

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
 |
| |||
|
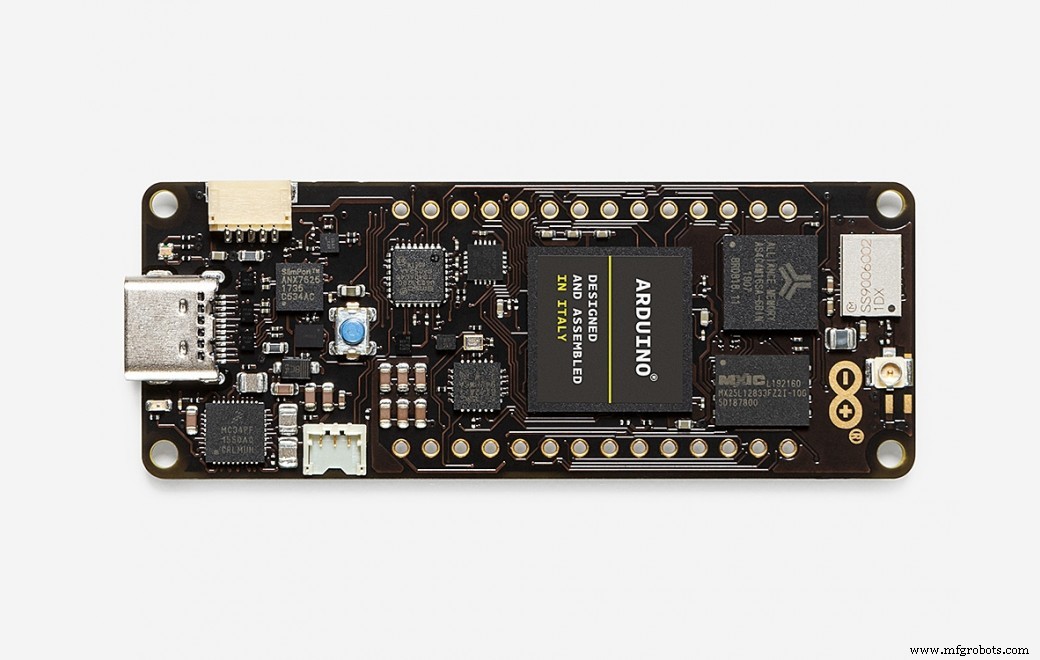
Arduino Portenta H7 menawarkan berbagai macam fitur, dan kemampuan untuk menjalankan kode Anda pada dua inti terpisah, yang juga dapat berkomunikasi satu sama lain!
Kami semua mengalami masalah dengan proyek kami dari waktu ke waktu, jadi di sini kami menunjukkan bagaimana Anda dapat menggunakan Segger JLink untuk men-debug kode yang berjalan pada kedua inti, pada saat yang sama!
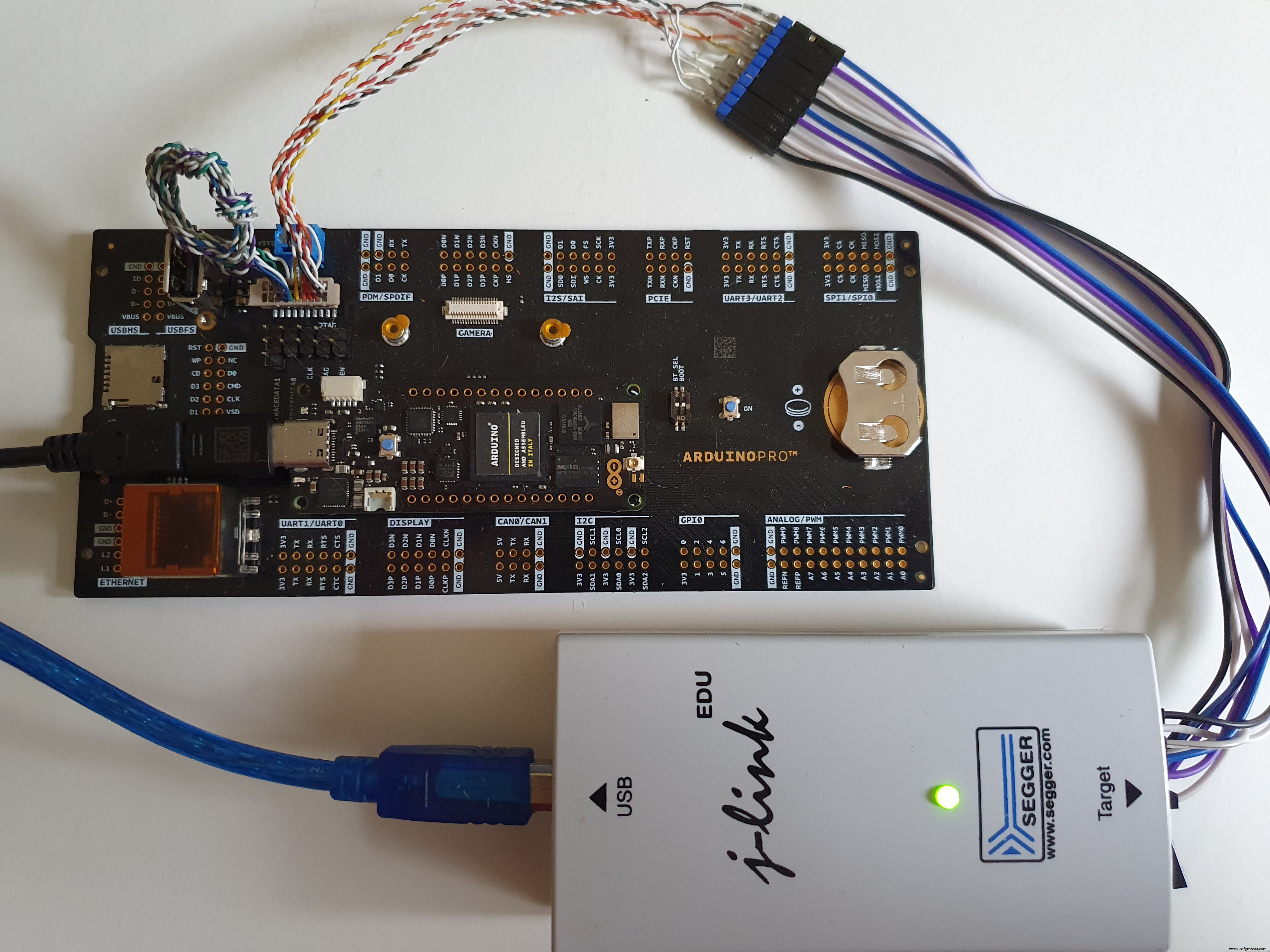
Penyiapan Perangkat Keras
Setelah Portenta H7 Anda terpasang pada papan breakout, Anda perlu menghubungkan konverter 20-pin MIPS Anda untuk melepaskan pin debugging.
Kemudian Anda dapat menghubungkan konverter Anda ke Segger J-Link seperti yang ditunjukkan pada gambar di bawah ini.
Jika Anda memiliki konektor pitch yang tepat (0,05"), Anda juga dapat memasang konektor Anda sendiri seperti yang ditunjukkan pada gambar kedua:

Pengaturan Perangkat Lunak
Kami berasumsi bahwa Anda telah menginstal Arduino IDE di komputer Anda (jika belum unduh di sini).
