Apa itu Pengontrol PID? Jenis, Cara Kerja, dan Aplikasinya
Pengontrol PID – Apa itu dan Bagaimana Cara Kerjanya?
Pengontrol PID adalah algoritma kontrol yang paling umum digunakan dalam otomasi dan aplikasi industri dan lebih dari 95% pengontrol industri adalah tipe PID. Kontroler PID digunakan untuk kontrol yang lebih tepat dan akurat dari berbagai parameter.
Paling sering ini digunakan untuk pengaturan suhu, tekanan, kecepatan, aliran, dan variabel proses lainnya. Karena kinerja yang kuat dan kesederhanaan fungsional, ini telah diterima oleh aplikasi industri yang sangat besar di mana kontrol yang lebih tepat adalah persyaratan utama. Mari kita lihat cara kerja pengontrol PID ?
- Postingan Terkait:Apa itu Sistem Kontrol Terdistribusi (DCS)?

Apa itu Pengontrol PID?
Kombinasi aksi proporsional, integral, dan turunan lebih sering disebut aksi PID dan oleh karena itu namanya, PID (Proportional-Integral-Derivative) pengontrol . Ketiga koefisien dasar tersebut divariasikan pada setiap kontroler PID untuk aplikasi tertentu agar mendapatkan respon yang optimal.
Ini mendapatkan parameter input dari sensor yang disebut sebagai variabel proses aktual. Ia juga menerima keluaran aktuator yang diinginkan, yang disebut sebagai variabel himpunan, dan kemudian menghitung dan menggabungkan respons proporsional, integral, dan turunan untuk menghitung keluaran aktuator.
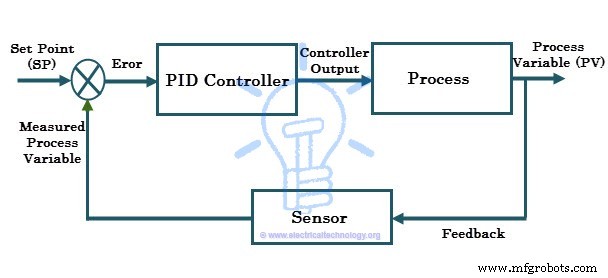
Pertimbangkan sistem kontrol tipikal yang ditunjukkan pada gambar di atas di mana variabel proses dari suatu proses harus dipertahankan pada tingkat tertentu. Asumsikan bahwa variabel proses adalah suhu (dalam celcius). Untuk mengukur variabel proses (yaitu, suhu), sensor digunakan (misalkan RTD).
Titik setel adalah respons yang diinginkan dari proses. Misalkan proses harus dipertahankan pada 80 derajat celcius, dan kemudian titik setelnya adalah 80 derajat celcius. Asumsikan bahwa suhu yang diukur dari sensor adalah 50 derajat celcius, (yang tidak lain adalah variabel proses) tetapi titik setel suhu adalah 80 derajat celcius.
Penyimpangan nilai aktual dari nilai yang diinginkan dalam algoritma kontrol PID menyebabkan output ke aktuator (di sini adalah pemanas) tergantung pada kombinasi proporsional, integral dan tanggapan turunan. Jadi pengontrol PID secara terus menerus memvariasikan output ke aktuator sampai variabel proses menetap ke nilai yang ditetapkan. Ini juga disebut sebagai sistem kontrol umpan balik loop tertutup .
