Blog Tamu — Charles Guan Bersiap (dan Turun) dengan Markforged
Blog tamu ini ditulis oleh Charles Guan, lulusan Teknik Mesin MIT dan mantan instruktur bengkel &desain mesin MIT. Dia juga pembuat robot Overhaul di ABC's BattleBots, yang ditayangkan musim panas ini Kamis jam 8 malam Timur / 7 malam Tengah. Dia bekerja sebagai konsultan teknik dalam robotika dan transportasi, dan disponsori oleh Markforged untuk bersaing di BattleBots. Kunjungi situs webnya dan Equals Zero Robotics.
Beberapa Latar Belakang Robot Tempur

Di dunia pertarungan robot, ada beberapa desain dasar yang cenderung Anda lihat sepanjang waktu – ada baji, sirip, palu, rotor pemintal, dan sebagainya. Seperti Pokemon Legendaris, beberapa desain adalah "cawan suci", jarang terlihat dan bahkan lebih jarang dieksekusi dengan baik di arena. “Flywheel flipper” adalah salah satunya. Biasanya, lengan Anda yang membalik kecepatan tinggi, yang terlihat melemparkan lawan beberapa kaki ke udara, bersifat pneumatik. Tetapi pneumatik, meskipun padat daya, tidak padat energi, dan bahkan sirip terbaik mendapatkan kurang dari selusin bidikan bagus sebelum benar-benar kehabisan bensin. Sirip roda gila listrik menggabungkan kepadatan energi yang tinggi dari baterai dengan ketersediaan daya yang tinggi dari energi kinetik roda gila.
Menyalurkan energi ini ke dalam bentuk yang dapat dilepaskan dengan cepat, namun dapat dikontrol, sulit dipahami. Tantangan desain mencakup mekanisme keterlibatan yang andal, waktu yang konsisten, akselerasi bertahap, dan hubungan yang kuat dengan tujuan bisnis. Rusak salah satu dari ini dan Anda mungkin juga telah membangun sebuah granat energi kinetik.
Hanya beberapa contoh dalam semua sejarah pertempuran robot yang telah dibuat. Di ujung kecil, ada seri robot kelas 3 hingga 30 pon Zac O'Donnell, termasuk botnya Magneato, dan desain Dale Heatherington yang relatif sukses. Untuk bot besar, Warrior adalah tolok ukurnya.

Jika diperhatikan, masing-masing bot ini menggunakan pendekatan desain dan mekanisme final yang berbeda. Hal ini menggambarkan tingkat eksplorasi desain di masyarakat; desain robot cenderung tumbuh sama karena solusi optimal lokal ditemukan oleh pembangun, jadi desain senjata dengan beberapa cara sampai akhir adalah salah satu yang belum dijinakkan.
Selama beberapa tahun sekarang, saya telah mencari solusi koaksial kompak untuk masalah yang dapat dipasang sejajar dengan "roda gila runcing" – drum atau cakram berputar dengan gigi – dan terhubung ke mekanisme di sisi lain robot. Itu membuat robot senjata ganda dengan banyak kemungkinan strategis. Jadi saya pikir saya akan mengambil cuti di antara turnamen BattleBots untuk mengejar ide ini lebih jauh dalam robot kecil seberat 3 pon, menjaga keterampilan desain saya tetap tajam, dan membantu menemukan solusi lain untuk komunitas. Mengapa robot kelas 3lb? Karena ini adalah ukuran yang mudah untuk Anda cetak menggunakan Tanda Dua!

