Robotika yang Dipandu Visi
Bagian I
Penggerak di balik digitalisasi adalah meningkatnya permintaan akan akurasi, peningkatan kualitas, dan keandalan. Dinamika pasar telah memaksa industri manufaktur untuk menghadirkan produk baru, desain yang dimodifikasi agar sesuai dengan perubahan sentimen konsumen, penyesuaian, dan pengiriman yang lebih cepat. Robot telah menjadi teman industri manufaktur selama beberapa dekade sekarang, dan begitu juga dengan "penglihatan mesin", pada dasarnya.
Robotika dan visi mesin secara independen telah mencapai stabilitas dan kematangan teknologi. Perkembangan terakhir agak saling melengkapi satu sama lain dalam membuat proses lebih efisien. Artikel ini akan menjelaskan beberapa wawasan tentang robotika yang dipandu visi (VGR) di segmen manufaktur. Meskipun VGR sama-sama relevan untuk jenis robot lain seperti robot bergerak, humanoid, Cartesian, dan robot SCARA, kami akan fokus pada aplikasi dan tantangan robot artikulasi .
Sebelum kita masuk jauh ke topik inti, penting untuk memahami beberapa konsep penting dari visi mesin dan robot industri.
Penglihatan mesin dapat didefinisikan sebagai atomisasi penglihatan manusia. Dibutuhkan tidak hanya untuk menangkap gambar (fungsi mata kita), tetapi juga untuk memproses gambar-gambar ini dan menghasilkan hasil (fungsi otak). Sistem penglihatan mesin mengandalkan sensor digital yang dilindungi di dalam kamera industri dengan optik khusus untuk memperoleh gambar, sehingga perangkat keras dan perangkat lunak komputer dapat memproses, menganalisis, dan mengukur berbagai karakteristik untuk pengambilan keputusan.
Aplikasi machine vision pada umumnya dapat dikategorikan ke dalam empat jenis, yaitu:
- Panduan
- Identifikasi
- Mengukur
- Pemeriksaan
Meskipun tugas seperti sistem identifikasi, pengukuran, dan inspeksi memiliki tujuan masing-masing di mana robot menambah nilai pada aplikasi, fokus kami dalam artikel ini adalah pada panduan robot . Sistem visi mesin (MV) dapat menemukan bagian dan memastikan bahwa itu ditempatkan dengan benar di rakitan tertentu. Sistem MV juga dapat membantu mengidentifikasi lokasi komponen dalam ruang 2D atau 3D, dan membantu robot melacak koordinat komponen ini dengan tepat. Sistem MV mengurangi kerumitan memiliki perlengkapan yang diperlukan untuk tujuan ini. Untuk memahami ini, pertama-tama kita perlu melihat bagaimana robot memposisikan dirinya untuk menemukan komponen.
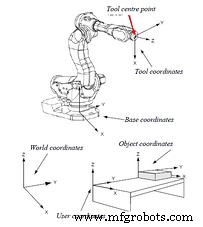
Sistem koordinat robot terdiri dari kerangka acuan yang berbeda. Sistem koordinat utama yang digunakan untuk menggambarkan gerakan robot ditunjukkan di bawah ini dalam Gambar 1.1 . Kontrol gripper atau alat paling penting dan posisinya dicapai melalui gerakan terkoordinasi dari satu atau semua sumbu robot. Karena berbagai jenis gripper dan pahat memiliki dimensi yang berbeda, titik khusus yang disebut titik pusat pahat (TCP) dipilih, terlepas dari jenis pahat. Titik ini merupakan titik asal dari sistem koordinat alat. Poin serupa dapat digunakan untuk menggambarkan gripper atau sistem koordinat pergelangan tangan. Hubungan timbal balik dari alat, pergelangan tangan, dan sistem koordinat lainnya ditunjukkan pada Gambar 1.2 .
Gambar 1.1
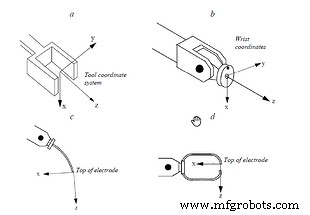
Gambar 1.2
Gambar:Robotika ABB
TCP berhubungan dengan koordinat pergelangan tangan, koordinat dasar, koordinat dunia, dan sistem koordinat objek. Idealnya, koordinat objek diharapkan sama persis dengan set koordinat TCP—artinya titik asal objek diajarkan ke robot melalui pemrograman dan koordinat TCP dicatat. Oleh karena itu, untuk mencapai akurasi berulang, robot dan objek harus datang pada titik yang sama setiap saat.
