5 Cara Pakar Memprogram Robot FANUC
Anda telah memutuskan bahwa robot FANUC adalah pilihan terbaik untuk aplikasi pilihan Anda.
Namun, apa cara terbaik untuk memprogram FANUC?
Apakah Anda memiliki pilihan nyata atau apakah Anda perlu menggunakan opsi default yang disediakan oleh pabrikan?
Dengan robot kuning cerah yang khas, pabrikan robot Jepang FANUC adalah pilihan populer bagi orang yang ingin menambahkan otomatisasi robot ke bisnis mereka.
Anda ingin memastikan bahwa Anda mendapatkan hasil maksimal dari robot pilihan Anda… dan itu berarti memilih metode pemrograman terbaik.
Mengapa Cara Default untuk Memprogram FANUC Membatasi
Anda mungkin berasumsi bahwa Anda diharuskan menggunakan metode pemrograman default yang disediakan oleh FANUC. Ini adalah asumsi umum; memang benar bahwa banyak orang menggunakan metode default untuk memprogram robot FANUC mereka.
Ada 2 metode pemrograman default dengan robot FANUC.
Ini adalah:
- TP — Ini adalah bahasa yang digunakan oleh FANUC teaching pendant. Mereka dapat diedit oleh liontin pengajaran dan disimpan sebagai file biner.
- Karel — Ini adalah bahasa pemrograman yang diturunkan dari Pascal (seperti halnya banyak bahasa robot industri). Ini dapat digunakan untuk memprogram robot menggunakan editor teks.
Jika Anda atau seseorang dalam tim Anda memiliki pengalaman pemrograman Karel, atau jika Anda memiliki pengalaman menggunakan FANUC teaching pendant, metode pemrograman ini mungkin merupakan pilihan yang tepat untuk Anda.

Namun, metode default robot pemrograman seringkali jauh lebih sulit untuk digunakan daripada yang seharusnya. Mereka juga kehilangan fungsionalitas hebat yang menyertai metode pemrograman lain.
Anda bisa kehilangan pemrograman yang lebih intuitif dan kuat jika hanya memilih opsi default.
5 Cara Pakar Memprogram Robot FANUC
Cara terbaik untuk memprogram robot adalah yang menggunakan keterampilan Anda yang ada sepenuhnya. Salah satu yang juga memungkinkan Anda mengakses semua kemampuan yang Anda butuhkan dari robot.
Berikut adalah 5 cara hebat untuk memprogram robot FANUC Anda; cara yang memanfaatkan keahlian dan kemampuan robot Anda dengan sebaik-baiknya:
1. Dengan Mengajar Liontin
Tentu saja, cara pemrograman default robot digunakan secara luas oleh para ahli dalam pemrograman FANUC. Liontin pengajaran yang disertakan dengan robot akan memungkinkan Anda mengakses banyak aspek fungsi intinya.
Ajarkan pemrograman liontin melibatkan banyak pekerjaan; menekan tombol, menavigasi menu, dan mendorong robot ke posisi yang diinginkan dengan mata (teknik yang dikenal sebagai "jogging"). Membuat program dengan ukuran dan kompleksitas yang wajar adalah proses yang panjang. Ini adalah proses yang sama melelahkannya untuk membuat perubahan pada program nanti.
Ajarkan pemrograman liontin dapat menjadi kuat di tangan yang tepat. Namun, masalah utama adalah metode pemrograman online yang memakan waktu lama. Artinya, robot perlu dihentikan untuk memprogram ulang, yang menurunkan produktivitasnya.
2. Dengan Pemrograman Offline Berbasis Teks
Anda dapat mengurangi efek negatif dari pemrograman online dengan menggunakan pemrograman offline dengan robot FANUC Anda. Ini berarti Anda membuat program di komputer. Anda kemudian dapat mengunduhnya ke pengontrol robot setelah selesai.
Bentuk paling dasar dari pemrograman offline adalah mengkodekan program dalam editor teks; menggunakan bahasa pemrograman Karel FANUC. Namun, ini mengharuskan Anda memiliki banyak pengalaman dalam memprogram robot FANUC. Tidak ada cara bagi Anda untuk men-debug program saat Anda pergi. Akibatnya, fase debug pada robot fisik akan lebih lama dan menyebabkan penundaan yang serupa dengan pemrograman online.
3. Dengan Pemrograman Offline Grafis
Cara yang lebih baik untuk memprogram robot FANUC Anda secara offline adalah dengan menggunakan perangkat lunak pemrograman offline khusus. Ini memungkinkan Anda untuk membuat dan men-debug program robot. Anda dapat melakukannya menggunakan simulator grafis sebelum Anda perlu mengeluarkan robot dari produksi.
