11 Dasar Pemrograman Robot Paling Berguna
Properti dasar mana yang paling berguna untuk diketahui saat Anda memulai pemrograman robot?
Apakah Anda baru mengenal dunia robotika atau hanya ingin meningkatkan keterampilan pemrograman Anda, berikut adalah dasar-dasar pemrograman robot teratas yang baik untuk diketahui.
Terkadang Anda merasa membutuhkan gelar dalam bidang robotika untuk memulai pemrograman robot. Pendekatan konvensional untuk pemrograman robot industri terlihat sulit dipahami oleh programmer robotika baru.
Namun, dengan dasar-dasar robotika yang layak dan perangkat lunak pemrograman robot yang baik, Anda dapat memulai dengan mudah dan cepat.
Berikut adalah 11 dasar pemrograman robot yang paling berguna:
1. Bagian Dasar Robot
Sebelum Anda mulai mempelajari cara memprogram robot, akan sangat membantu jika Anda memahami bagian dasar robot industri apa pun. Dengan begitu, Anda setidaknya merasa nyaman dengan mesin fisik yang akan Anda program.
Misalnya, bagian paling dasar dari robot industri 6 DoF adalah:
- Lengan manipulator
- Efektor akhir
- Pengontrol
- Sumber daya
- Sensor (jika ada)
Komponen akan sedikit berbeda tergantung pada jenis robot.
2. Derajat Kebebasan
Saya telah memperkenalkan konsep penting dalam robotika:Derajat Kebebasan (DoF).
DoF robot menentukan berapa banyak sumbu independen yang dapat digerakkan oleh robot. Misalnya, lengan manipulator 6 DoF akan memiliki 6 sumbu yang dapat dikontrol secara independen. Beberapa DoF adalah "revolute" (yaitu mereka berputar di sekitar suatu titik) dan beberapa adalah "linier" (yaitu mereka bergerak sepanjang garis). Sangat membantu untuk mengenal DoF robot apa pun sebelum Anda memprogramnya.
3. Sendi dan Efektor Akhir
"Akhir bisnis" robot (yaitu bagian yang beroperasi pada tugas) dikenal sebagai "efektor akhir". Saat Anda memprogram, Anda biasanya paling sering tertarik untuk mengarahkan efektor akhir robot ke lokasi tertentu.
Untuk menggerakkan robot, Anda perlu mengirimkan instruksi dengan posisi yang diinginkan dari masing-masing DoF robot. Jika Anda menggunakan perangkat lunak seperti RoboDK, Anda dapat memprogram posisi efektor akhir yang diinginkan secara langsung alih-alih mengirim posisi gabungan tertentu.
4. Pose:Posisi dan Orientasi
Bagaimana Anda memprogram efektor akhir untuk memberi tahu ke mana harus pergi?
Posisi dan orientasi efektor akhir robot (atau lokasi lain yang Anda program) digabungkan untuk membentuk "pose". Anda perlu menentukan pose lokasi mana pun yang akan dipindahkan robot dalam program Anda. Metode paling umum untuk menentukan pose dalam pemrograman adalah melalui Euler Angles.
Untuk informasi lebih lanjut, lihat artikel kami Robot Euler Angles:The Essential Primer.
Karena kami paling tertarik dengan pose efektor akhir saat kami memprogram robot, kami sering menggunakan istilah Titik Pusat Alat untuk merujuk ke pusat operasional alat.
Berikut adalah beberapa contoh untuk efektor akhir yang berbeda:
- Pistol lem — Anda dapat menyetel TCP agar berada di ujung tombak.
- Gripper — TCP mungkin berada di tengah jari gripper.
- Pistol las — TCP mungkin beberapa milimeter dari ujung pistol, tempat nyala api paling panas.
Sebagai programmer, Anda dapat memilih tempat yang paling masuk akal untuk menempatkan TCP robot.
6. Kinematika
Salah satu aspek yang lebih menantang dari robotika adalah kinematika. Ini hanya berarti susunan geometris robot. Kinematika direpresentasikan sebagai persamaan atau algoritma yang agak besar.
Persamaan Forward Kinematic menjawab pertanyaan “Jika saya mengatur sambungan robot ke posisi tertentu, di mana TCP akan berakhir?”
Algoritme Inverse Kinematic menjawab pertanyaan sebaliknya “Jika saya ingin TCP berakhir pada pose ini, posisi apa yang saya perlukan untuk mengatur sambungan?”
Dengan perangkat lunak pemrograman robot yang bagus, Anda mungkin tidak perlu merumuskan kinematika Anda sendiri, tetapi memahami konsep dasarnya akan sangat membantu.
7. Batas Bersama
Persamaan kinematik menggambarkan robot menggunakan geometri murni dan matematika. Namun, robot adalah mesin fisik. Robot fisik sering kali tidak dapat mencapai setiap posisi yang menurut geometri dapat dicapai.
Kami memperkenalkan batas sambungan ke dalam pemrograman untuk membatasi pergerakan sambungan robot hanya pada posisi yang memungkinkan secara fisik. Mereka hanya memberi tahu program “Sambungan ini tidak dapat bergerak melampaui sudut tertentu ini.”
