Bagaimana Teknologi Mengubah Manufaktur Robot
Pendahuluan:Peringatan ini mungkin membuat Anda merasa TUA
Nama saya Steve Spano, proyek elektronik pertama saya adalah menghubungkan baterai, dua kabel, dan bola lampu senter saat saya berusia 4 tahun. Dari usia sekitar 6 hingga 16 tahun, saya belajar sendiri berbagai bahasa pemrograman (assembly, basic, dan bahkan C) di komputer seperti Texas Instruments TI-994A, Commodore C64, Amiga 2000, dan IBM 386. Saya juga membuat beberapa Heathkit proyek elektronik seperti kit penerima radio "Solid State". Berapa banyak dari Anda yang pernah mendengar tentang Heathkit?

Saya sangat menginginkan Robot Heathkit HERO 1, robot ini sangat canggih dengan deteksi objek Ultrasound, lengan yang dapat digerakkan, dan unit pemrosesan pusat 8-bit. Itu bahkan datang dengan keypad radio jarak jauh sehingga Anda dapat memprogramnya langsung di Majelis Heksadesimal! Bisakah Anda bayangkan? Memprogram langsung dalam heksadesimal dengan keypad dan tanpa debugger sama sekali? Menyeramkan! Hebatnya, robot kecil ini masih dijual seharga $1500 di Ebay. Saya harus membelinya – saya selalu menginginkannya – dan itu sangat lucu!

Selama bertahun-tahun, sebelum adanya Internet, jika Anda dapat membayangkan saat seperti itu, saya bahkan menjalankan layanan “BBS” pada modem 9600 baud yang disebut “Antar-Dimensi” tempat kami bertukar pesan dan perangkat lunak Commodore/Amiga. Impian komputer saya saat itu adalah menghemat $2000 dolar (jumlah uang yang sangat besar pada tahun 1995 untuk seorang anak berusia 16 tahun) untuk membeli hard drive 10 Megabyte untuk Amiga 2000 saya. Jika saya bisa memiliki hard drive itu, Saya akan memiliki BBS berbasis modem terbaik!
Saya dibesarkan di Scranton, Pennsylvania (Amerika Serikat) dan bersekolah di Teknik Elektro (University of Scranton) dan meraih gelar Master di bidang EE dengan konsentrasi dalam sistem kontrol dari State University of New York. Pekerjaan pertama saya EE pekerjaan setelah sekolah adalah merancang perangkat keras untuk printer termal yang digunakan dalam kasir dan aplikasi ritel. Proyek utama pada pekerjaan EE pertama saya, pada tahun 1998, adalah untuk membantu memperbarui produk perusahaan dari CPU Intel 8-bit mereka ke prosesor 32-bit 50 MHz baru dengan bus memori 16-bit. Itu adalah proyek besar yang melibatkan tim perangkat lunak, perangkat keras, dan teknik mesin. Pekerjaan EE kedua saya adalah bekerja untuk sebuah perusahaan yang merancang sistem jaringan area penyimpanan. Ini terjadi pada tahun 2001 dan proyek besar perusahaan ini adalah membantu merancang serangkaian sistem SAN yang mendukung antarmuka Fibre Channel 2 Gbit/s yang baru. Ini sangat cepat, 2Gbit/s pada serat optik pada tahun 2001! Bagaimana teknologi bisa lebih baik dari itu??
Proyek Senior 1997
Saya mengetahui tentang laman Pecinta Elektronik di Instagram dan administrator mencari makalah “Proyek Senior” untuk disorot di halaman mereka. Tidak ada tanggal yang ditentukan, jadi saya pikir saya akan mengirimkan makalah tahun terakhir kuliah saya dari tahun 1997, sebagian besar sebagai pengingat yang menyenangkan tentang bagaimana teknologi telah berubah.
Ketika saya menyelesaikan gelar BSEE saya pada tahun 1997 di University of Scranton, proyek tahun senior kami adalah merancang Robot Otonom yang dapat menavigasi labirin. Saya langsung teringat Heathkit HERO1; sekarang saya dapat mencoba membuat satu di sekolah dan robot yang jauh lebih canggih. Lagi pula, Heathkit HERO1 hanya didasarkan pada CPU Motorola 6808 8-bit dengan ram 4KB (bilah samping:Kartu Jaringan 1G PCI-Express khas saat ini memiliki buffer 64KB hingga 256KB hanya untuk data paket saja).
