Apa itu Pengemudi Sikloid? Merancang, Pencetakan 3D, dan Pengujian
Dalam tutorial ini kita akan mempelajari apa itu cycloidal drive, cara kerjanya, menjelaskan cara mendesain model kita sendiri dan model 3D print sehingga kita dapat melihatnya secara langsung dan lebih memahami cara kerjanya.
Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini.
Apa itu Drive Cycloidal?
Penggerak sikloidal adalah jenis peredam kecepatan unik yang memberikan rasio reduksi yang sangat tinggi dengan desain yang ringkas namun kokoh. Dibandingkan dengan penggerak roda gigi konvensional, seperti memacu dan planetary, ia dapat mencapai jatah pengurangan yang jauh lebih tinggi hingga 10 kali lipat dalam ruang atau tahap yang sama. Selain itu, fitur ini hampir tidak ada reaksi balik, kapasitas beban lebih tinggi, kekakuan, dan efisiensi tinggi hingga 90%. Properti ini membuat drive cycloidal cocok untuk banyak aplikasi di mana akurasi dan kinerja pemosisian penting seperti robotika, peralatan mesin, peralatan manufaktur, dan sebagainya.
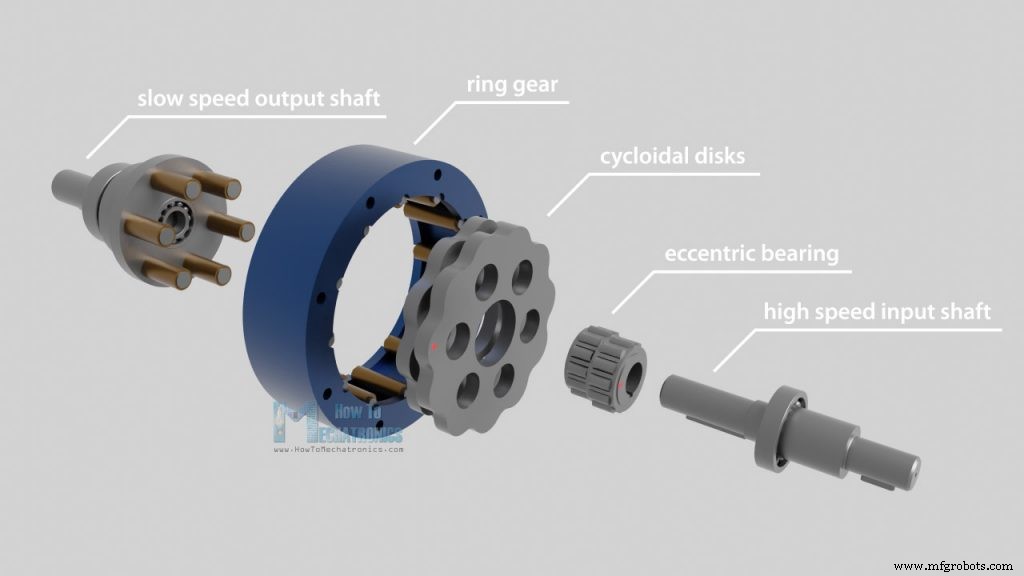
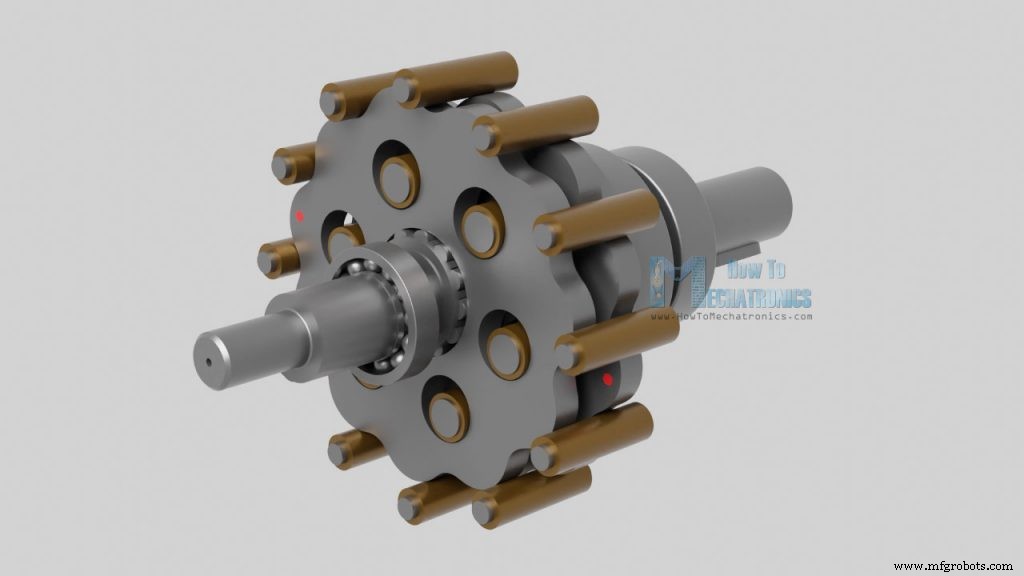
Mari kita lihat sekarang apa yang ada di dalam dan bagaimana drive cycloidal bekerja. Drive cycloidal terdiri dari lima komponen utama, poros input berkecepatan tinggi, bantalan eksentrik atau cam cycloidal, dua disk cycloidal atau pengikut cam, roda gigi ring dengan pin dan rol, dan poros keluaran kecepatan lambat dengan pin dan rol.
Poros input menggerakkan bantalan eksentrik, dan bantalan eksentrik menggerakkan cakram sikloidal di sekitar keliling internal rumah ring gear. Gerakan eksentrik membuat gigi atau lobus cakram cycloidal terhubung dengan rol rumah roda gigi cincin sedemikian rupa sehingga menghasilkan rotasi terbalik pada kecepatan yang dikurangi.
