Faktor utama dalam merancang kontrol kecepatan elektronik drone
Kunci dari desain drone adalah kemampuan untuk mengontrol kecepatan dan putaran motor. Kebanyakan drone ditenagai oleh motor DC brushless, yang membutuhkan pengaturan kecepatan dan arah rotasi yang konstan. Modul kontrol kecepatan elektronik (ESC) melakukan fungsi-fungsi ini dan mencakup tahap catu daya, sirkuit penginderaan arus, mikrokontroler, dan antarmuka komunikasi dengan sistem kontrol penerbangan, sehingga menjadikannya dasar untuk drone. Artikel ini membahas elemen penting yang perlu dipertimbangkan saat merancang ESC serta solusi pengembangan pasar.
Kontrol motor
Desain ESC memerlukan evaluasi dan analisis karakteristik yang cermat yang dapat diringkas sebagai berikut:
Baterai terpasang di drone
Motor
Anggaran yang tersedia
Kompatibilitas elektromagnetik (EMC) dan kekebalan interferensi
Dua jenis motor tanpa sikat dapat dipasang pada drone:motor arus searah tanpa sikat (BLDC) dan motor arus bolak-balik tanpa sikat (BLAC), juga dikenal sebagai motor sinkron magnet permanen (PMSM). Pilihan jenis motor yang akan digunakan dipengaruhi oleh algoritma kontrol yang dipilih, yang dapat berupa kontrol trapesium atau kontrol berorientasi medan (FOC). Algoritme kontrol motor trapesium memiliki karakteristik utama sebagai berikut:
Kontrol motor berdasarkan urutan switching enam fase
Deteksi sudut magnet rotor, digunakan untuk mengatur sudut yang benar; setiap langkah sesuai dengan sudut 60°
Dalam sistem kontrol tanpa sensor, sudut switching diperkirakan dengan mengukur tegangan fase EMF belakang
Algoritme kontrol FOC, di sisi lain, memiliki fitur berikut:
Kontrol motor melalui tegangan atau arus fase sinusoidal (FOC)
Deteksi sudut rotor dengan akurasi minimum 1° hingga 5 °, yang memastikan bahwa algoritme selalu mampu menghasilkan torsi maksimum
Dalam sistem kontrol tanpa sensor, sudut magnet motor diperkirakan dari tegangan dan arus fasa motor. Posisinya ditentukan dengan memantau parameter kelistrikan motor tertentu dan tanpa menggunakan sensor tambahan. Jenis yang paling umum digunakan pada drone adalah motor DC brushless karena ukurannya yang kecil, biaya yang relatif rendah, serta daya tahan dan kekokohan yang tinggi.
Kebanyakan drone memiliki setidaknya empat motor, versi empat motor yang paling banyak digunakan. ESC bertanggung jawab untuk mengontrol setiap kecepatan motor, dan oleh karena itu, arsitektur drone yang paling umum melibatkan penggunaan ESC khusus untuk setiap motor. Semua ESC harus dapat berkomunikasi satu sama lain, baik secara langsung maupun tidak langsung, melalui flight controller, sehingga dapat dengan mudah mengontrol drone. Arah setiap putaran motor juga penting:Dalam quadricopter, satu pasang motor berputar ke satu arah, sementara yang lain berputar ke arah yang berlawanan.
Teknik kontrol motor yang paling umum digunakan oleh pabrikan ESC adalah kontrol berorientasi lapangan, teknik yang mengontrol torsi dan kecepatan motor. Jika diterapkan dengan benar, FOC bahkan dapat menangani perubahan akselerasi yang cepat tanpa menimbulkan ketidakstabilan, memungkinkan drone untuk melakukan manuver yang rumit sambil memaksimalkan efisiensi.
