Chipset radar pencitraan 4D meningkatkan identifikasi objek
Radar semakin panas, terutama dengan kemajuan yang menjanjikan identifikasi/klasifikasi objek dan resolusi garis lintang yang lebih tinggi — sesuatu yang tidak dapat dilakukan radar tradisional. Dengan inovasi baru ini, radar muncul sebagai sensor yang paling dicari di antara pembuat mobil dan Tier Ones yang mengembangkan kendaraan yang sangat otomatis.
Solusi sistem radar (Sumber:NXP)
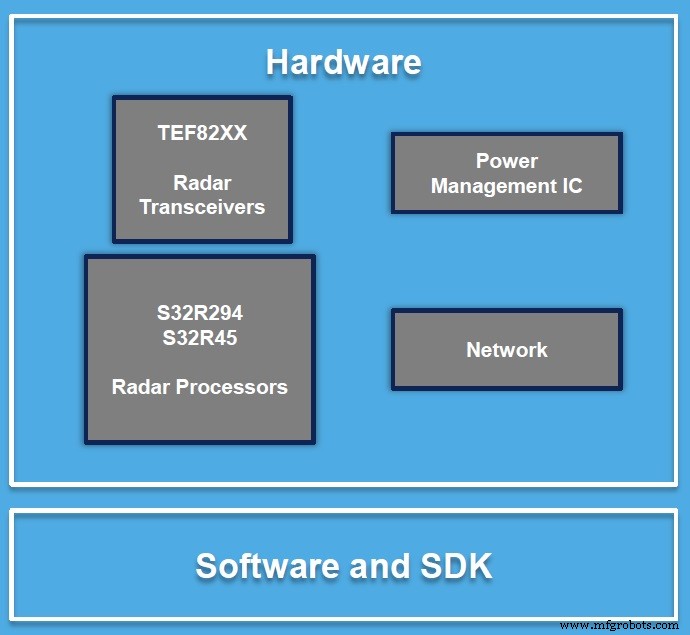
Menanggapi ekspektasi tinggi dari industri otomotif, NXP Semiconductors mengumumkan bahwa mereka mengambil sampel rangkaian chipset sensor radar baru, yang terdiri dari prosesor radar S32R45 perusahaan dan transceiver 77GHz baru yang disebut TEF82xx.
NXP, yang memelopori radar RF CMOS dengan chip radar pertamanya yang disebut “Dolphin” lima tahun lalu, telah menjadi pemasok solusi radar otomotif terkemuka.
Sensor pencitraan 4D NXP dapat mengukur tidak hanya jangkauan dan kecepatan, tetapi juga "elevasi, arah, dan sudut datang, sambil mengidentifikasi objek pada resolusi yang jauh lebih tinggi," jelas Torsten Lehmann, wakil presiden eksekutif dan manajer umum untuk pemrosesan frekuensi radio, selama wawancara dengan EE Times . Dengan radar pencitraan 4D yang dapat memahami tidak hanya bidang horizontal tetapi juga bidang vertikal, kendaraan dapat, misalnya, menentukan apakah akan mengemudi "di bawah" atau "di atas" suatu objek, kata Lehman.
“Bayangkan pemandangan ketika kendaraan melaju dengan kecepatan 80 kilometer per jam di jalan raya, sementara sepeda motor — benda kecil dengan reflektifitas rendah — datang dari belakang dengan kecepatan 200 kilometer per jam” katanya. Tidak seperti kamera dan lidar, radar baru yang ditingkatkan ini dapat mengidentifikasi sepeda motor, awalnya berjauhan, dan mengenali kedua objek ini bergerak dengan dua kecepatan berbeda, jelas Lehmann.
(Sumber:NXP)
Sejauh ini, radar telah menjadi satu-satunya sensor yang mampu beroperasi lebih dari 300 meter, mengenali objek yang berjalan dengan kecepatan tinggi. Baik kamera maupun lidar tidak dapat menangani jarak dan kecepatan sebanyak itu.
Dengan munculnya radar pencitraan beresolusi lebih tinggi, banyak pemasok radar, termasuk NXP, ingin meningkatkan radar sebagai satu-satunya sensor berkecepatan tinggi yang dapat berfungsi dalam kondisi cuaca dan pencahayaan terburuk.