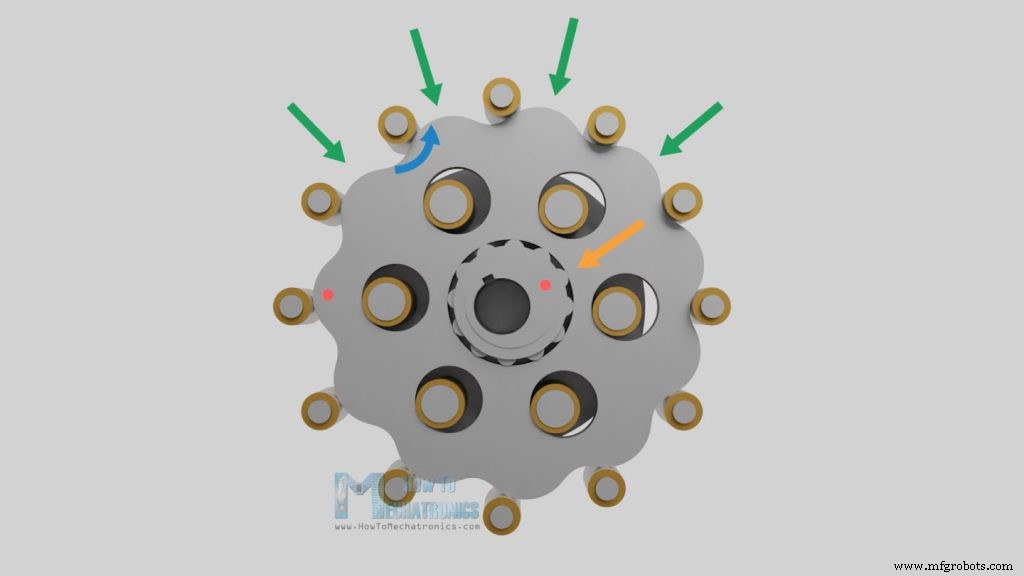
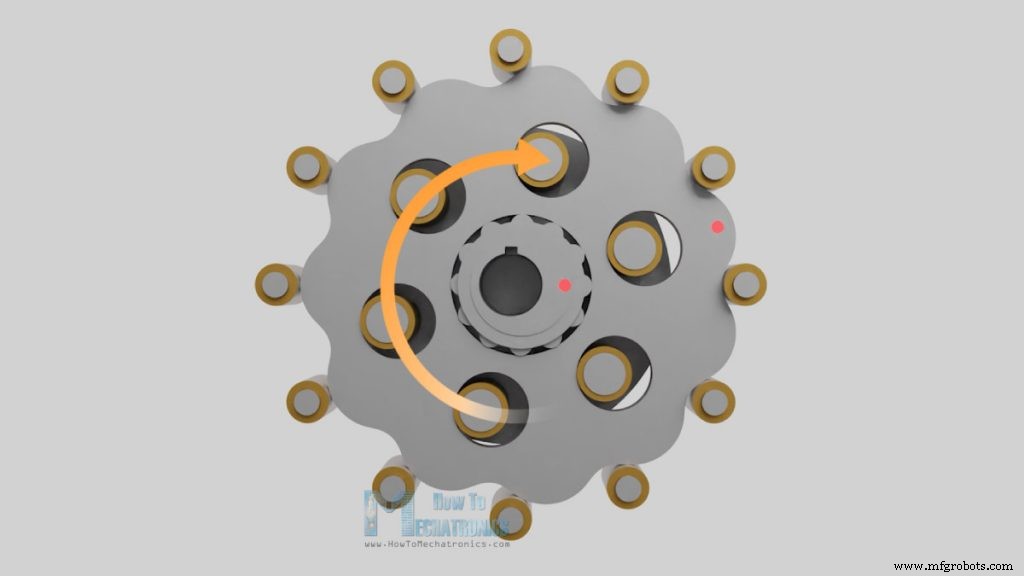
Kita dapat melihat lebih dekat di sini dan melihat bahwa bantalan eksentrik sebenarnya mendorong cakram cycloidal terhadap roller roda gigi cincin.
Karena bentuk piringan yang unik dan posisinya relatif terhadap rol roda gigi cincin, kita dapat melihat bahwa saat bantalan eksentrik berlangsung, lobus cakram di depan putaran tidak akan dapat melewati atau melompati roda gigi cincin berikutnya, tetapi sebaliknya itu akan tergelincir atau berguling ke belakang. Perilaku inilah yang sebenarnya menyebabkan rotasi terbalik pada disk.
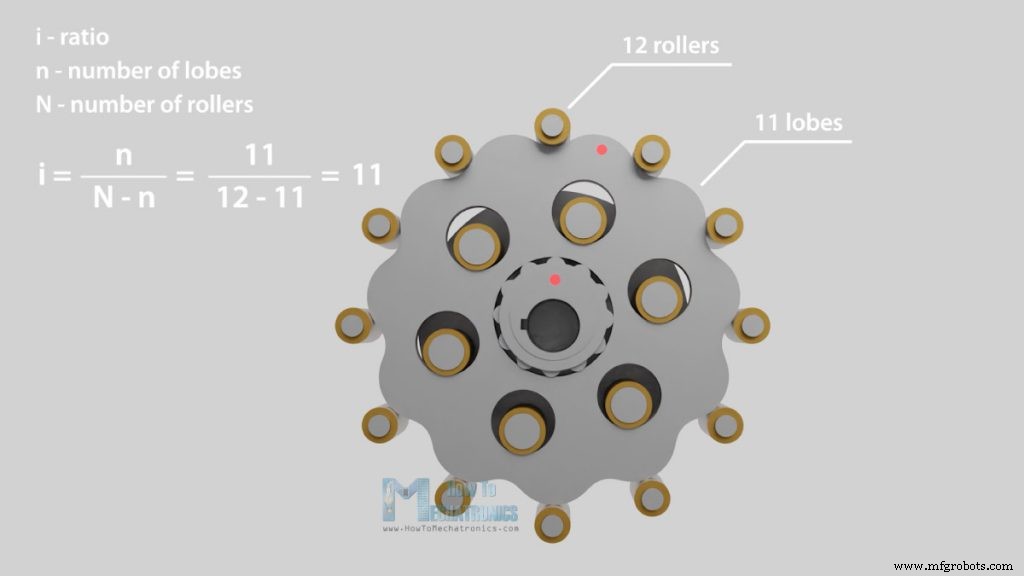
Secara umum, ada satu lobus cycloidal yang lebih sedikit pada disk dibandingkan dengan jumlah pin pada rumah ring gear. Hal ini membuat, untuk satu putaran penuh bantalan eksentrik, cakram sikloidal hanya bergerak sejauh satu lobus. Dari sini kita dapat melihat bahwa rasio reduksi hanya bergantung pada jumlah pin ring gear.
Misalnya, di sini kita memiliki 12 pin pada ring gear, yang berarti 11 lobus pada disk cycloidal, dan itu adalah rasio 11:1, atau kecepatan output 11 kali lebih lambat. Ukuran disk, rol roda gigi cincin, atau bantalan eksentrik tidak mempengaruhi jatah reduksi sama sekali.
Rotasi yang dikurangi ditransmisikan ke pin poros keluaran melalui lubang di cakram sikloidal.
Ada dua piringan cycloidal, ditempatkan 180 derajat di luar fase untuk mengkompensasi gaya ketidakseimbangan yang disebabkan oleh gerakan eksentrik dan memberikan operasi yang lebih mulus pada kecepatan yang lebih tinggi.
Nama drive Cycloidal berasal dari profil disk yang pada gilirannya berasal dari cycloid, tetapi lebih lanjut tentang itu di bagian video berikutnya di mana kita akan merancang drive cycloidal kita sendiri.
