goToTargets() adalah cara utama servos dipindahkan. Kami mengontrol ke mana servo pergi dengan menetapkan target di tarPos, Kemudian kami dapat mengontrol seberapa cepat mereka pergi ke sana dengan rutin goToTargets. Ini memiliki dua cara untuk mengontrol kecepatan. Ini menggerakkan servos menuju targetnya dalam peningkatan 15 langkah, di mana input repetisi ke subrutin memberi Anda kelipatan 15 langkah. Input lainnya adalah mydelay, yang hanya menambahkan penundaan dalam milidetik untuk setiap panggilan goToTargets.
Ada banyak hal lain, tetapi pada dasarnya yang lainnya hanyalah berbagai pengaturan dan implementasi dari berbagai efek yang disajikan.
Fungsi interaktif opsional ditangani oleh subrutin yang disebut trackRoutine. Ini disebut ketika rutinitas goToTarget melihat objek (tangan Anda) di suatu tempat di atas sensor ultrasonik tengah. Ia mencoba membuat semua servos mengikuti gerakan tangan Anda saat bergerak di atas sensor. Ketika tidak merasakan tangan selama beberapa detik, ia kembali dan program reguler dilanjutkan.
Tidak ada pratinjau (hanya unduhan).
 Menghubungkan 5 sensor jarak ultrasonik ke Uno untuk mengaktifkan servos untuk melacak gerakan tangan.
Menghubungkan 5 sensor jarak ultrasonik ke Uno untuk mengaktifkan servos untuk melacak gerakan tangan. 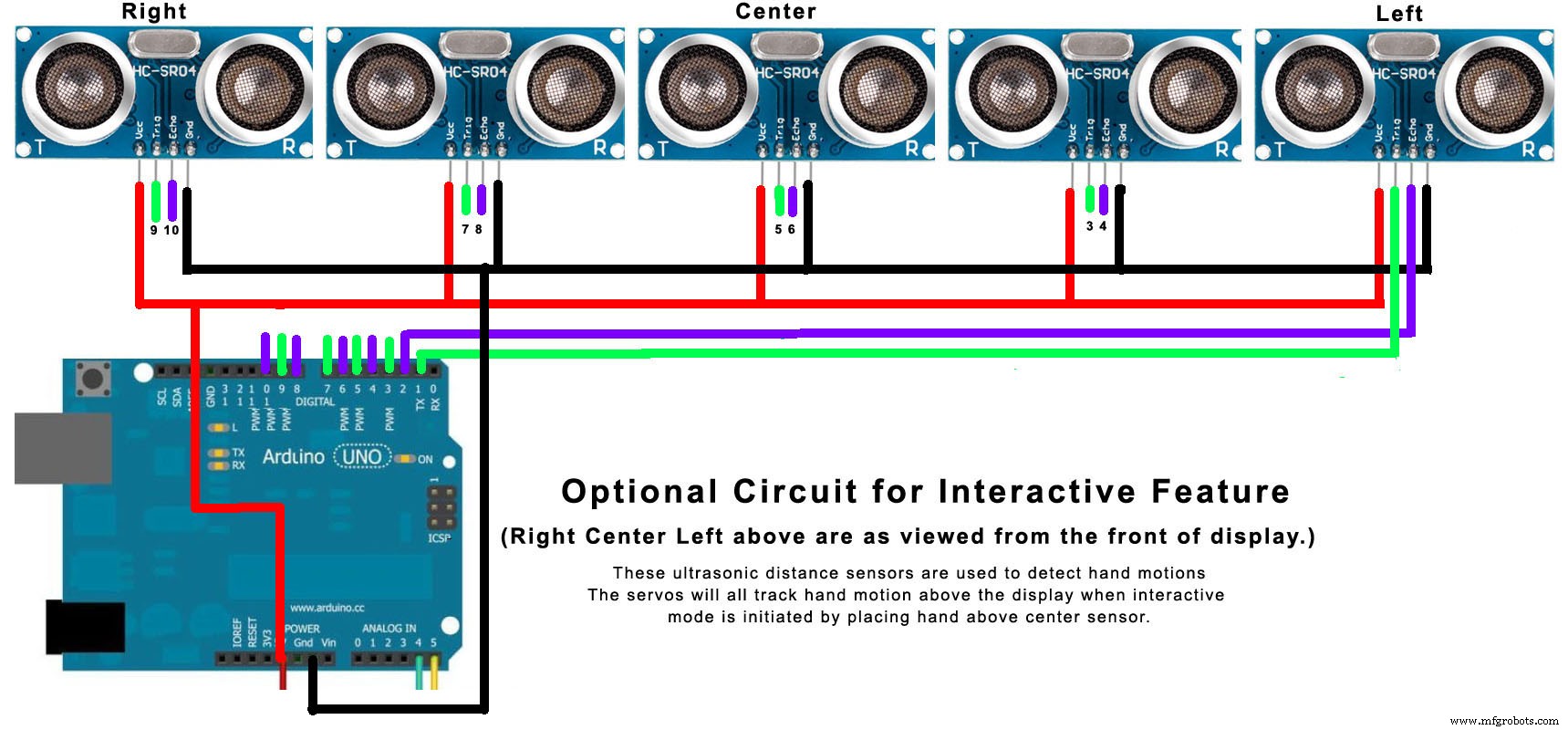
Proses manufaktur
Komponen dan persediaan Arduino UNO Salah satu komponen utama. × 1 Sensor Ultrasonik - HC-SR04 (Generik) Salah satu komponen utama. × 1 Baterai Li-Ion 1000mAh Salah satu komponen utama. × 2 Katoda Umum Difusi RGB Salah satu komponen utama. × 1 Buzzer Sala
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Yaskawa Electric, salah satu produsen robot industri dan teknologi otomasi terbesar di dunia, telah menjual 20 juta penjualan motor servo AC hingga saat ini, menurut siaran pers di situs web perusahaan. Perusahaan telah menawarkan motor dan pengontrol servo AC ke berbagai pelanggan di Jepang dan l
Motor servo juga banyak digunakan di ROBOTICS seperti di INDUSTRI, servo adalah jantung dari proyek ROBOTICS saat ini seperti lengan robot, mobil RC, antena parabola, ban berjalan, penentuan posisi antena, fokus otomatis kamera, proses pencetakan, dll. Dalam banyak proyek hobi, motor servo banyak di