Jenis Sendi Robot:Panduan Lengkap
Sumber:www. idtechex.com
Otomasi dalam industri manufaktur dengan cepat mendapatkan momentum dengan lebih banyak perusahaan yang mengadopsi penggunaan robotika. Ini dikaitkan dengan manfaat otomatisasi dalam bisnis dan penggunaan proses yang lebih cerdas dan lebih cerdas. Anda bisa mendapatkan lebih banyak produksi dan juga mengurangi risiko cedera di pabrik. Sebagian besar bisnis condong ke arah penggunaan lengan robot untuk melayani pengambilan &tempat, pengemasan, pengecatan, dan perakitan di antara tugas-tugas lainnya.
Saat Anda memasukkan lengan robot ke dalam bisnis Anda, pastikan Anda bekerja dengan produsen lengan robot berkualitas yang akan menawarkan yang terbaik untuk Anda. Selain itu, penting juga untuk memiliki pemahaman dasar tentang apa yang mereka butuhkan. Lengan robot memiliki tubuh, pergelangan tangan, dan efektor ujung yang memiliki fungsi tertentu. Agar bagian-bagian yang berbeda ini bekerja secara akurat, perlu adanya sambungan robot. Dalam artikel ini, kami akan mempelajari berbagai sendi robot untuk memberi Anda pemahaman yang lebih baik.
Apa itu Sendi Robot?
Sumber:www. researchgate.net
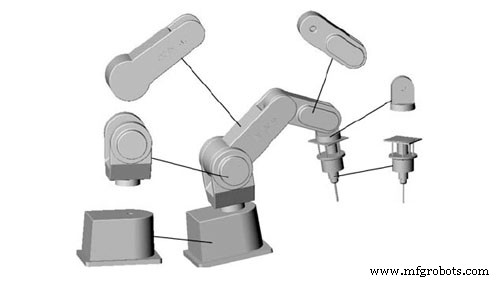
Sambungan robot mengacu pada komponen robot yang dapat bergerak yang menghasilkan gerakan relatif antara tautan yang berdekatan. Dalam konteks ini, tautan digunakan untuk merujuk pada anggota kaku yang menghubungkan sambungan untuk fungsi yang jelas dan memadai. Ini menunjukkan bahwa lengan robot industri menampilkan penggunaan kombinasi tautan dan sambungan untuk fungsionalitas yang optimal. Sangat penting untuk memastikan bahwa sambungan pada manipulator Anda bekerja sesuai untuk memastikan bahwa ada presisi dan akurasi saat dalam aplikasi.
Sendi robot juga kadang-kadang disebut sebagai sumbu. Mereka penting dan berguna untuk memastikan bahwa gerakan lengan tidak dibatasi atau diganggu. Mempelajari lebih lanjut tentang sambungan robot akan membantu Anda menentukan jenis lengan robot yang ingin Anda gunakan tergantung pada tugas yang ingin Anda tangani.
Jenis Sambungan Mekanik untuk Robot
Sumber:www. britannica.com
Mengingat bahwa ada berbagai jenis robot yang digunakan dalam industri manufaktur, Anda juga akan menemukan berbagai sambungan mekanis. Sendi ini berbeda dalam hal gerakan dan juga aplikasi terutama dalam hal jenis robot yang akan digunakan.
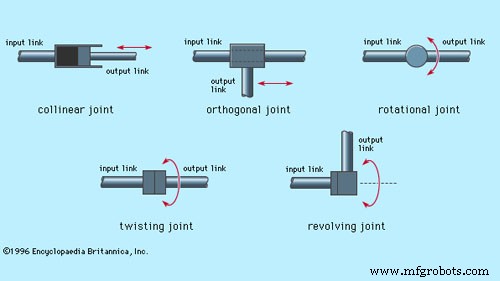
Ketika berbicara tentang sambungan mekanis yang ditampilkan dalam lengan robot, ada lima jenis utama yang perlu Anda pertimbangkan. Dua sambungan adalah linier yang berarti gerakan relatif antara tautan yang berdekatan adalah translasi. Di sisi lain, tiga lainnya berputar yang berarti gerakan relatif tautan melibatkan rotasi di antara mereka. Lima jenis sambungan mekanis untuk robot meliputi:
Sambungan Linier
Dalam sambungan linier, gerakan relatif yang ditampilkan oleh tautan yang berdekatan dimaksudkan untuk menjadi paralel. Ini berarti bahwa tautan input dan output meluncur dalam gerakan linier. Gerak semacam ini menghasilkan gerak translasi. Gerak linier semacam ini dapat dicapai dengan beberapa cara termasuk penggunaan mekanisme teleskopik dan piston. Jenis sambungan ini juga disebut sebagai sambungan L.
Sambungan Ortogonal
Sendi ortogonal juga populer disebut sebagai tipe O-sendi. Mereka menampilkan gerakan relatif yang diambil oleh tautan input dan tautan keluaran. Gerak yang terjadi pada sambungan Orthogonal ini adalah gerak geser translasi. Namun tidak seperti susunan sambungan linier, dengan sambungan Ortogonal, tautan keluaran tegak lurus dengan tautan masukan.
