Kontrol Kecepatan Motor DC – Metode Kontrol Tegangan, Rheostatik &Fluks
Metode Kontrol Kecepatan Motor DC – Kontrol Tegangan, Rheostatik &Fluks Motor DC Seri &Shunt
Motor DC digunakan untuk mengubah daya listrik arus searah (DC) menjadi daya mekanik berdasarkan gaya yang dihasilkan oleh medan magnet. Output motor adalah tenaga mekanik dalam hal putaran (kecepatan) poros.
Menurut aplikasi, kita perlu mengubah kecepatan motor. Jadi, perubahan kecepatan yang disengaja dikenal sebagai kontrol kecepatan motor.
Istilah kontrol kecepatan berbeda dengan pengaturan kecepatan. Pengaturan kecepatan berarti bahwa, untuk mempertahankan kecepatan poros konstan terhadap perubahan beban.
- Pos Terkait: Mesin DC – Konstruksi, Pekerjaan, Jenis, dan Aplikasi
Persamaan EMF Motor DC
persamaan EMF motor DC diberikan di bawah ini:
Eb =PΦNZ / 60A
Di mana;
- P =Jumlah tiang
- Ф =Fluks per kutub
- N =Kecepatan motor (RPM)
- Z =Jumlah konduktor
- A =Jumlah jalur paralel
Setelah motor dirancang, Jumlah kutub (P), Jumlah konduktor (Z), dan Jumlah jalur paralel (A) tidak dapat diubah. Jadi, ini adalah besaran tetap.
Eb N
Eb =kΦN
Di mana k =Konstanta proporsionalitas
Untuk motor DC, EMF juga didefinisikan sebagai;
Eb =V – Ia Ra
Di mana;
- V =Tegangan suplai
- Sayaa =Arus jangkar
- Ra =Tahanan jangkar
Sekarang bandingkan kedua persamaan;
kΦN =V – Ia Ra
k =N =V – Ia Ra / kΦ
Dari persamaan di atas, kecepatan motor bergantung pada tegangan suplai (V), Fluks (Φ), dan tahanan jangkar (Ra ).
Oleh karena itu, kecepatan motor DC dapat divariasikan, diubah, dan dikendalikan dengan mengubah;
- Tegangan terminal “V” (AKA Metode Kontrol Tegangan Terapan ).
- Resistensi eksternal dengan resistansi jangkar Ra (AKA Metode Kontrol Reostatik ).
- Fluks per kutub (AKA Metode Kontrol Fluks ).
Di sini, tegangan terminal dan resistansi jangkar dikaitkan dengan rangkaian jangkar dan fluks per kutub dikaitkan dengan rangkaian medan.
Jadi, metode kontrol kecepatan motor DC diklasifikasikan sebagai;
- Metode Kontrol Armature
- Metode Kontrol Lapangan
Sekarang kita membahas cara menerapkan metode ini untuk motor seri, shunt, dan kompon DC.
- Pos Terkait: Motor Servo – Jenis, Konstruksi, Cara Kerja, Kontrol &Aplikasi
Kontrol Kecepatan Motor Seri DC
Kontrol kecepatan motor seri DC dilakukan dengan metode kontrol jangkar dan kontrol medan.
Metode kontrol tahanan jangkar untuk motor seri DC
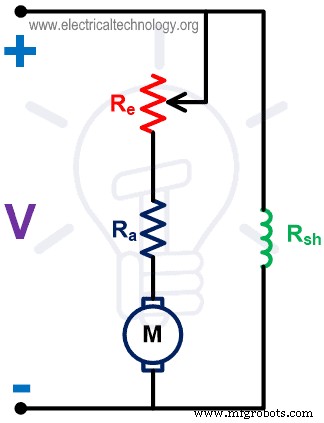
Dalam metode ini, resistor variabel atau rheostat dihubungkan secara seri dengan resistor jangkar. Diagram rangkaian metode ini seperti yang ditunjukkan pada gambar di bawah ini.