Posting Terkait:
- Apa itu Drive AC? Cara Kerja &Jenis Penggerak Listrik &PKS
- Apa itu Drive DC? Pengoperasian dan Klasifikasi Drive DC
Kerja Kontroler PID
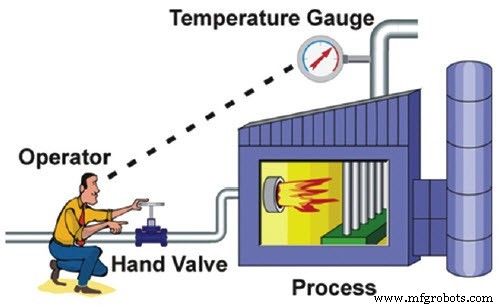
Dalam kontrol manual, operator dapat secara berkala membaca variabel proses (yang harus dikontrol seperti suhu, aliran, kecepatan, dll.) dan menyesuaikan variabel kontrol (yang untuk dimanipulasi untuk membawa variabel kontrol ke batas yang ditentukan seperti elemen pemanas, katup aliran, input motor, dll.). Di sisi lain, dalam kontrol otomatis, pengukuran dan penyesuaian dilakukan secara otomatis secara terus menerus.
Semua pengontrol industri modern adalah tipe otomatis (atau pengontrol loop tertutup), yang biasanya dibuat untuk menghasilkan satu atau kombinasi tindakan kontrol. Tindakan kontrol ini termasuk
- Kontrol ON-OFF
- Pengontrol Proporsional
- Pengontrol Proporsional-Integral
- Pengontrol Turunan Proporsional
- Pengontrol Proporsional-Integral-Derivatif
Dalam kasus pengontrol ON-OFF, dua status dimungkinkan untuk mengontrol variabel yang dimanipulasi, yaitu, sepenuhnya ON (ketika variabel proses di bawah set point) atau Fully OFF ( ketika variabel proses berada di atas set point). Jadi output akan berosilasi di alam. Untuk mencapai kontrol yang tepat, sebagian besar industri menggunakan pengontrol PID (atau PI atau PD tergantung pada aplikasi). Mari kita lihat tindakan kontrol ini.
P-Controller
Kontrol proporsional atau cukup P-controller menghasilkan keluaran kendali yang sebanding dengan kesalahan arus. Di sini kesalahan adalah perbedaan antara titik setel dan variabel proses (yaitu, e =SP – PV). Nilai error ini dikalikan dengan proporsional gain (Kc) menentukan respon output, atau dengan kata lain proporsional gain menentukan rasio proporsional respon output terhadap nilai error.
Misalnya besar error adalah 20 dan Kc adalah 4 maka respon proporsional akan menjadi 80. Jika nilai error adalah nol, output atau respon kontroler akan menjadi nol. Kecepatan respon (respons sementara) ditingkatkan dengan meningkatkan nilai gain proporsional Kc. Namun, jika Kc meningkat melebihi kisaran normal, variabel proses mulai berosilasi pada tingkat yang lebih tinggi dan itu akan menyebabkan ketidakstabilan sistem. 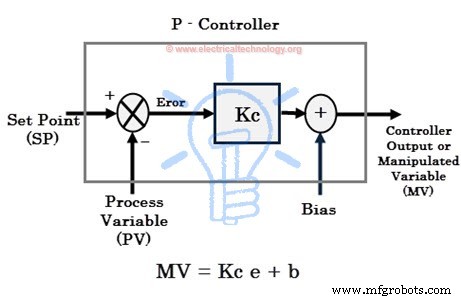
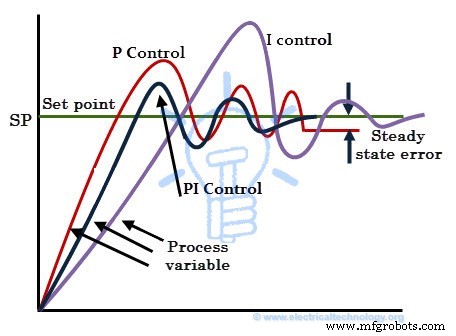
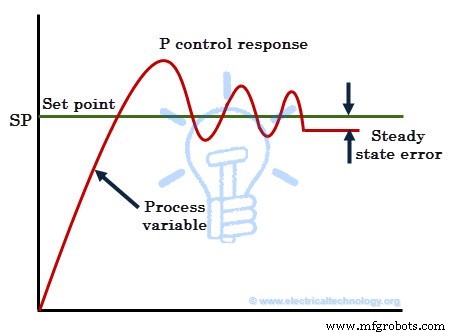 Meskipun P-controller memberikan stabilitas variabel proses dengan kecepatan respon yang baik, akan selalu ada kesalahan antara set point dan variabel proses yang sebenarnya. Sebagian besar kasus, pengontrol ini dilengkapi dengan reset atau biasing manual untuk mengurangi kesalahan saat digunakan sendiri. Namun, keadaan kesalahan nol tidak dapat dicapai oleh pengontrol ini. Oleh karena itu akan selalu ada kesalahan keadaan tunak dalam respons pengontrol-p seperti yang ditunjukkan pada gambar.