Skalabilitas
NXP tidak sendirian dalam membicarakan radar pencitraan 4D. Continental mengumumkan pada September lalu bahwa mereka menggunakan Xilinx FPGA untuk menyebarkan radar pencitraan 4D siap produksi pertama di industri otomotif, yang diharapkan akan dikirim dengan kendaraan penumpang pada tahun 2021.
Mengingat pengalaman produksi volume NXP dengan transceiver RF CMOS 77GHz, dan prosesor radar S32R45, NXP mengklaim set chip radar pencitraan 4D-nya dapat secara substansial mengurangi biaya dan efisiensi daya dibandingkan dengan implementasi FPGA tujuan umum. NXP, bagaimanapun, menahan diri dari menentukan tingkat pengurangan biaya/daya.
Phil Magney, pendiri dan presiden VSI Labs, memberi tahu kami, “Kami telah mengikuti dengan cermat ruang ini selama beberapa tahun sekarang. Ironisnya, pertama kali saya mendengarnya adalah dari presentasi NXP beberapa tahun yang lalu. Saat itu, radar ini dihadirkan sebagai pesaing potensial untuk lidar karena radar baru dapat menghasilkan awan titik.”
Jelas, NXP telah merencanakan peluncuran radar pencitraan 4D untuk beberapa waktu.
Tapi nada NXP sedang bergeser. Alih-alih hanya membicarakan kemampuannya untuk menghasilkan awan titik, penekanan perusahaan kini telah beralih ke skalabilitas yang ditawarkan oleh rangkaian solusi radar barunya.
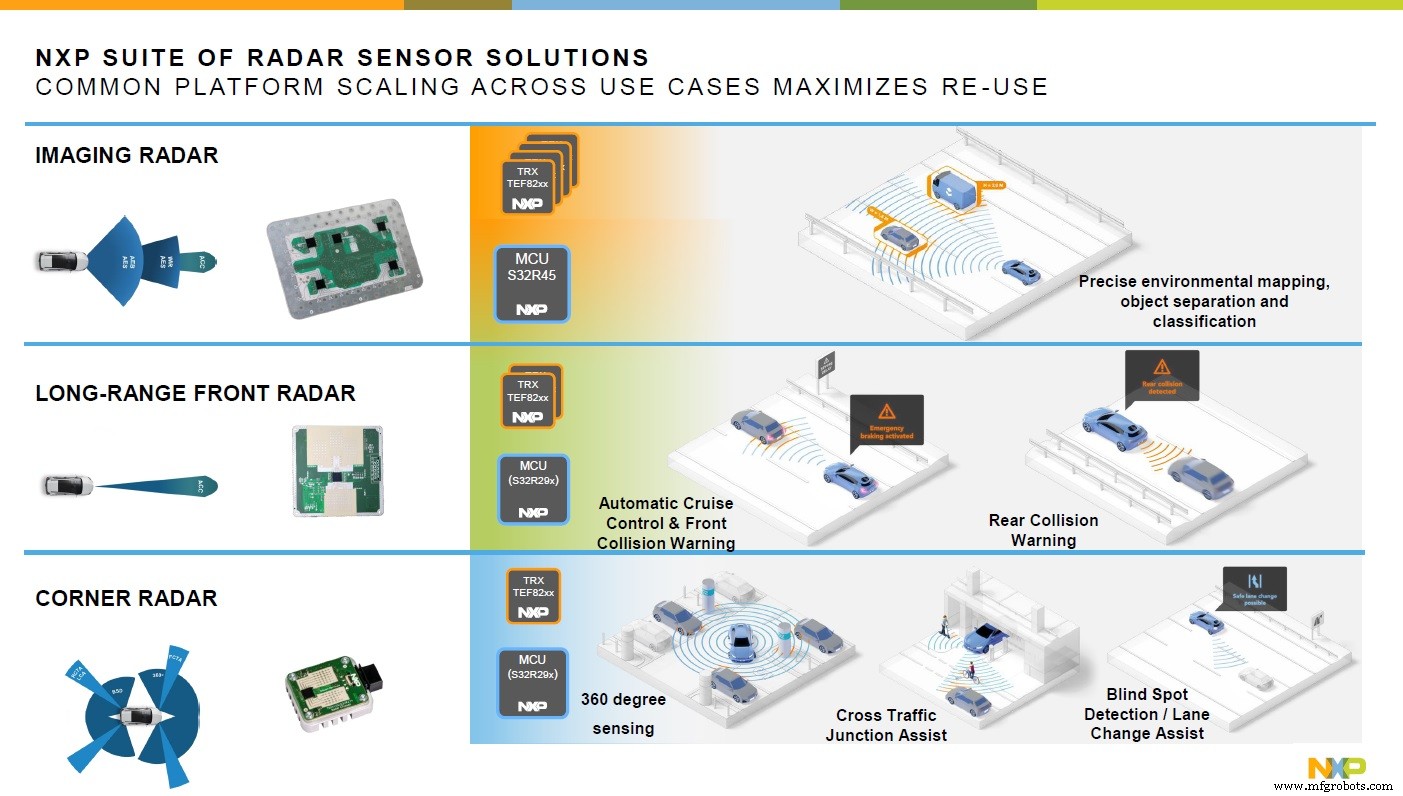
NXP sekarang memuji “platform umum yang berskala di berbagai kasus penggunaan,” mulai dari radar sudut dan radar depan jarak jauh hingga radar pencitraan. Ini penting bagi industri yang mencari teknologi untuk memenuhi persyaratan New Car Assessment Program (NCAP) yang menuntut kinerja yang lebih baik di fitur blind spot dan pengereman darurat otomatis. Meskipun NCAP tidak menentukan teknologi sensor yang disukai, pembuat mobil — yang ditekan untuk memenuhi persyaratan NCAP — mencari teknologi radar yang lebih baik yang dapat mendeteksi objek di sudut dan depan, jelas Lehmann.
klik untuk gambar ukuran penuh (Sumber:NXP)
Untuk deteksi titik buta dan bantuan jalur di kendaraan Leve1 dan 2, kombinasi transceiver TEF82xx tunggal NXP dan prosesor radar S32R45 berfungsi. Penambahan cruise control otomatis dan peringatan tabrakan depan dan belakang ke mobil L2 dan L3 akan membutuhkan dua transceiver, bukan satu. Untuk pemisahan dan klasifikasi objek yang diminta oleh kendaraan otonom L4 dan L5, OEM dapat menggabungkan empat transceiver bertingkat dengan satu prosesor radar.
