Akurasi VS Pengulangan VS Resolusi:Apa Perbedaannya dalam Robotika Industri?

Sumber:metrologi. berita
Robotika industri dengan cepat mendapatkan momentum dan diadopsi oleh berbagai produsen di berbagai industri. Hal ini terutama karena lebih efisien dan mempermudah pekerjaan dibandingkan dengan mengandalkan tenaga manusia. Robot industri ini digunakan untuk memastikan bahwa tugas-tugas seperti mengemas, menyortir, memilih, dan menempatkan antara lain dilakukan dengan benar.
Sebagai produsen, robot industri adalah cara yang bagus untuk meningkatkan produksi dan memastikan bahwa semua produk Anda memenuhi standar. Namun, ketika berbicara tentang robotika industri, ada beberapa aspek yang perlu Anda ingat. Beberapa di antaranya termasuk akurasi, pengulangan, dan resolusi. Aspek-aspek ini membantu menjalankan robot industri Anda lebih mudah dan lebih cepat. Mempelajari lebih lanjut tentang mereka adalah langkah hebat berikutnya untuk memastikan bahwa sebagai produsen Anda dapat membuatnya bekerja untuk Anda.
Apa yang dimaksud dengan Akurasi dalam Robotika?
Sumber:www. machinedesign.com
Akurasi mengacu pada kapasitas robot untuk menempatkan ujung pergelangan tangannya dalam volume kerja pada titik target yang diinginkan. Ia bekerja dalam hubungannya dengan resolusi spasial. Akurasi bergantung pada teknologi robot dan seberapa dekat peningkatan kontrol dapat ditentukan. Ini berlaku untuk setiap gerakan sendi. Namun, ketidakakuratan mekanis yang melibatkan kualitas output robot untuk saat ini dikecualikan.
Resolusi dan Akurasi

Sumber:metrologi. berita
Akurasi digambarkan sebagai setengah dari resolusi kontrol. Ini mempertimbangkan kasus terburuk di mana titik target berada langsung di antara dua titik kontrol. Ketidakakuratan mekanis dengan distribusi statistik memerlukan pertimbangan yang lebih praktis, dalam hal ini akurasi diklasifikasikan sebagai setengah dari resolusi spasial.
Dalam robotika, presisi sering dikacaukan dengan resolusi dan pengulangan. Keakuratan akhir sistem robot bergantung pada beberapa faktor. Ini termasuk ketidakakuratan teknisnya, algoritme untuk kontrol komputer, dan resolusi sistem.
Apa yang Menyebabkan Ketidakakuratan Mekanik?

Sumber:www. iotworldtoday.com
Ketidakakuratan mekanis sebagian besar disebabkan oleh serangan balik pada sambungan manipulator dan pembengkokan ikatan. Backlash ditemukan dalam mekanisme roda gigi, leadcrews, dan aktuator penggerak hidrolik. Persyaratan desain utama untuk tautan adalah meminimalkan pembengkokan tautan, karena setiap defleksi tautan karena beban di ujung robot menyebabkan kesalahan posisi. Namun, kekakuan hubungan yang lebih besar tidak dapat dicapai dengan peningkatan drastis massa mereka.
Massa yang lebih besar menghasilkan peningkatan respons waktu lengan. Karena kesalahan pembulatan di komputer, algoritme kontrol dapat memicu kesalahan posisi. Ketika pengontrol robot menggunakan representasi bilangan bulat skala Cartesian dan koordinat sudut, kesalahan pembulatan mesin bisa menjadi penting. Jika representasi floating-point digunakan oleh komputer, maka kesalahan pembulatan mungkin dapat diabaikan.
Efek Pengaruh Eksternal pada Akurasi