Meskipun P-controller memberikan stabilitas variabel proses dengan kecepatan respon yang baik, akan selalu ada kesalahan antara set point dan variabel proses yang sebenarnya. Sebagian besar kasus, pengontrol ini dilengkapi dengan reset atau biasing manual untuk mengurangi kesalahan saat digunakan sendiri. Namun, keadaan kesalahan nol tidak dapat dicapai oleh pengontrol ini. Oleh karena itu akan selalu ada kesalahan keadaan tunak dalam respons pengontrol-p seperti yang ditunjukkan pada gambar.
Pos Terkait:
- Apa itu Otomasi Industri | Jenis Otomasi Industri
- Sistem Otomatisasi Rumah Pintar – Sirkuit dan Kode Sumber
I-Controller
- Pengontrol terintegrasi atau I-controller terutama digunakan untuk mengurangi kesalahan keadaan tunak dari sistem. Komponen integral mengintegrasikan istilah kesalahan selama periode waktu sampai kesalahan menjadi nol. Hal ini mengakibatkan nilai error yang kecil sekalipun akan menghasilkan respon integral yang tinggi. Pada kondisi kesalahan nol, ia menahan output ke perangkat kontrol akhir pada nilai terakhirnya untuk mempertahankan kesalahan keadaan tunak nol, tetapi dalam kasus pengontrol-P, keluarannya nol ketika kesalahannya nol.
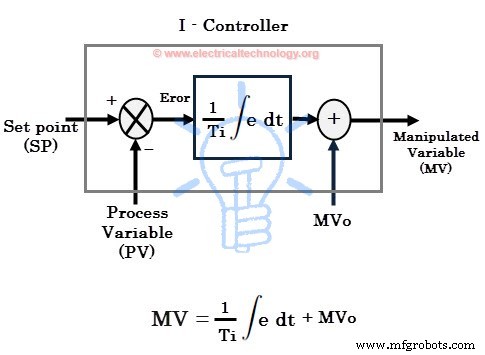
Jika kesalahannya negatif, respons atau keluaran integral akan berkurang. Kecepatan responnya lambat (berarti responnya lambat) ketika I-controller saja yang digunakan, tetapi meningkatkan respon steady state. Dengan mengurangi gain integral Ki, kecepatan respon meningkat.
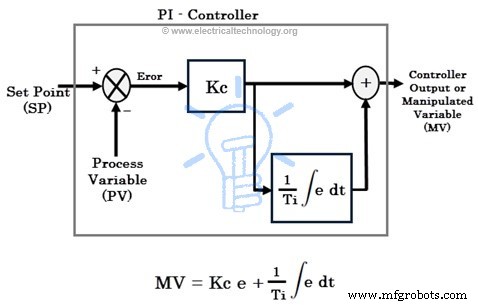
Untuk banyak aplikasi, kontrol proporsional dan integral digabungkan untuk mencapai kecepatan respons yang baik (untuk pengontrol P) dan respons kondisi tunak yang lebih baik (untuk pengontrol I). Paling sering pengontrol PI digunakan dalam operasi industri untuk meningkatkan respon transien serta keadaan tunak. Respons dari hanya kontrol-I, hanya kontrol-p dan kontrol PI ditunjukkan pada gambar di bawah .