Kuncinya adalah selama transisi ke otomatisasi yang lebih tinggi, pembuat mobil yang harus menangani beragam merek dan model harus dapat menggunakan satu platform yang dirancang untuk menggunakan kembali perangkat lunak dan perangkat keras.
Transisi ke radar pencitraan 4D
Namun, evolusi radar otomotif dikacaukan oleh jargon pemasaran.
Radar tradisional — terkadang disebut 2D — dialihkan sebagai radar pencitraan. “Radar pencitraan pada dasarnya menciptakan susunan di mana kerapatan pengukuran meningkat secara dramatis,” jelas Magney. “Radar 2D tradisional kasar jika dibandingkan dan hanya menghasilkan satu titik per objek. Tetapi radar pencitraan akan menghasilkan banyak titik untuk lebih memahami apa yang sedang dilacak.” Singkatnya, dia mencatat, “Radar pencitraan menghasilkan resolusi vertikal di mana radar tradisional bekerja dari satu pesawat.”
Lalu bagaimana perbedaan radar pencitraan 3D dan 4D?
“Saya pikir waktu digunakan di dimensi keempat. Saya telah mendengar ini dari beberapa perusahaan lain juga dan ini adalah bagaimana mereka menggunakannya,” kata Magney. Namun dia menambahkan, “Sejujurnya, 4D lebih merupakan hype pemasaran daripada yang lainnya, karena elemen waktu berasal dari Doppler. Jadi, jika ini masalahnya, 2D tradisional bisa disebut 3D.”
Dengan kata lain, elemen waktu selalu penting untuk apa yang ditawarkan radar. Ditanyakan pertanyaan yang sama, Lehman dari NXP mencatat bahwa elemen keempat dari sensor pencitraan 4D adalah "resolusi lateral." Radar pencitraan 4D menangkap lingkungan dengan lebih baik, menentukan apakah kendaraan dapat terbang di bawah atau di atas suatu objek.
Resolusi garis lintang
“Resolusi lintang yang lebih tinggi” diterjemahkan menjadi resolusi vertikal yang lebih besar, kata Magney. “Ini sendiri merupakan salah satu fitur yang lebih penting.”
Diskusi ini membangkitkan kasus Joshua Brown. Sedan Tesla Model S Brown menewaskan pengemudinya, bertabrakan dengan sebuah traktor-trailer yang melintasi jalannya di jalan raya AS 27A di Florida pada Mei 2016. Dilaporkan secara luas bahwa Tesla, yang dilengkapi dengan kamera dan radar 2D tradisional, berasumsi bahwa mobil itu bisa masuk ke bawah rig raksasa, dan melaju langsung ke dalamnya.
