Tentang proyek ini
Pernahkah Anda bertanya-tanya bagaimana robot mewah yang mengangkut suku cadang di jalur perakitan bekerja? Saya melihat robot seperti itu di pabrik Opel di Polandia, saya mengajukan banyak pertanyaan dan mereka menjelaskan kepada saya cara kerjanya, saya langsung mengerti bahwa ini hanyalah pengikut garis yang sangat maju. Alih-alih pita hitam ada strip magnetik dan alih-alih sensor cahaya ada sensor magnetik, ada juga banyak fitur keselamatan dan hal-hal pintar lainnya. Tetapi pada titik ini saya mulai berpikir bahwa mungkin saya dapat membuat robot versi saya sendiri yang lebih kecil, lebih murah, berbasis Arduino dan open source yang akan dapat mengangkut barang-barang dengan cerdas? Kedengarannya seperti tantangan besar, itulah yang saya suka!
Desain
Hal pertama yang pertama saya rancang ... di atas kertas! Ya di atas kertas dengan pensil di tangan saya :) Mengapa mendesain di atas kertas jika Anda memiliki perangkat lunak CAD yang luar biasa? Ada beberapa keuntungan yang saya dengar dari orang lain dan kemudian saya konfirmasi sendiri. Anda benar-benar bebas, tidak ada batasan pada kertas, tidak ada gangguan hanya ruang kosong dan pensil yang membuat segalanya menjadi sangat mudah. Ini juga lebih cepat Anda tidak perlu khawatir tentang dimensi dan bentuk akhir jika Anda tidak menyukai sesuatu yang Anda gambar Anda bisa menggambarnya lagi dan ketika Anda melihat semua gambar Anda sekaligus Anda bisa menggabungkannya dan muncul dengan ide-ide baru :) Sangat mudah untuk menggambarnya di atas kertas untuk menemukan bentuk keseluruhan yang saya suka dan kemudian melompat ke CAD untuk menambahkan beberapa dimensi pada gambar saya. Sangat merekomendasikan teknik ini kepada semua orang! Ini gambar saya (garis warna-warni di sebelah kanan adalah kreativitas anak saudara saya)
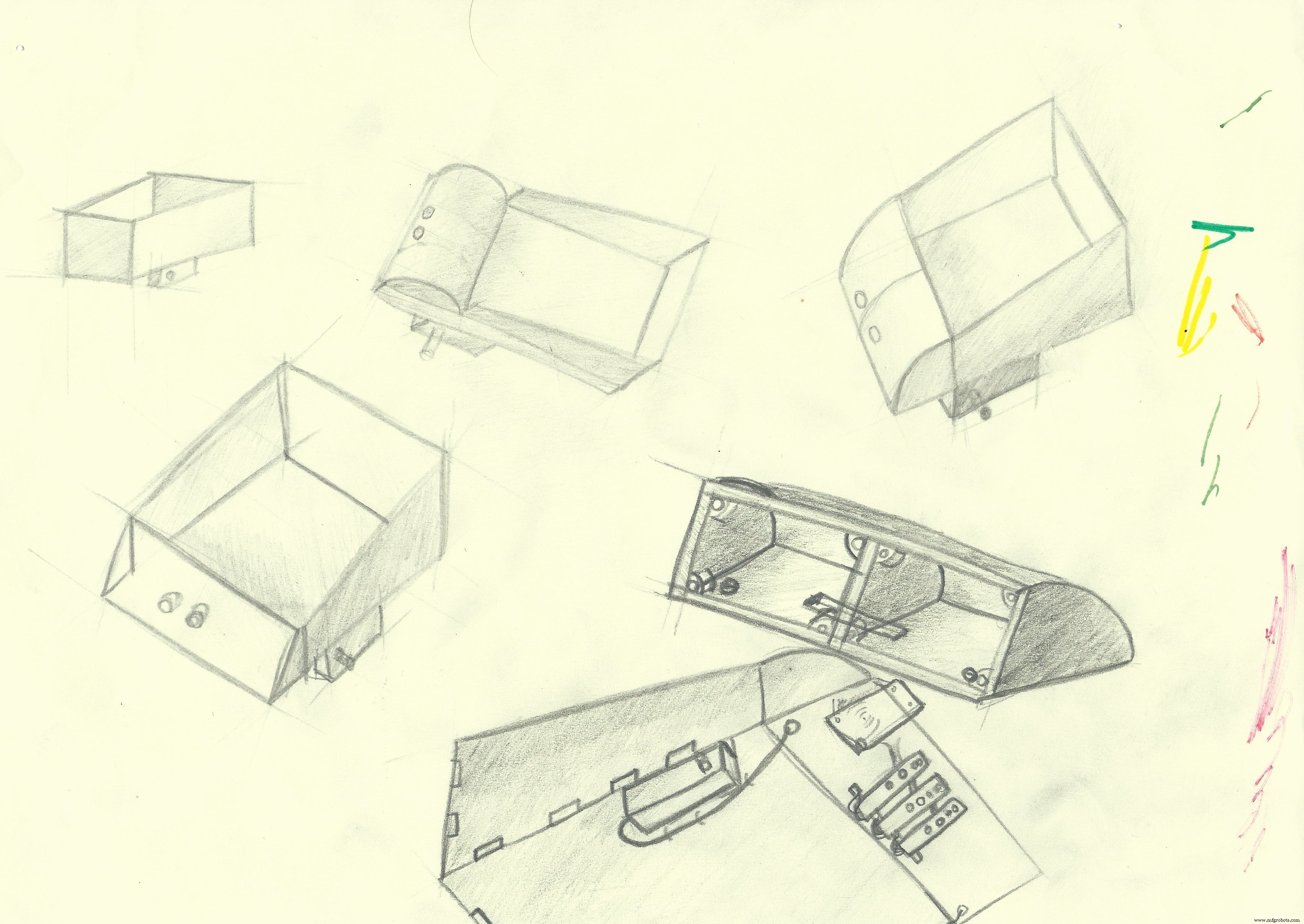
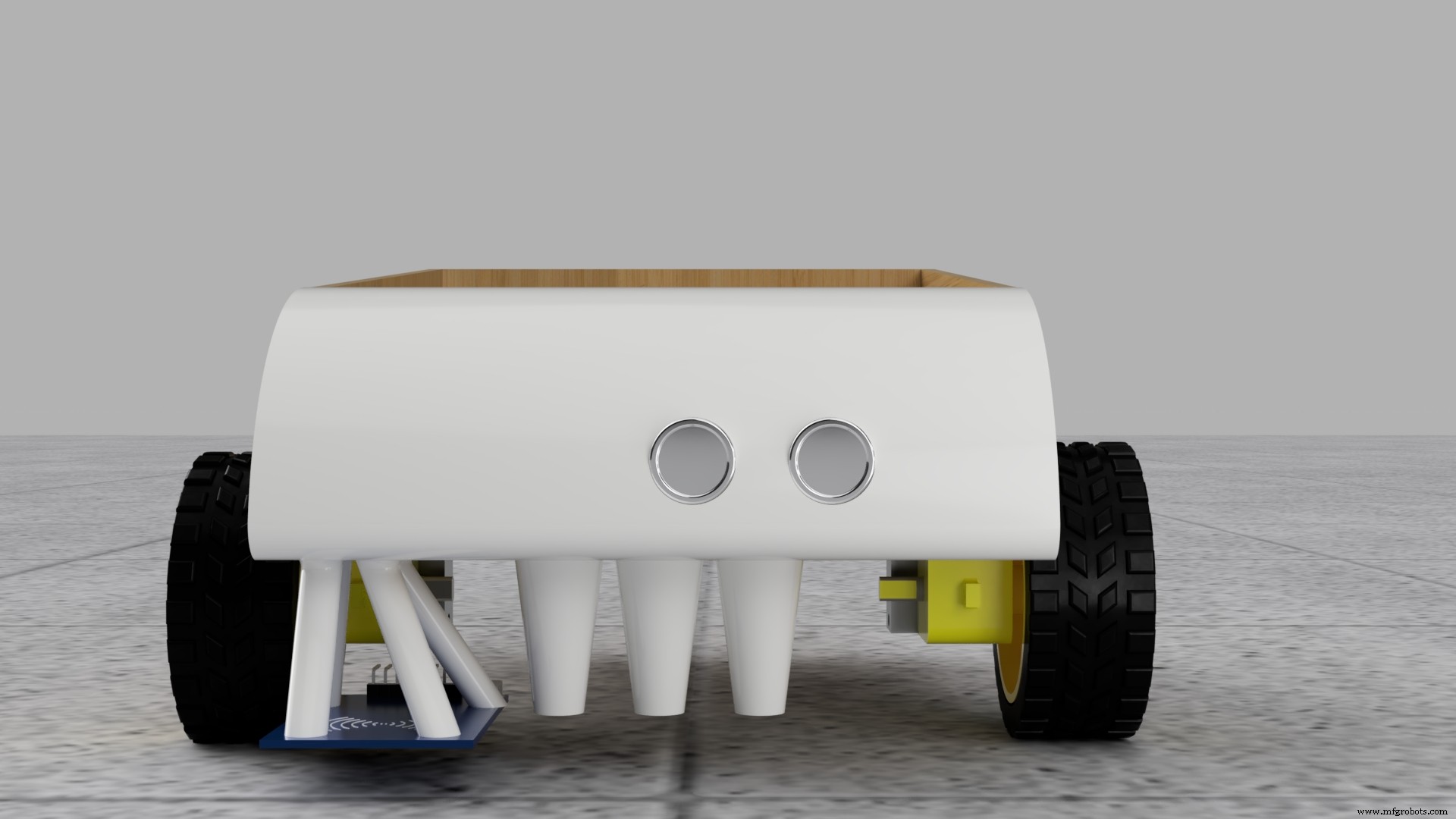
Tentu saja, gambar saya tidak terlalu bagus, dan jika Anda bisa menggambar, Anda akan membuat sesuatu yang lebih baik dalam 5 menit tetapi saya dulu sangat buruk dalam menggambar dan contoh di atas terlihat menjanjikan bagi saya. Kemudian saya membuat desain CAD berdasarkan gambar itu. Saya tahu sejak awal bahwa beberapa bagian dari robot ini akan dicetak 3D, tetapi saya tidak ingin membuatnya 100% dicetak 3D dan saya ingin bereksperimen dan mencoba hal-hal baru (seperti biasa). Akhirnya, saya memutuskan untuk memotong beberapa bagian pada pemotong laser, tetapi saya tidak memilikinya dan saya tidak pernah mendesain sesuatu untuk pemotongan laser, mempelajari cara melakukannya dan memesannya secara online. Sebagai bahan, saya memilih kayu lapis 4mm (Anda juga dapat menggunakan plexi atau yang serupa). Bagian depan robot dicetak 3D dan menampung semua sensor, elektronik, dan baterai. Berikut adalah render dari desain saya yang menurut saya terlihat fantastis!

Langkah selanjutnya adalah memesan pemotongan laser dari pelat kayu itu, saya dari Polandia jadi saya menemukan perusahaan Polandia yang melakukan itu untuk menghemat pengiriman. Jika Anda ingin menemukan sesuatu di sekitar Anda, cukup potong laser Google dan nama kota Anda, Anda harus dengan mudah menemukan sesuatu di sekitar Anda. Ingatlah untuk bertanya kepada perusahaan apakah mereka dapat menyesuaikan offset untuk bagian-bagian itu sehingga sambungan jari akan pas dengan sempurna (kami harus melakukan itu karena sesuatu yang disebut garitan, Anda dapat membaca lebih lanjut tentang itu di sini). Untungnya, saya menemukan perusahaan yang menangani itu untuk saya, terima kasih!
Saya cukup takut karena saya tidak pernah mendesain untuk pemotongan laser dan saya tidak pernah menggunakan bagian pemotongan laser sebelumnya tetapi ternyata hasilnya bagus :) File DXF untuk pemotongan laser dapat ditemukan di bawah pada bagian lampiran.
Untuk menyelesaikan chasis saya harus mencetak bagian depan pada printer 3D, itu alat yang saya miliki sehingga tidak masalah bagi saya, jika Anda belum memiliki printer 3D, pertimbangkan untuk membeli satu, mereka cukup murah saat ini. Anda mungkin dapat menemukannya di sekolah atau perpustakaan, atau mungkin salah satu teman Anda adalah penggemar pencetakan 3D. File STL dapat ditemukan di bagian lampiran di bawah ini. Tidak ada pengaturan khusus untuk pencetakan 3D, saya menggunakan 2 perimeter dengan isi 30% dan tinggi lapisan 0.2mm, Anda harus menggunakan dukungan untuk mencetak bagian ini. Ini akan memakan waktu sekitar 8 jam jadi bersabarlah.
Setelah cetakan Anda selesai, Anda dapat membersihkannya dan memasang sekrup ke bagian-bagian kayu lapis, tetapi saya memutuskan untuk mengerjakannya lagi. Sekali lagi itu sesuatu yang belum pernah saya lakukan sebelumnya, saya mengampelas cetakan saya dan mengecatnya, mengampelas lagi dan mengecatnya kemudian saya menggunakan pengisi mobil untuk membuat permukaannya sempurna, lalu beberapa pengamplasan dan pengecatan lagi. Butuh banyak waktu, tetapi saya juga belajar banyak, dan lihat saja permukaan yang mengkilap ini! Ini sempurna, Anda tidak dapat mengatakan bahwa itu dicetak 3D sama sekali! 2 hari pengecatan dan pengamplasan, pasti worth it.