Respons D- Controller
Sebuah pengontrol turunan ( atau cukup D-Controller) melihat seberapa cepat variabel proses berubah per satuan waktu dan menghasilkan output yang sebanding dengan laju perubahan. Keluaran turunan sama dengan laju perubahan kesalahan dikalikan dengan konstanta turunan. D-controller digunakan ketika variabel prosesor mulai berubah pada kecepatan tinggi.
Dalam kasus seperti itu, D-controller menggerakkan perangkat kontrol akhir (seperti katup kontrol atau motor) ke arah yang berlawanan dengan perubahan cepat dari variabel proses. Perlu dicatat bahwa D-controller saja tidak dapat digunakan untuk aplikasi kontrol apa pun. 
Tindakan turunan meningkatkan kecepatan respons karena memberikan awal yang baik untuk output, sehingga mengantisipasi perilaku kesalahan di masa mendatang. Semakin cepat D-controller merespon perubahan variabel proses, jika suku turunannya besar (yang dicapai dengan meningkatkan konstanta turunan atau waktu Td).
Di sebagian besar pengontrol PID, respons kontrol-D hanya bergantung pada variabel proses, bukan kesalahan. Ini menghindari lonjakan output (atau peningkatan output yang tiba-tiba) jika terjadi perubahan titik setel yang tiba-tiba oleh operator. Dan juga sebagian besar sistem kontrol menggunakan waktu turunan td yang lebih sedikit, karena respons turunan sangat sensitif terhadap kebisingan dalam variabel proses yang menghasilkan keluaran yang sangat tinggi bahkan untuk sejumlah kecil kebisingan. 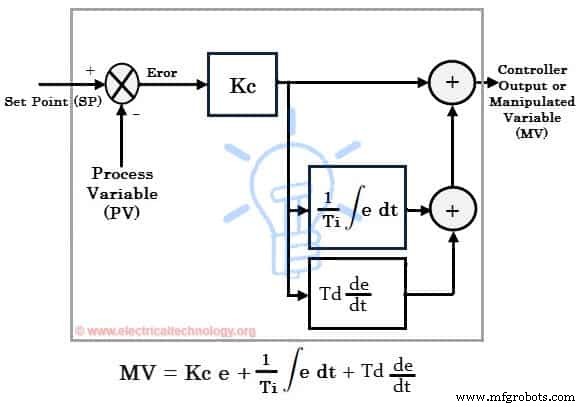
Oleh karena itu, dengan menggabungkan respons kontrol proporsional, integral, dan turunan, terbentuklah kontroler PID. Kontroler PID menemukan aplikasi universal; namun, seseorang harus mengetahui pengaturan PID dan menyetelnya dengan benar untuk menghasilkan keluaran yang diinginkan. Tuning berarti proses mendapatkan respon ideal dari kontroler PID dengan mengatur gain optimal dari parameter proporsional, integral dan turunan. 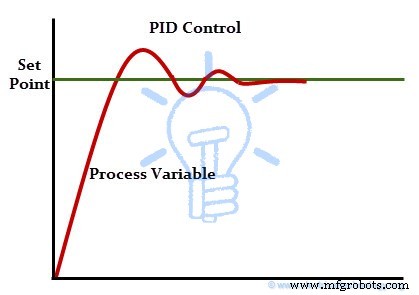
Ada berbagai metode penyetelan pengontrol PID untuk mendapatkan respons yang diinginkan. Beberapa metode tersebut antara lain trial and error, teknik kurva reaksi proses dan metode Zeigler-Nichols. Zeigler-Nichols yang paling populer dan metode coba-coba digunakan.
Ini tentang pengontrol PID dan cara kerjanya. Karena kesederhanaan struktur pengontrol, pengontrol PID dapat diterapkan untuk berbagai proses. Dan juga dapat disetel untuk proses apa pun, bahkan tanpa mengetahui model matematis proses yang terperinci. Beberapa aplikasinya antara lain, kontrol kecepatan motor berbasis kontroler PID, kontrol suhu, kontrol tekanan, kontrol aliran, level cairan, dll.