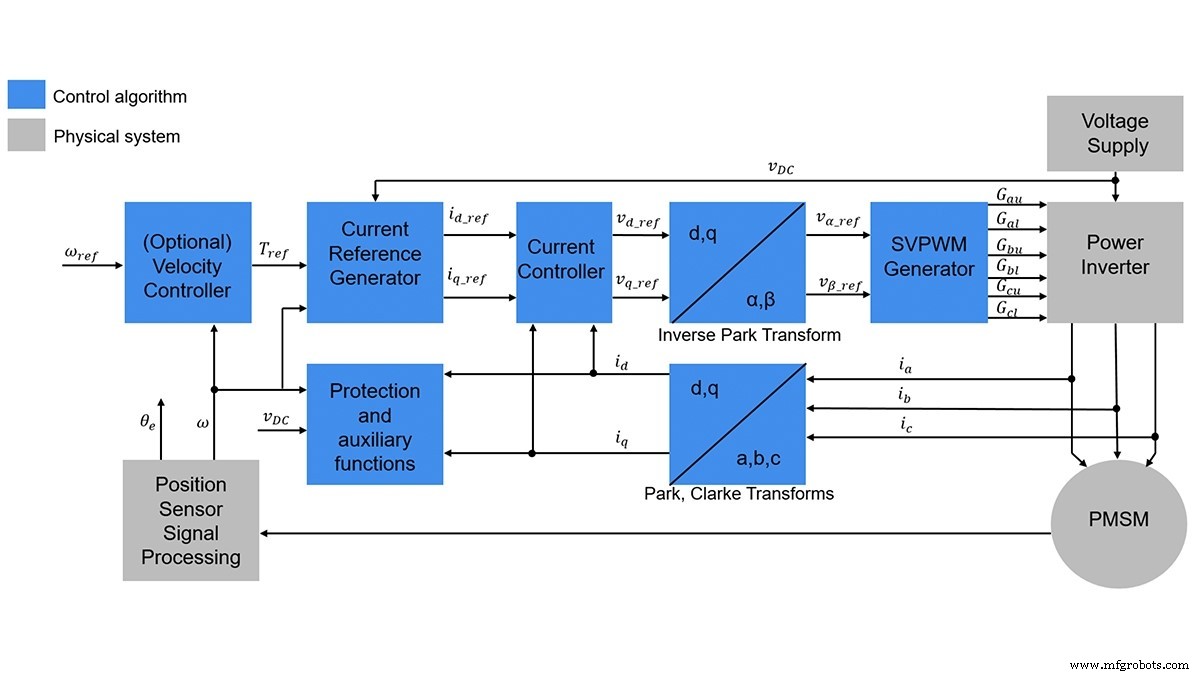
Diagram blok pada Gambar 1 di bawah ini menunjukkan arsitektur FOC yang mencakup komponen-komponen berikut:
Pengontrol arus yang terdiri dari dua pengontrol proporsional integral
Pengontrol kecepatan loop eksternal opsional dan generator arus referensi
Transformasi Clarke, Park, dan Park terbalik untuk konversi dari bingkai sinkron stasioner ke rotasi
Algoritme modulator vektor ruang untuk mengubah perintah vα dan vβ menjadi sinyal modulasi lebar-pulsa yang diterapkan ke belitan stator
Perlindungan dan fungsi tambahan, termasuk logika startup dan shutdown
Pengamat opsional untuk memperkirakan posisi sudut rotor jika diinginkan kontrol tanpa sensor
Gambar 1. Blok diagram kontrol berorientasi lapangan (Sumber:Mathworks)
Insinyur kontrol motor yang merancang FOC melakukan beberapa tugas, termasuk mengembangkan arsitektur pengontrol dengan dua pengontrol PI untuk loop arus, mengoptimalkan semua perolehan pengontrol PI untuk memenuhi persyaratan kinerja, dan merancang modulator vektor ruang untuk mengontrol PWM.
Setelah algoritma kontrol dipilih (trapesium atau FOC), langkah selanjutnya adalah memilih antara sistem kontrol loop terbuka atau loop tertutup. Dalam kontrol loop terbuka, motor sinkron (BLDC atau BLAC) digerakkan melalui sinyal kontrol dan diasumsikan mengikuti tindakan kontrol yang diperintahkan. Dalam sistem kontrol loop tertutup, rangkaian dapat memeriksa apakah motor bergerak sebagaimana dimaksud. Jika tidak, sistem kontrol secara otomatis mengkompensasi gerakan yang berlebihan atau kurang dengan mengurangi atau meningkatkan arus.
