Robotics Singularity:Apa yang ada di Robotic Arms

Sumber:www. idtechex.com
Penggunaan lengan robot di industri manufaktur sedang meningkat dengan semakin banyak bisnis yang memanfaatkan manfaat dari penggunaan lengan robot. Jika Anda berencana untuk memasukkan lengan robot ke dalam proses bisnis Anda, maka Anda perlu memastikan bahwa Anda mendapat informasi yang baik. Carilah produsen lengan robot berkualitas yang dapat Anda ajak bekerja sama untuk mendapatkan hasil yang berkualitas.
Lengan robot menampilkan tubuh, pergelangan tangan, dan juga efektor ujung. Efektor akhir adalah apa yang digunakan untuk mempertahankan produk yang berbeda atau melakukan berbagai tugas. Dalam kebanyakan kasus, Anda memerlukan efektor akhir untuk bergerak ke arah yang berbeda dengan presisi. Di sinilah Anda perlu memastikan bahwa Anda menyadari singularitas robot dan bagaimana hal itu memengaruhi kinerja lengan robot Anda. Dalam artikel ini, kita akan membahas lebih dalam tentang singularitas robot dan mengapa penting untuk mengingatnya.
Apa itu Singularitas Robot

Sumber:www. technologyreview.com
Singularitas robot mengacu pada konfigurasi di mana gerakan ujung efektor robot terhalang ke arah tertentu. Konfigurasi ini menghasilkan batas efisiensi dan presisi lengan robot yang Anda gunakan. Umumnya, ketika datang ke lengan robot 6-sumbu, mereka bekerja dengan bergerak dalam gerakan relatif terhadap sumbu X, Y, dan Z dalam bidang 3D atau Cartesian. Ini terdiri dari 6 sendi yang berkontribusi pada 6 derajat kebebasan yang dialami oleh lengan robot saat beraksi.
Tingkat kebebasan ini memungkinkan lengan robot untuk bergerak ke arah yang berbeda dan dengan mudah mencapai tugas yang dirancang untuknya. Jika kebetulan, robot end-effector tidak dapat mencapai produk atau bergerak ke arah yang salah, di sinilah masalah singularitas masuk. Beberapa singularitas cukup mudah diidentifikasi dan dipecahkan sehingga Anda dapat kembali ke tugas. Namun, di sisi lain, beberapa robot akan mengalami singularitas yang lebih sulit untuk diidentifikasi kecuali dengan bantuan rumus yang rumit dan panjang.
Apa yang Mempengaruhi Singularitas Robot?
Sumber:www. mecademic.com
Singularitas robot akan menampilkan efek yang berbeda dan juga tantangan terutama ketika mengidentifikasi masalah tertentu. Tantangan ini bervariasi tergantung pada beberapa faktor yang ditampilkan pada lengan robot yang akan Anda tangani. Kompleksitas dan keparahan singularitas yang dialami robot Anda bergantung pada jumlah sambungan, jenis robot (linier atau putar), dan susunan geometrisnya.
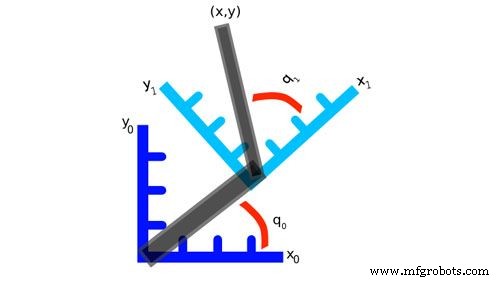
Lengan robot industri memiliki dua ruang yang dapat dikontrol dengan mudah. Ini biasanya ruang sendi dan ruang kartesius. Dengan ruang yang berbeda di mana lengan robot beroperasi, Anda akan menemukan bahwa itu akan menampilkan dua set perintah gerakan mode posisi.