Cara mendesain Drive Cycloidal
Jadi, sekarang seperti yang kita ketahui cara kerja cycloidal drive, kita dapat melanjutkan dengan merancang model kita sendiri yang akan dapat kita cetak 3D. Jika kita mencoba mencetak 3D contoh demo ini, mungkin berhasil, tetapi akan cepat gagal karena bahan cetak 3D tidak cukup kuat untuk menahan gaya dan gesekan yang muncul di kotak roda gigi.
Bagian penting adalah rol yang biasanya merupakan busing yang merupakan pilihan bagus jika bahannya logam, tetapi dengan bahan PLA kita harus menggunakan bantalan bola sebagai gantinya.
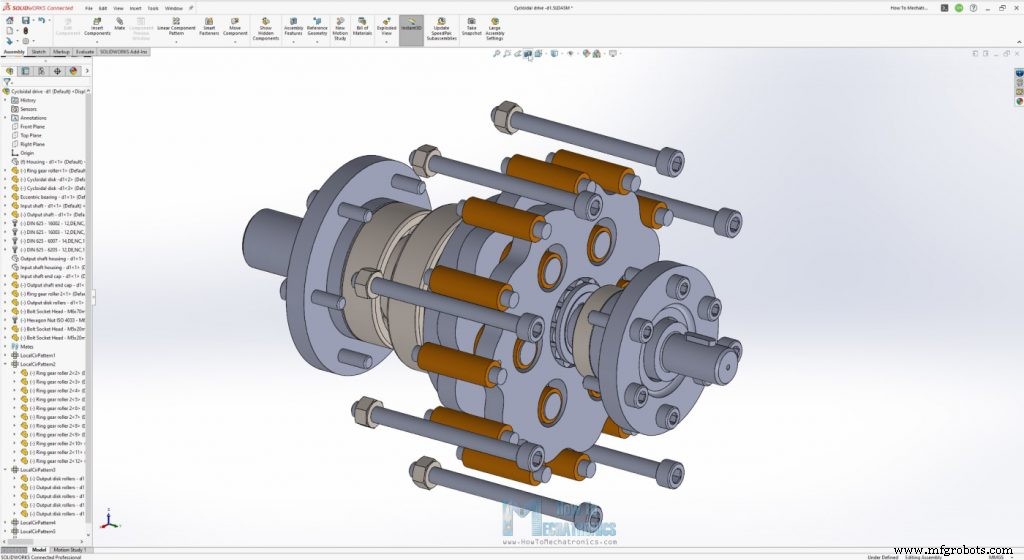
Mengingat hal itu, inilah drive cycloidal yang saya rancang dan gunakan bantalan bola untuk roller.
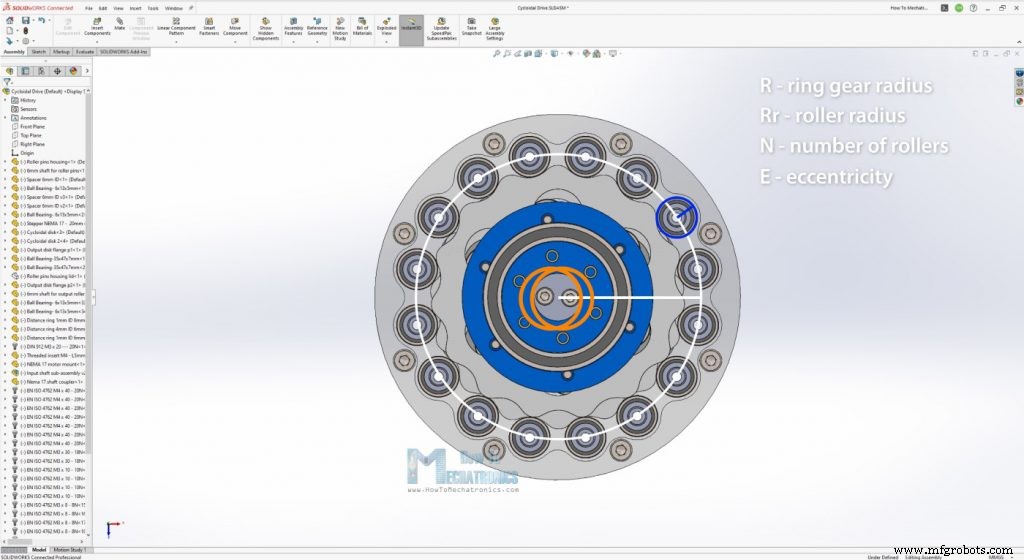
Saat merancang penggerak sikloidal, ada empat parameter masukan utama yang menentukan ukuran dan bentuk cakram sikloidalnya, dan itu adalah jari-jari ring gear, radius roller, jumlah roller ini, dan eksentrisitas.
Model 3D Drive Cycloidal DIY
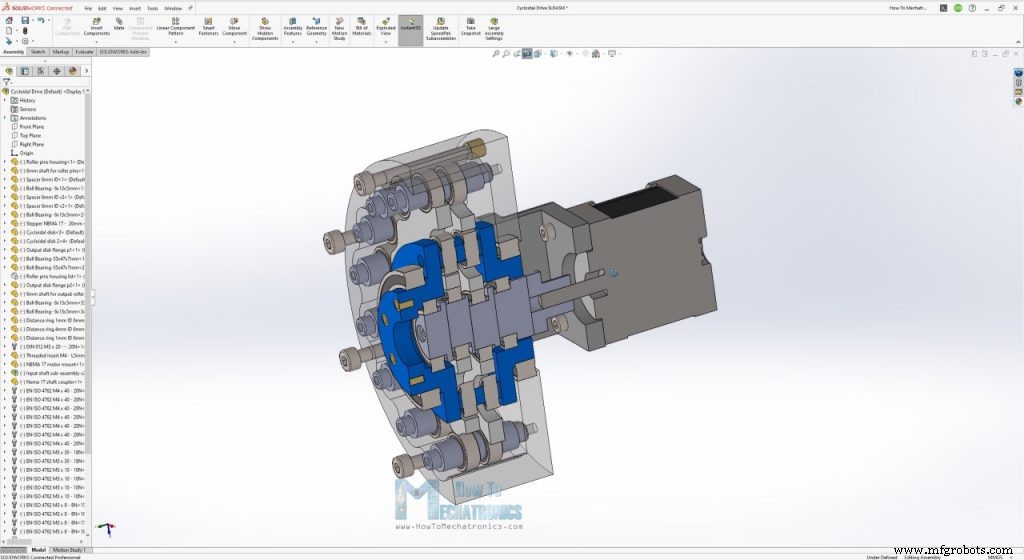
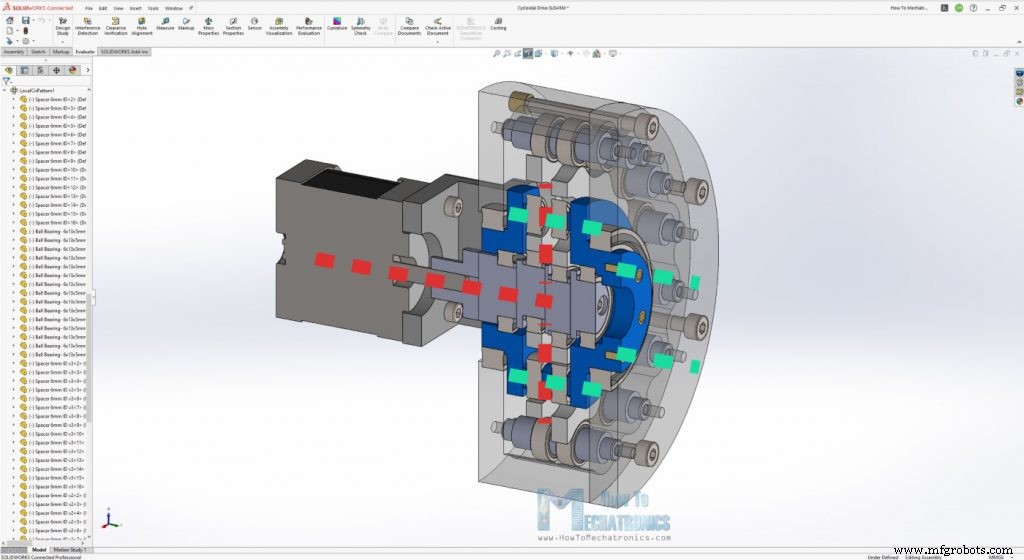
Berikut drive cycloidal yang saya rancang menggunakan SOLIDWORKS dan menggunakan bantalan bola untuk roller.