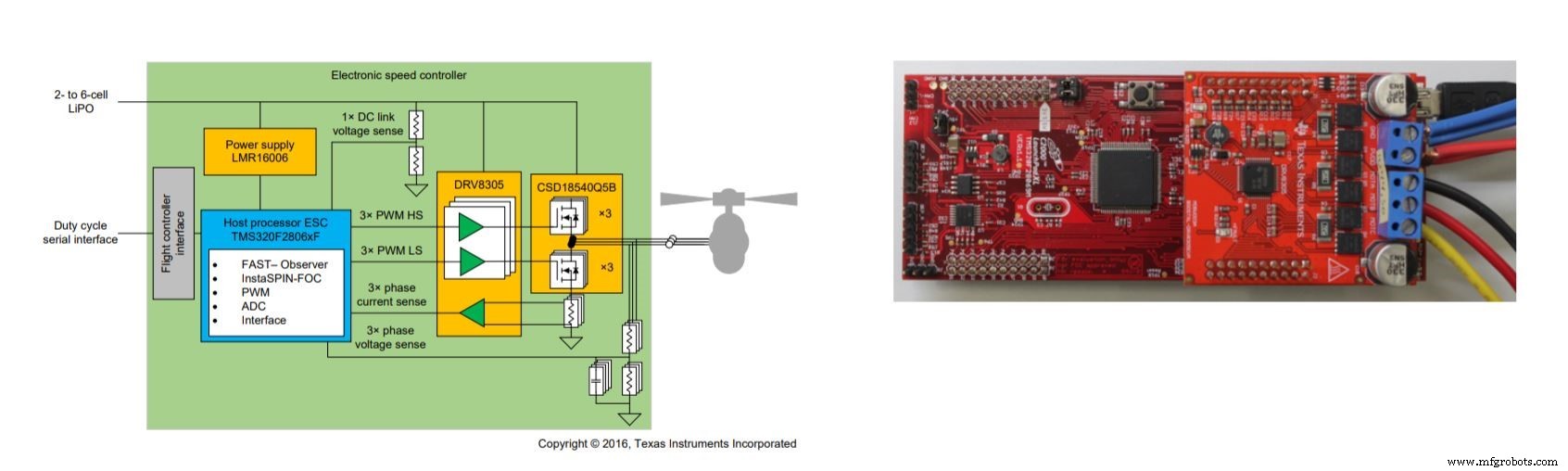
Saat menggunakan sistem kontrol loop tertutup atau loop terbuka (tanpa sensor), arus dan tegangan harus diukur untuk digunakan sebagai sinyal umpan balik. Gambar 2 menunjukkan pengaturan pengukuran tipikal, cocok untuk sistem kontrol trapesium dan sinusoidal. Dengan menggunakan kontrol trapesium dengan algoritme tanpa sensor, tegangan tiga fase digunakan oleh algoritme tanpa sensor untuk menghitung sudut rotor.
Gambar 2. ESC dengan kontrol motor tanpa sensor. Di sebelah kanan adalah Desain Referensi FOC Tanpa Sensor Berkecepatan Tinggi untuk ESC Drone oleh Texas Instruments, dan di sebelah kiri adalah diagram bloknya. (Sumber:Texas Instruments)
Dinamika quadcopter
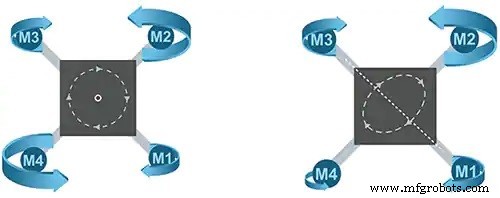
Kesederhanaan mekanis dan stabilitas aerodinamis drone terkait dengan penggunaan motor yang terkoordinasi dan manuvernya. Pada quadcopter, sepasang motor yang diposisikan pada diagonal struktur berputar ke arah yang sama tetapi berlawanan arah dengan dua motor lainnya. Jika keempat motor berputar dengan kecepatan yang sama, drone dapat naik, turun, atau tetap dalam penerbangan datar. Jika pasangan diagonal berubah lebih cepat dari yang lain, drone berputar di sekitar pusat gravitasinya dan tetap pada bidang horizontal yang sama (Gambar 3).
