Cara Memprogram Konveyor Robot Tanpa Menjadi Gila
Memrogram konveyor robot lebih sulit daripada yang dibayangkan banyak orang. Simulasi yang baik adalah kunci sukses, tetapi bagaimana Anda melakukannya tanpa menjadi gila?
Belt konveyor adalah cara mudah untuk memindahkan produk ke robot Anda, bukan?
Yah… tidak juga. Kita sering menganggap konveyor sebagai solusi sederhana tetapi, pada kenyataannya, konveyor adalah salah satu metode pengiriman benda kerja yang lebih rumit. Mereka membutuhkan robot untuk mendeteksi dan melacak objek yang bergerak di konveyor. Mereka perlu dikendalikan melalui program robot. Mereka juga menderita berbagai masalah mekanis selama masa pakainya, seperti pelacakan yang buruk, keausan sabuk, dan tergelincir. Semua ini berarti bahwa konveyor dapat membuat Anda sedikit gila.
Alih-alih sederhana, mereka bisa rumit untuk digunakan.
Kami tidak dapat menyelesaikan masalah mekanis konveyor Anda — untuk itu, Anda memerlukan jadwal perawatan yang baik seperti yang ditunjukkan dalam daftar periksa praktis dari Cisco-Eagle ini. Namun, kami bisa membantu Anda mensimulasikan konveyor dengan mudah sehingga Anda dapat mengujinya dan mengintegrasikannya dengan pemrograman robot Anda.
Inilah cara memprogram konveyor robot Anda tanpa menjadi gila.
5 Bagian Yang Sulit Bergerak dari Konveyor Robot
Pertama, penting untuk memahami mengapa memprogram konveyor itu sulit.
Ada 5 "bagian yang bergerak" yang membuat sulit untuk mengintegrasikan pemrograman robot dengan konveyor.
1. Kontrol konveyor itu sendiri
Ini mungkin terlihat seperti kontrol konveyor hanyalah kesepakatan "hidup/mati" tetapi biasanya sedikit lebih rumit dari itu. Konveyor memiliki berbagai opsi kontrol, tergantung pada modelnya. Beberapa memiliki kecepatan tetap sementara yang lain dapat dikontrol dengan kecepatan variabel. Beberapa memiliki mode mundur, pengereman aktif, atau peralihan cepat. Lalu ada metode kontrol yang berbeda, tiga yang paling umum adalah kontrol pulsa, kontrol kecepatan, dan kontrol terdistribusi.

Anda mungkin harus mengontrol konveyor di dalam program robot itu sendiri. Jika tidak, Anda mungkin harus berinteraksi dengan konveyor melalui jaringan. Kedua opsi ini menambah kerumitan pemrograman.
2. Pelacakan dan deteksi objek
Untuk mengambil objek dari konveyor yang bergerak, robot harus dapat menemukan lokasinya dengan andal. Ini berarti Anda memerlukan semacam sensor untuk mendeteksi ketika suatu objek tiba di depan robot. Terlebih lagi, robot mungkin memerlukan beberapa cara untuk melacak objek saat konveyor bergerak.
Sensor yang paling umum untuk ini adalah sensor penglihatan (misalnya kamera 2D atau 3D) dan sensor pendeteksi bagian (misalnya, berkas cahaya, sensor magnetik, sensor induktif, dll). Beberapa lebih mudah untuk diintegrasikan daripada yang lain, tetapi semuanya menambah kerumitan ekstra pada program Anda.