Tentu saja, beberapa alat pemrograman offline lebih mudah digunakan daripada yang lain. Misalnya, RoboDK adalah perangkat lunak pemrograman dan simulasi offline yang dapat digunakan siapa saja, bahkan tanpa pengalaman robotika.
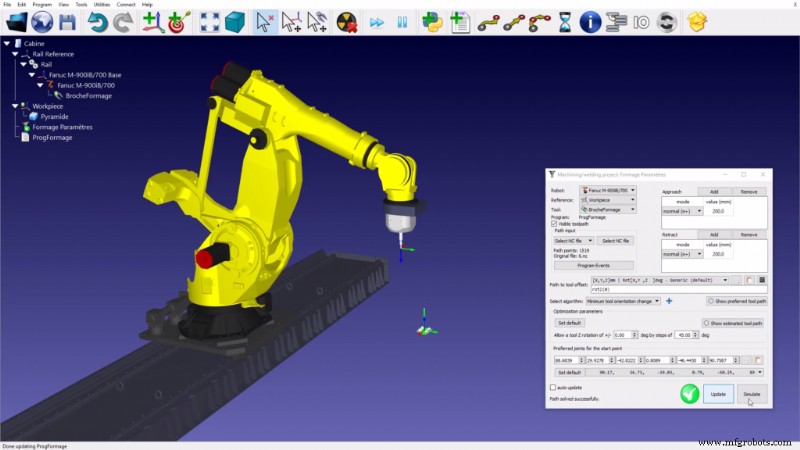
RoboDK menyediakan antarmuka grafis yang intuitif dan menghadirkan kemampuan ekstra untuk pemrograman robot Anda. Ini tidak tersedia dengan metode konvensional seperti; wizard pemesinan khusus, kemampuan pencetakan 3D, dan banyak lagi.
4. Dengan Bahasa Pemrograman Favorit Anda
Jika Anda seorang programmer berpengalaman tetapi tidak memiliki banyak pengalaman khusus dengan FANUC atau robotika, Anda mungkin bertanya-tanya apakah Anda dapat memprogram robot menggunakan bahasa favorit Anda.
Di masa lalu, ini akan sulit karena akan melibatkan pembuatan pustaka pembungkus dan mungkin pustaka komunikasi jaringan untuk berinteraksi dengan pengontrol robot. Tapi, sekarang bisa dan mudah.
Dengan RoboDK, Anda dapat menggunakan salah satu dari beberapa bahasa pemrograman tingkat tinggi untuk memprogram FANUC Anda. Anda dapat menguji program secara offline di simulator sebelum mengunduhnya ke robot.
5. Dengan Penyelidik Genggam
Keempat metode sebelumnya melibatkan setidaknya beberapa pemahaman tentang geometri dan pemrograman robot. Bahkan dengan perangkat lunak offline grafis, di mana Anda dapat menyeret robot berkeliling dalam simulasi grafis. Anda masih perlu memikirkan bagaimana lingkungan simulasi berhubungan dengan lingkungan dunia nyata.
Dengan semua itu, ada satu lagi cara ahli untuk memprogram robot FANUC yang bahkan lebih mudah digunakan daripada yang lainnya.
Dengan RoboDK TwinTrack, Anda dapat membuat program hanya dengan menelusuri gerakan robot yang diinginkan menggunakan probe genggam. Robot kemudian memutar ulang gerakan itu. TwinTrack juga kompatibel dengan pemrograman offline sehingga tidak perlu memengaruhi produksi robot.
Apa Cara Terbaik untuk Memprogram Robot FANUC Anda?
Jadi, mana dari metode pemrograman ini yang terbaik untuk Anda?
Seperti yang telah disebutkan, metode pemrograman terbaik adalah metode yang memanfaatkan keterampilan Anda sebagai programmer sebaik mungkin dan memungkinkan Anda mengakses sebagian besar kemampuan robot.
Tentu, metode default yang disertakan dengan robot FANUC mungkin memenuhi kriteria ini.
Dengan opsi lain yang tercantum dalam artikel ini, Anda dapat mengakses fungsionalitas yang lebih kuat dengan lebih mudah. Anda tidak perlu terus-menerus menekan tombol pada liontin pengajaran robot atau mengikat diri Anda dengan bahasa pemrograman Karel.
Jika Anda ingin mencoba memprogram FANUC Anda dengan RoboDK, Anda bisa mendapatkan versi uji coba secara gratis di halaman unduhan RoboDK.
Untuk petunjuk lebih lanjut tentang cara memprogram robot FANUC dengan RoboDK, lihat halaman dokumentasi khusus kami.
Perjuangan apa yang Anda miliki dalam memprogram robot FANUC? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