Pemosisian robot diatur oleh mekanisme servo, dan karenanya cukup akurat. Dalam hal komponen yang terletak tetap, akurasi pemosisiannya bergantung pada sejumlah faktor seperti toleransi pemesinan, toleransi perlengkapan lokasi, dan akurasi pemosisian meja pengindeks dan pengulangan. Oleh karena itu, TCP robot mungkin tidak cocok dengan koordinat objek yang sebenarnya karena offset antara koordinat yang diinginkan dan aktual, dan akan ada kesalahan pemosisian. Jika robot diharapkan untuk mengambil objek atau melakukan operasi apa pun di atasnya saat objek datang secara acak diposisikan di atas konveyor, maka menentukan asalnya menjadi hampir mustahil jika tidak ada sistem seperti visi mesin untuk memandunya.
Jika diterapkan, sistem visi mesin dapat mengidentifikasi koordinat objek secara real-time dan memasukkannya ke robot, yang kemudian mengkompensasi offset ke TCP. Dengan demikian akurasi posisi alat dipastikan. Metode ini banyak digunakan untuk aplikasi seperti pengelasan dan pengeluaran lem, untuk komponen perlengkapan, dan untuk "memilih dan menempatkan" robot dari objek yang didistribusikan secara acak pada konveyor yang bergerak. Contoh di atas berlaku untuk objek yang memiliki ketidakakuratan pemosisian di sepanjang bidang 2D, jadi sistem penglihatan mesin 2D akan digunakan.

"Memilih dan menempatkan" objek robotik berkecepatan tinggi menggunakan panduan penglihatan 2D. Gambar:Cognex Corporation
Untuk aplikasi seperti robotic bin picking, dimana robot diharapkan untuk mengambil objek yang disimpan secara acak dalam bin, analisis spasial 3D menjadi penting. Di sini, tidak hanya koordinat X, Y, dan Z yang penting, tetapi sudut orientasi di sepanjang ketiga sumbu sangat penting bagi robot untuk mengidentifikasi objek yang paling mudah diambil tanpa tabrakan. Jelas bahwa sistem visi mesin 3D diterapkan dalam pengaturan ini.
Sistem penglihatan mesin 3D yang paling populer adalah pengaturan menggunakan penglihatan stereo dengan dua kamera yang menyediakan koordinat dan peta ketinggian. Tugas penting di sini adalah kalibrasi kamera dan algoritme visi mesin yang akan menggabungkan gambar dari kedua kamera dan membuat gambar 3D. Gambar bin dianalisis untuk mendapatkan koordinat TCP dari komponen yang paling mudah untuk dipilih. Beberapa teknik 3D lainnya adalah triangulasi laser dan waktu terbang.
 Pengambilan tempat sampah robot menggunakan panduan penglihatan 3D. Gambar:Robotika Yaskawa
Pengambilan tempat sampah robot menggunakan panduan penglihatan 3D. Gambar:Robotika Yaskawa
Bagian II
Akuisisi Gambar
Gambar berkualitas baik adalah kunci keberhasilan VGR. Tiga komponen utama di sini adalah kamera, optik, dan iluminasi.
Kamera: Ada beberapa hal penting yang harus dipertimbangkan selama pemilihan kamera untuk aplikasi robot. Meskipun kamera komersial di pasar memang memperoleh gambar, lingkungan industri di mana sistem ini diterapkan bisa sangat menantang. Di sini, kamera terpapar lingkungan yang keras dan diharapkan memberikan gambar berkualitas baik yang konsisten setiap saat selama ratusan ribu siklus. Selain itu, guncangan dan getaran yang terjadi karena gerakan robot dan getaran peralatan secara keseluruhan.