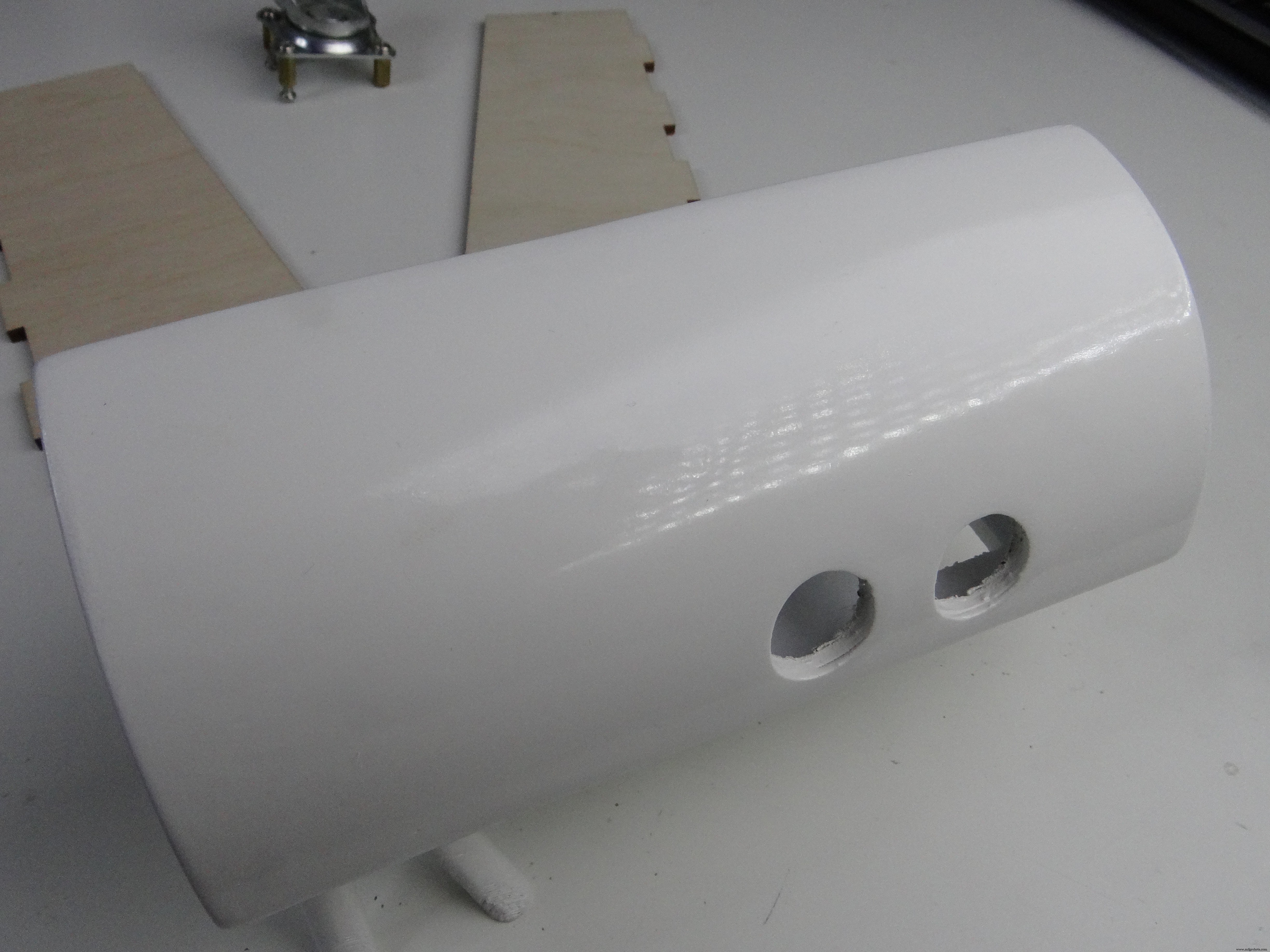
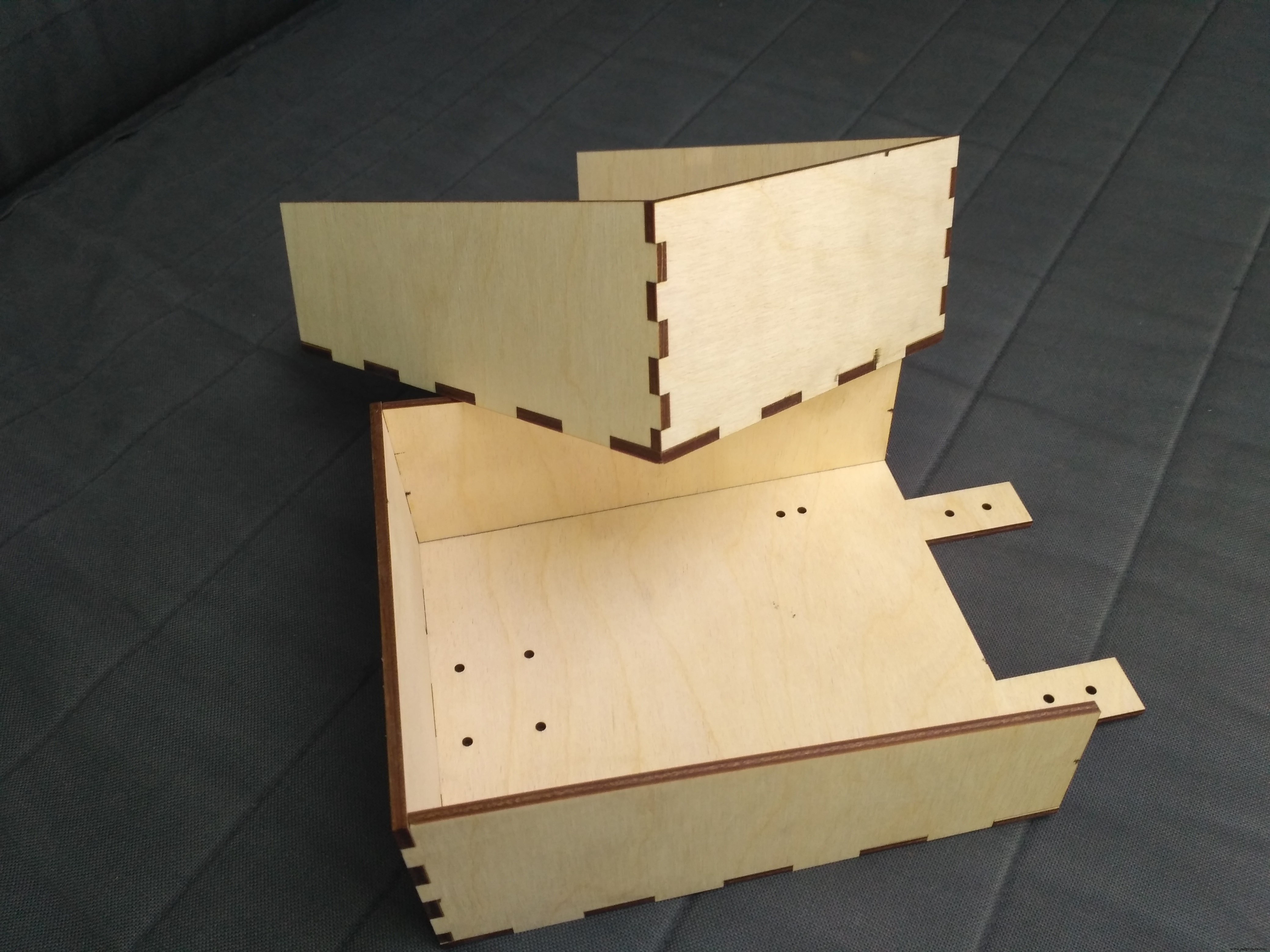
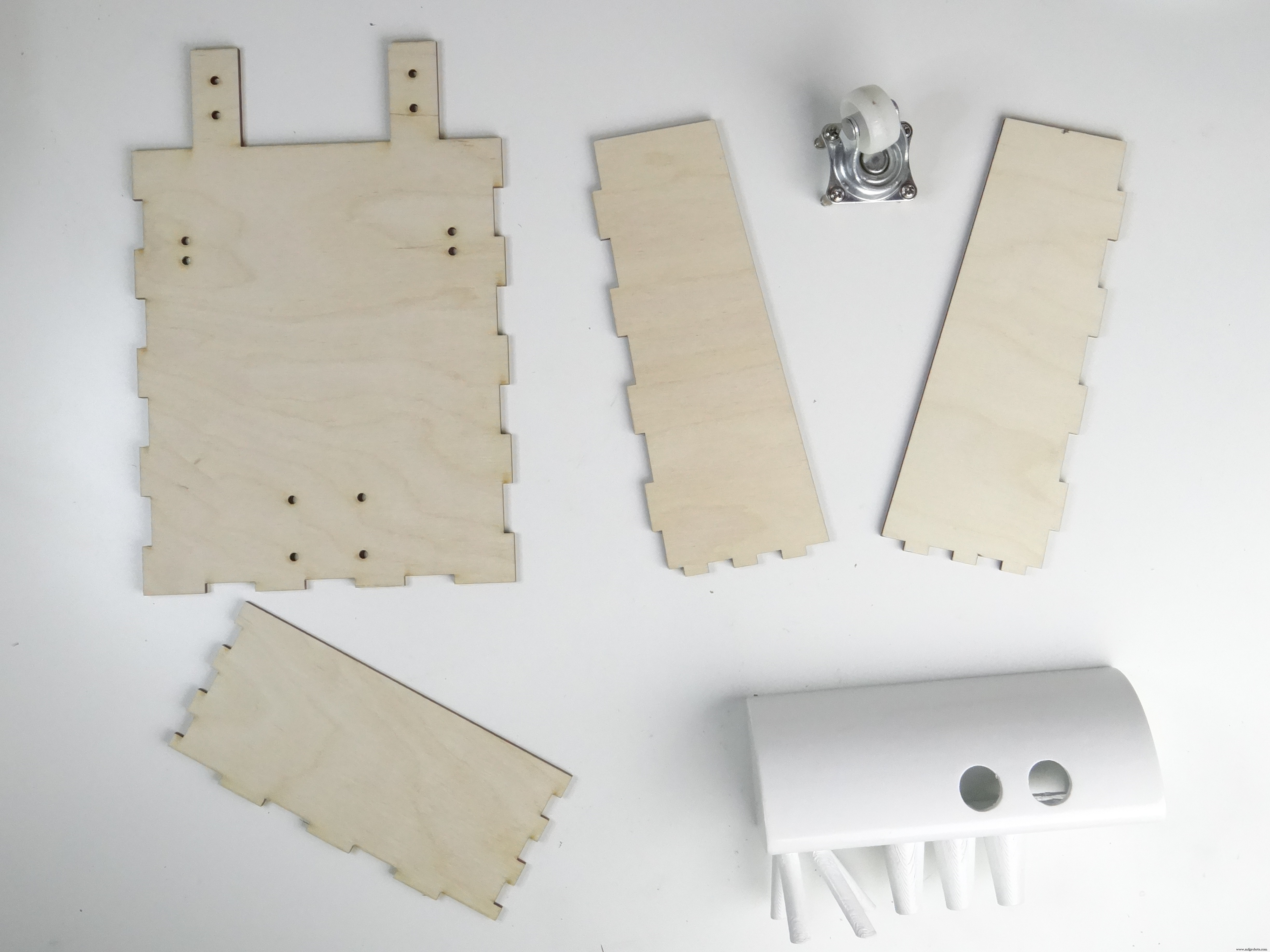
Dan berikut adalah bagian yang dipotong laser dan bagian cetak 3D yang disiapkan untuk dirakit.
Arduino, Sensor, Motor, PCB...