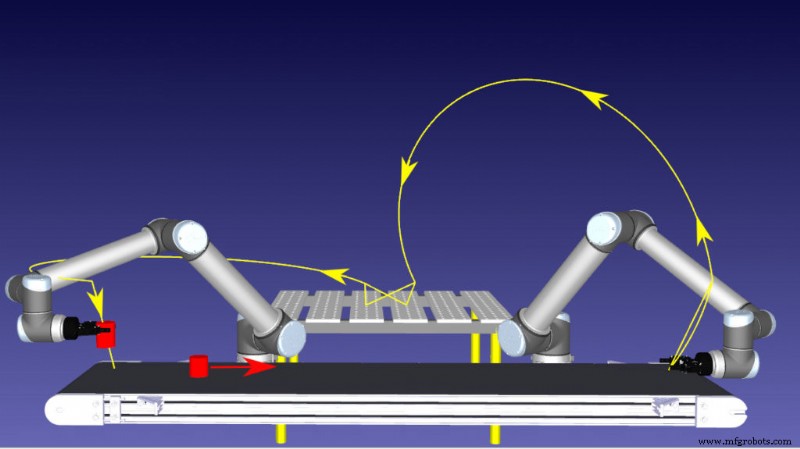
3. Menangani objek bergerak
Target yang bergerak selalu lebih sulit untuk ditangani daripada yang statis. Ini menimbulkan kerumitan saat menggenggam dari ban berjalan. Robot harus dapat bergerak ke posisinya, menggenggam objek dengan kuat, dan menjauh saat objek baru terus berdatangan.
Kecepatan konveyor harus disesuaikan dengan kecepatan robot, jika tidak, objek mungkin terlewatkan. Jika Anda pernah melihat “adegan cokelat” yang terkenal dari komedi tahun 1950-an I Love Lucy, Anda pasti tahu apa yang saya maksud (dan ini dia jika Anda belum pernah melihatnya).
4. Akhiri pilihan efektor
Lengan robot bukan satu-satunya bagian dari sistem yang perlu mengikuti kecepatan. Efektor akhir dapat memiliki pengaruh yang signifikan pada waktu siklus dan, dengan demikian, kecepatan konveyor. Beberapa jenis efektor akhir lebih cepat daripada yang lain.
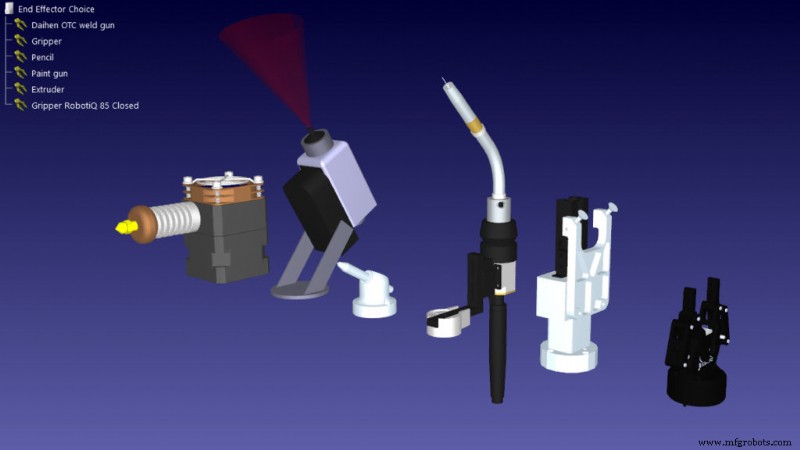
Ini berarti bahwa kita sekarang harus mengontrol dan mengoordinasikan 3 kecepatan independen secara bersamaan:kecepatan konveyor, kecepatan lengan robot, dan kecepatan menggenggam efektor akhir.
5. Penggunaan perlengkapan
Bagian akhir yang bergerak sebenarnya bukanlah bagian yang bergerak sama sekali. Perlengkapan adalah bagian mekanik statis yang dipasang pada konveyor untuk memindahkan objek ke posisinya. Mereka adalah cara yang andal untuk memesan objek di konveyor tanpa menggunakan sensor.
Misalnya, Anda dapat menggunakan perlengkapan sebagai alternatif untuk menggunakan sensor penglihatan. Dengan lembaran logam yang dibentuk khusus, Anda dapat menyalurkan objek ke dalam antrian statis, memungkinkan robot untuk mengambilnya tanpa sensor tambahan. Mereka membuat pemrograman lebih sederhana, tetapi mereka meningkatkan kompleksitas desain mekanis.
Cara Mensimulasikan Konveyor Dengan RoboDK
Anda dapat mengatasi lima tantangan di atas dengan mensimulasikan sistem robot Anda dan mengujinya secara menyeluruh sebelum Anda menggunakan sistem fisik. Ini tidak selalu mudah dengan simulator robot, banyak di antaranya tidak memiliki kemampuan sederhana untuk menambahkan konveyor.