Ketika datang ke perintah ruang bersama, robot akan menerima instruksi khusus dengan set ruang bersama yang diinginkan. Kemudian akan bergerak untuk membawa setiap sambungan ke posisi sambungan yang disarankan dalam translasi linier dan simultan. Dengan perintah ruang kartesius, saran ke robot akan menampilkan pose yang diinginkan untuk efektor akhir dengan jalur kartesius tertentu. Jalur kartesius dirancang untuk linier atau melingkar.
Agar robot menyelaraskan secara akurat dengan sendi dan perintah kartesius, pengontrol robot menghitung posisi terbalik dan kinematika kecepatan robot. Ini menghasilkan posisi yang tepat dari efektor akhir untuk melaksanakan tugas yang dirancang. Namun, jika perhitungannya salah maka singularitas terjadi di mana Anda menemukan efektor akhir tidak diposisikan secara akurat. Ini menunjukkan konfigurasi yang ingin Anda hindari untuk mencegah masalah singularitas menghalangi proses otomatisasi Anda.
Fungsi Singularitas Robot

Sumber:www. bermartabat.com
Singularitas robot yang diberikan harus dihindari dengan segala cara untuk memastikan bahwa lengan robot industri Anda dapat bekerja sebaik mungkin pada tugas yang diinginkan. Mempelajari lebih lanjut tentang fungsi singularitas robot akan memberi Anda pemahaman yang lebih baik tentang mengapa Anda harus menghindarinya. Singularitas robot terutama terkait dengan dua fungsi yang berbeda.
Penurunan dalam Pemetaan Kecepatan
Sumber:studywolf. wordpress.com
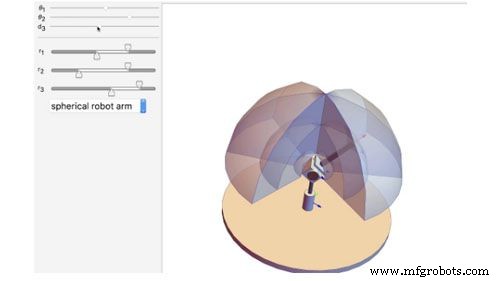
Pertimbangkan dua robot kartesius yang digunakan untuk mengarahkan efektor ujungnya ke arah yang berbeda. Kedua robot menampilkan pemosisian enam sumbu dengan tumpukan tiga pemandu linier ortogonal dan tiga tahap rotasi. Ketika robot yang digunakan dapat menjaga sumbu dan sambungan di tempat yang seharusnya, maka orientasi efektor akhir menjadi mudah.
Itu dapat terus menggunakan end-effector di sepanjang jalur 6D dalam ruang kerjanya sambil mempertahankan presisi dan akurasi. Namun, ketika sumbu dan sambungannya bertepatan, singularitas terjadi dan robot tidak lagi dapat bergerak dengan 6 derajat kebebasan yang dimilikinya.
Dengan robot ini, Anda menemukan bahwa ia tidak dapat memutar efektor ujungnya pada sumbu yang bertepatan dengan sambungan putar. Keunikan semacam ini sering disebut sebagai kunci gimbal. Mengingat bahwa sebagian besar singularitas diselesaikan dengan bantuan persamaan, Anda menemukan bahwa menjadi lebih sulit untuk menentukan kecepatan vektor kartesius tertentu. Ketika singularitas terjadi, hal itu menghalangi kemampuan Anda untuk mengetahui intensitas dalam angka yang terkait dengan kecepatan yang ditampilkan.
Mampu mengukur kecepatan lengan robot sangat penting untuk memastikan bahwa Anda mengamati keselamatan. Saat menghadapi masalah singularitas, Anda menemukan bahwa hal itu menimbulkan risiko besar pada robotika meskipun belum pada titik itu. Ini menghasilkan kecepatan sambungan tinggi yang mungkin berbahaya terutama jika Anda bekerja dengan robot industri besar dan cepat. Inilah sebabnya mengapa memetakan kecepatan yang Anda kerjakan sangat penting.