Pada titik ini izinkan saya memberikan teriakan kepada SOLIDWORKS untuk mensponsori proyek ini. Pernahkah Anda mendengar tentang 3DEXPERIENCE World; acara tahunan yang diselenggarakan oleh SOLIDWORKS?
3DEXPERIENCE World 2022 menyatukan komunitas desainer, insinyur, wirausahawan, dan pembuat yang dinamis untuk belajar, bertemu satu sama lain, berbagi pengetahuan bersama tentang teknologi terbaru dan praktik terbaik.
Pastikan untuk mendaftar hari ini di SOLIDWORKS.COM/3DXW22_HOWTOMECH , dan hadiri secara virtual secara gratis.
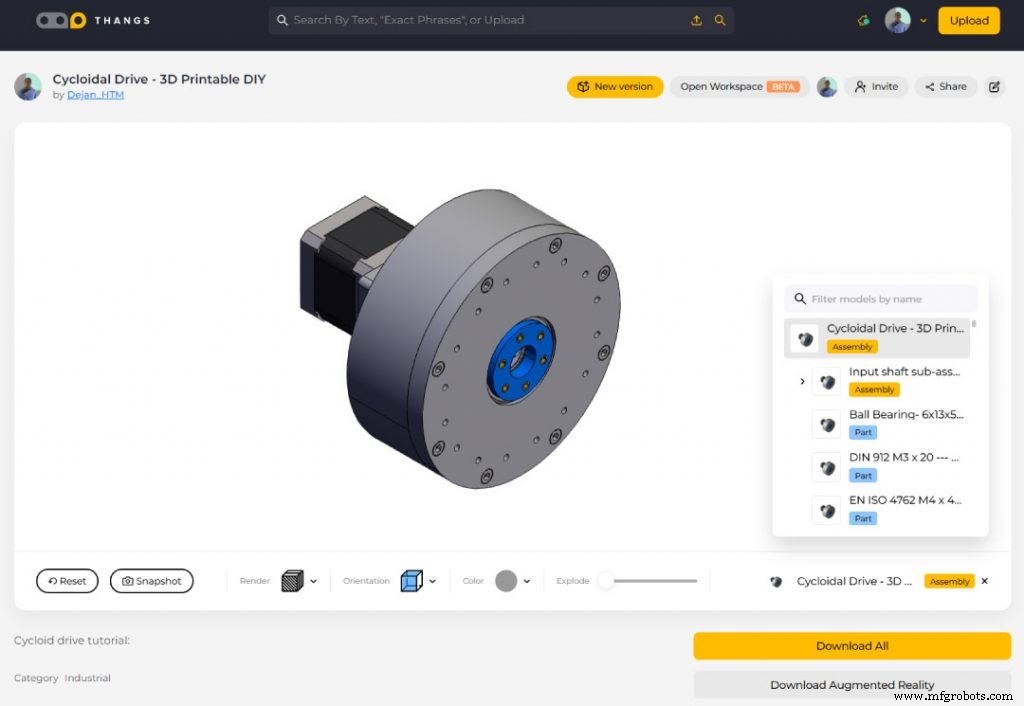
Namun demikian, Anda dapat menemukan dan mengunduh model 3D ini sebagai file STEP, serta menjelajahinya di browser Anda di Thangs:
Anda dapat mengunduh file .STEP model 3D dari Thangs.
Terima kasih Terima kasih telah mendukung tutorial ini.
Sedangkan untuk file STL yang digunakan untuk mencetak part 3D, anda dapat mendownloadnya disini:
Proyek Terkait
Apa itu Strain Wave Gear alias Harmonic Drive? Perlengkapan Sempurna Untuk Aplikasi Robotika!?
Merancang
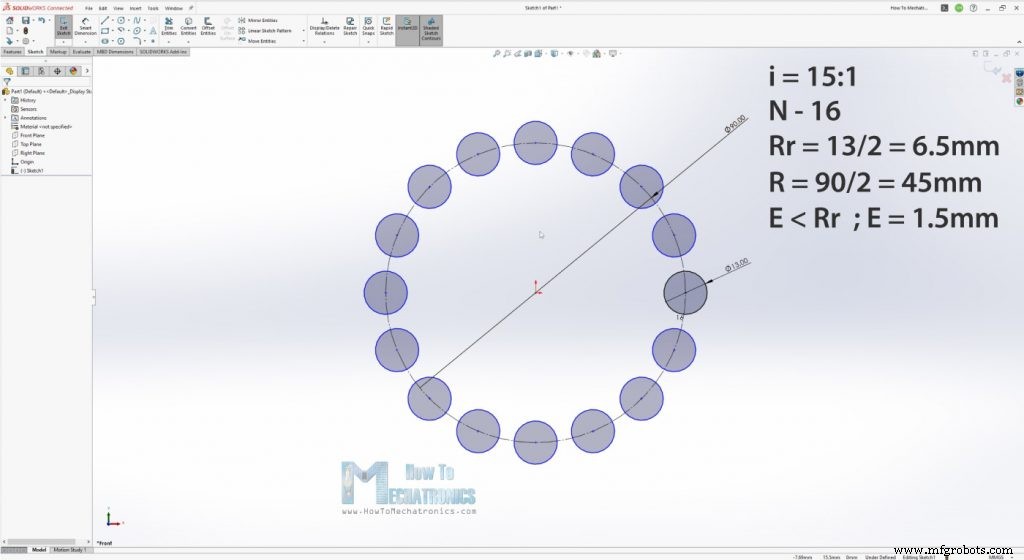
Hal pertama yang saya tentukan adalah saya menginginkan rasio reduksi 15:1 untuk gearbox ini, yang berarti saya membutuhkan 16 ring gear roller. Jadi, saya menggambar sketsa di SOLIDWORKS dengan 16 rol mengelilingi lingkaran.