Sumber:www. forbes.com
Akurasi dipengaruhi oleh variabel eksternal juga. Dengan konfigurasi yang diperluas, itu menjadi lebih bermakna pada titik pergelangan tangan. Ketepatan berkurang dalam volume kerja, dari lokasi terdekat dari lengan pondasinya. Kemudian diarahkan ke lokasi di luar rentang volume kerja.
Jika siklus gerak terbatas pada rentang kerja yang terbatas, akurasi meningkat, sementara itu menurun jika beban yang ditanggung oleh robot menjadi signifikan. Keakuratan lokasi tergantung pada posisi dalam amplop ruang kerja.
Untuk tujuan ini, tanpa menggunakan sensor, pemrograman off-line robot sulit dilakukan. Penyebab kesalahan lokasi yang mempengaruhi presisi dapat dikelompokkan menjadi empat kelompok yang meliputi:kesalahan digitalisasi, kesalahan kinematik stokastik, kesalahan kinematik deterministik, dan kesalahan kalibrasi.
Karena sumbu robot perakitan sebagian besar vertikal, presisi sedikit lebih baik karena pengaruh eksternal dan ketidakakuratan mekanis kurang terpengaruh; tetapi ini tidak cukup untuk menjalankan aplikasi perkawinan bagian tertentu yang bebas masalah seperti peg-in-hole.
Apa itu Resolusi dalam Robotika?
Sumber:ein. org.pl
Resolusi adalah peningkatan terkecil dalam gerakan yang dapat dihasilkan komputer. Karena mesin menggunakan pengontrol digital dan motor umpan balik diskrit, resolusi adalah jumlah di mana semua gerakan dibuat. Jika resolusi kontrol perangkat adalah n, maka semua gerakan adalah kelipatan bilangan bulat dari n.
Ini bukan untuk mengatakan bahwa resolusi adalah bagian terendah dari skema apa pun, melainkan yang terbesar. Jika enkoder umpan balik hanya memiliki resolusi akurat 1 mikrometer, pengontrol komputer yang dapat mengukur gerakan 0,1 mikrometer tidak akan dapat menggeser mesin secara akurat dan menaikkannya sebesar 0,1 mikrometer.
Sistem kontrol tidak akan pernah “melihat” gerakan kecil seperti itu. Oleh karena itu, dalam menafsirkan statistik keluaran mesin, seseorang harus sangat berhati-hati.
Apa itu Pengulangan dalam Robotika?
Sumber:www. linearmotiontips.com
Pengulangan adalah konsep matematika terkait akurasi yang menjelaskan bagaimana suatu titik direplikasi. Jika sambungan robot diprogram untuk bergeser beberapa kali dari titik tertentu, Anda dapat melakukannya pada sudut yang sama. Ini akan dilakukan semua di bawah kondisi lingkungan yang sama yang akan menghasilkan perpindahan yang berbeda.
Sementara sebuah gol sering meleset dengan selisih yang lebar, kami menyimpulkan bahwa pengulangannya tinggi dan akurasinya rendah jika kesalahan yang sama diulangi. Kesalahan mengenai koordinat absolut tidak ditentukan oleh pengulangan. Penyimpangan posisi dari rata-rata perpindahan adalah pengulangan perangkat.
Sebagian besar produsen robot memberikan nilai numerik untuk pengulangan robot mereka daripada akurasinya. Alasannya adalah bahwa presisi tergantung pada beban spesifik yang dibawa oleh gripper. Bobot yang lebih berat menyebabkan defleksi yang lebih besar dari koneksi robot dan beban yang lebih besar pada sambungan, menurunkan presisi, tetapi nilai pengulangan hampir tidak tergantung pada nilai pegangan. Pengulangan robot biasanya akan lebih baik daripada presisi, biasanya dihitung dalam seperseratus inci.
Peran Akurasi, Pengulangan, dan Resolusi dalam Berbagai Aplikasi Robot

Sumber:kontrol. com
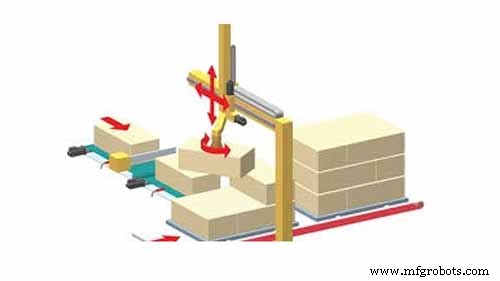
Ketika berbicara tentang robotika dan penerapan aspek-aspek ini, Anda menemukan bahwa mereka selalu lebih baik bersama-sama. Dengan kombinasi akurasi, pengulangan, dan resolusi, robot industri dapat bekerja dengan presisi memastikan bahwa tugas dilakukan dengan baik. Saat bekerja dengan lengan pick and place, aspek-aspek ini akan membantu mempermudah proses. Sebagai produsen, penting untuk memastikan bahwa Anda telah mencentang semua kotak ini untuk pengalaman yang lebih mudah.
Akurasi
Pengulangan
Resolusi
Akurasi akan memastikan bahwa pergelangan tangan robot ditempatkan dengan benar
Pengulangan dimaksudkan untuk memastikan bahwa tugas dilakukan berulang kali dengan mudah
Resolusi akan membantu membuat penyesuaian kecil selama proses ini untuk memastikan akurasi tepat sasaran
Dengan mengingat hal ini, penting untuk memastikan bahwa perangkat robot Anda menampilkan aspek-aspek penting ini. Anda akan berada dalam posisi yang lebih baik untuk memastikan bahwa semua pekerjaan dilakukan dengan benar dan meningkatkan proses produksi Anda.
Kesimpulan
Ketika datang ke robotika industri, mereka memainkan peran besar dalam pengembangan proses manufaktur yang berbeda. Mereka memberikan manfaat luar biasa yang penting dalam memastikan bahwa produksi meningkat. Namun, untuk mendapatkan manfaat terbaik dari ini, penggunaan aspek kunci seperti akurasi, pengulangan, dan resolusi sangat penting.
Seperti yang telah dibahas sebelumnya, aspek-aspek ini harus ditampilkan dalam operasi Anda untuk memastikan bahwa Anda menikmati manfaat penuh dari robot industri. Sebagai produsen, selaras dengan apa yang dibutuhkan dari Anda adalah penting. Luangkan waktu Anda untuk mempelajari aspek-aspek ini dan apa artinya saat bekerja dengan teknologi robot.