Sambungan Rotasi
Ketika datang ke sendi rotasi, Anda akan menemukan penggunaan gerakan relatif rotasi yang berguna untuk manipulator robot yang bekerja di banyak ruang kerja. Gerakan-gerakan ini dilakukan dengan sumbu rotasi tegak lurus terhadap sumbu tautan input dan output. Sambungan rotasi ini juga disebut sebagai sambungan Tipe R.
Memutar Sendi
Jenis sambungan ini memiliki gerakan berputar yang juga menghasilkan beberapa derajat rotasi saat digunakan. Gerakan pada sambungan ini relatif terhadap sumbu rotasi yang tegak lurus terhadap sumbu tautan input dan output. Sambungan puntir juga disebut sebagai sambungan tipe T.
Sambungan Bergulir
Dalam sendi berputar, hal-hal yang sedikit berbeda dibandingkan dengan yang lain. Sambungan ini juga menampilkan gerakan rotasi yang berguna dalam berbagai aplikasi. Gerakan sendi ini menampilkan gerakan di antara dua tautan. Sumbu tautan input dirancang sejajar dengan sumbu rotasi sambungan. Di sisi lain, sumbu tautan keluaran dirancang untuk tegak lurus terhadap sumbu rotasi sambungan. Jenis sambungan ini juga disebut sebagai sambungan Tipe V.
Berbagai Jenis Robot dan Sambungan Mekanik yang Digunakan

Sumber:www. technologyreview.com
Robot yang berbeda akan menampilkan penggunaan berbagai jenis sambungan mekanis. Mempelajari lebih banyak tentang robot yang berbeda akan menempatkan Anda pada posisi yang lebih baik untuk berinvestasi dalam robot yang sesuai untuk Anda. Beberapa robot yang paling umum untuk dipertimbangkan meliputi:
Articulated
Desain robot artikulasi kemungkinan besar akan hadir dengan rentang dan kombinasi sambungan putar yang berbeda. Rentang ini dapat menampilkan 2 struktur sambungan sederhana dan berpindah ke struktur yang lebih kompleks dengan 10 sambungan atau lebih. Dengan desain ini, lengan dihubungkan ke alas dengan menggunakan sambungan puntir sedangkan tautan di lengan dihubungkan dengan sambungan putar.
Cartesian
Dengan robot kartesius, desainnya menggunakan tiga sambungan linier. Sambungan ini ditampilkan pada bidang kartesius yang melibatkan X, Y, dan Z. Robot ini juga dapat menampilkan pergelangan tangan yang terpasang dengan sambungan rotasi yang lebih mudah untuk bergerak. Jenis robot khusus ini juga disebut sebagai bujursangkar atau gantry.
Silinder
Robot silindris memiliki sambungan putar yang dipasang pada alas dan satu sambungan linier yang digunakan untuk menghubungkan tautan yang berbeda. Mengingat bahwa robot silindris bekerja dalam ruang lingkup kerja berbentuk silinder, gerakan rotasi dan linier sangat berguna untuk memastikan bahwa presisi tercapai.
Polar
Dalam desain kutub robot, lengan dihubungkan ke pangkalan menggunakan sambungan memutar. Terkadang Anda juga akan menemukan penggunaan kombinasi dua sambungan putar dan satu sambungan linier. Karena robot ini juga disebut sebagai robot berbentuk bola, maka ruang lingkup pekerjaan yang akan ditampilkan juga berbentuk bola. Sumbu yang digunakan pada robot ini membentuk sistem koordinat kutub yang memungkinkan manipulator bekerja dengan mudah.
SCARA
Robot SCARA adalah pilihan populer di antara banyak produsen, terutama mereka yang ingin mengotomatiskan proses perakitan mereka. Robot ini biasanya berbentuk silinder dan bekerja dalam lingkup kerja yang relatif silinder. Ini fitur penggunaan dua sambungan paralel yang berguna dalam proses perakitan. Sambungan ini memberikan kepatuhan dalam satu bidang yang dipilih saat robot sedang digunakan.
Delta
Robot delta dirancang dengan bentuk seperti laba-laba yang memungkinkan mereka menawarkan layanan hebat kepada penggunanya. Mereka dibangun dari jajaran genjang yang bergabung dan terhubung ke basis yang sama. Sambungan yang ditampilkan pada robot jenis ini adalah rotasi dan linier. Hal ini memungkinkan robot untuk menggerakkan satu ujung perkakas lengan di area kerja berbentuk kubah. Ini meningkatkan kinerjanya untuk memastikan bahwa pengembangan tugas yang berbeda dilakukan secara akurat.
Kesimpulan
Saat bekerja dengan robotika sebagai sarana untuk mengotomatisasi berbagai proses dalam bisnis Anda, Anda perlu mengingat aspek yang berbeda. Aspek-aspek ini memainkan peran besar dalam kinerja robotika tertentu yang Anda pilih untuk digunakan. Saat menggunakan lengan robot industri, sambungan robot harus selalu diperbarui.
Kenali sendi yang berbeda dan bagaimana mereka mempengaruhi kinerja robot. Ini akan membantu Anda mengukur jenis sambungan yang paling sesuai untuk aktivitas yang ingin Anda otomatisasi. Setelah Anda memilikinya, Anda kemudian dapat berinvestasi dalam lengan robot yang datang dengan sendi tempat Anda berada di pasar. Luangkan waktu Anda dan bekerja dengan produsen peralatan otomasi yang akan membantu Anda.