Batas Ruang Kerja Internal Terbatas
Sumber:Youtube
Ketika datang ke singularitas robot, hal itu tidak hanya mempengaruhi kinematika kecepatan terbalik tetapi juga mengalir ke persamaan kinematik posisi terbalik. Saat bekerja dengan robot industri, Anda akan menemukan bahwa mereka menampilkan persamaan dan solusi untuk posisi sambungan yang berbeda. Berbagai solusi yang ditampilkan terkait erat dengan jenis konfigurasi yang berbeda.
Misalnya, jika robot Anda memiliki 8 solusi unik untuk posisi sambungan hingga posisi efektor akhir, robot juga akan menampilkan 8 jenis konfigurasi yang berbeda. Untuk mengubah jenis konfigurasi Anda harus melalui singularitas. Singularitas adalah batas yang ditemukan di antara entitas 6D yang ditampilkan dalam ruang kerja kartesius adalah tipikal robot 6 sumbu. Ini membatasi konfigurasi berbeda yang dapat Anda capai dan batas ruang kerja yang tersedia untuk robot industri Anda.
Jenis Singularitas Robot dalam Robot yang Diartikulasikan Secara Vertikal

Sumber:blog. grabcad.com
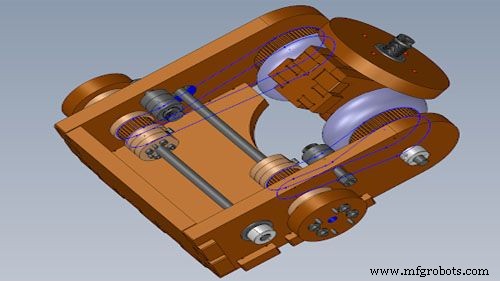
Mengingat fakta bahwa singularitas robot dapat terjadi di lengan robot industri mana pun yang Anda tangani, penting untuk menyadari bahwa ada berbagai jenis. Sama seperti lengan robot yang datang di bagian yang berbeda, singularitas juga akan mempengaruhi bagian yang berbeda ini sehingga menimbulkan berbagai masalah.
Di sini, penting untuk mengingat sumbu sambungan yang berbeda yang ditampilkan dalam lengan robot industri. Anda akan mengerjakan 2 dan 3 yang sejajar, 1 dan 4 yang normal untuk 2 dan 3, sumbu sambungan 5 yang normal untuk sambungan sumbu 4 dan 6. Sekarang setelah Anda memiliki pemahaman yang lebih baik tentang sumbu yang berbeda dan sendi Anda berada di tempat yang lebih baik untuk menjelajahi jenis singularitas. Jenis singularitas yang paling jelas dalam lengan robot yang diartikulasikan secara vertikal untuk dipertimbangkan meliputi:
Singularitas Pergelangan Tangan
Sumber:situs. google.com
Ketika datang ke lengan robot yang diartikulasikan secara vertikal dengan pergelangan tangan sejajar, mereka cenderung memiliki singularitas pergelangan tangan sebagai masalah yang paling umum. Jenis singularitas ini terjadi ketika sumbu sambungan 4 dan 6 bertepatan satu sama lain. Ketika ini terjadi, pergelangan tangan tidak dapat menggerakkan ujung efektor searah sumbu sambungan 5. Dalam penerapannya, pertimbangkan lengan robot industri yang bekerja secara akurat.
Untuk mengikuti garis melalui singularitas, sambungan 4 dan 6 harus simultan dan berputar pada 90 derajat. Ini akan dilakukan dalam arah yang berlawanan untuk memastikan bahwa prosesnya akurat. Ini menunjukkan bahwa melintasi singularitas pergelangan tangan adalah mungkin. Namun, begitu Anda mencapai singularitas, efektor ujung tetap tidak bergerak saat kedua sendi berputar. Agar efektor akhir dapat melewati singularitas, ia harus berhenti terlebih dahulu. Jika diterapkan, itu akan menghambat akurasi lengan industri saat bekerja. Ada banyak solusi untuk singularitas pergelangan tangan yang dapat dengan mudah diterapkan untuk memperbaiki masalah.