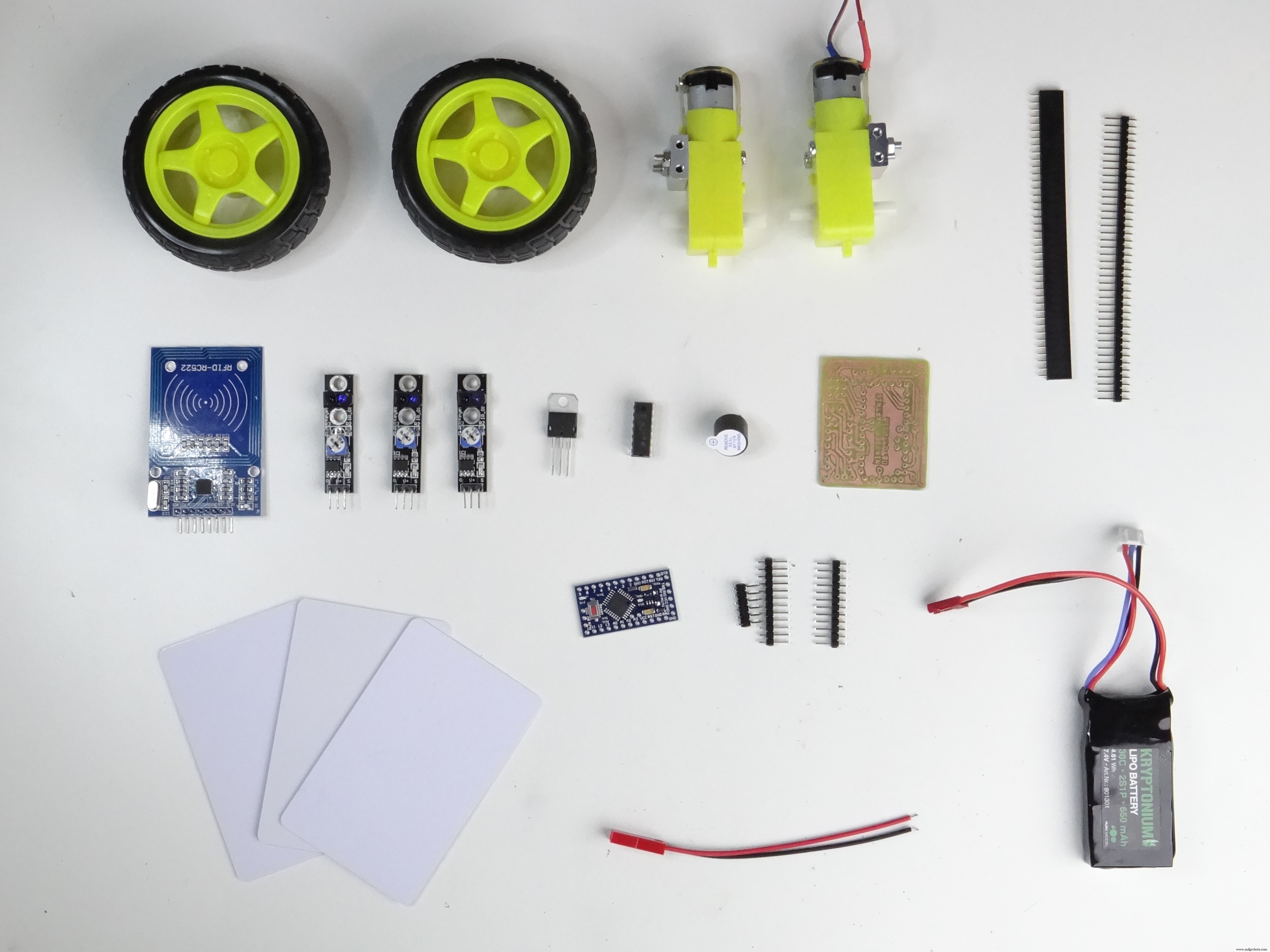
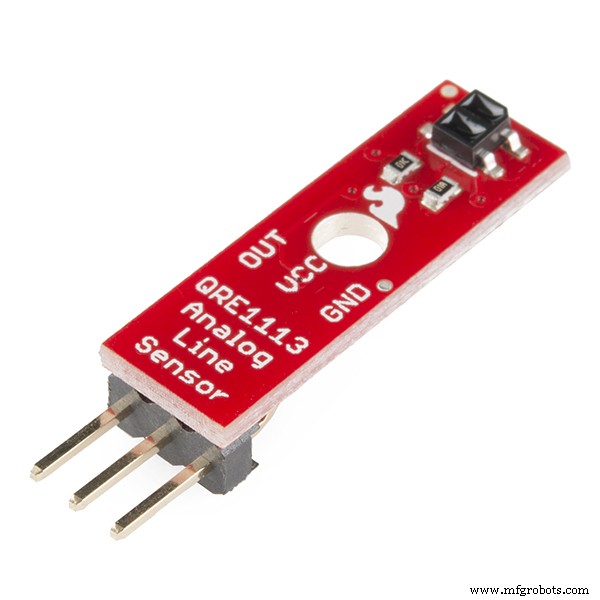
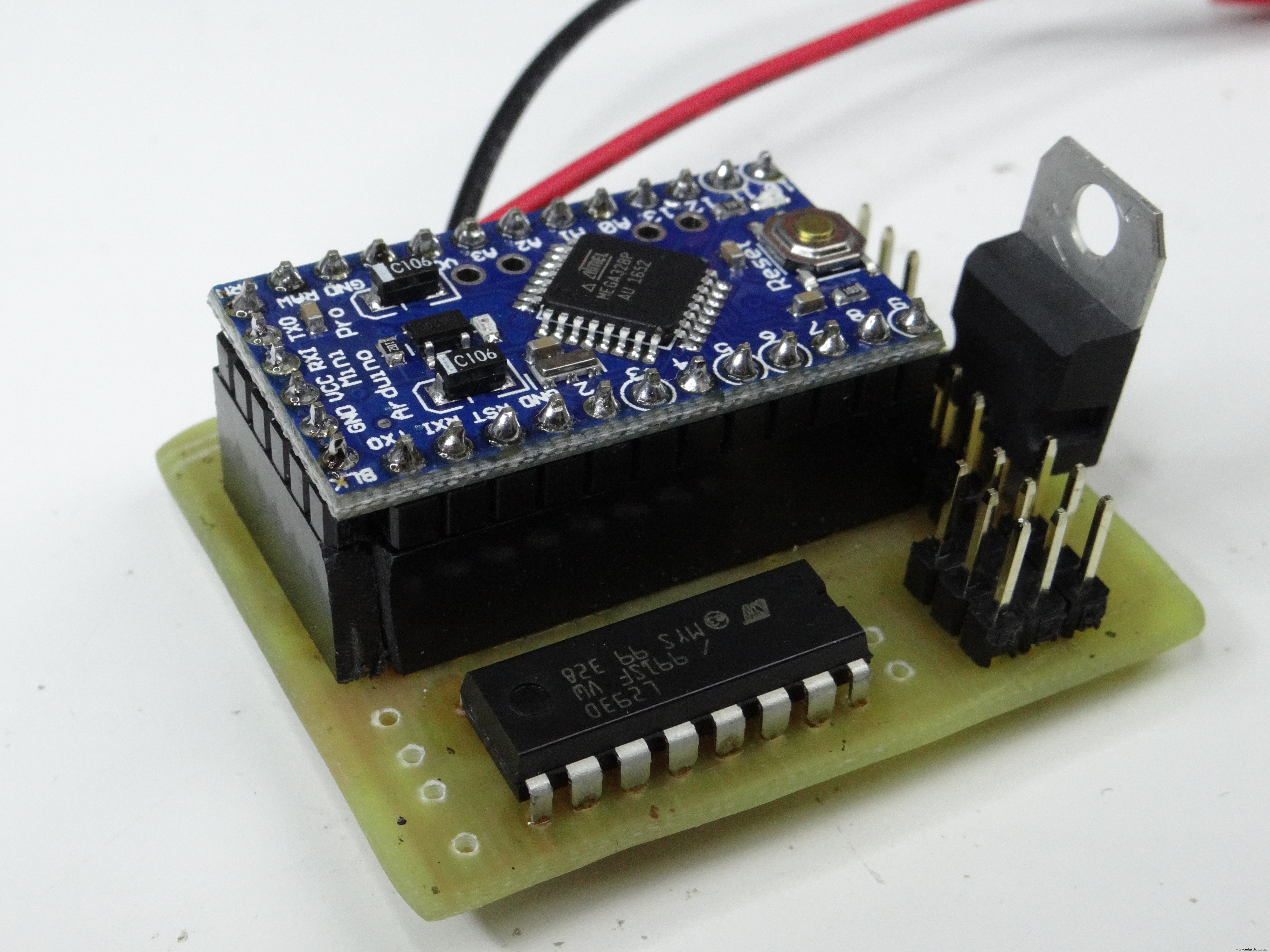
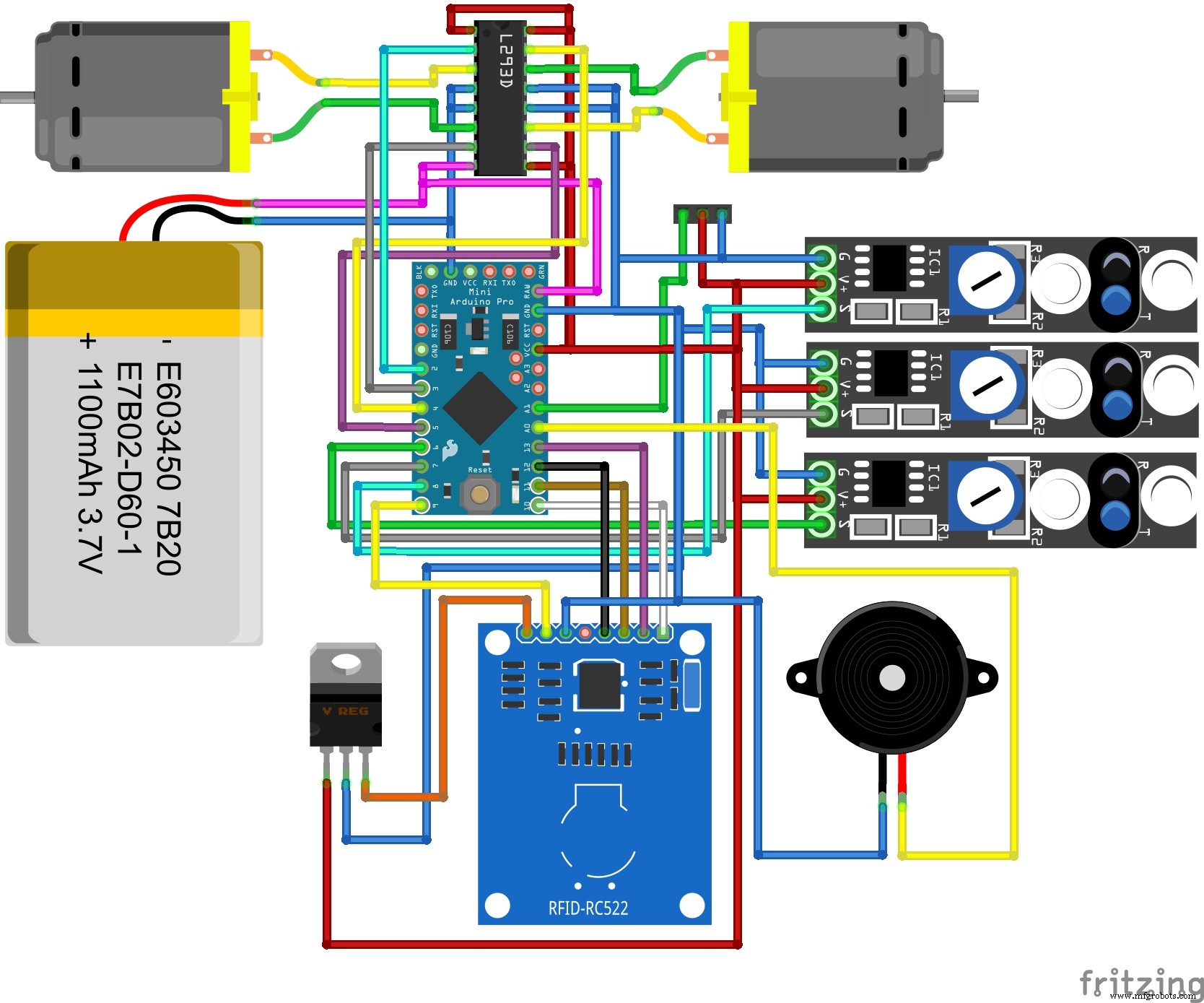
Namun proyek ini tentu saja bukan hanya soal desain. Semuanya dikendalikan oleh Arduino pro mini yang terhubung ke PCB kustom yang saya rancang di Fritzing (file layout dan desain PCB dapat ditemukan di lampiran). Untuk membuatnya bekerja sendiri tanpa input manusia ada juga sensor garis dan modul RFID untuk mendeteksi tag yang ditempatkan di sebelah garis. H bridge yang mengontrol gear motor murah dan populer adalah L293D, kecil dan mudah digunakan. Saya juga memutuskan untuk menambahkan buzzer ke sirkuit sehingga robot dapat berbunyi ketika tag RFID tertentu terdeteksi. Semuanya ditenagai oleh baterai LiPo 2 sel (tegangan nominal 7, 4V). Karena modul RFID harus dialiri daya 3, 3V, saya harus menambahkan pengatur tegangan pada PCB agar dapat mensuplai tegangan yang sesuai ke modul. Ada juga sensor ultrasonik untuk mendeteksi rintangan, seperti yang mereka katakan, keselamatan dulu! Ada satu masalah, membaca jarak dengan HC-SR04 membutuhkan waktu yang cukup lama dalam hal mikrokontroler jadi saya merancang proyek lain (info lebih lanjut di sini) yang memudahkan dan cepat mendeteksi hambatan dengan sensor ini. Itu tidak perlu tapi pasti membuat segalanya lebih mudah.