Kemudian instal Visual Studio (2017/2019/2022), dan Visual Micro Extension, dengan petunjuk lengkap tersedia di sini.
Anda juga perlu menginstal Board Package untuk Arduino Mbed OS Portenta Boards dari Visual Micro Explorer (atau dari Boards Manager di Arduino IDE).
Anda perlu mengganti Driver USB pada Antarmuka 0 Segger J-Link Anda menggunakan alat Zadig.exe (lihat video di bagian bawah untuk panduannya).
Ayo Kode!
Sekarang kita perlu menyiapkan proyek terpisah, satu untuk setiap inti dari Portenta Board kita. Kode terlampir adalah contoh Blink sederhana, di mana setiap inti mengedipkan LED berwarna berbeda. Untuk debugging, siapkan setiap inti dalam instance terpisah dari Visual Studio.
Jangan lupa untuk memastikan Anda memanggil fungsi bootM4() pada proyek M7 Core Anda untuk memastikan kedua inti berjalan.
Pengaturan Debug:M7 Core
Buka M7 Core Sketch Anda dan pilih Debug> Hardware, dan Segger J-Link Debugger (BUKAN "versi NoOpenOCD)

Bangun dan unggah Sketsa M7 Anda ke inti M7 saat ini.
Pengaturan Perangkat Lunak:M4 Core
Buka Sketch Anda dan pilih Debug> Hardware, dan Segger J-Link Debugger (NoOpenOCD)
Bangun dan unggah Sketsa M4 Anda ke inti M4 saat ini.