Antarmuka komunikasi harus kuat, bertahan dalam kondisi sulit ini sehingga tidak ada gangguan dalam komunikasi selama operasi. Protokol berbasis Ethernet menawarkan keandalan yang baik dan panjang kabel yang lebih panjang yang diperlukan untuk aplikasi ini Kepatuhan Ingress Protection menjadi penting terutama jika sistem digunakan di lingkungan berdebu. PoE adalah sumber daya yang lebih disukai untuk menghindari banyak kabel. Kabel kamera mengalami banyak pembengkokan siklik melalui baki kabel dan harness pada lengan robot, jadi kabel yang sesuai dengan rantai tarik harus digunakan.
 Gambar:Baumer
Gambar:Baumer
 Gambar:Pickit 3D
Gambar:Pickit 3D
Resolusi kamera harus dihitung dengan mempertimbangkan keseluruhan bidang pandang (FOV) dan akurasi posisi yang diinginkan.
Optik: Optik yang sesuai tergantung pada FOV, jarak kerja (WD), dan ukuran sensor kamera harus dipilih. Dua faktor terpenting yang harus dipertimbangkan adalah:
- Distorsi barel harus dijaga seminimal mungkin, dan
- Kekokohan lensa, karena mengalami jumlah guncangan dan getaran yang sama seperti kamera; pengaturan lensa penting seperti iris dan fokus dapat terpengaruh jika tidak ditangani
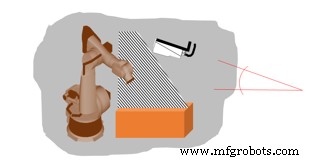
Iluminasi: Penerangan objek memainkan peran penting dalam VGR. Pencahayaan harus sedemikian rupa sehingga menyoroti fitur yang akan diperiksa dalam komponen. Komponen atau kontur yang diprogram harus diidentifikasi secara tepat dalam akurasi sistem yang diinginkan. Oleh karena itu, berdasarkan objek dan konturnya, iluminasi yang sesuai harus dipilih. Sementara jenis aplikasi pengambilan komponen atau pengelasan/penyaluran lem sebagian besar memerlukan lampu batang sederhana yang tersebar, aplikasi pengambilan nampan robot menggunakan kamera stereo sering menggunakan lampu pola terstruktur yang diproyeksikan pada komponen untuk mengumpulkan kontur dan memperoleh profil.

Pencahayaan terstruktur digunakan dalam pengambilan sampah 3D. Gambar:Solomon 3D
Tantangan dalam Robotika dengan Machine Vision
Dalam aplikasi visi mesin robot 2D standar, ada beberapa tantangan yang perlu diatasi:
- Distorsi
- Kalibrasi koordinat
- Kalibrasi Z
- Perataan koordinat
Distorsi: Ada dua jenis utama distorsi yang terjadi dan perlu dikoreksi sebelum sistem visi siap untuk VGR.
- Distorsi Lensa: Lensa (terutama yang sudut lebar) menyebabkan distorsi pada gambar yang diperoleh. Ini dikenal sebagai "distorsi barel."

Distorsi barel. Gambar:Baumer
- Distorsi yang disebabkan oleh pemasangan kamera yang miring
 Gambar:Baumer
Gambar:Baumer
Robot memerlukan izin untuk beroperasi, sehingga kamera sering kali harus dipasang pada posisi miring. Hal ini menyebabkan distorsi pada gambar yang diperoleh.
Kedua jenis distorsi ini memerlukan koreksi dan kalibrasi agar koordinat yang diperoleh akurat.
Kalibrasi Koordinat: Robot bekerja pada sistem koordinat yang didefinisikan dalam satuan seperti milimeter atau inci, sedangkan kamera bekerja pada jumlah piksel. Oleh karena itu, diperlukan kalibrasi kamera agar sistem memahami korelasi antara piksel dan satuan sistem koordinat.
 Gambar:Baumer
Gambar:Baumer
Penting agar pengukuran dilakukan pada jarak kerja yang sama (jarak antara kamera dan objek) setiap saat. Karena robot bekerja dalam 3D, "gripping" juga memerlukan spesifikasi "Z" .
Kalibrasi Z: Kalibrasi Z digunakan untuk menghitung koordinat X dan Y jika sumbu Z bervariasi dalam kedalaman bidang* lensa. Kamera dikalibrasi menggunakan prosedur khusus dengan pelat kalibrasi (dibahas nanti).