Arsitektur desain untuk robot saya menggunakan Intel 87x196KC yang jauh lebih canggih. Ini adalah CPU 16-bit yang menyediakan 32KB memori EEPROM internal untuk penyimpanan program tetapi hanya menyediakan memori RAM total 512 byte. Kompiler "C" menghasilkan kode yang sangat tidak dioptimalkan yang membuat pengelolaan tumpukan pada 512 byte menjadi tantangan yang signifikan, dan tidak ada debugger JTAG waktu nyata atau jenis debugger lainnya sama sekali. Namun, CPU memang memiliki serial/UART internal yang dapat Anda gunakan untuk menulis keluaran karakter sederhana untuk menentukan apa yang dilakukan kode tersebut. Panggilan fungsi “C” standar ke printf/sprintf bahkan tidak didukung pada CPU karena memori RAM terlalu kecil.
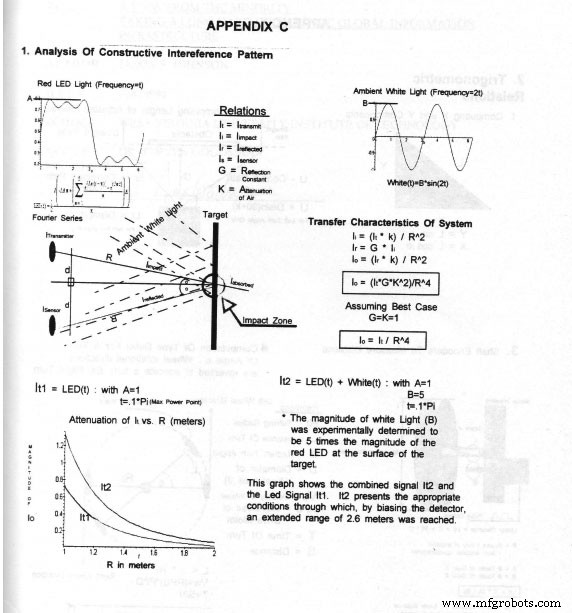
Dalam mengembangkan robot, berbagai sirkuit seperti driver FET kontrol motor digunakan untuk memungkinkan kontrol CPU atas serangkaian motor 12VDC sehingga robot dapat bergerak di dalam ruangan. Sistem "Lidar" mentah dibangun menggunakan laser LED, cermin, dan detektor. Ini memungkinkan tampilan "1 bit" sederhana dari ruangan di depan robot untuk dicitrakan. Saya juga menggunakan istilah "dicitrakan" dengan sangat longgar. Peta sederhana "hidup/mati" untuk rintangan dibuat dalam memori sekitar 32 byte. Kode CPU kemudian akan mencoba untuk menentukan apakah robot itu bergerak menuju celah atau dinding dalam labirin yang coba dinavigasinya. Selama kompetisi, robot berhasil menavigasi labirin. Saya bahkan menulis makalah tentang desain robot dan memenangkan 2nd place di IEEE Student Paper Competition pada tahun 1997 di George Washington University. Robot itu bekerja dan mereka membiarkan saya lulus dengan gelar di bidang Teknik Elektro.
Proyek Tahun Senior 2018
Saya baru-baru ini berada di University of Scranton sebagai Penasihat Industri untuk membantu memberikan ide untuk kursus berdasarkan apa yang mungkin dibutuhkan Industri dan keterampilan/teknologi apa yang relevan untuk tantangan teknik saat ini. Saya bertanya kepada salah satu Profesor saya tentang proyek robot dan apa yang siswa lakukan sekarang.
University of Scranton masih mengadakan kompetisi robot untuk mahasiswa Teknik mereka setiap tahun, tetapi sekarang menjadi kompetisi regional dan nasional. Robot yang dirancang siswa 100 kali lebih kompleks. Robot saat ini menggunakan CPU Arm9/Arm11 seperti Raspberry PI. Para siswa sedang menulis kode “C” yang berjalan di Linux untuk dihubungkan langsung ke kamera USB-HD, memungkinkan imajinasi aktual pada robot. Menggabungkan Linux, Raspberry PI dan kekayaan proyek Open Source yang tersedia melalui GIT dan Google, para siswa kemudian memiliki akses ke deteksi gambar dan algoritma pengenalan. Selama pengembangan proyek robot saat ini, siswa dapat mengunduh algoritme sumber terbuka, men-debugnya dengan monitor ethernet jarak jauh yang memungkinkan mereka melihat setiap variabel dan satu langkah kode mereka untuk debugging. Siswa kemudian menghabiskan lebih banyak waktu untuk mengembangkan algoritme navigasi yang sangat cerdas untuk mencoba memberikan keunggulan yang lebih baik pada robot mereka selama kompetisi.