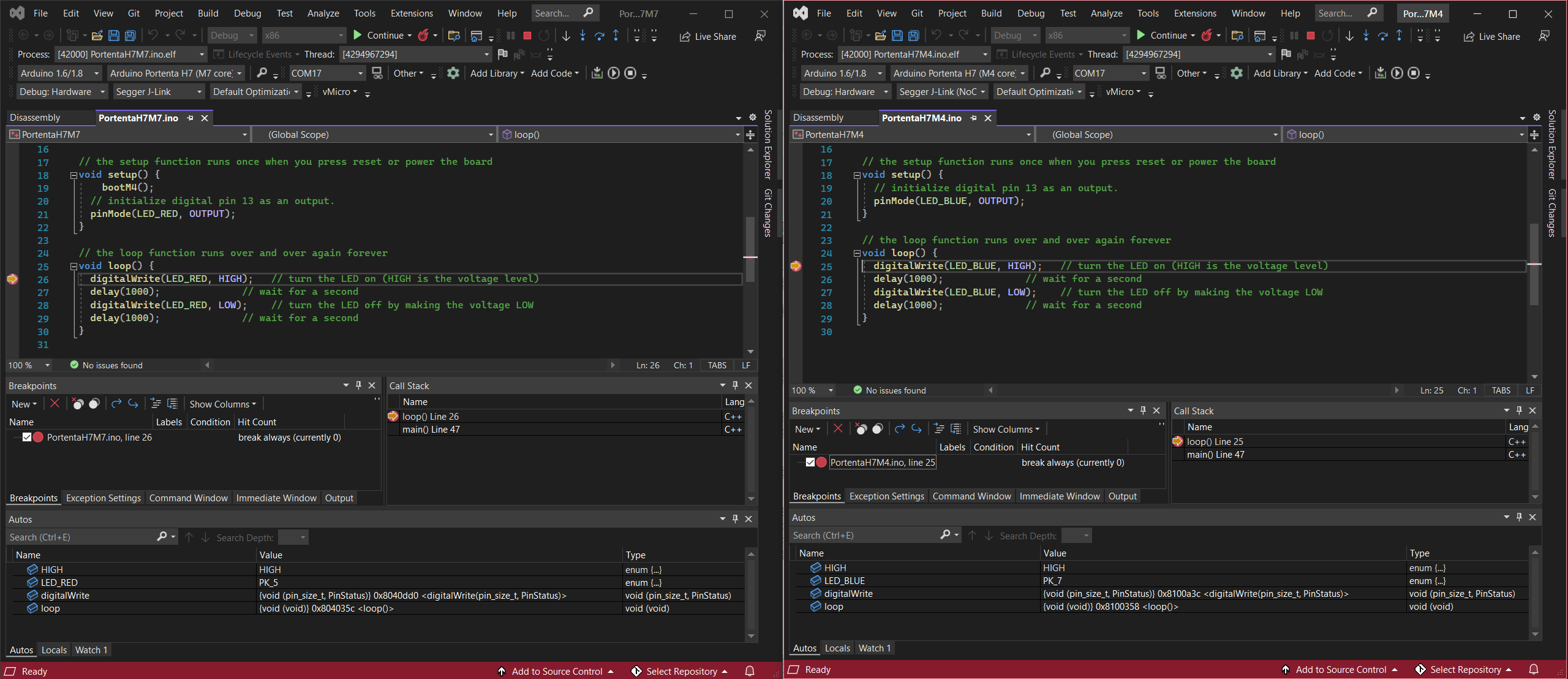
Mulai Debugger
Pertama, mulai debugging menggunakan sketsa M7 Core dengan menggunakan "Debug> Attach to Process".
Kemudian mulai debugging menggunakan sketsa M4 Core dengan menggunakan "Debug> Attach to Process".
Anda sekarang harus dapat menambahkan breakpoint ke salah satu sketsa, dan melihat debugger berhenti di atasnya..... dengan setiap inti dapat berhenti/melangkah/melanjutkan secara independen!!
Video Panduan
Lihat panduan untuk proses ini di YouTube....