Gambar 3. Drone menggunakan kombinasi kecepatan rotor yang berbeda untuk melakukan manuver. (Sumber:STMicroelectronics)
Jika Anda mengubah kecepatan rotor kepala (atau ekor), drone akan mengarah ke atas atau ke bawah seperti pesawat sayap tetap yang sedang menyelam. Penyesuaian torsi kiri atau kanan akan menyebabkan drone berguling, menyebabkannya berputar pada porosnya. Terserah sistem kontrol penerbangan drone untuk mengubah kecepatan rotor yang sesuai untuk mencapai ketinggian penerbangan yang diperlukan untuk menyelesaikan manuver yang diinginkan.
Untuk insinyur kontrol, koreksi kecepatan adalah masalah umpan balik loop kontrol umum yang diselesaikan dengan pengontrol proporsional, integral, turunan (PID).
Merancang ESC
Merancang ESC untuk drone memerlukan komponen berkualitas tinggi yang dirancang khusus untuk mengontrol motor RPM tinggi (12.000+ RPM). Texas Instruments telah mengembangkan keluarga MCU, yang disebut InstaSPIN, yang menyederhanakan desain aplikasi kontrol motor tiga fase. InstaSPIN-FOC, cocok untuk sistem tanpa sensor, dilengkapi encoder perangkat lunak cepat dengan torsi dan kontrol kecepatan yang cocok untuk motor tiga fase apa pun. InstaSPIN-MOTION ditujukan untuk sistem tanpa sensor dan menyediakan kontrol posisi, kecepatan, dan torsi untuk motor tiga fase apa pun.