Foto menunjukkan sisi kanan semitrailer. Area di oval merah menyoroti kerusakan tabrakan dari Tesla S Joshua Brown (Sumber:Dewan Keselamatan Transportasi Nasional)
Bisakah sensor pencitraan 4D mencegah kecelakaan fatal seperti itu? Magney berkata, “Ya, radar jenis ini tidak akan rentan terhadap kesalahan positif yang berasal dari radar tradisional. Dan itu tidak akan mengizinkan kecelakaan Tesla.”
Transceiver berkinerja lebih tinggi dan pemrosesan radar
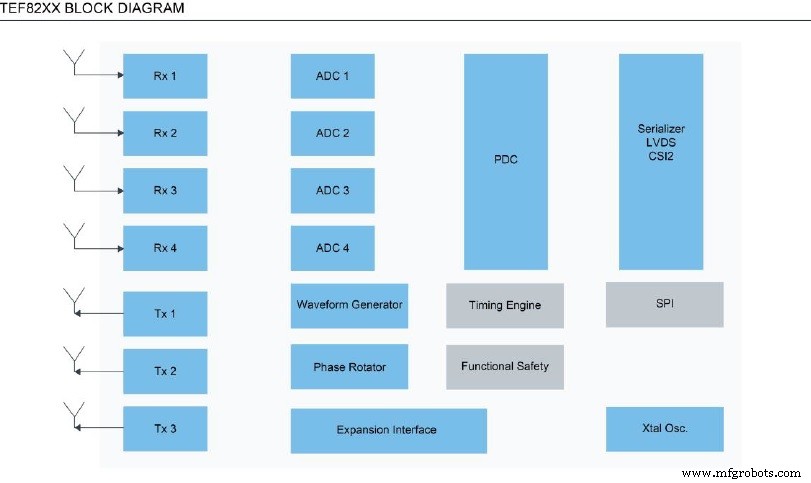
TEF82xx baru NXP – 75mm x 75mm – dibangun di atas RFCMOS generasi kedua berdasarkan teknologi proses 40nm. Perusahaan mengklaim dapat menggandakan kinerja RF untuk penginderaan yang lebih baik, jika dibandingkan dengan versi sebelumnya.
Chip transceiver baru juga menawarkan pengurangan kebisingan fase 4X di sekitar target, sehingga memungkinkan untuk menawarkan pemisahan objek yang lebih baik. Muncul dengan rotator fase 6-bit untuk aplikasi beam steering dan dukungan MIMO modulasi tingkat lanjut.
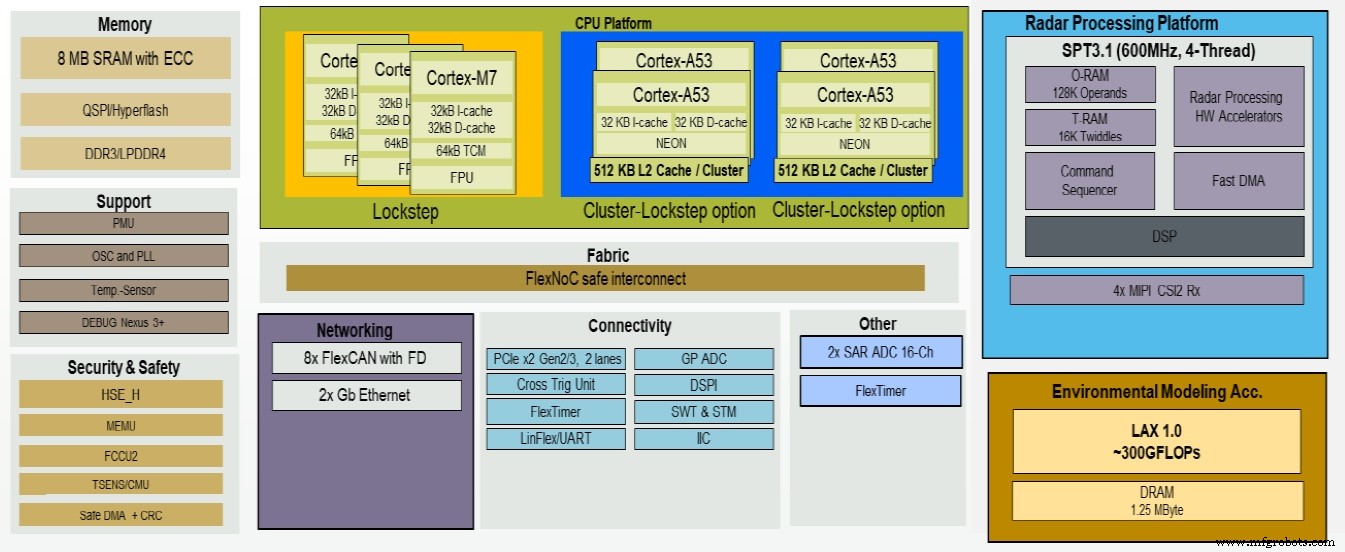
Radar S32R45 baru NXP dibangun di atas proses FinFET 16nm. Ini menawarkan hingga 4X dukungan transceiver kaskade untuk "pemetaan lingkungan yang tepat dan pemahaman pemandangan yang ditingkatkan" di kendaraan L4 dan L5, klaim perusahaan.