Pengontrol PID Waktu Nyata
Ada berbagai jenis pengontrol PID yang tersedia di pasar saat ini, yang dapat digunakan untuk semua kebutuhan kontrol industri seperti level, aliran, suhu, dan tekanan. Saat memutuskan untuk mengontrol parameter tersebut untuk suatu proses menggunakan PID, opsinya mencakup penggunaan PLC atau pengontrol PID mandiri.
Pengontrol PID mandiri digunakan di mana satu atau dua loop diperlukan untuk dipantau dan dikendalikan atau dalam situasi di mana sulit diakses dengan sistem yang lebih besar. Perangkat kontrol khusus ini menawarkan berbagai opsi untuk kontrol loop tunggal dan ganda. Pengontrol PID mandiri menawarkan beberapa konfigurasi titik setel dan juga menghasilkan beberapa alarm independen. 
Beberapa pengontrol mandiri ini termasuk pengontrol suhu Yokogava, pengontrol PID Honeywell, pengontrol PID penyetelan otomatis OMEGA, pengontrol PID ABB, dan pengontrol PID Siemens.
Sebagian besar aplikasi kontrol, PLC digunakan sebagai pengontrol PID. Blok PID sudah terpasang di PLC/PAC dan yang menawarkan opsi lanjutan untuk kontrol yang presisi. PLC lebih cerdas dan kuat daripada pengontrol mandiri dan membuat pekerjaan lebih mudah. Setiap PLC memiliki blok PID dalam perangkat lunak pemrogramannya, baik itu PLC Siemens, ABB, AB, Delta, Emersion, atau Yokogava.
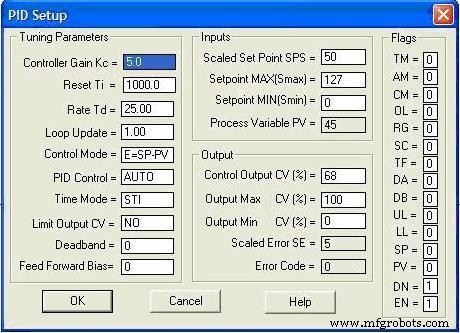
Gambar di bawah menunjukkan blok PID Allen Bradley (AB) dan jendela pengaturannya. 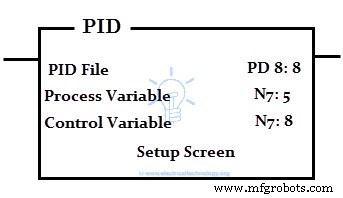
Gambar di bawah menunjukkan blok PID Siemens . 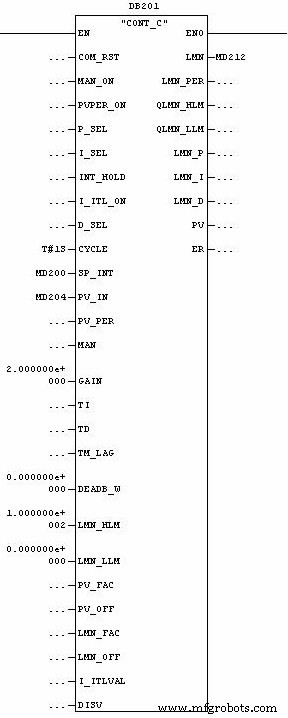
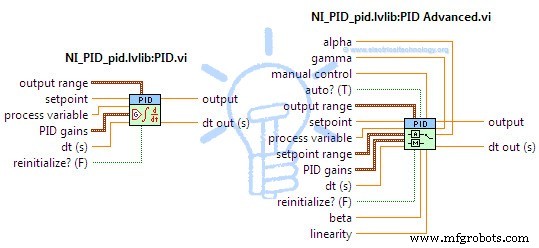
Gambar di bawah menunjukkan pengontrol PID VI yang ditawarkan oleh perangkat PID LabVIEW.