Apa itu Manipulator Robot? Panduan

Bagian-bagian dari robot semuanya berperan dalam operasinya dan menentukan jenis tugas yang dapat digunakan untuk itu. Oleh karena itu, memiliki pemahaman mendalam tentang bagian-bagian tersebut akan menjadi langkah pertama untuk memilih robot industri yang tepat untuk kebutuhan Anda. Meskipun ada banyak bagian yang perlu dipertimbangkan, mungkin akan bermanfaat untuk memulai dengan salah satu bagian utama; manipulator robot.
Apa itu Manipulasi Robot?

Robot adalah mesin yang diprogram untuk secara otomatis melakukan tugas-tugas tertentu yang dapat diprediksi. Untuk melakukan ini, ia harus menangani objek dan memindahkannya atau memengaruhinya melalui tindakan seperti mengelas atau mengebor. Penanganan atau prosedur yang dilakukan pada objek inilah yang disebut sebagai manipulasi robotik. Dengan demikian, definisi ini memberi kita konteks untuk mendefinisikan manipulator robot.
Manipulator robot adalah struktur seperti lengan yang disambungkan ke tubuh robot dan digunakan untuk menjalankan tugas. Robot tanpa manipulator akan sama dengan seseorang yang melakukan tugas dengan tangan terikat di belakang, itu tidak layak. Faktanya, karena alasan inilah manipulator robotik juga dikenal sebagai lengan robot.
Terdiri dari Apa Robot Manipulator?
Sumber:Kawasaki
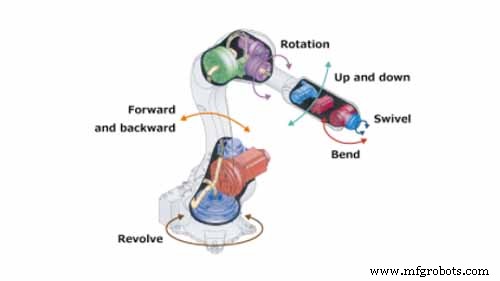
Manipulator robot terdiri dari serangkaian sambungan dan tautan yang menyatu dalam struktur interiornya. Dari luar, lengan manipulator robot hanya tampaknya dipasang ke robot. Namun, rangkaian sambungan dan tautan masuk lebih jauh ke dalam tubuh robot untuk mengikatnya. Ini memastikan bahwa robot dan manipulator bekerja sama dalam gerakan fluida yang terkoordinasi.
Tautan adalah komponen kaku yang menggabungkan berbagai bagian robot. Sementara kekakuannya memberikan struktur yang kokoh, itu akan menyulitkan bagian robot untuk bergerak selama tugas. Akibatnya, sambungan ditambahkan ke tautan untuk memfasilitasi fleksibilitas. Sendi adalah komponen bergerak yang meluncur satu sama lain untuk memfasilitasi gerakan linier, putar, atau revolusioner dari bagian robot. Mereka dibuat dan bekerja dengan cara yang sama seperti siku atau lutut manusia.
Manipulator Robot di Robot Berbeda

Sumber:www. brainkart.com
Jenis dan jumlah sambungan yang dimiliki manipulator robot menentukan derajat kebebasannya, bentuk amplop kerjanya, dan cara penerapannya. Ini pada gilirannya menentukan bagaimana robot dikategorikan. Sebagai ilustrasi, mari kita periksa berbagai jenis robot dan struktur manipulator robotnya.
Robot Kartesius- manipulatornya dihubungkan menggunakan 3 sambungan prismatik yang tegak lurus satu sama lain dan hanya memberikan gerakan geser linier. Akibatnya, robot Cartesian diklasifikasikan sebagai robot 3-sumbu dan memiliki amplop kerja geometris.
Robot Kutub- lengan dan badan robot kutub disambung menggunakan sambungan putar. Jenis sambungan ini memungkinkan gerakan melingkar yang memungkinkan lengan robot kutub bergerak dalam 3 sumbu dalam sistem geometri kutub.
Robot silinder- lengan robot silinder beroperasi menggunakan sambungan putar di pangkalan dan sambungan linier yang memungkinkannya bergerak sepanjang sumbu vertikal. Pengaturan sambungan ini memungkinkan manipulator untuk memanjang dan menarik kembali, tetapi lingkup kerjanya masih terbatas pada bentuk silinder kecil.
Robot SCARA – Sambungan dalam robot SCARA berputar dan memfasilitasi gerakannya di sepanjang sumbu XY sambil tetap kaku di sumbu Z. Karena sambungannya merupakan bidang horizontal, robot SCARA memiliki amplop kerja yang lebar dalam bentuk setengah lingkaran.
Robot Artikulasi – robot artikulasi memiliki manipulator paling fleksibel di antara semua robot lainnya. Lengan manipulator robot dihubungkan ke tubuh robot dengan sambungan putar sedangkan siku dan bagian lain di lengan dihubungkan menggunakan sambungan putar. Sambungan revolute memungkinkan lengan untuk berguling, melempar, dan menguap sehingga membuat robot 6-sumbu.
Aplikasi Manipulator Robot
Fleksibilitas berbagai manipulator robot dapat dimanfaatkan untuk mengotomatisasi proses di industri yang berbeda. Contoh aplikasi tersebut meliputi:
Operasi robotik- dalam aplikasi ini, manipulator robot artikulasi dilengkapi dengan instrumen bedah sebagai efek akhir. Ini dikendalikan dari jarak jauh oleh ahli bedah untuk melakukan manuver bedah.
Pilih dan tempatkan – ini adalah aplikasi industri umum di mana manipulator robot diterapkan untuk tugas memilih dan menempatkan berulang seperti mengemas barang.
Perakitan PCB – dalam hal ini, manipulator robot menggantikan tangan pekerja manusia untuk merakit komponen mikro pada papan PCB dengan presisi dan kecepatan tinggi.
Kesimpulan
Aman untuk mengatakan bahwa makna manipulator robot dalam robotika lebih dari sekadar fungsi. Ini lebih jauh untuk menentukan struktur dan bagaimana robot dapat diterapkan. Manipulator berkualitas dari produsen lengan robot terkemuka karena itu akan menjadi investasi yang layak bagi siapa pun yang berkelana ke robotika.