Untuk membuat PCB diperlukan beberapa alat dan komponen (Arduino, L293D, beberapa breakaway header, konektor baterai, buzzer, 3, regulator tegangan 3V). Anda dapat membaca lebih lanjut tentang cara membuat PCB di rumah dan alat apa yang Anda butuhkan di sini
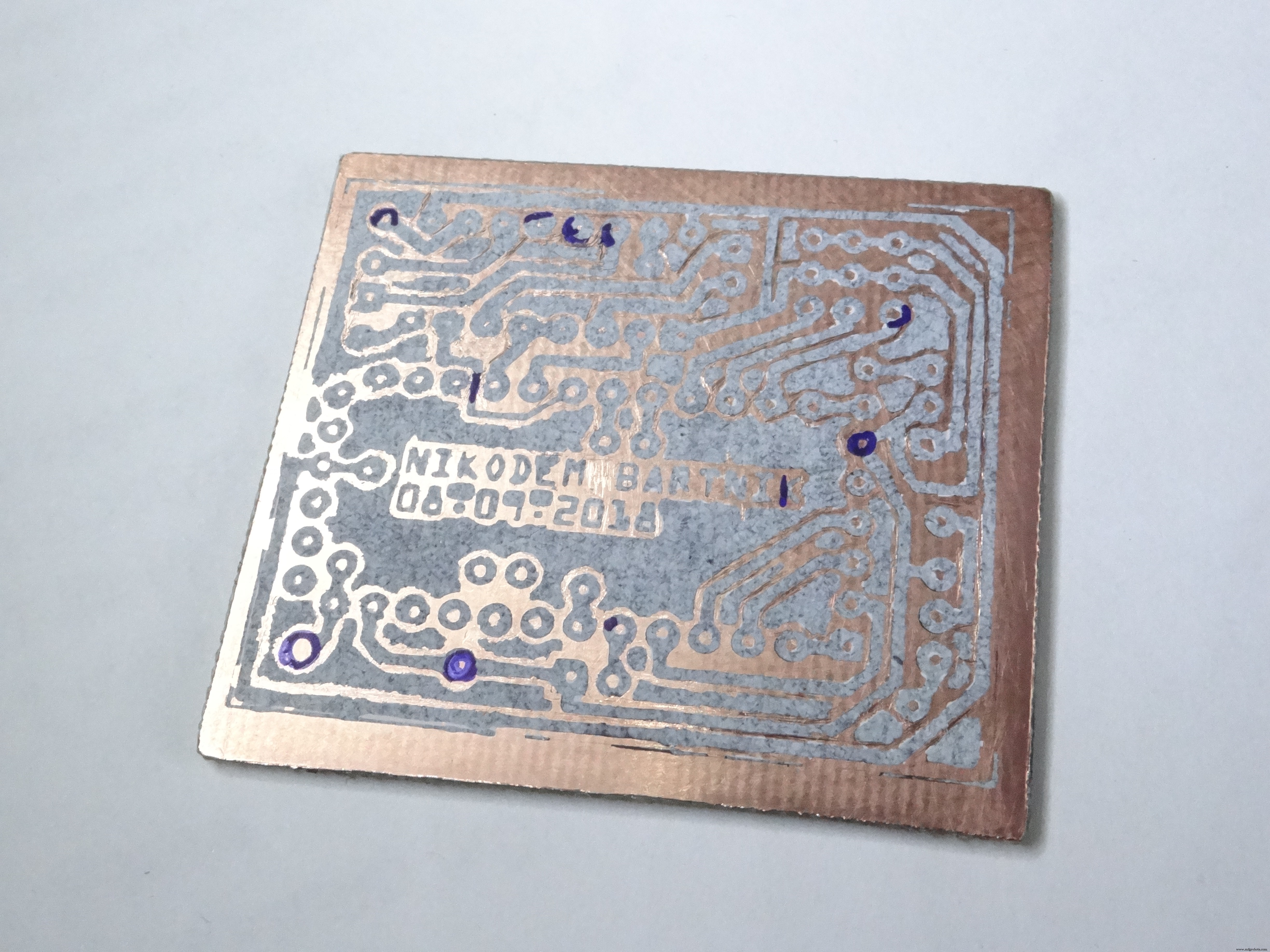
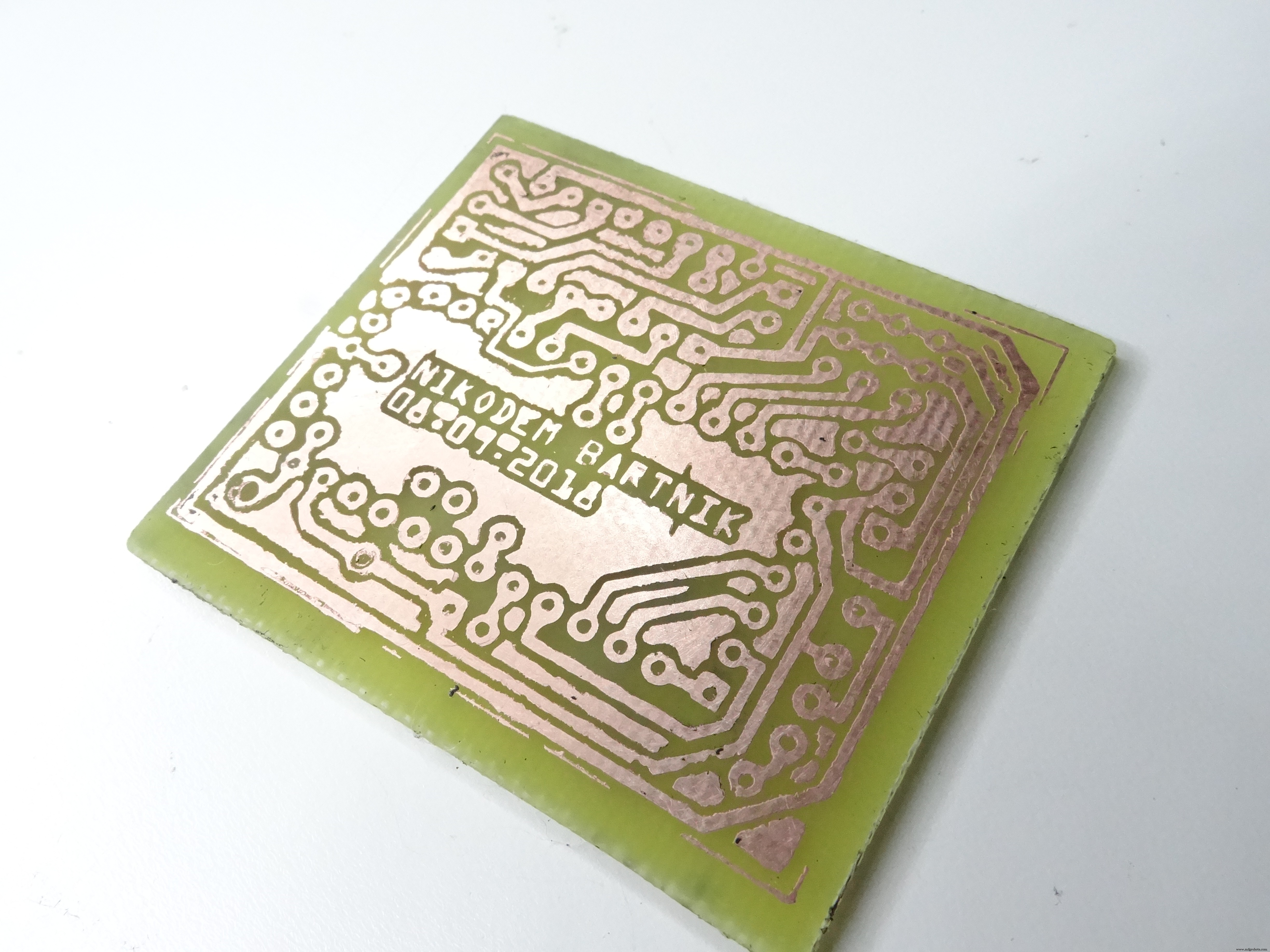
Pada awalnya, saya ingin menggiling PCB saya pada mesin penggilingan CNC, tetapi saya memutuskan untuk menggunakan metode yang saya kenal disebut transfer toner. Di atas Anda dapat melihat toner ditransfer ke papan tembaga. Kemudian saya menggores PCB saya dan membersihkan toner. Anda juga harus mengebor lubang di dalamnya untuk memasukkan THC (Through Hole Components) ke dalamnya.
Menyolder sangat mudah seperti untuk PCB DIY, biasanya jauh lebih sulit untuk menyolder karena tidak ada masker solder* di atasnya.
Ada 5 kabel jumper di bagian bawah PCB (dalam tampilan PCB Fritzing yang diberi label sebagai kabel biru), saya sangat tidak suka menggunakan jumper tetapi dengan sirkuit yang lebih kompleks dan PCB lapisan tunggal, tidak ada cara untuk menghindarinya .
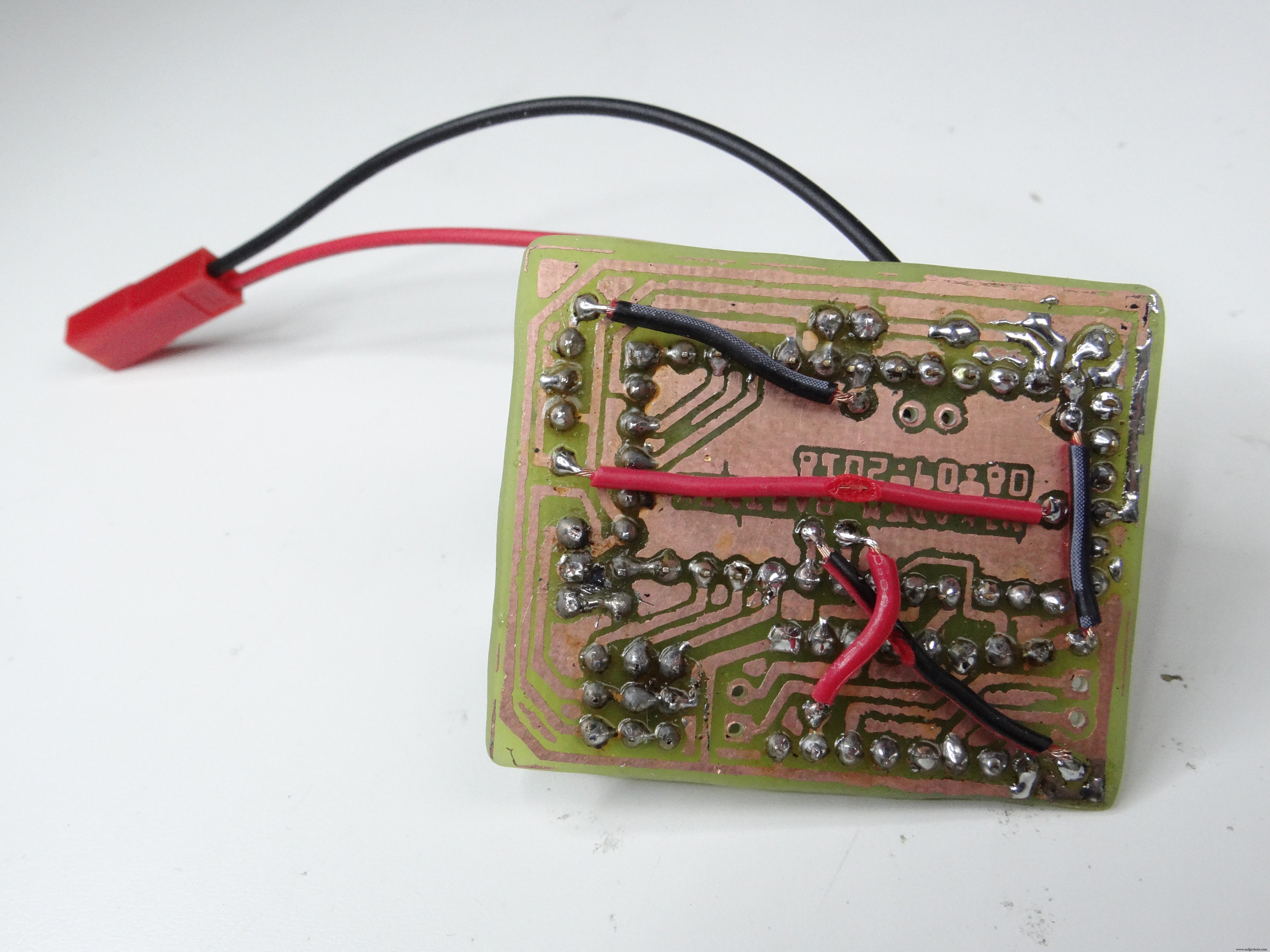
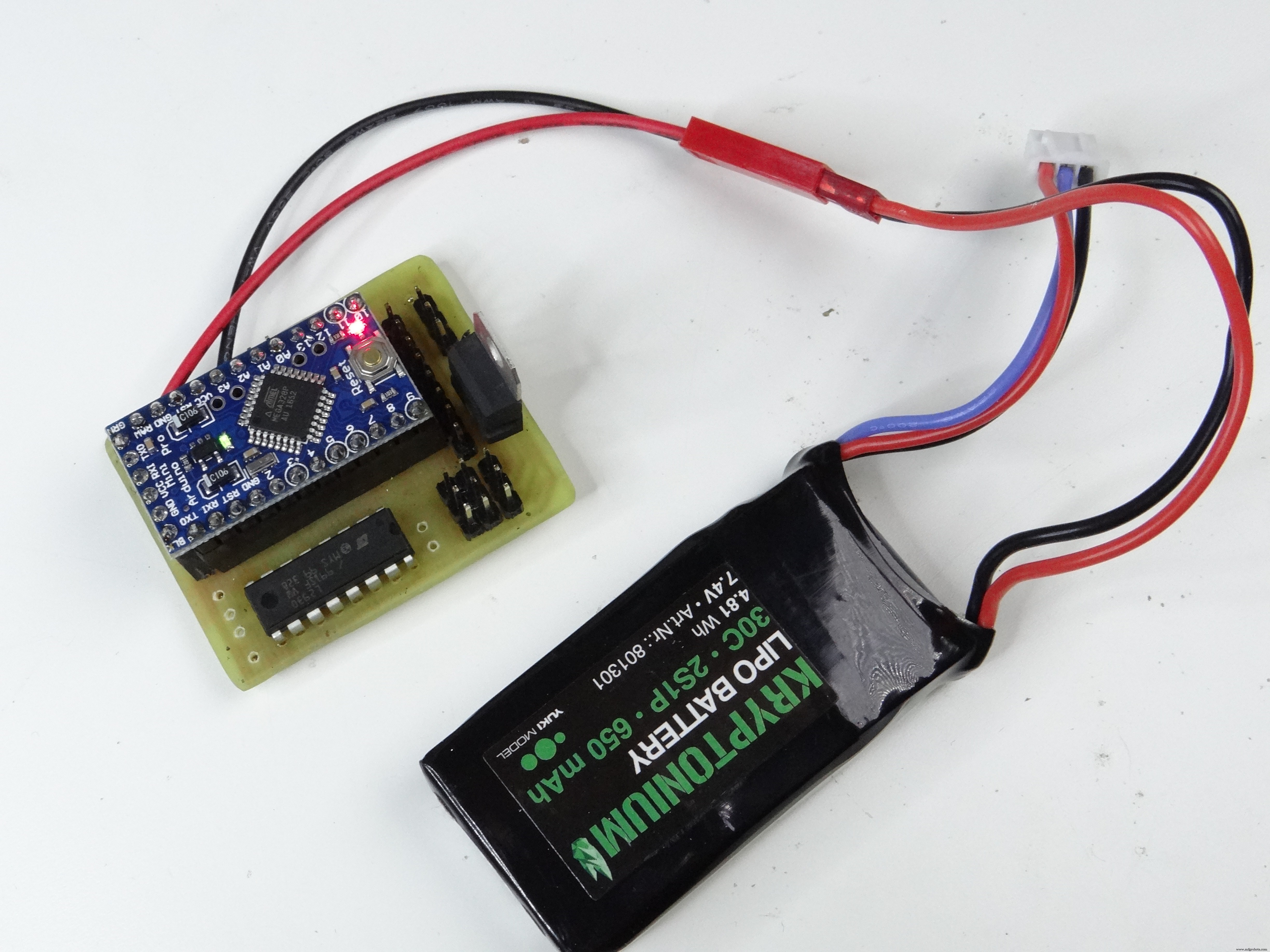
Seperti yang saya katakan untuk menyalakan robot ini saya akan menggunakan baterai LiPo 2 sel, Anda dapat menggunakan baterai lain dengan tegangan yang sama, Anda tidak harus menggunakan kapasitas baterai tertentu (semakin besar kapasitasnya semakin lama robot Anda akan bekerja pada muatan tunggal). Saya juga menyolder soket ke PCB sehingga saya dapat dengan mudah menghubungkan baterai ke sana.