Untungnya, konveyor cukup sederhana di RoboDK. Bahkan ada dua opsi untuk menambahkannya, tergantung pada seberapa banyak kontrol yang Anda butuhkan.
Dua jenis konveyor di RoboDK adalah:
Opsi 1:Pemrograman Python
Metode paling fleksibel untuk membuat konveyor di RoboDK adalah memprogramnya dengan Python. Anda dapat melihat ini beraksi dalam contoh video Simulasi Konveyor dengan RoboDK.
Keuntungan dari pemrograman python adalah:
- Sangat fleksibel. Pergerakan konveyor hanya dibatasi oleh keterampilan pemrograman Anda. Anda dapat memprogram konveyor yang disimulasikan agar sesuai dengan properti sabuk asli Anda.
- Ini sepenuhnya dapat disesuaikan. Anda dapat memprogram konveyor untuk bergerak sesuai keinginan Anda. Anda memiliki kendali penuh atas gerakannya dan bagaimana ia menangani objek.
- Ini memungkinkan konveyor yang lebih kompleks. Jika konveyor Anda memiliki mode kontrol lanjutan, ini dapat disertakan dalam kode python. Juga, jika Anda telah menempatkan perlengkapan untuk memindahkan objek ke sisi sabuk, misalnya, ini dapat diprogram ke dalam kode.
Kekurangan dari pemrograman python adalah:
- Memerlukan keahlian pemrograman . Anda harus dapat memprogram dengan python. Ini adalah salah satu bahasa yang lebih mudah dipelajari, tetapi masih memerlukan kurva pembelajaran jika Anda hanya menggunakan antarmuka grafis RoboDK hingga saat ini.
- Dibutuhkan sedikit lebih lama . Dibandingkan dengan opsi mekanisme linier, pemrograman python memang membutuhkan waktu. Selain itu, semakin rumit konveyor Anda, semakin lama waktu yang dibutuhkan untuk memprogram.
Opsi 2:Mekanisme linier
Opsi lainnya adalah membuat mekanisme linier menggunakan wizard "Mekanisme Model". Ini memungkinkan Anda membuat konveyor sederhana dengan satu sumbu linier.
Keuntungan dari mekanisme linier adalah:
- Cepat. Anda dapat membuat mekanisme linier dalam hitungan menit dan menambahkan konveyor ke simulasi robot Anda dengan sangat cepat.
- Ini menggunakan wizard grafis. Anda dapat membuat mekanisme menggunakan wizard hanya menggunakan kerangka referensi dan target.
- Ini membutuhkan sedikit atau tanpa pemrograman. Anda tidak perlu melakukan pemrograman python untuk membuat konveyor. Namun, perlu diketahui bahwa Anda mungkin harus melakukan beberapa pemrograman untuk mendeteksi objek di konveyor.
Kerugian dari mekanisme linier adalah:
- Terbatas. Sifat sederhana dari mekanisme ini berarti Anda hanya dapat membuat model konveyor sumbu tunggal.
- Tidak fleksibel. Opsi ini mempersulit pemodelan opsi kontrol konveyor Anda yang lebih canggih. Ini juga mempersulit pendeteksian saat benda jatuh dari konveyor.
Cara Memulai
Opsi mana yang Anda pilih sangat bergantung pada banyak hal yang ingin Anda hindari dari pemrograman python. Kecuali Anda memiliki alasan yang baik untuk memilih mekanisme linier, kami biasanya merekomendasikan untuk memilih opsi python. Ini jauh lebih fleksibel dan — menurut saya (walaupun saya seorang programmer) — lebih mudah untuk dipahami dan diterapkan.
Opsi mana pun yang Anda pilih, Anda tidak perlu membuat simulasi konveyor dari awal.
Kami memiliki kedua opsi yang tersedia untuk diunduh di Perpustakaan Robot kami. Cukup pilih "Objek" dari menu "Jenis" dan Anda akan melihat dua opsi:"Model Python" untuk opsi python; dan “Mekanisme Model” untuk opsi mekanisme linier.
Jika Anda buntu, Anda selalu dapat memposting komentar di Forum RoboDK dan kami akan melakukan yang terbaik untuk membantu Anda.