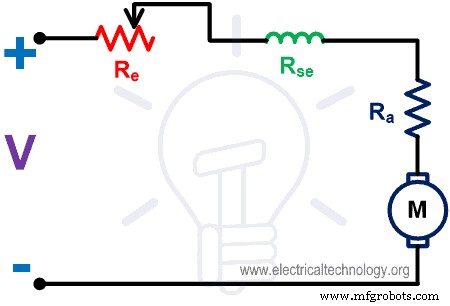
Gambar-1
Pada motor seri, belitan jangkar dihubungkan secara seri dengan belitan medan. Oleh karena itu, arus jangkar dan arus medan adalah sama.
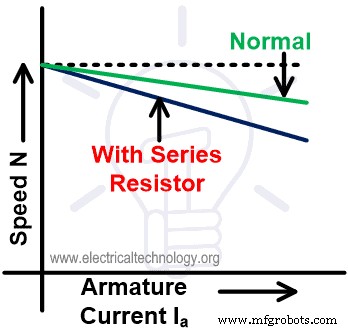
Dengan memvariasikan resistansi jangkar, arus dan tegangan jangkar bervariasi. Jika nilai resistansi eksternal meningkat, tegangan di armature dan arus dari belitan armature berkurang. Dan kecepatannya akan berkurang.
Dengan metode ini, kecepatan motor hanya berkurang dari tingkat kecepatan ketika resistansi eksternal tidak terhubung. Kecepatan motor tidak dapat meningkat dari level ini.
Di sini, resistansi eksternal dihubungkan secara seri dengan angker. Oleh karena itu, arus beban penuh akan mengalir melalui resistor eksternal. Jadi, ia dirancang untuk membawa arus beban penuh secara terus menerus.
Karakteristik kecepatan-arus seperti yang ditunjukkan pada gambar di bawah.
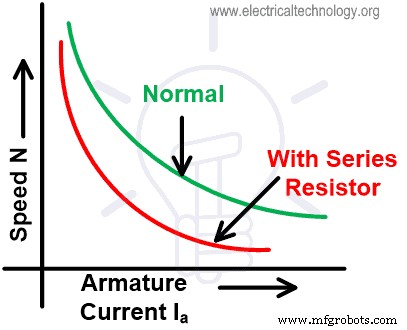
Gbr-2
- Postingan Terkait: Brushless DC Motor (BLDC) – Konstruksi, Prinsip Kerja &Aplikasi
Metode Kontrol Tegangan Armature untuk Motor Seri DC
Dalam metode ini, kecepatan dikendalikan dengan memvariasikan tegangan jangkar (tegangan suplai). Sumber tegangan variabel terpisah diperlukan dalam metode ini.
Kecepatan motor sebanding dengan tegangan suplai. Jadi, jika tegangan meningkat, kecepatan motor akan meningkat dan sebaliknya.
Umumnya, metode ini tidak digunakan. Karena biaya catu daya variabel sangat tinggi. Oleh karena itu, metode ini jarang digunakan untuk kontrol kecepatan.
Metode Kontrol Medan untuk Motor Seri DC
Arus medan sebanding dengan fluks. Dalam metode ini, kecepatan dikendalikan dengan mengendalikan arus medan. Ada dua cara untuk mengontrol arus medan;
- Kontrol Pengalih Lapangan
- Kontrol Berkas yang Disadap
Kontrol Pengalih Terarsip
Dalam metode ini, belitan medan seri dihubungkan secara paralel dengan diverter. Diverter tidak lain adalah resistor variabel. Beberapa bagian dari arus medan akan melewati diverter.
Dari persamaan kecepatan motor, fluks berbanding terbalik dengan kecepatan motor. Jadi, jika fluks berkurang, kecepatan akan meningkat.
Lebih kecil nilai resistansi pengalir dikurangi arus medan dan lebih sedikit fluks yang dihasilkan di dalam motor. Oleh karena itu, kecepatan motor meningkat.
Dalam metode ini, kecepatan dapat ditingkatkan dari kecepatan normal. Diagram rangkaian metode ini seperti yang ditunjukkan pada gambar di bawah ini.
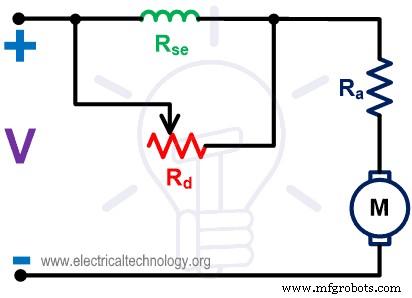
Gbr-3
- Pos Terkait: Motor Stepper – Jenis, Konstruksi, Pengoperasian &Aplikasi
Kontrol Bidang yang Disadap
Ada ketukan pada gulungan bidang untuk memilih jumlah putaran dalam gulungan. Dengan memilih ketukan, arus medan dikontrol.