Perataan Koordinat: Robot dan sistem penglihatan memiliki sistem koordinatnya sendiri. Penyimpangannya adalah:

Untuk mengatasi masalah ini, dilakukan kalibrasi. Robot mengetahui posisinya sendiri dan juga posisi TCP, sedangkan sistem penglihatan dikalibrasi pada pelat kalibrasi. Robot menghitung offset , dan penyelarasan dilakukan.
Ini adalah langkah yang sangat penting. Robot harus mengikuti jalur yang dimulai dari titik asal yang ditentukan oleh sistem penglihatan. Jika tidak dijalankan dengan benar, kalibrasi yang salah dapat menyebabkan penyimpangan jalur yang serius dan dapat mengakibatkan dalam tabrakan.
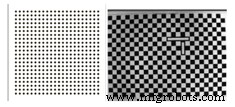
Pelat kalibrasi: Kalibrasi sistem vision dilakukan dengan menggunakan pelat kalibrasi standar yang memiliki tanda dengan dimensi yang presisi. Gambar 2.1 menunjukkan beberapa contoh pelat kalibrasi.
Gambar 2.1
Memperbaiki distorsi lensa dan pemasangan menggunakan pelat kalibrasi: Pelat kalibrasi ditempatkan pada jarak tertentu di bawah kamera dan gambar diperoleh, seperti yang ditunjukkan pada Gambar 2.2 .
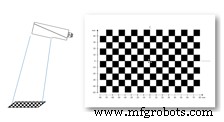
Gambar 2.2:Pemosisian kamera
Gambar:Baumer
Setelah kalibrasi distorsi dilakukan, gambar terlihat sejajar. Ini ditunjukkan di bawah di Gambar 2.3 .

Gambar 2.3
Kalibrasi koordinat menggunakan pelat kalibrasi: Garis kisi atau tanda pada pelat kalibrasi terkait dengan jumlah piksel yang tercakup dalam kamera. Penting untuk memposisikan penunjuk lokasi secara tepat pada pelat kalibrasi.
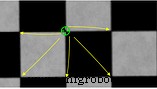
Pointer ditempatkan pada titik/sudut piring. Jarak antara titik-titik ini diketahui, dan kemudian dimasukkan ke dalam bidang parameter kalibrasi perangkat lunak. Sistem penglihatan kemudian menghitung jumlah piksel yang digunakan untuk mengukur jarak tersebut. Pengaturan ini berlaku selama jarak kerja, FOV, dan dudukan kamera dipertahankan. Sistem perlu dikalibrasi ulang jika salah satu dari ketiga hal tersebut berubah.
Tren dan Kemajuan
VGR bukanlah teknologi baru. Ini telah berkembang dan menjadi aplikasi yang cukup matang. Hampir semua produsen robot sekarang menawarkan solusi terintegrasi untuk VGR. Namun, kemajuan terbaru dalam teknologi kamera (seperti kamera berkecepatan tinggi, kamera waktu terbang 3D, dan kamera stereo terintegrasi) dan dalam teknologi perangkat lunak (seperti kecerdasan buatan dan pembelajaran mesin) telah menambahkan bahwa keandalan ekstra dan ketangguhan ke seluruh aplikasi.
Jaringan saraf dalam dikerahkan untuk mengajar dan mengajarkan kembali berbagai kemungkinan pemosisian dan orientasi komponen di semua bidang. Banyak kemungkinan yang dapat dipelajari dapat memperpanjang waktu pelatihan jaringan, tetapi perangkat komputasi terbaru (seperti GPU) membuat tugas lebih sedikit memakan waktu. Platform berbasis cloud untuk pembelajaran mesin juga sedang diterapkan.
Kesimpulan
VGR mendapatkan popularitas yang cepat di semua domain di industri. Aplikasi yang dulunya sebagian besar didorong oleh segmen otomotif sekarang menemukan peminat lain seperti makanan dan obat-obatan untuk pengambilan dan penempatan robot berkecepatan tinggi, pembuatan palet dan penghilangan palet, teknik berat untuk pelacakan jahitan robot pengelasan, pengeluaran lem, dan sebagainya. Ada kebutuhan untuk menetapkan standar untuk memastikan inter-kompatibilitas antara produsen sistem visi dan pembuat robot. Saat dunia melihat ke arah "normal baru" di bidang manufaktur, VGR pasti memiliki peran besar untuk dimainkan.