Ketika semuanya disolder saatnya untuk menguji apakah berfungsi dengan menghubungkan baterai ke sana. LED Arduino harus menyala dan tidak boleh ada asap :)
Jika semuanya berfungsi dengan baik, kita dapat melakukan pekerjaan penyolderan terakhir dengan PCB kita, kita perlu menyolder kabel yang nantinya akan kita solder ke motor. Lebih baik membuatnya sedikit lebih panjang dari yang Anda butuhkan dan memotongnya nanti, Anda tidak ingin mereka terlalu pendek.
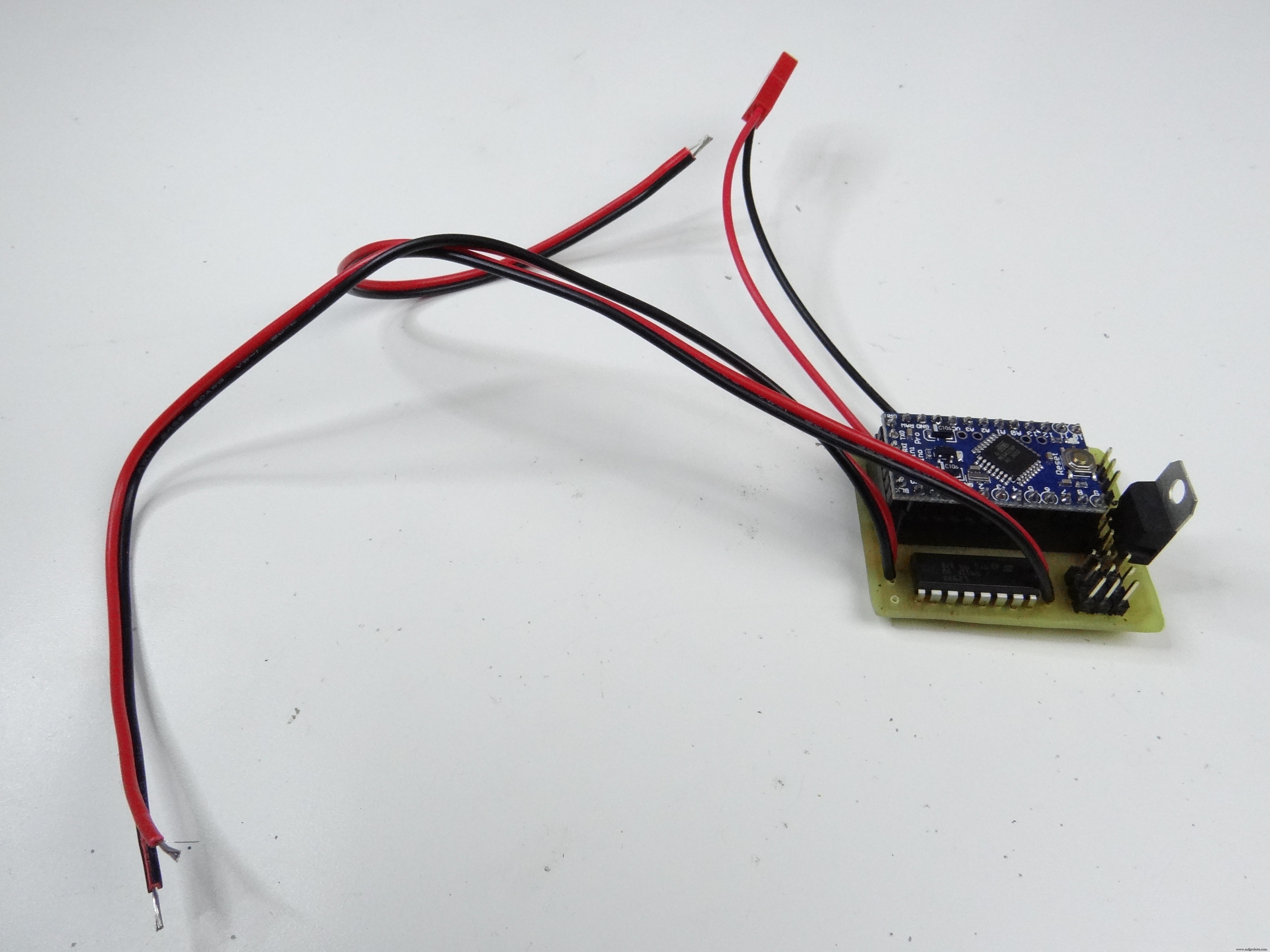
PCB sudah siap! Jika Anda tidak memiliki pengalaman membuat PCB, cobalah membuatnya, tidak terlalu sulit. Jika Anda lebih suka menghubungkannya dengan kabel atau protoboard, jangan ragu untuk melakukannya, tetapi mungkin sulit untuk memasukkannya ke bagian depan robot. Dengan PCB Anda dapat melakukannya dengan mudah! Kami masih perlu menghubungkan semua sensor ke PCB, tetapi pertama-tama kami akan merakit sasis dan memasang semua sensor ke sana.
Merakit 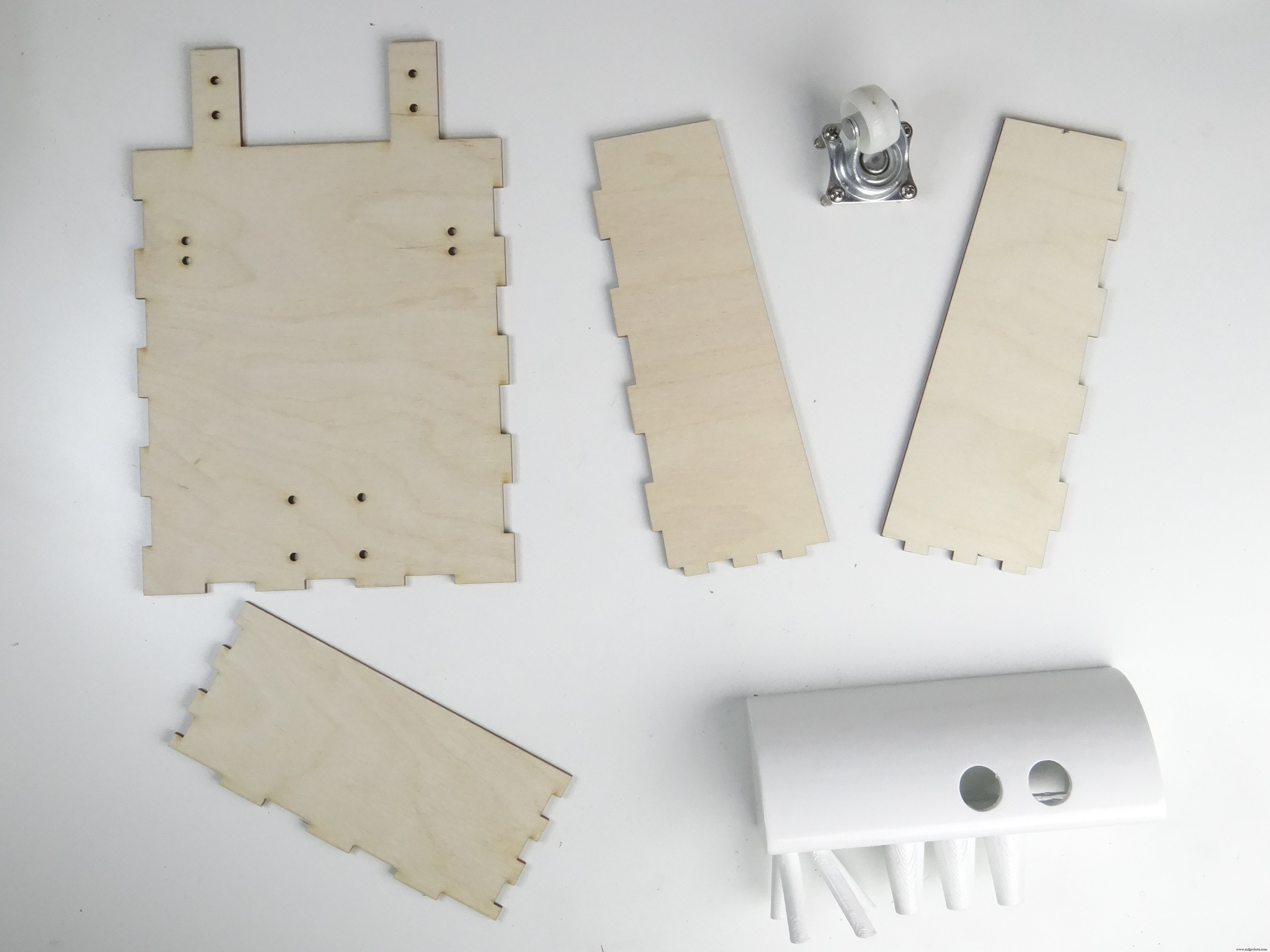
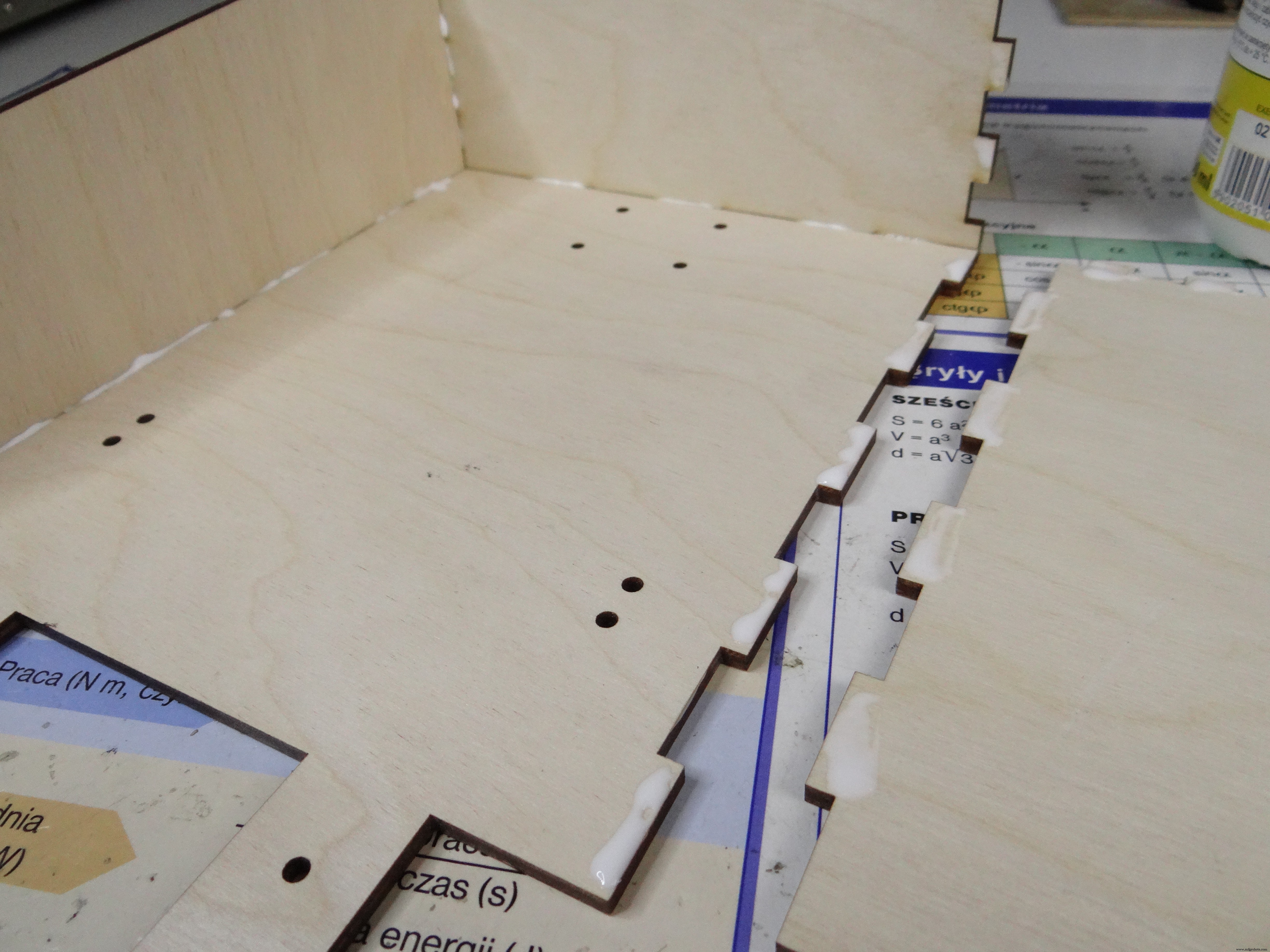
Sambungan jari dari bagian potongan laser sangat cocok satu sama lain tetapi untuk membuatnya benar-benar kaku dan tahan lama kita harus menggunakan lem. Itu kayu lapis sehingga lem kayu apa pun bisa digunakan. Pastikan untuk tidak menggunakan terlalu banyak lem dan bersihkan jika ada kebocoran. Itu harus mengering selama beberapa jam sehingga kita bisa istirahat. Pastikan semua bagian ditempatkan dengan benar, tidak akan ada cara untuk mengubahnya setelah lem mengering.