Mendesain Mekanisme Roda Gigi Cetak 3D
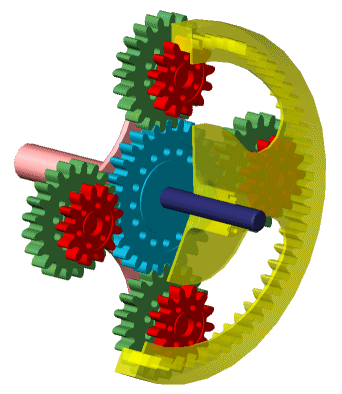
Persyaratannya termasuk mengemas rasio roda gigi yang sangat tinggi (pada urutan 20 atau lebih ke 1) ke dalam volume koaksial dan menemukan cara untuk menggunakan pengurangan roda gigi itu hanya jika diperlukan. Saya menyelidiki sistem roda gigi planet yang dikenal sebagai rangkaian roda gigi episiklik majemuk, mengeluarkan beberapa buku referensi termasuk “Buku Sumber Mekanisme dan Perangkat Mekanik” yang terhormat, dan menjelajahi Internet untuk buku putih desain. Singkatnya, ini memungkinkan pembuatan rasio roda gigi yang sangat tinggi dalam volume yang sama dengan kotak roda gigi planetary sederhana dengan memanfaatkan kecepatan relatif dari dua roda gigi cincin dengan ukuran yang sedikit berbeda.
Setelah tugas singkat merancang cengkeraman anjing geser khusus dan pita gesekan, saya menyadari bahwa saya hanya merekayasa transmisi otomatis saya sendiri. Hal-hal rumit biasanya tidak bertahan lama dalam pertempuran, jadi saya harus memikirkan cara lain untuk menggunakan sistem reduksi gigi ini. Solusinya terletak pada penggunaan gearset sebagai alat pemisah torsi. Anda mungkin tahu ini sebagai "Hybrid Synergy Drive" Toyota atau di bawah sejumlah nama transmisi variabel tak terbatas bermerek dagang lainnya. Penemuan ini terjadi, seperti banyak dalam sejarah, secara tidak sengaja – saya sedang memutar model CAD saya dan menemukan bahwa menambatkan satu ring gear membuat ring gear lainnya tetap berputar, dan sebaliknya. Saya lupa bahwa "kecepatan relatif" berarti salah satu dari kecepatan itu bisa menjadi nol.
Bersemangat, saya dengan cepat membuat model mainan ring gear dan planet gear set, dan mencetaknya menggunakan Onyx pada Mark Two. Onyx adalah satu-satunya bahan yang saya percaya akan cukup kuat dan kaku. Saya terbatas pada ukuran gigi roda gigi yang dapat saya gunakan karena ukuran robot yang kecil; gigi nilon biasa akan terlalu fleksibel. Jadi saya ingin menggunakan model mainan juga sebagai pengukur toleransi untuk produk akhir jika saya harus membuat sedikit perubahan dimensi. Model tersebut mengkonfirmasi hipotesis saya bahwa saya hanya perlu menghentikan satu gigi secara tiba-tiba menggunakan metode apa pun – dengan rem, dengan kopling, atau hanya dengan tongkat melalui jari-jari roda sepeda, dan cincin lainnya dipaksa untuk berputar!

Dipersiapkan Untuk Pertempuran Robot
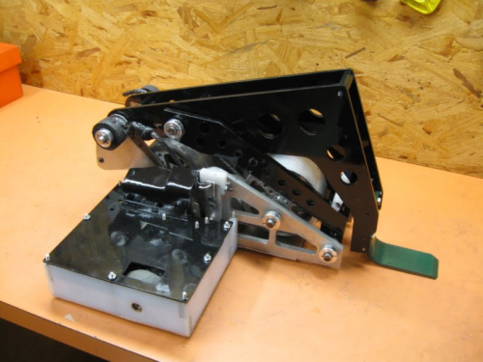
Pengerjaan robot kemudian dimulai dengan sungguh-sungguh. Saya mengeluarkan beberapa sketsa ide saya dari masa lalu dan memutuskan untuk hanya menggunakan model CAD "pertama lulus" untuk mendapatkan konsepnya, dan mengerjakan kebutuhan desain individu dari sana. Untuk mempersingkat cerita, berikut adalah foto desain yang ada sekarang!
Jadi apa yang terjadi di sini? Ia memiliki tubuh segitiga yang dapat dibalik – tidak ada istilah “terbalik” untuk dibicarakan. Benda perak bundar di sebelah kiri adalah rotor aluminium 8 ons dengan baut kepala soket sebagai 'gigi', yang merupakan taktik umum di kelas berat kecil ini untuk senjata pemintalan. Mekanisme planet dimodelkan dalam warna hitam (untuk Onyx), dan motor servo akan mendorong gigi geser ke dalam roda gigi ring berlekuk sesuai perintah, memaksanya untuk berhenti berputar dan roda gigi ring lainnya untuk memulai. Ring gear ini memiliki cam lobe offset dengan batang penghubung ke "butterfly linkage" yang memaksa sayap logam atas dan bawah terpisah saat cam berputar. Sayap logam berengsel pada titik yang sama, sehingga yang satu akan bereaksi terhadap tanah sementara yang lain mengangkat apa pun yang ada di atasnya pada saat itu ke atas.
Ada detail dan masalah geometris yang masih perlu diselesaikan sebelum desain ini selesai, tapi sekarang saya yakin dengan konsepnya. Ini memiliki kelemahan – misalnya, jika gigi geser macet, mekanismenya akan selalu aktif dan bot bisa kehilangan mobilitas. Jika api kering tanpa beban pada sayap, mungkin akan mengirim dirinya sendiri ke atap. Tapi melihat kekurangan desain Anda membuat diri mereka sangat terlihat adalah bagian dari kesenangan olahraga ini, jadi saya berharap untuk melihat apa yang akan terjadi dengan bot ini!
Berikut demo sistemnya:
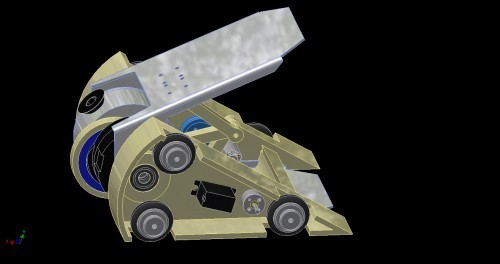
Dan berikut adalah beberapa gambar desain lainnya:


Foto milik Charles Guan.