Kemudian saya memilih untuk menggunakan bantalan untuk roller dengan diameter luar 13mm. Sekarang menurut kedua parameter ini saya dapat menentukan ukuran diameter pitch ring gear yang seharusnya. Saya set ke 90mm. Nilai eksentrisitas harus lebih kecil dari setengah diameter roller, dan saya memilih nilai 1,5mm.
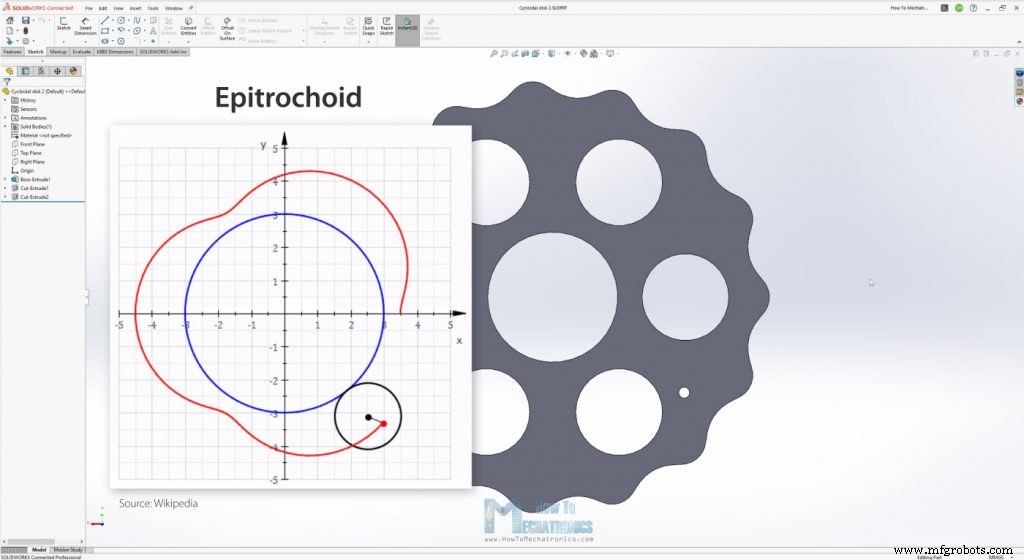
Sekarang kita memiliki empat parameter input utama, kita dapat menggambar bentuk atau profil dari piringan cycloidal. Seperti yang saya sebutkan, profil disk berasal dari Cycloid, yang merupakan kurva yang dilacak oleh sebuah titik pada lingkaran saat menggelinding sepanjang garis lurus tanpa tergelincir, atau variasinya, Epicycloid yang dilacak saat menggelinding pada keliling lingkaran .
Ada variasi lain yang disebut Epitrochoid, di mana titik tracing berada pada jarak dari pusat lingkaran luar dan itulah yang sebenarnya didasarkan pada profil disk cycloidal.
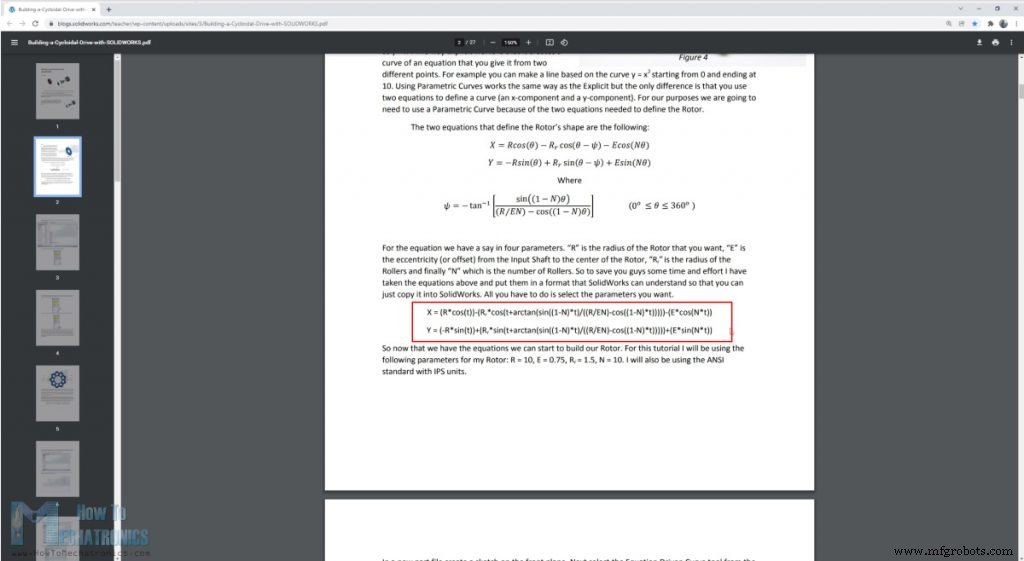
Untuk menggambar kurva seperti itu, kita dapat menggunakan persamaan parametrik ini di sini tetapi ada juga parameter lain yang harus disertakan di dalamnya, seperti diameter roller dan eksentrisitas. Ini sedikit menyulitkan, tapi untungnya ada dokumen bagus yang ditulis oleh Omar Younis untuk blog SOLIDWORKS Education, di mana ia menggabungkan semua parameter ini dalam persamaan parametrik X dan Y tunggal.
Berikut persamaannya:
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)
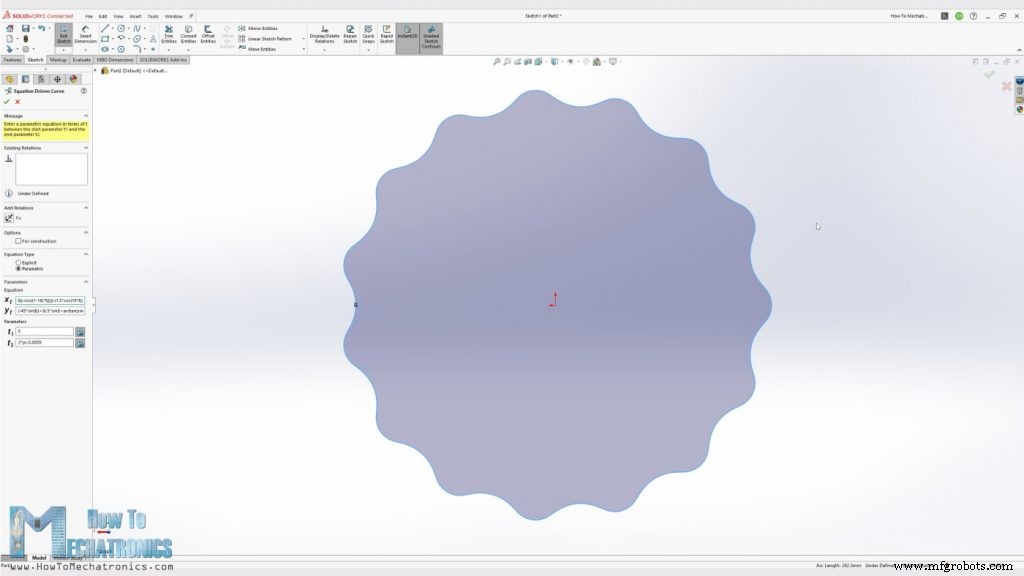
Sekarang untuk menghasilkan profil kita cukup menggunakan alat Kurva Didorong Persamaan SOLIDWORKS, masukkan dua persamaan dengan tepat dan itu akan menghasilkan profil disk cycloidal. Tentu saja, untuk parameter input kita harus memasukkan nilai kita.