Untuk jumlah belokan yang lebih banyak, arus yang diajukan lebih besar dan kecepatan lebih sedikit. Untuk jumlah belokan yang lebih sedikit, arus yang diajukan lebih sedikit dan kecepatan jika lebih.
Oleh karena itu, dalam metode ini, kecepatan dapat dikontrol dengan memilih ketukan yang tepat yang disediakan pada gulungan yang diajukan.
Metode ini digunakan dalam traksi listrik untuk kontrol kecepatan penggerak. Diagram rangkaian metode ini seperti yang ditunjukkan pada gambar di bawah ini.
Gbr-4
Kontrol Kecepatan Motor DC Shunt
Metode kontrol kecepatan untuk motor DC Shunt mirip dengan motor seri DC. Kontrol armature dan metode kontrol medan juga berlaku untuk motor shunt DC.
- Postingan Terkait: Perhitungan Ukuran Kabel untuk Motor LT &HT
Metode Kontrol Tahanan Armature untuk Motor DC Shunt
Dalam metode ini, resistansi eksternal ditambahkan ke rangkaian jangkar. Gulungan medan terhubung langsung dengan suplai. Oleh karena itu, arus medan akan tetap sama. Dan juga, fluks akan tetap sama jika resistansi eksternal bervariasi.
Dari persamaan kecepatan, arus jangkar sebanding dengan kecepatan motor. Jika nilai resistansi eksternal meningkat, arus jangkar berkurang. Oleh karena itu, kecepatannya berkurang.
Metode ini digunakan untuk mengontrol kecepatan di bawah nilai normalnya. Kecepatan tidak dapat meningkat lebih dari kecepatan normal. Diagram koneksi dari metode ini seperti yang ditunjukkan pada gambar di bawah ini.
Gbr-5
Karakteristik kecepatan-arus seperti yang ditunjukkan pada gambar di bawah.
Gbr-6
- Postingan Terkait: Motor Induksi Satu Fasa – Konstruksi, Pengerjaan, Jenis &Aplikasi
Metode Kontrol Medan untuk Motor DC Shunt
Dalam motor shunt DC, resistor variabel dihubungkan secara seri dengan belitan medan shunt. Arus medan dapat divariasikan dengan resistor variabel ini. Resistor variabel ini juga dikenal sebagai Pengatur Medan.
Diagram koneksi dari metode ini seperti yang ditunjukkan pada gambar di bawah ini.
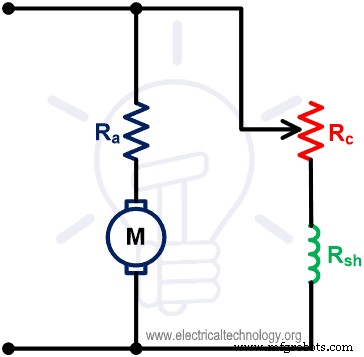
Gbr-7
Dari diagram rangkaian di atas, persamaan arus medan shunt adalah;
Dengan meningkatkan nilai resistansi, arus medan berkurang dan fluks berkurang. Dari persamaan kecepatan, fluks berbanding terbalik dengan kecepatan. Jadi, kecepatan meningkat seiring penurunan fluks.
Jadi, metode ini berlaku untuk mengontrol kecepatan di atas kecepatan normal. Kecepatan tidak dapat dikurangi di bawah kecepatan normal dalam metode ini. Karakteristik kecepatan-arus dari metode ini adalah seperti yang ditunjukkan pada gambar di bawah ini.
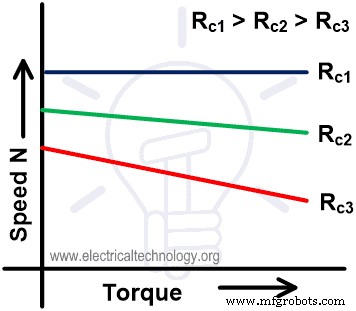
Gbr-8
- Postingan Terkait: Motor Induksi Tiga Fasa – Konstruksi, Pengerjaan, Jenis &Aplikasi
Metode Kontrol Tegangan Armature untuk Motor DC Shunt
Dalam metode ini, gulungan medan disuplai oleh suplai konstan. Tetapi belitan jangkar disuplai oleh sumber DC variabel yang terpisah.