Sebuah desain referensi lengkap untuk cakupan ini disediakan oleh TI dan terdiri dari teknologi kontrol motor InstaSPIN-FOC dan InstaSPIN-MOTION. Platform ini mencakup mikrokontroler TI C2000 InstaSPIN 32-bit. Hal ini memungkinkan pengembang untuk mengidentifikasi, secara otomatis menyesuaikan, dan mengontrol motor tiga fase, dengan cepat menyediakan sistem kontrol motor yang stabil dan fungsional.
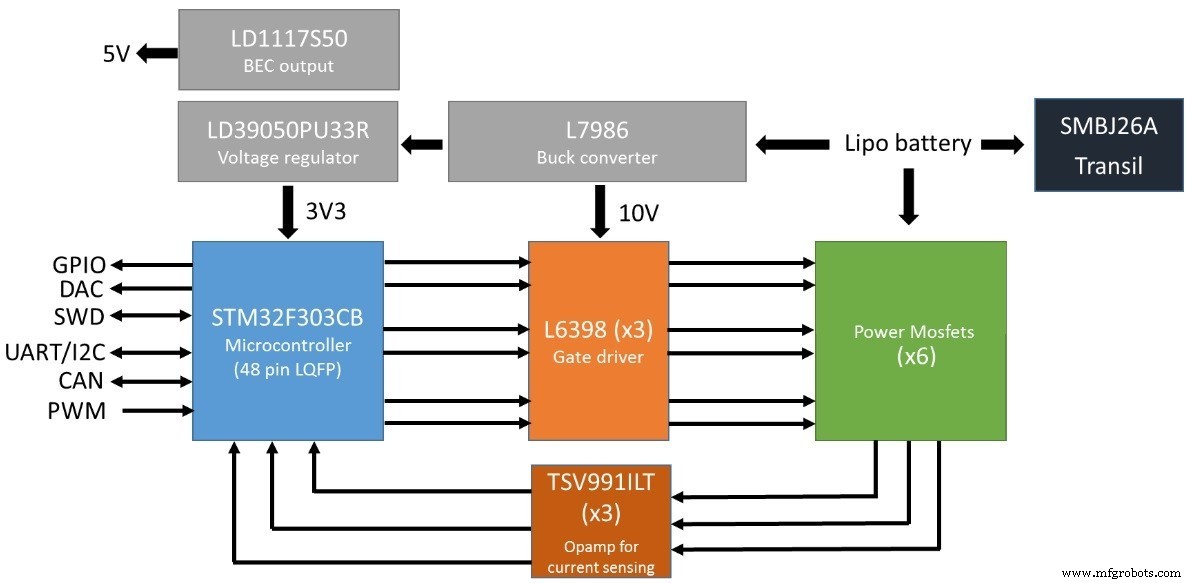
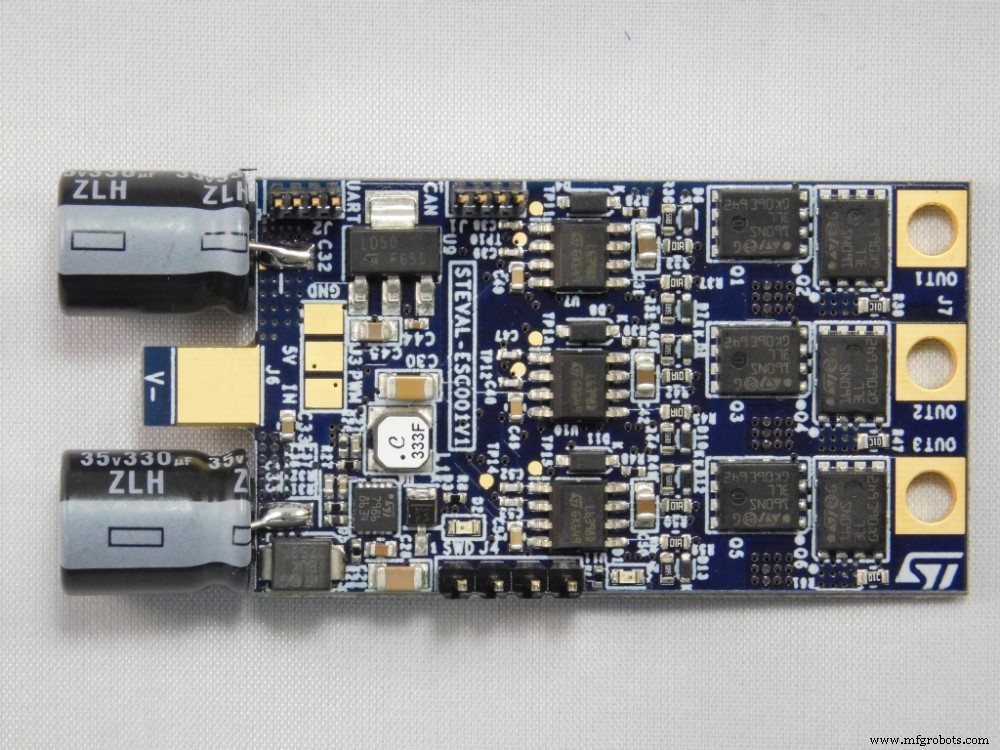
STMicroelectronics menawarkan desain referensi ESC lengkap, menerapkan algoritma FOC tanpa sensor. Desain referensi STEVAL-ESC001V1 ESC cocok untuk desain drone komersial tingkat pemula dan menggerakkan motor brushless tiga fase (atau PMSM) yang ditenagai oleh paket baterai LiPo 6S atau catu daya DC yang setara, hingga arus puncak 30 A. STEVAL-ESC001V1 memungkinkan desainer untuk mengembangkan aplikasi mereka dengan cepat berkat paket firmware pra-konfigurasi lengkap (STSW-ESC001V1), menerapkan algoritme terkontrol berorientasi bidang tanpa sensor dengan pembacaan arus tiga shunt, kontrol kecepatan, dan pengereman aktif penuh. Paket firmware/perangkat lunak STSW-ESC001V1 ditambah perpustakaan MC kit pengembangan perangkat lunak STM32 PMSM FOC memungkinkan pengoptimalan desain ESC dengan bertindak berdasarkan parameter FOC yang tertanam dalam MCU STM32 dan memanfaatkan profiler motor ST untuk mengambil parameter motor yang relevan dengan cepat. Algoritme FOC tanpa sensor ST dapat disesuaikan dengan aplikasi motor BLDC atau PMSM tiga fase, memberikan waktu terbang yang lebih lama dan kinerja dinamis yang optimal (Gambar 4 dan 5).