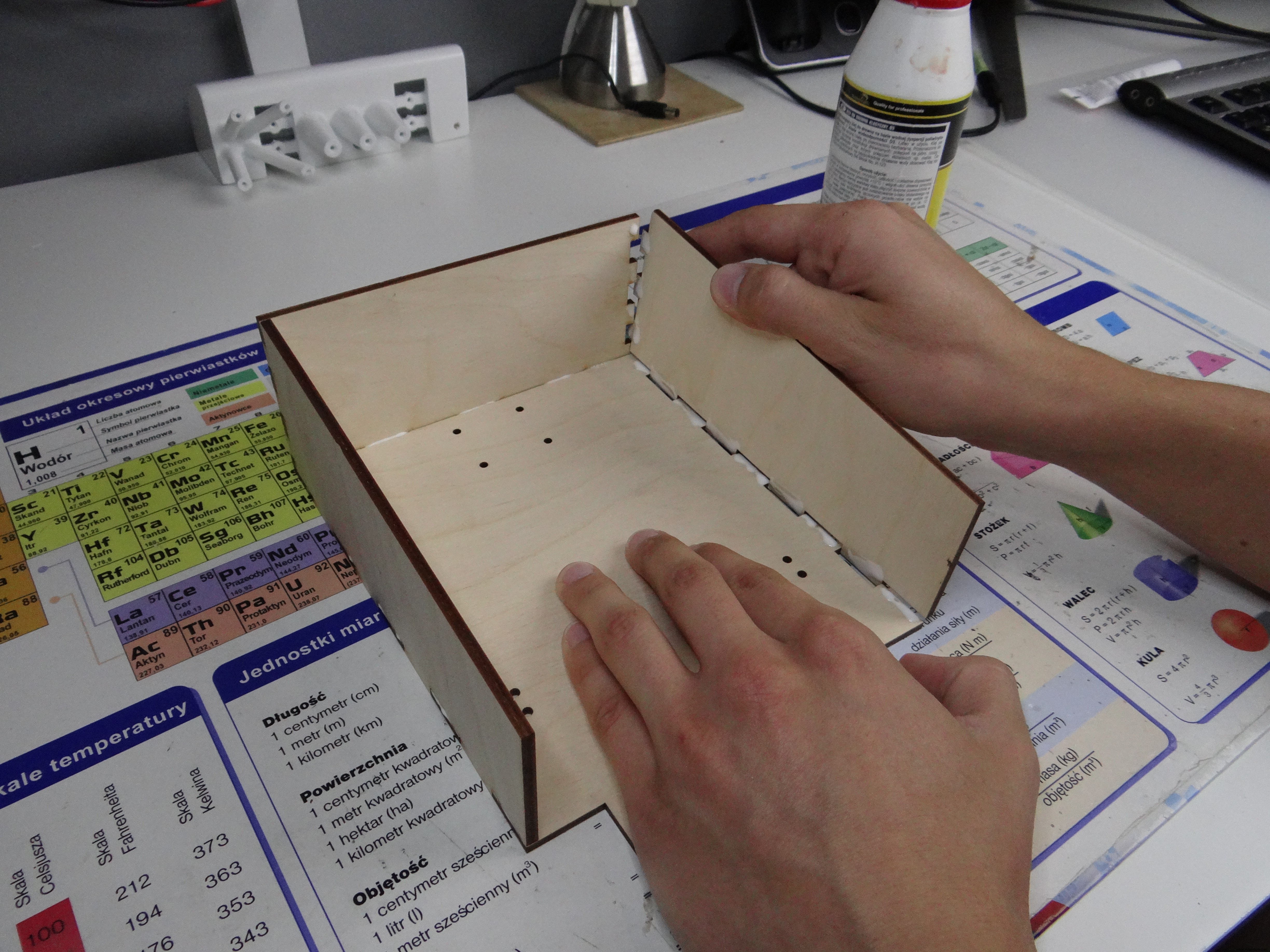
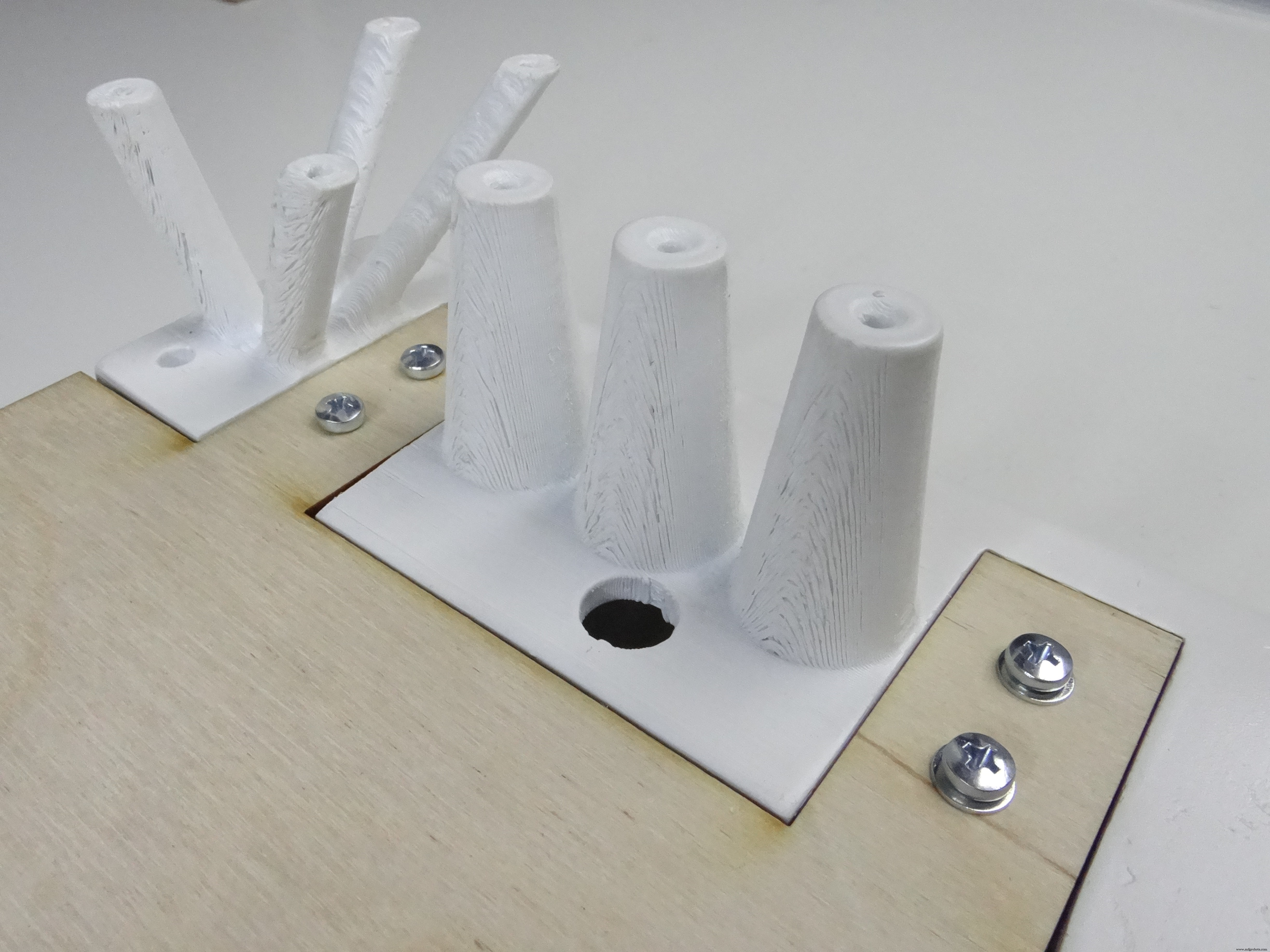
Setelah beberapa jam, kami dapat melanjutkan merakit robot kami. Saatnya menempelkan bagian depan yang dicetak 3D ke kayu lapis. Kami tidak akan menggunakan lem untuk itu, karena mereka mengajari saya selama magang CIT saya:menggunakan lem tidak profesional, lupakan saja (tapi saya harap itu baik-baik saja dengan kayu). Kami akan menggunakan sekrup, ditempatkan dari bagian bawah robot, pastikan sekrupnya pendek (katakanlah panjangnya 6mm) sehingga tidak akan membuat arus pendek pada sirkuit di dalam bagian cetakan 3D. Hal yang baik tentang cara menempelkan bagian depan ke kayu lapis ini adalah Anda tidak dapat melihatnya dari atas, Anda harus melihat ke bawah robot, itu membuatnya jauh lebih baik :) Saya sarankan Anda menggunakan mesin cuci untuk melindungi kayu lapis dari deformasi.

Begitulah seharusnya terlihat sejauh ini, begitu bersih dan sempurna!

Sekarang kita akan memasang motor dan roda belakang ke sasis. Anda akan memerlukan beberapa sekrup M3 untuk itu. Saya juga menggunakan beberapa mesin cuci di sini untuk melindungi kayu lapis.

Saatnya kembali ke sensor, balikkan robot Anda, ambil beberapa sekrup M3 dan obeng.