Perhatikan juga bahwa kurva tidak akan dihasilkan jika parameter “t” adalah dari 0 hingga 2*pi atau 360 derajat. Jadi, kita perlu mengatur parameter t2 sedikit lebih pendek dari 2*pi, dan kemudian menghasilkan kurva dengan celah kecil yang dapat kita sambungkan menggunakan spline sederhana.
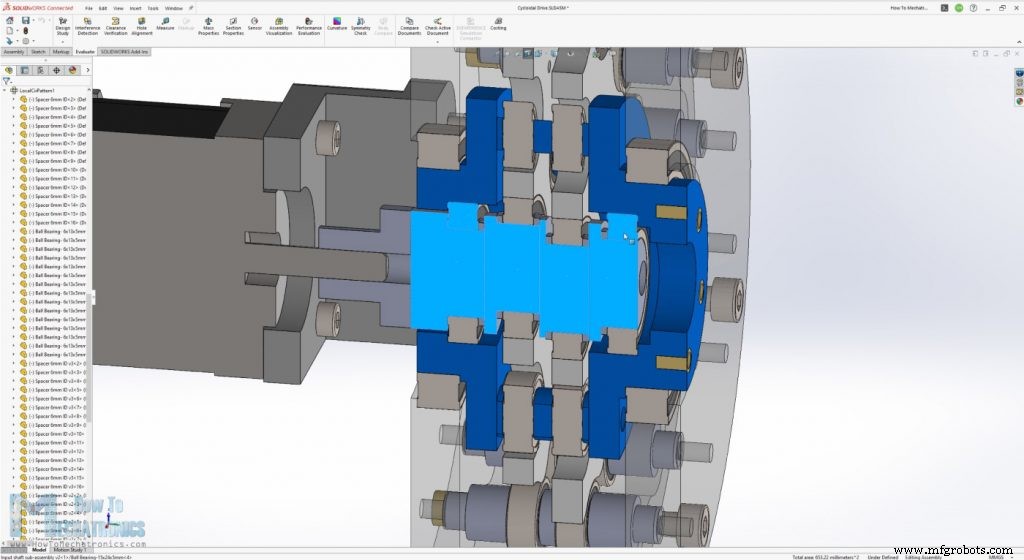
Sekarang setelah kami menentukan parameter utama drive cycloidal kami, sisanya hanya menemukan solusi teknis untuk bagaimana semuanya akan terhubung. Sekali lagi, mengingat kami menggunakan bahan cetak 3D yang tidak terlalu kuat, saya merancang poros rol untuk ditopang di kedua sisi, serta poros input dan poros output.
Poros input terbuat dari beberapa bagian dan didukung dengan dua bantalan di dalam poros output. Poros keluaran juga didukung dengan dua bantalan di dalam rumahan.
Jadi, untuk meringkas kerja gearbox ini, input dari motor ditransmisikan ke poros input eksentrik yang menggerakkan disk cycloidal di sekitar ring roda gigi.
Gerakan mundur yang dihasilkan ditransmisikan ke poros keluaran melalui rol poros keluaran. Selesai, sekarang mari kita cetak 3D dan lihat cara kerjanya di kehidupan nyata.
Pencetakan 3D
Saat mencetak bagian 3D, penting untuk menggunakan fitur Hole Horizontal Expansion di perangkat lunak slicing Anda.
Biasanya, lubang bagian cetakan 3D lebih kecil dari ukuran aslinya, sehingga dengan fitur ini kita dapat menyusunnya dan mendapatkan dimensi yang akurat yang sangat penting untuk bagian ini. Saya mengatur milik saya ke 0,07mm, dan juga dapat Ekspansi Horisontal yang mengkompensasi dimensi luar bagian, menjadi 0,02mm. Tentu saja, Anda harus melakukan beberapa uji cetak untuk melihat nilai apa yang akan memberi Anda hasil terbaik pada printer 3D Anda.
Memasang Gearbox Cycloidal
Jadi, inilah semua bagian yang dicetak 3D, serta bantalan dan baut yang diperlukan untuk merakit drive cycloidal.
Berikut daftar semua komponen yang diperlukan untuk merakit drive cycloidal ini:
Bantalan bola 6x13x5mm 686-2RS – x44 …….. /
Bantalan bola 15x24x5 6802-2RS – x4 ………….. /
Bantalan bola 35x47x7 6807-2RS – x2 ………….. Amazon /
Batang baja 6x35mm ……………………………………….. /
Insersi berulir …………………………………………. /
Baut M3 dan M4 dari toko perangkat keras lokal Anda – Saya akan menyertakan daftar lengkap baut yang diperlukan untuk proyek ini dalam beberapa hari
Saya mulai dengan memasukkan pin ring gear ke housing. Pin ini mengakomodasi rol atau bantalan roda gigi cincin tetapi diameternya hanya 6mm. Saya tidak yakin apakah mereka cukup kuat untuk tidak pecah di bawah beban cakram cycloidal.
Oleh karena itu, saya membuatnya berlubang, dan memasukkan ke dalamnya poros logam 3mm yang telah saya letakkan di sekitar. Dengan cara ini pin pasti akan cukup kuat. Tentu saja, ada solusi yang lebih cerdas untuk ini. Misalnya, kita bisa menggunakan baut M6, tetapi yang tidak saya sukai adalah baut M6 sedikit lebih kecil dari 6mm, sehingga bantalannya akan goyah. Idealnya, di sini kita bisa menggunakan batang 6mm yang tepat, yang sebenarnya mudah tersedia untuk dibeli bahkan dengan ukuran 35mm ini.
Setelah kita menempatkan semua pin di tempatnya, kita dapat memasukkan bantalan dalam urutan ini, ring jarak 7mm, bantalan, lalu ring jarak 3mm, bantalan, dan ring jarak 7mm lainnya.
Drive cycloidal sekarang harus sesuai dengan ring gear yang kita buat ini, dan jika kita mencoba untuk menggerakkan putar disk dengan gerakan eksentrik, dengan mendorong ke samping sambil berputar, disk akan mulai berputar secara terbalik.