8. Pindahkan Jenis
Saat Anda memprogram robot, ada berbagai jenis gerakan yang bisa Anda buat oleh robot.
3 gerakan dasar adalah:
- Gerakan Bersama — Ini adalah gerakan cepat dan kasar di mana setiap sendi berusaha mencapai posisi targetnya secepat mungkin. Untuk menghindari tabrakan, gerakan sendi hanya boleh diprogram saat robot bergerak di ruang bebas.
- Gerakan Linier — Ini adalah gerakan terkontrol sepanjang garis antara dua pose. Robot akan bergerak lebih lambat dengan gerakan linier, tetapi juga tidak akan menimbulkan tabrakan yang tidak membantu.
- Gerakan Melingkar — Seperti gerakan linier, robot bergerak dalam garis terkontrol, kali ini sepanjang jalur melingkar.
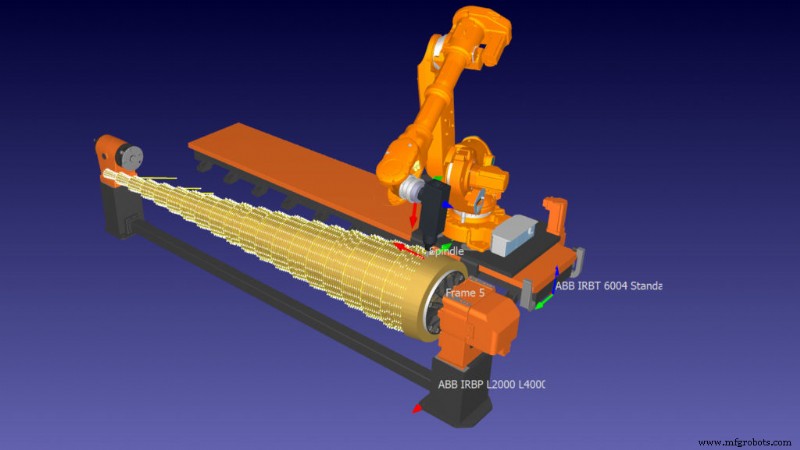
9. Simulasi dan Pemrograman Offline
Ada banyak cara berbeda untuk memprogram robot, termasuk “membuat tangan Anda kotor” dengan bahasa pemrograman (biasanya rumit) yang disediakan oleh produsen robot.
Simulasi dan pemrograman offline menawarkan metode pemrograman yang lebih mudah. Alih-alih memprogram robot fisik secara langsung, Anda memprogram model simulasi robot menggunakan perintah intuitif. Perangkat lunak kemudian mengubah program menjadi kode yang dapat dipahami oleh robot fisik.
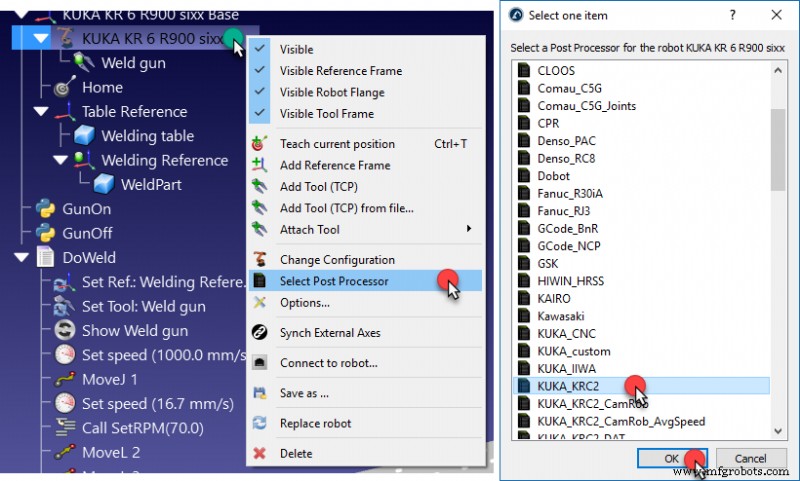
10. Pasca-prosesor
Bagian dari perangkat lunak pemrograman offline yang mengubah program robot dikenal sebagai post-processor. Perangkat lunak pemrograman akan memiliki pasca-prosesor yang berbeda untuk setiap produsen robot, terkadang lebih dari satu.
Anda dapat mengetahui lebih lanjut tentang pasca-prosesor di artikel kami Robot Pasca-Prosesor:Semua yang Perlu Anda Ketahui.
11. Men-debug
Apa pun metode pemrograman yang Anda gunakan, keterampilan dasar yang vital adalah debugging. Anda harus selalu men-debug program Anda untuk memastikan bahwa program itu bekerja seperti yang Anda inginkan sebelum Anda mengatur robot Anda berjalan di lingkungan produksi.
Pemrograman offline memberi Anda langkah debug tambahan karena Anda memprogram model simulasi robot sebelum mengunduh program ke robot fisik itu sendiri, yang mengurangi kemungkinan kesalahan.
Jika Anda ingin segera memulai pemrograman robot, Anda dapat mengunduh uji coba RoboDK gratis di sini.
Aspek dasar pemrograman robot apa yang ingin Anda bantu? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