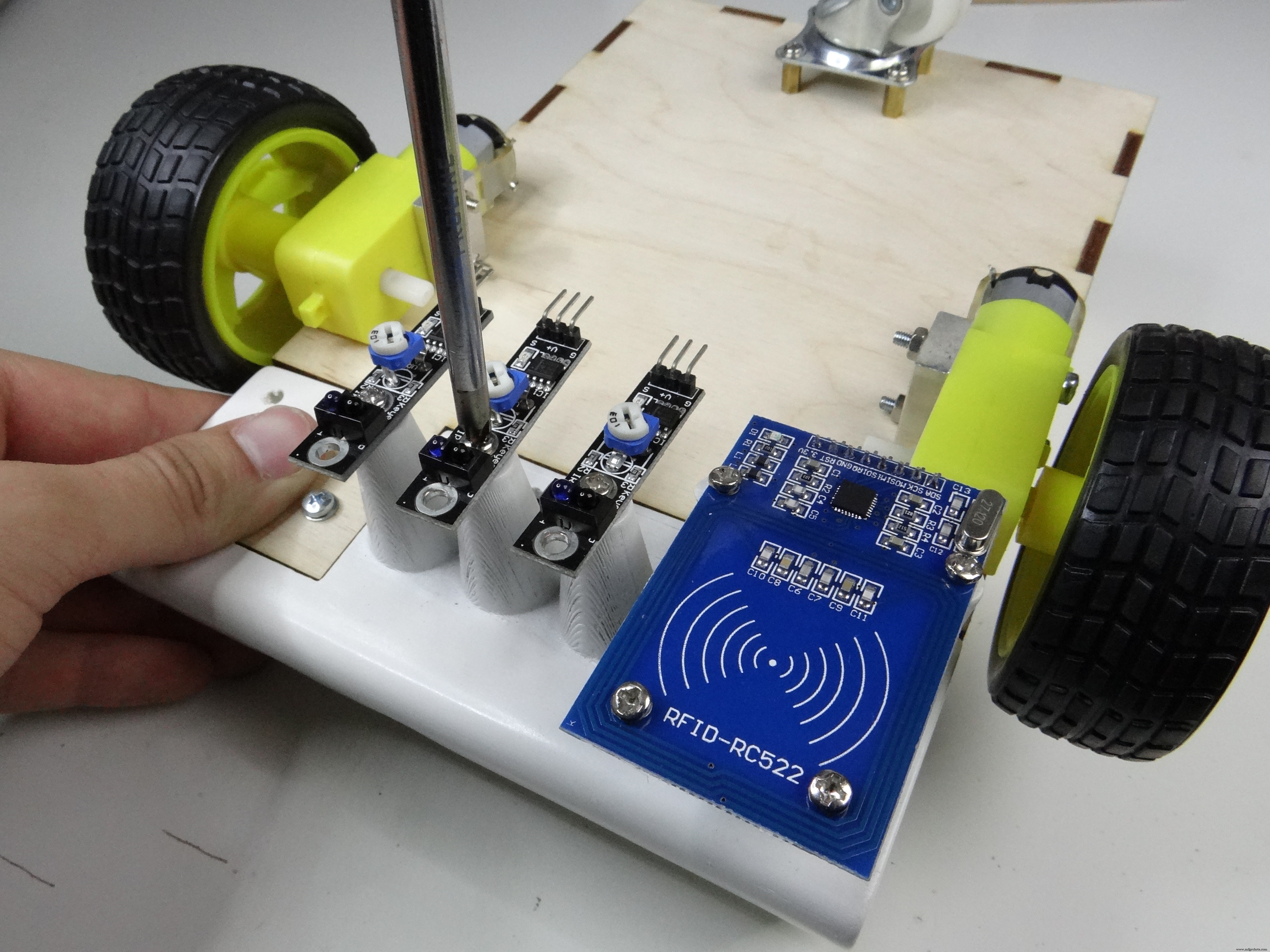
Perakitan selesai! Tidak sulit sama sekali, kesenangan murni. Kita bisa melihat bentuk robot sekarang dengan semua sensor dan motor di tempatnya. Kami hampir menyelesaikannya, tetapi sebelum tes akhir, kami harus menghubungkan semua sensor ke PCB.
Koneksi
Langkah ini dapat memakan waktu, tidak sulit tetapi sangat sulit untuk menempatkan semua kabel melalui ruang kecil bagian depan yang dicetak 3D. Saya menemukan bahwa cara terbaik adalah menghubungkan kabel ke semua sensor dan modul, memasukkannya melalui lubang di bagian depan dan kemudian menghubungkan ke PCB.
Saya ingin meletakkan semua elektronik untuk proyek ini di sisi kiri bagian cetak 3D, sayangnya, baterai ternyata sedikit lebih besar dari yang diiklankan dan saya harus meletakkan baterai di sisi kiri dan elektronik menyala sisi kanan. Tapi itu bukan masalah besar, semuanya cocok dengan sempurna.
Ingatlah juga untuk memasang sensor ultrasonik.
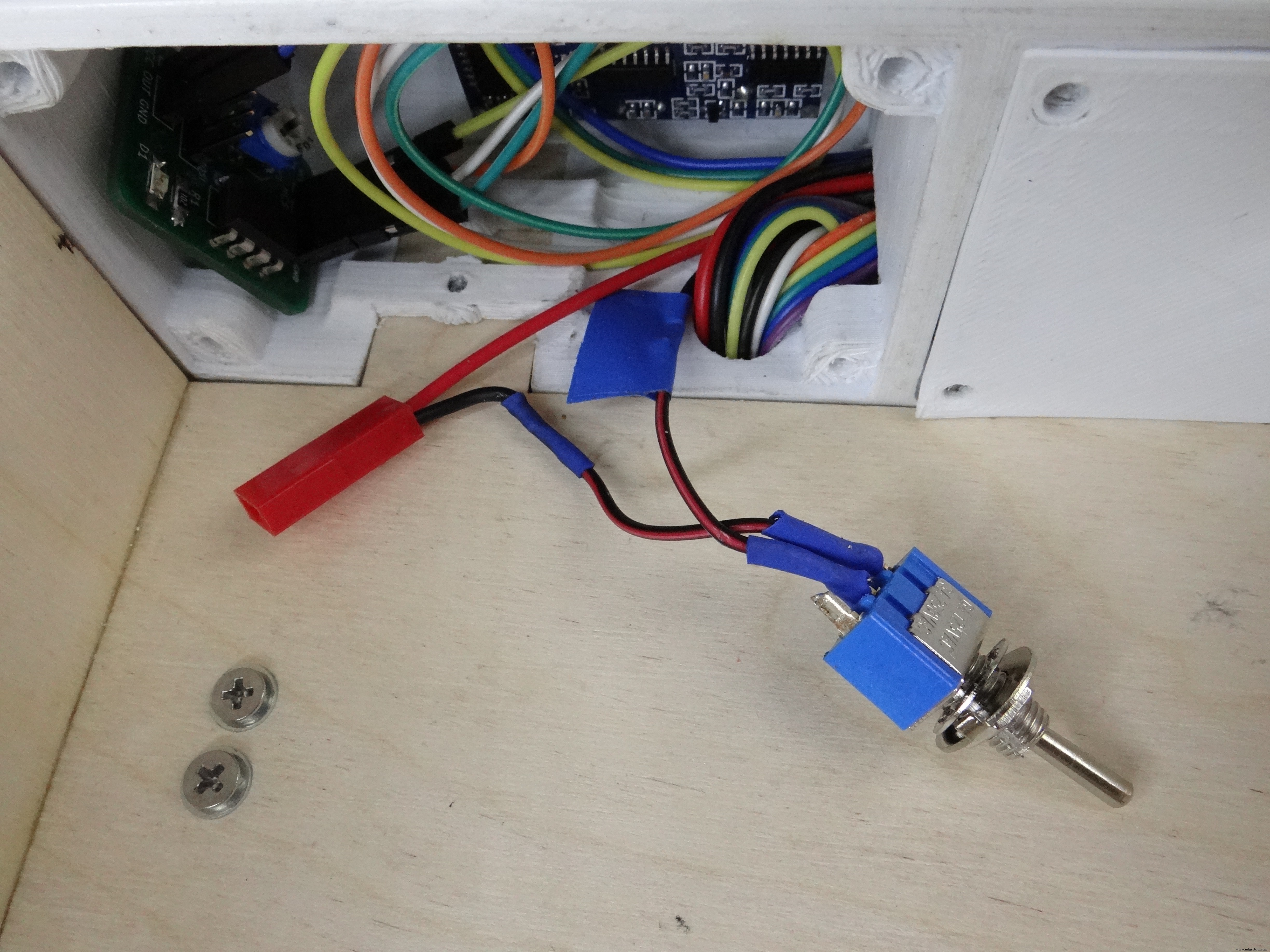
Untuk menghidupkan dan mematikan robot dengan mudah, saya menambahkan sakelar pada konektor baterai seperti itu. Ada juga lubang di panel belakang untuk meletakkan sakelar di dalamnya.
Kode
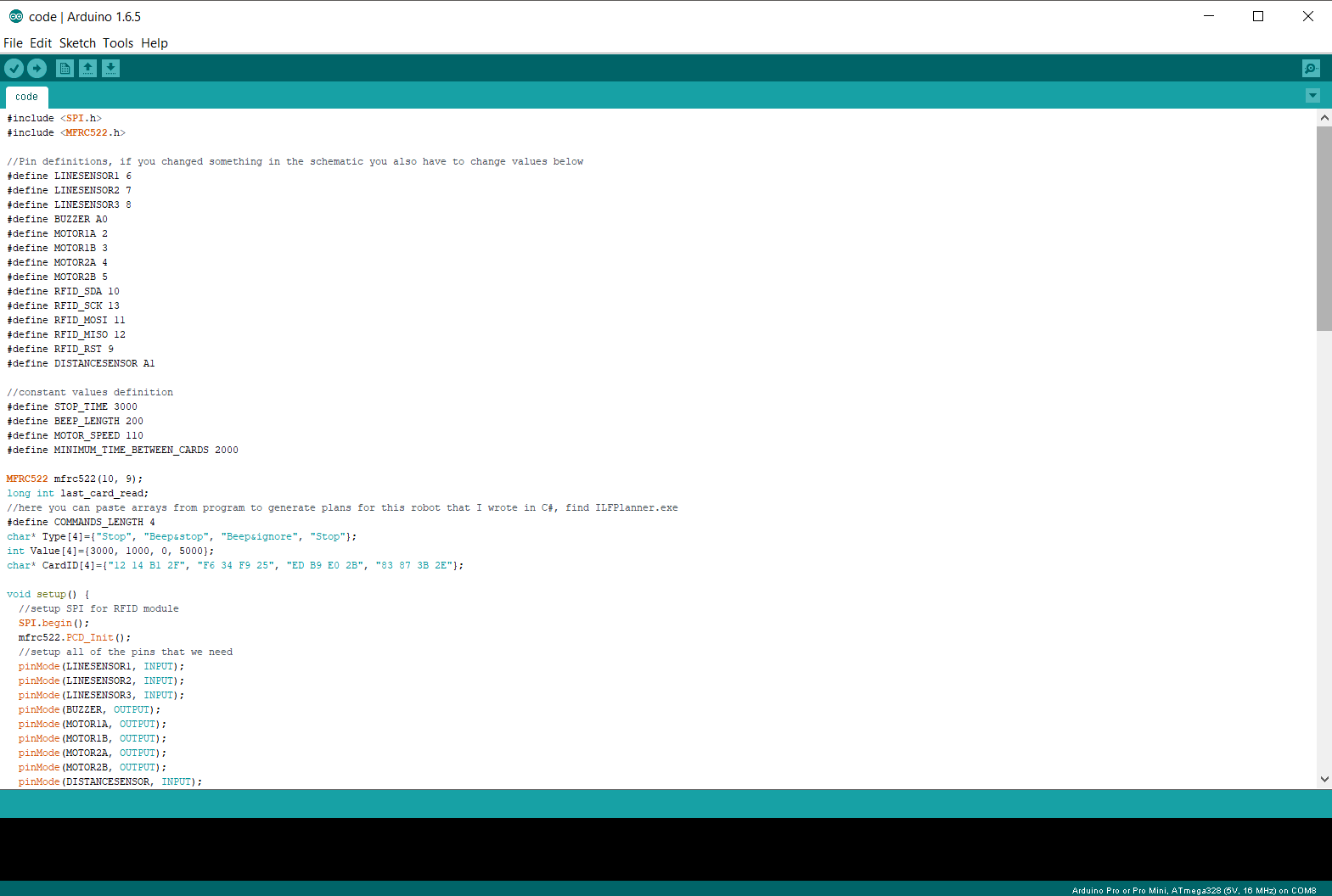
Sebelum kita menutup kembali bagian depan kita harus mengupload kode ke Arduino pro mini. Kita perlu mengeluarkan Arduino dari PCB dan menghubungkannya ke komputer dengan konverter USB-UART. Kode untuk Arduino dapat ditemukan di bawah. Segala sesuatu tentang kode dijelaskan di komentar dan di video. Kode juga dapat ditemukan di editor web
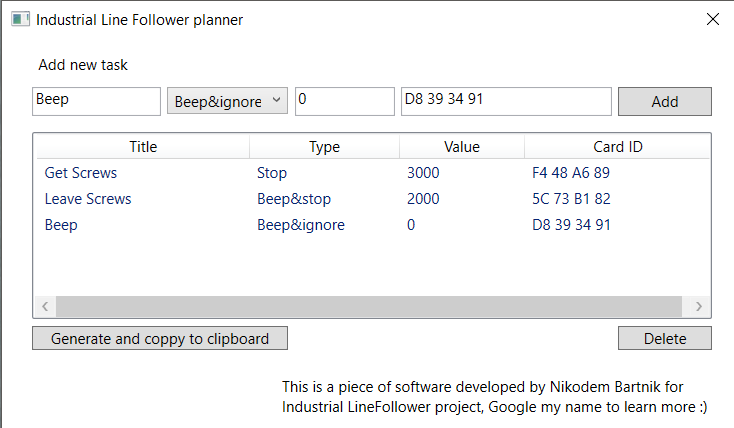
Ada juga program khusus yang saya tulis di C# untuk menghasilkan tugas untuk robot ini, yang disebut perencana tugas (Anda dapat menemukan file .exe di bawah). Ini memungkinkan Anda dengan mudah menghasilkan tugas untuk robot, menyalinnya dan menempelkannya ke Arduino IDE sebelum mengunggahnya ke Arduino. Untuk menghasilkan tugas untuk robot Anda perlu mengetahui id kartu RFID, untuk mendapatkannya Anda dapat membangun rangkaian sederhana info lebih lanjut di sini.