Selanjutnya, kita dapat merakit poros input yang terbuat dari empat bagian. Di setiap bagian kita perlu menempatkan bantalan dan beberapa cincin jarak, dan karena eksentrisitas kita tidak akan dapat melakukannya kecuali poros dibuat dalam beberapa bagian.
Untuk menghubungkan bagian bersama-sama, saya menggunakan dua baut M3 yang melewati semuanya. Dapat kita perhatikan di sini bahwa lubang untuk baut M3 ini dibuat sedikit lebih kecil dari baut M3 sehingga baut akan membuat ulir di dalamnya dan lebih kencang.
Beginilah tampilan poros saat dirakit, tetapi saya sebenarnya harus memasukkan cakram cycloidal dan sekarang saya tidak bisa melakukannya. Jadi, saya membongkarnya dan memasangnya lagi dengan disk yang dimasukkan juga.
Saya melanjutkan dengan merakit poros keluaran. Di sini kita perlu memasang rol atau bantalan keluaran, dan kita melakukannya dengan cara yang sama seperti yang ditunjukkan untuk rol roda gigi cincin. Pin 6mm, dengan bantalan 13mm dan beberapa cincin jarak dimasukkan melalui beberapa baut M3 sepanjang 20mm.
Saat memasukkan rol keluaran ini melalui bukaan cakram sikloidal, penting untuk memposisikan kedua cakram relatif satu sama lain 180 derajat di luar fase. Untuk membantu ini, saya membuat lubang kecil pada kedua disk 180 derajat di luar fase, jadi di sini kita hanya perlu mencocokkannya dan kita bisa memasukkan rol melaluinya.
Harap diperhatikan bahwa ini sedikit pas, tetapi jika dimensi lubangnya akurat, kami akan dapat menyesuaikannya.
Sekarang kita dapat mengamankan pin ini ke flensa lain di sisi lain, tetapi untuk tujuan itu pertama-tama kita perlu memasang beberapa sisipan berulir ke dalam flensa. Saya menggunakan sisipan berulir ini agar seluruh rakitan menjadi lebih ringkas.
Jadi, setelah poros input dan output dirakit bersama, kita dapat memasang seluruh rakitan ini ke dalam housing melalui bantalan dengan diameter luar 47mm.
Kemudian kita dapat memasang satu bantalan lagi seperti ini di bagian depan poros, dan memasukkan tutup rumah di tempatnya. Ini juga sangat pas karena semua 16 pin harus pas di slot tutup rumah, jadi kita harus menggunakan sedikit tenaga untuk memasukkannya.
Di sisi belakang rumahan, saya memasang beberapa sisipan berulir M4, lalu mengencangkan penutup dan wadahnya bersama dengan beberapa baut M4 40mm.
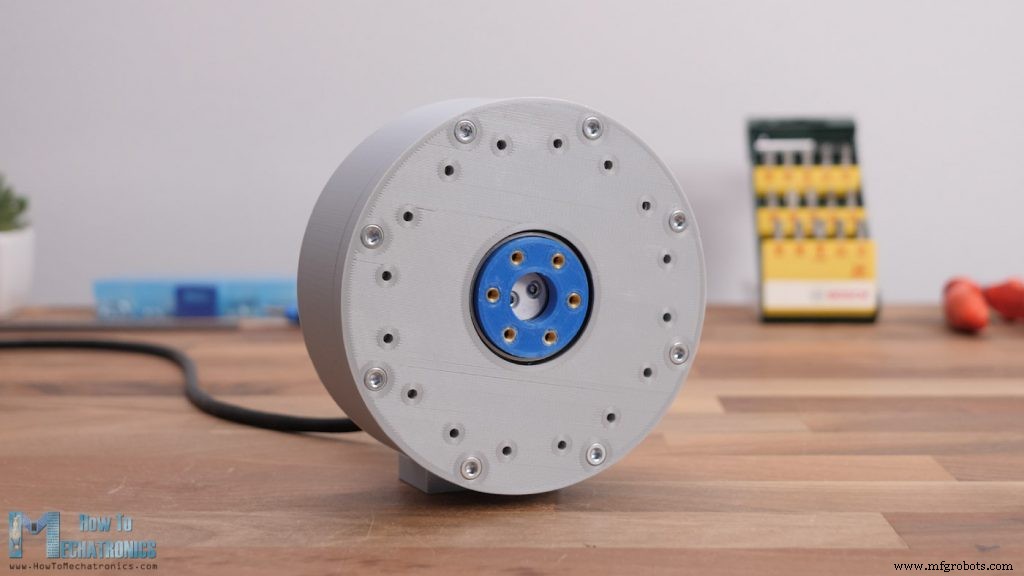
Dan itu saja! Jika adil untuk dikatakan, lihat saja keindahan ini. Saya sangat suka bagaimana tampilan gearbox cycloidal ini, desain yang bersih tanpa ada yang keluar.
Menguji Drive Cycloidal
Namun demikian, sekarang mari kita pasangkan motor padanya dan lihat bagaimana cara kerjanya. Di sisi belakang poros input, saya memasang beberapa insert berulir lagi sehingga kami dapat dengan mudah memasang berbagai skrup poros.
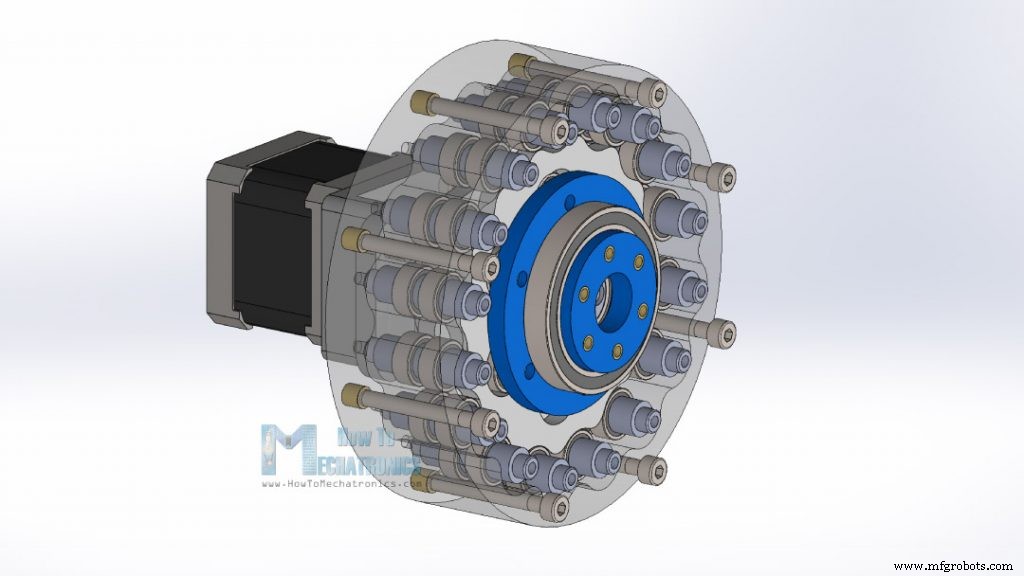
Untuk menguji gearbox, saya akan menggunakan motor stepper NEMA 17 jadi saya memasang coupler poros cetak 3D yang sesuai ke poros input. Saya mengamankan stepper ke braket pemasangan cetak 3D dan memasukkan poros motor ke dalam coupler dan mengamankan braket pemasangan ke rumahan.