klik untuk gambar ukuran penuh Diagram blok S32R45. (Sumber:NXP)
Penting untuk dicatat bahwa S32R45 mampu melakukan akselerasi radar baru. Lebih khusus lagi, ia menawarkan "akselerator radar aljabar linier" baru yang memberikan kinerja hingga 64X dibandingkan dengan inti ARM A53, menurut NXP. Ini berarti menjalankan “algoritma arah kedatangan (DoA) resolusi super dan operasi MIMO yang sebenarnya bahkan dalam kondisi cuaca buruk,” klaim NXP.
Perdebatan baru:lidar vs. radar
NXP mengklaim bahwa radar pencitraan 4D barunya menawarkan resolusi sudut lebih rendah dari 1 derajat. Tapi bagaimana jika dibandingkan dengan lidar?
Lehman mencatat, "Jika Anda berbicara tentang lidar berperforma tinggi - seperti jenis rotasi mekanis yang digunakan oleh Waymo, ia dapat menghasilkan banyak awan titik granular, karena ia menawarkan resolusi sudut yang lebih rendah dari 0,1° atau 0,5°." Dia menambahkan, tetapi lidar semacam itu “besar dan berharga ribuan dolar.”
Magney mengamati, "Ada desas-desus bahwa Tesla sedang mempertimbangkan radar pencitraan untuk platform model 3 dan ini akan menjadi langkah yang baik, karena memberikan jawaban yang lebih baik untuk tidak menggunakan lidar." Pembongkaran System Plus Consulting mengungkapkan bahwa Tesla menggunakan radar 2D Continental, seperti dilansir EE Times .
Namun, menurut Magney, Tesla telah beralih dari Continental ke Bosch untuk jangkauan yang lebih luas. Dia menjelaskan bahwa keduanya adalah radar 2D dengan keterbatasan radar tradisional. “Sejauh yang saya ketahui, langkah ke radar pencitraan oleh Tesla akan cerdik. Pahami bahwa radar pencitraan menghasilkan awan titik. Meskipun resolusinya lebih rendah daripada Lidar, [tetap] ini merupakan peningkatan besar dibandingkan radar tradisional,” kata Magney.
Singkatnya, Magney menekankan, “Saya belum akan melempar lidar ke bawah bus.”
Menurutnya, lidar memiliki keunggulan besar dibandingkan radar sekarang, meskipun celah itu mungkin akan ditutup dengan radar baru. “Salah satu aplikasi utama untuk lidar adalah kemampuannya untuk melakukan lokalisasi relatif terhadap peta dasar. Ini sangat penting untuk robotaxis perkotaan dan angkutan dan menurut saya Anda tidak dapat menggantikan lidar untuk tugas ini.”
Magney menyimpulkan, “Lidar tidak akan hilang bahkan saat radar 4D datang. Alih-alih menggantikan lidar, bisa dibilang radar baru mengatasi beberapa keterbatasan radar tradisional.”
Ketersediaan
Set chip radar baru NXP, pengambilan sampel hari ini, akan diproduksi secara volume pada tahun 2021. Radar sudut, radar depan, dan radar pencitraan 4D akan dirilis selama beberapa bulan pada tahun 2021, tetapi ketiganya akan tersedia pada paruh kedua, kata Lehman. Dia menolak mengomentari harga.
>> Artikel ini awalnya diterbitkan pada situs saudara kami, EE Times.