Hampir Selesai... 
Sekarang kita dapat menutup bagian belakang bagian depan dengan dua penutup dan mengencangkannya. Mungkin sulit untuk memasukkan semua komponen di dalamnya, coba atur ulang dan letakkan di posisi berbeda untuk menutup flap.


Untuk mengencangkannya, Anda dapat menggunakan beberapa sekrup M3 pendek dan Anda tidak memerlukan mesin cuci di sana. Itu hal terakhir yang harus kami lakukan. Robot kami akhirnya siap untuk ujian akhir! Saya menghabiskan begitu banyak waktu untuk membangunnya, saya sangat senang bahwa sekarang saya dapat melihat apakah itu akan berfungsi seperti yang saya inginkan :)

Begini penampakannya dengan semua komponen di tempatnya, elektronik tersembunyi di bagian depan dan sensor yang dipasang di robot. Satu-satunya kelemahan adalah pengisian baterai mungkin sulit karena Anda harus membuka penutup belakang untuk mengeluarkannya. Solusi sederhana untuk itu adalah membuat lubang di bagian 3D dan menjulurkan kabel penyeimbang baterai melalui lubang ini.

Ujian akhir!
Saya tidak yakin bagaimana menunjukkan cara kerja robot ini atau saya harus mengatakan bagaimana melakukannya dengan benar. Tujuan utama dari proyek ini adalah untuk membangun sebuah robot open-source murah yang dapat dengan cerdas mengangkut barang-barang di sekitar jalur perakitan dan pabrik, jadi saya membuat jalur perakitan sederhana dan meminta bantuan ayah dan putra saudara laki-laki saya. Tujuan kami adalah untuk menempatkan item di robot, ambil dari robot di stasiun yang berbeda dan letakkan yang sudah memiliki stiker di atasnya dan di stasiun terakhir pindahkan satu dengan stiker ke gudang. Tugas sederhana yang meniru jalur perakitan dan memungkinkan Anda menguji cara kerjanya dengan mudah.
Saya ingin meletakkan selotip hitam di lantai, tetapi itu tidak cukup reflektif untuk sensor saya, jadi saya menggunakan beberapa karton. Dan kami mulai menguji, Anda dapat melihatnya di video (Anda dapat menemukannya di awal proyek ini).

Ada banyak hal yang bisa salah dalam proyek ini, tetapi semuanya berjalan dengan sempurna. Ini berfungsi seperti yang saya inginkan, setiap langkah, ide awal melalui desain dan perakitan berjalan lancar dan sangat bagus. Ketika saya mengatakan bahwa ada banyak hal yang bisa salah, saya benar-benar bersungguh-sungguh. Saya memiliki banyak pengalaman dengan pencetakan 3D, pemrograman, dan Arduino, tetapi itu adalah pertama kalinya saya menggambar proyek saya di atas kertas yang merupakan ide bagus dan saya pasti akan melakukannya lebih sering, saya belum pernah mendesain apa pun untuk pemotongan laser sebelumnya, meskipun saya memiliki sertifikat programmer C#, saya bukan ahlinya. Dan saya berhasil menghubungkan semua itu bersama-sama untuk membuat robot yang keren :) Saya harap Anda menyukai proyek saya, jika demikian jangan lupa untuk mengatakan beberapa kata tentangnya di komentar, saya sangat ingin tahu apa pendapat Anda tentangnya. Jika Anda memiliki pertanyaan, jangan ragu untuk bertanya! Terima kasih telah membaca.
Selamat membuat!
Kode
- Kode Arduino Pengikut Jalur Industri
- Perencana Tugas
- Perencana tugas.exe
Kode Arduino Pengikut Jalur IndustriArduino
Ini adalah sketsa Arduino untuk proyek Industrial Line Follower/*** C oleh Nikodem Bartnik* http://NikodemBartnik.pl* https://www.youtube.com/user/nikodembartnik**/#include #sertakan //Definisi pin, jika Anda mengubah sesuatu dalam skema, Anda juga harus mengubah nilai di bawah ini#define LINESENSOR1 6#define LINESENSOR2 7#define LINESENSOR3 8#define BUZZER A0#define MOTOR1A 2# tentukan MOTOR1B 3#menentukan MOTOR2A 4#menentukan MOTOR2B 5#menentukan RFID_SDA 10#menentukan RFID_SCK 13#menentukan RFID_MOSI 11#menentukan RFID_MISO 12#menentukan RFID_RST 9#menentukan DISTANCESENSOR A1//definisi nilai konstan#menentukan STOP_TIME_#LENGTH MOTOR_SPEED 110#define MINIMUM_TIME_BETWEEN_CARDS 2000MFRC522 mfrc522(10, 9);long int last_card_read;//di sini Anda dapat menempelkan array dari program untuk menghasilkan rencana untuk robot ini yang saya tulis di C#, temukan ILFPlanner.exe#define COMMANDS_LENGTH 4char* ]={"Stop", "Bip&stop", "Bip&ignore", "Stop"};int Nilai[4]={3000, 1000, 0, 5000};char* CardID[4]={" 12 14 B1 2F", "F6 34 F9 25", "ED B9 E0 2B", "83 87 3B 2E"};void setup() { //setup SPI untuk modul RFID SPI.begin(); mfrc522.PCD_Init(); //setup semua pin yang kita butuhkan pinMode(LINESENSOR1, INPUT); pinMode(LINESENSOR2, INPUT); pinMode(LINESENSOR3, INPUT); pinMode(BUZZER, OUTPUT); pinMode(MOTOR1A, OUTPUT); pinMode(MOTOR1B, OUTPUT); pinMode(MOTOR2A, OUTPUT); pinMode(MOTOR2B, OUTPUT); pinMode(DISTANCESENSOR, INPUT);}void loop() {//bagian program ini merealisasikan fungsi baris berikutif(digitalRead(LINESENSOR1) ==LOW &&digitalRead(LINESENSOR2) ==HIGH &&digitalRead(LINESENSOR3) ==LOW) { Maju();}else if(digitalRead(LINESENSOR1) ==TINGGI &&digitalRead(LINESENSOR2) ==RENDAH &&digitalRead(LINESENSOR3) ==RENDAH){Left();delay(20);}else if(digitalRead(LINESENSOR1 ) ==LOW &&digitalRead(LINESENSOR2) ==LOW &&digitalRead(LINESENSOR3) ==HIGH){Right();delay(20);}//jika kartu terakhir terdeteksi lebih dari MINIMUM_TIME_BETWEEN_CARDS kita dapat memeriksa apakah ada yang lainjika (millis() - last_card_read>=MINIMUM_TIME_BETWEEN_CARDS){//disini kita harus menunggu kartu, ketika sudah dekat dengan sensor if ( ! mfrc522.PICC_IsNewCardPresent()){ return; }//kita dapat membaca nilainya jika ( ! mfrc522.PICC_ReadCardSerial()) { return; }//memproses nilai kartu agar dapat di-redable String content=""; for (byte i =0; i Perencana TugasC#
ZIP dengan program C# saya untuk menghasilkan tugas bagi robot, Anda juga dapat menemukan .exe di bawah ini.Tidak ada pratinjau (hanya unduh).
Perencana tugas.exeC#
Anda cukup menjalankannya di mesin windows Anda, tanpa instalasiTanpa pratinjau (hanya unduh).
Suku cadang dan penutup khusus
Bagian depan untuk sasis yang menampung semua sensor dan elektronik. Dicetak dengan PLA putih kemudian diampelas dan dicat beberapa kali agar mengkilat. Memerlukan waktu sekitar 8 jam untuk mencetak, Anda harus menggunakan penyanggaAnda memerlukan ini untuk menutup sisi kiri bagian depanAnda memerlukan ini untuk menutup sisi kiri bagian depan File DXF untuk pemotongan laser dalam bahan 4mm (kayu lapis, plexi) plateback_CLMFY08IX0.dxfDXF file untuk pemotongan laser pada material 4mm (kayu lapis, plexi) platebottom_YXrDbx6Zxr.dxfDXF file untuk pemotongan laser pada material 4mm (kayu lapis, plexi) plateleft_SWSXq4pbU1.dxfDXF file untuk pemotongan laser pada material 4mm (kayu lapis, plexi) plateright_mRA9hd7Kp8.dxfFusion360 jika Anda ingin mengedit sesuatu industrial_line_follower_design_vX9sr32Rar.f3d Skema
Fritzing file jika Anda ingin mengedit sesuatu schematic_QjiJP4TLOo.fzzSkematis dengan semua koneksi untuk proyek ini 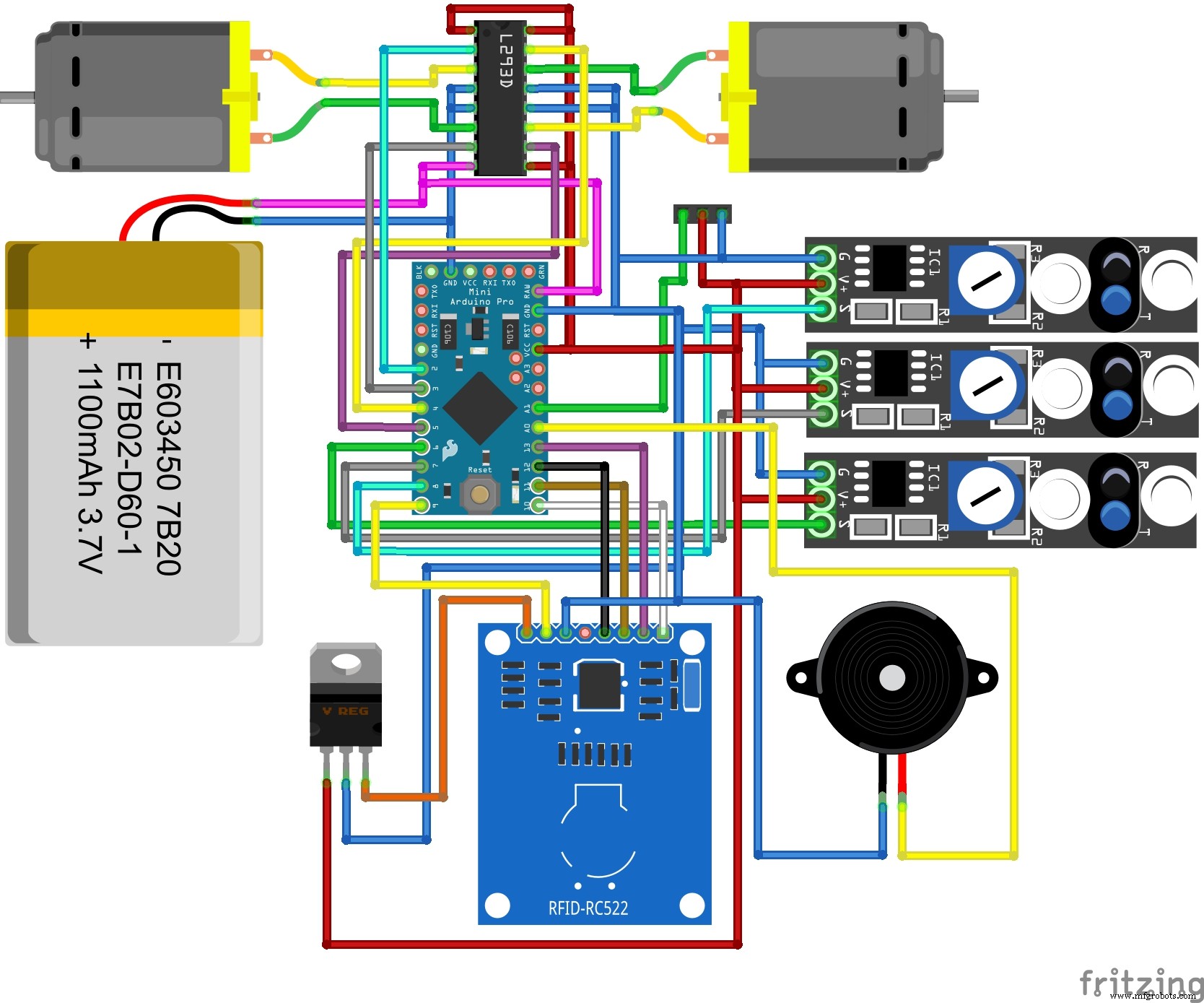 Ini adalah file PDF yang Anda perlukan untuk membuat PCB untuk proyek ini, ini adalah satu sisi jadi ada bukan lapisan atas
Ini adalah file PDF yang Anda perlukan untuk membuat PCB untuk proyek ini, ini adalah satu sisi jadi ada bukan lapisan atas