Tautan Berguna
Dokumentasi + Diagram Pengkabelan
Papan Breakout Portenta
Segger JLink
// Kode untuk Menunjukkan Berkedip pada Portenta M4 Core// fungsi setup berjalan satu kali ketika Anda menekan reset atau menyalakan boardvoid setup() { // menginisialisasi pin digital 13 sebagai keluaran. pinMode(LED_BLUE, OUTPUT);}// fungsi loop berjalan berulang-ulang selamanyavoid loop() { digitalWrite(LED_BLUE, HIGH); // nyalakan LED (TINGGI adalah level tegangan) delay(1000); // tunggu digitalWrite kedua(LED_BLUE, LOW); // matikan LED dengan membuat tegangan LOW delay(1000); // tunggu sebentar} // Kode untuk Menunjukkan Berkedip pada Portenta M7 Core// fungsi setup berjalan satu kali ketika Anda menekan reset atau menyalakan boardvoid setup() { bootM4(); // inisialisasi pin digital 13 sebagai output. pinMode(LED_RED, OUTPUT);}// fungsi loop berjalan berulang-ulang selamanyavoid loop() { digitalWrite(LED_RED, HIGH); // nyalakan LED (TINGGI adalah level tegangan) delay(1000); // tunggu digitalWrite kedua(LED_RED, LOW); // matikan LED dengan membuat tegangan LOW delay(1000); // tunggu sebentar} 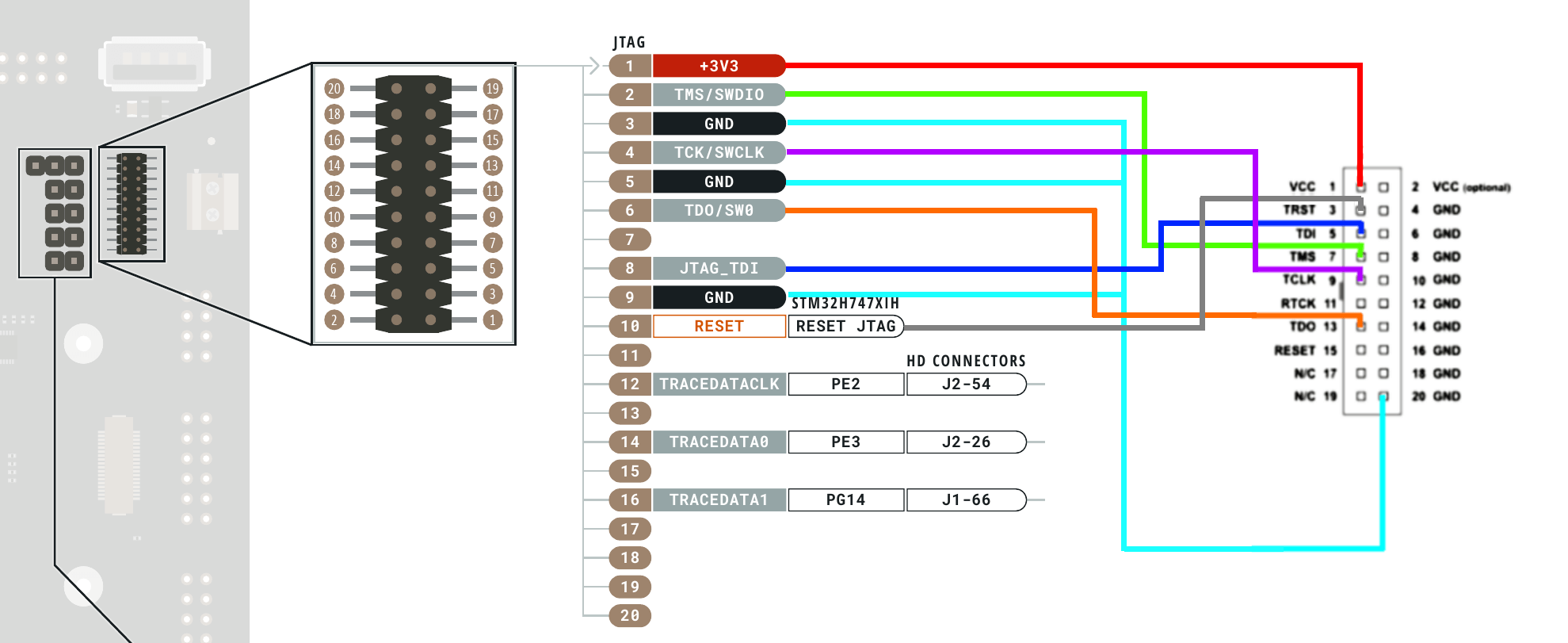
Proses manufaktur
Komponen dan persediaan Arduino UNO × 1 Sensor Pencari Jangkauan ToF SparkFun - VL6180 VL53L0X untuk jarak jauh dan VL6180X untuk jarak dekat. disini saya menggunakan VL6180X × 1 motor servo × 1 Aplikasi dan layanan online Arduino IDE Memproses
Komponen dan persediaan Arduino MKR1000 × 1 Klik Lingkungan MikroE × 1 Alat dan mesin yang diperlukan Kabel jumper Adafruit Wanita/Wanita Aplikasi dan layanan online Arduino IDE WolkAbout IoT Platform Tentang proyek ini
Komponen dan persediaan Arduino UNO × 1 Sensor Kedekatan × 1 Kabel jumper (generik) × 1 Tentang proyek ini Halo, teman-teman! Hari ini saya akan menunjukkan kepada Anda bagaimana menghubungkan sensor IR dengan Arduino UNO. Jadi mari kita mulai! Komp
Komponen dan persediaan Arduino MKR GSM 1400 × 1 Kabel Micro-USB ke USB (Generik) × 1 Baterai Lipo 3,7V × 1 Kartu SIM mikro × 1 Antena UF.L Seluler × 1 Aplikasi dan layanan online Arduino IDE Google Cloud IoT Core T