Singularitas Siku

Sumber:www. electronicsteacher.com
Jenis singularitas kedua yang mungkin Anda temui saat bekerja dengan lengan robot yang diartikulasikan secara vertikal dengan pergelangan tangan sejajar adalah singularitas siku. Ini terutama terjadi ketika pusat pergelangan tangan terletak pada bidang yang melewati sumbu sambungan 2 dan 3. Pusat pergelangan tangan digunakan untuk merujuk ke titik di mana sumbu sambungan 4, 5, dan 6 berpotongan. Dalam singularitas siku, Anda akan menemukan bahwa lengan terentang penuh dan mungkin juga menampilkan beberapa contoh di mana lengan tidak dapat dilipat sepenuhnya. Jenis singularitas ini sebagian besar ditentukan oleh sumbu dan posisi sambungan 3. Singularitas siku juga menampilkan beberapa solusi yang dapat membantu Anda memecahkan masalah kinerja apa pun yang mungkin Anda alami dengan lengan robot Anda. Jenis singularitas ini cukup sering terjadi dan dapat dengan mudah diprediksi dan juga dihindari.
Singularitas Bahu
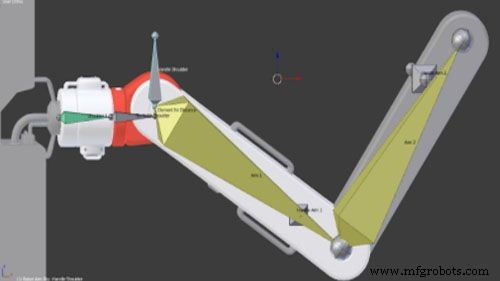
Sumber:blenderartists. org
Singularitas terakhir yang mungkin Anda temui adalah singularitas bahu yang terjadi ketika pusat pergelangan tangan robot terletak pada garis yang melewati sumbu sambungan 1 dan 2. Singularitas ini adalah yang paling kompleks di antara yang lainnya mengingat tidak bergantung pada posisi sendi tunggal. Dengan singularitas bahu, pembatasan ditempatkan pada gerakan searah sumbu sendi 2.
Dalam penerapannya, agar robot dapat mengikuti garis melalui singularitas bahu, sambungan 1 dan 4 harus berputar secara bersamaan pada sudut 90 derajat. Rotasi ini seperti pada singularitas pergelangan tangan dilakukan dalam arah yang berlawanan sementara efektor akhir tetap konstan. Seperti pada singularitas pergelangan tangan, gerakan melalui singularitas bahu dimungkinkan, namun efektor akhir harus berhenti untuk memungkinkannya. Keunikan ini juga menampilkan beberapa solusi yang dapat diterapkan untuk memastikan lengan robotik kembali bekerja dengan maksimal.
Jenis Singularitas dalam Robot Kolaboratif Enam Sumbu (Cobot)

Sumber:www. istockphoto.com
Ketika datang ke robot kolaboratif, Anda akan menemukan sumbu sambungan 2, 3, dan 4 yang sejajar, sumbu sambungan 1 berpotongan dan normal dengan sumbu sambungan 2. Selain itu, ia juga memiliki sumbu sambungan. 5 yang berpotongan dan normal terhadap sumbu sambungan 4 dan 6. Seperti singularitas pada robot artikulasi, robot ini juga menampilkan solusi yang berbeda relatif terhadap jenis konfigurasi yang berbeda. Jenis-jenis singularitas yang termasuk dalam Cobot antara lain:
Singularitas Pergelangan Tangan
Singularitas pergelangan tangan pada robot ini terjadi ketika sumbu sambungan 4 dan 6 menjadi sejajar. Dalam situasi ini, Anda mungkin menemukan bahwa sumbu sambungan 2, 3, 4, dan 5 dapat bergerak sementara efektor ujung tetap konstan.