Gambar 4. Diagram blok larutan ST's STEVAL-ESC001V1 (Sumber:STMicroelectronics)
Gambar 5. Papan STEVAL-ESC001V1 ST (Sumber:STMicroelectronics)
Platform pengembangan drone HoverGames adalah solusi perangkat keras/lunak NXP modular dan fleksibel yang dapat digunakan untuk membangun kendaraan otonom apa pun, mulai dari drone dan rover hingga UAV. Kit pengembangan pada dasarnya didasarkan pada mikroprosesor dengan Linux dan Open CV dan berbagai sensor yang menyertainya untuk memandu penerbangan.
Flight controller memastikan drone tetap stabil. Papan ini open-source dengan kemungkinan untuk memasukkan sensor eksternal lainnya untuk mengoptimalkan operasi sesuai dengan fungsinya.
Baterai LiPo dan radio telemetri khusus negara harus diimplementasikan menggunakan salah satu koneksi IoT. Untuk fungsionalitas penuh dari kit, Anda harus memilih yang mana dari dua radio telemetri yang tersedia untuk dibeli. Melalui telemetri, Anda dapat memiliki koneksi langsung ke kendaraan selama penerbangan dan dapat melihat status drone selama penerbangan, memuat, dan mengontrol titik arah otonom dan membuat perubahan yang diperlukan. Data telemetri dikirim ke stasiun kontrol tetapi juga disimpan di dalam pesawat di unit penerbangan.
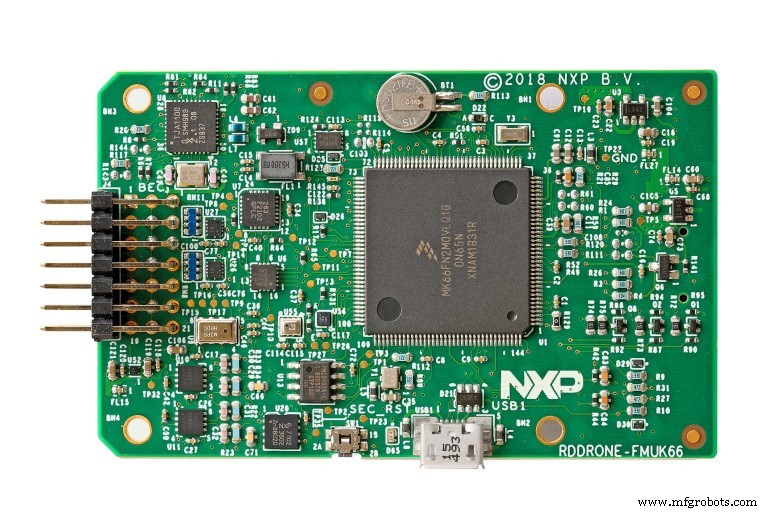
Komponen kit juga termasuk modul daya DC-ke-DC, modul GPS NEO-M8N dengan dudukan, sakelar pengaman, buzzer, LED status RGB terang, kabel SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3/papan breakout debug dengan kabel , motor brushless BLDC 2212 920 kV, dan pengontrol motor ESC 40 A OPTO (Gambar 6).
Gambar 6. Unit penerbangan RDDRONE-FMUK66 (Sumber:NXP)
>> Artikel ini awalnya diterbitkan pada situs saudara kami, Power Electronics News.
Konten Terkait:
Merancang pengontrol kecepatan elektronik untuk drone
Drone terus bergerak dengan solusi pengisian daya nirkabel
Sensor LiDAR mendukung pencitraan resolusi tinggi di UAV
Kit pengembang menawarkan platform untuk daya digital, desain kontrol motor
Merancang kontrol motor untuk sistem robot
Penggabungan sensor membawa banyak manfaat
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tersemat.