Satu hal terakhir adalah memasang beberapa sisipan berulir di bagian depan poros keluaran sehingga kita dapat memasang sesuatu padanya. Berikut tampilan akhir dari cycloidal drive ini, yang dipadukan dengan motor stepper NEMA 17, namun tentu saja kita dapat menggunakan jenis motor lain di sini.
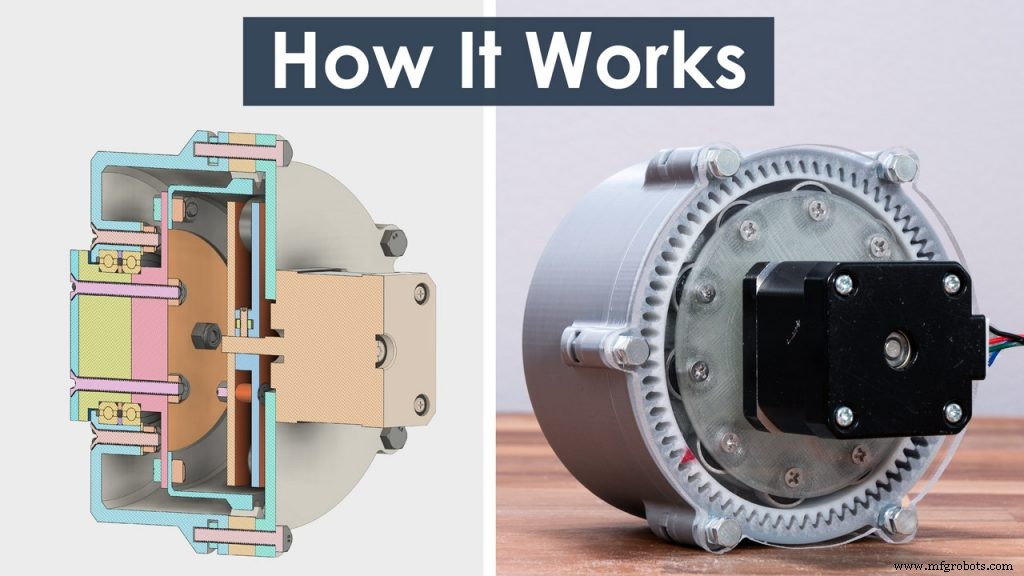
Dan di sana kita memilikinya. Sejujurnya, saya sangat terkejut betapa halusnya output gearbox ini. Dari depan kita dapat melihat poros input dan output berputar pada saat yang sama, dalam arah yang berlawanan dan dengan perbedaan kecepatan 15:1.
Saya juga dapat menjalankan gearbox tanpa penutup depan, sehingga kami dapat melihat semua yang dijelaskan sebelumnya secara langsung.
Gerakannya hanya memesona.
Pada akhirnya, saya melakukan beberapa tes untuk memeriksa kinerja gearbox. Satu hal lagi yang perlu diperhatikan di sini adalah bahwa drive cycloidal ini juga dapat digerakkan dari belakang yang dapat menjadi fitur bagus untuk beberapa aplikasi.
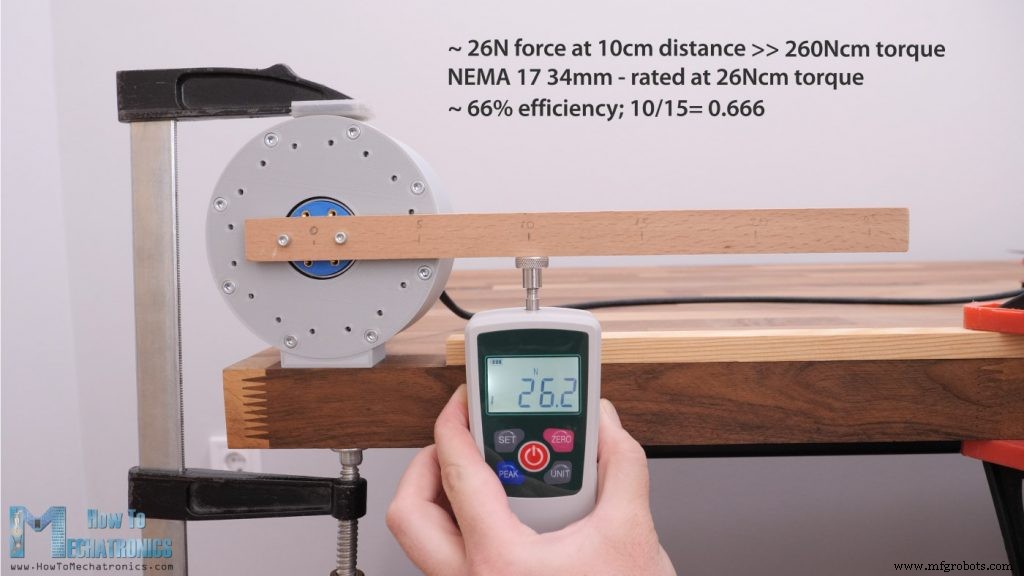
Jadi, di sini saya mengukur gaya yang dapat dihasilkan gearbox ini pada jarak 10cm. Saya mendapatkan pembacaan sekitar 26N, yang diterjemahkan ke torsi, sekitar 260 Ncm, dan stepper NEMA 17 yang panjangnya hanya 34mm ini memiliki nilai 26 Ncm.
Itu berarti kami mendapat peningkatan torsi sekitar 10 kali lipat dengan penggerak cycloidal. Itu efisiensi sekitar 66%, mengingat rasio reduksinya adalah 15:1 dan dalam kondisi ideal kita seharusnya mendapat kenaikan torsi 15 kali lipat. Namun demikian, itu masih merupakan hasil yang bagus mengingat semuanya dicetak 3D dengan printer 3D anggaran dan suku cadangnya tidak begitu akurasi seperti yang akan kita dapatkan dengan beberapa printer pro atau mesin CNC untuk semua kotak logam.
Saya juga melakukan beberapa tes akurasi, yang juga menunjukkan hasil yang baik.
Saya pasti akan menggunakan gearbox jenis ini di video mendatang saat membuat beberapa proyek robot.
Saya harap Anda menikmati video ini dan belajar sesuatu yang baru. Jika Anda memiliki pertanyaan, jangan ragu untuk menanyakannya di bagian komentar di bawah.