Singularitas Siku
Pada robot ini, singularitas siku terjadi ketika sumbu sambungan 2, 3, dan 4 berada pada bidang yang sama. Ini sangat membatasi pergerakan efektor akhir dan pada gilirannya, mempengaruhi kinerja lengan robot.
Singularitas Bahu
Singularitas bahu terjadi ketika titik potong sumbu sambungan 5 dan 6 terletak pada bidang yang melewati sumbu sambungan 1 dan 2. Berikut adalah beberapa solusi yang dapat diterapkan untuk memperbaiki singularitas dan membuat robot industri bekerja.
Cara Menghindari Singularitas dalam Robotika

Sumber:www. ennomotive.com
Dengan efek yang berbeda, singularitas robot pada proses manufaktur, memiliki cara untuk menghindarinya sangat penting. Mengingat bahwa berbagai jenis robot, singularitas bervariasi tergantung pada jenis robot yang Anda gunakan, memiliki pemahaman dasar tentang cara menghindarinya akan memastikan bahwa proses Anda berjalan dengan mudah. Umumnya, singularitas hanya dapat dihindari dengan memastikan bahwa sel robot Anda dirancang dengan benar. Hal ini juga terlihat dari desain yang ditampilkan pada pelat adaptor yang Anda pilih untuk digunakan sebagai efektor akhir Anda.
Misalnya, jika Anda kebetulan mengonfigurasi lengan robot Anda dan tidak menetapkan lokasi pengambilan yang sesuai dengan singularitas pergelangan tangan, maka tidak banyak yang dapat Anda lakukan untuk memecahkan masalah tersebut. Dengan ini, satu-satunya hal yang harus dilakukan adalah memeriksa apakah pose tersebut dapat digunakan dalam aplikasi nonsingular. Selain itu, singularitas juga dapat dihindari dengan menambahkan sudut kecil pada perkakas. Ini sangat membantu mengurangi kemungkinan robot bergerak ke singularitas. Ini adalah teknik yang terutama digunakan oleh teknisi yang memahami mekanisme dan dapat mengubah solusi untuk keuntungan mereka.
Terakhir, singularitas juga dapat dihindari dengan mengambil pendekatan pemrograman dan matematika membantu Anda menangani berbagai hal. Dalam hal ini, Anda akan menemukan bahwa jumlah sumbu sangat dikurangi untuk menghindari singularitas. Ini terutama karena jumlah sumbu yang lebih tinggi meningkatkan kemungkinan terjadinya singularitas. Ingat, singularitas terjadi ketika sumbu sejajar satu sama lain menghalangi pergerakan lengan robot ke arah tertentu. Mengurangi jumlah sumbu juga mengurangi kemungkinan mereka menyelaraskan dan menyebabkan penyumbatan.
Kesimpulan
Singularitas robot adalah masalah besar yang dialami dalam aplikasi industri yang berbeda dari lengan robot dan peralatan otomasi lainnya. Berurusan dengan masalah ini sendiri dapat membuktikan menjadi hambatan itulah sebabnya Anda harus mencoba untuk menghindari singularitas robot. Namun, jika Anda mengalami masalah ini, Anda dapat menemukan solusi atau menyewa teknisi yang cerdas yang akan mengatasi masalah tersebut.
Atau, bangun hubungan kerja yang erat dengan produsen peralatan otomasi terkemuka yang akan membantu Anda ketika Anda menemukan singularitas. Luangkan waktu Anda untuk memastikan bahwa peralatan robot Anda bekerja dengan baik untuk membantu Anda sepenuhnya menyesuaikan dan memanfaatkan penggunaannya untuk bisnis Anda.