Metode ini juga dikenal sebagai metode Ward-Leonard . Diagram koneksi dari metode ini adalah seperti yang ditunjukkan pada gambar di bawah ini. 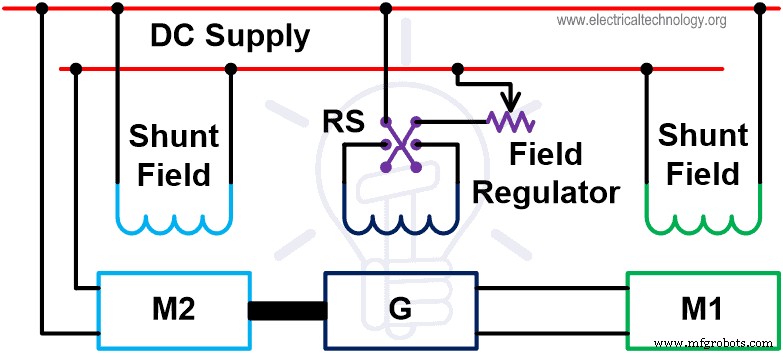
Gbr-9
Dari diagram di atas, kita mengontrol kecepatan motor M1. Motor ini ditenagai oleh generator G.
Gulungan medan shunt terhubung dengan suplai DC. Generator G digerakkan oleh motor M2. Motor M2 adalah motor kecepatan konstan dan disuplai dari suplai DC.
Motor M1 mulai berputar ketika tegangan output generator G diumpankan ke motor. Kecepatan motor dapat dikontrol dengan mengontrol tegangan output generator G.
Regulator yang diajukan terhubung melintasi generator dengan jalur suplai DC untuk mengontrol eksitasi yang diajukan.
Dengan mengontrol tegangan eksitasi generator, tegangan output generator dikendalikan. Dan tegangan ini akan mengontrol kecepatan motor M1.
Switch RS adalah Reverse Switch. Sakelar ini digunakan untuk mengaktifkan terminal eksitasi medan. Karena itu, arus eksitasi akan terbalik, dan akan menghasilkan tegangan yang berlawanan.
Jadi, tegangan berlawanan ini akan membalikkan kecepatan motor M1. Oleh karena itu, dengan metode ini, motor dapat berjalan di kedua arah. Dan kecepatan dapat dikontrol di kedua sisi arah rotasi.
- Postingan Terkait:Apa itu Efisiensi Motor dan Bagaimana Meningkatkannya?
Kelebihan &Kekurangan Metode Ward Leonard
Kelebihan Metode Ward Leonard
Kelebihan metode ini dirangkum di bawah ini;
- Kecepatan motor dapat dikontrol dalam rentang yang luas.
- Pengoperasian motor sangat halus.
- Pengaturan kecepatan motornya bagus.
- Motor dapat berjalan dengan akselerasi seragam.
- Ia memiliki kapasitas putus yang melekat.
- Mudah untuk membalikkan arah rotasi dan kecepatan dapat dikontrol di kedua arah.
Kekurangan Metode Ward Leonard
Kelemahan metode ini dirangkum di bawah ini;
- Perlu dua mesin tambahan (set motor-generator) dengan rating motor utama yang sama. Oleh karena itu, biaya keseluruhan pengaturan ini sangat tinggi.
- Ini menghasilkan lebih banyak suara.
- Perlu perawatan yang sering.
- Pengaturan ini membutuhkan lebih banyak ruang untuk dipasang.
- Efisiensi keseluruhan rendah jika motor berjalan dengan kondisi beban ringan untuk jangka waktu yang lama.
Penerapan Metode Ward Leonard
This method is used where the motor to be controlled over a wide speed range. The application of the motor is very sensitive to speed, in this condition this method is very useful.
This method is used in the application like; cranes, excavator, elevator, mine hoists, paper machine, steel rolling mills, etc.