Setelah mendengar ini, saya langsung menjawab “Betapa Tidak Adil!”. Di zaman saya, kami harus menyimpan seluruh gambar dalam 32 byte dan memberikan kode pengelola tumpukan untuk memungkinkan kode kami berjalan bahkan hanya dengan 512 byte RAM yang kami sediakan. Tentu saja, Raspberry PI bahkan bukan "puncak" dari teknologi saat ini – tetapi ini adalah tahun cahaya melampaui apa pun yang tersedia pada tahun 1997. Tidak hanya perangkat kerasnya yang lebih canggih, tetapi lingkungan debugging dan pengembangan memungkinkan siswa untuk fokus pada desain daripada berjuang dengan masalah memori. Namun, beberapa hal tetap sama. robot masih harus bergerak. Meskipun siswa memiliki akses ke beberapa CPU kelas atas, mereka masih harus mendapatkan port 3,3v pada proses untuk mengaktifkan/menonaktifkan motor 12VDC. Hal ini membawa siswa kembali ke desain sirkuit untuk transistor dan FET, mereka mempelajari cara komponen dasar ini berfungsi dan memungkinkan robot mereka bergerak.
Saya tersenyum dan mengatakan bahwa dasar-dasarnya masih berlaku, dan para siswa mengenalinya. Elektronik canggih masih mengandalkan operasi dasar transistor tunggal; mungkin satu di bagian luar CPU menyalakan motor, atau 5 Triliun di bagian dalam CPU untuk memproses gambar dan kode navigasi.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Jadi Apa Selanjutnya?
"Pekerjaan" ke-3 saya – yang masih saya miliki sampai sekarang – adalah menjalankan bisnis Konsultan Elektronik dan Perangkat Lunak saya sendiri. Saya memulai bisnis konsultasi pada tahun 2001 dan itu pasti penuh dengan pekerjaan dan kegiatan yang tidak terduga. Saya telah mempekerjakan lebih dari selusin orang secara langsung dan kami telah mengerjakan proyek perangkat keras dan perangkat lunak mulai dari desain catu daya, driver printer, pemrosesan gambar, peralatan jaringan, hard disk drive, dan kriptografi. Bagi saya pribadi, saya berencana untuk lebih fokus pada favorit saya. item teknologi – Xilinx FPGA.
Perangkat FPGA modern seperti seri Kintex/Atrix menyatukan bagian terbaik dari pengembangan perangkat keras dan perangkat lunak; perangkat keras yang dapat dikonfigurasi ulang, perangkat lunak yang dapat dikonfigurasi ulang, dan debugging simultan. Salah satu proyek khusus yang sedang saya kerjakan adalah untuk spektrometer massa. Dalam desain khusus ini, ada banyak kendala untuk kecepatan dan pengumpulan data. Salah satu bagian dari perbaikannya adalah "tambahkan saja inti prosesor lain". Hampir seperti sulap, perangkat inti tunggal karena perangkat inti ganda memungkinkan pembagian tugas rumah tangga dan fungsi penting waktu. Kemampuan untuk mengonfigurasi ulang perangkat fisik, seperti FPGA, dengan inti prosesor tambahan akan sulit dibayangkan pada tahun 1997. Perangkat FPGA modern memungkinkan Anda melakukan ini setiap saat sekarang.
Saya berencana untuk kembali ke Universitas Scranton akhir tahun ini untuk berbicara dengan beberapa mahasiswa tentang proyek FPGA saat ini. Saya akan lebih fokus pada mereka di pekerjaan saya; mungkin di masa depan, saya akan dapat membimbing para insinyur baru saat mereka memulai pekerjaan pertama dalam karir baru mereka. P.S. Sebuah "skor" adalah 20 tahun. Saya harus melihat itu kembali. Saya seorang Insinyur, bukan Jurusan Bahasa Inggris.
Lampiran A – Kutipan dari My Robot Paper atau
“Bagaimana Waktu Berubah”
Artikel ini telah Ditulis oleh Mr. Spano, dia adalah bagian dari tim kami dengan hormat Klik Di Sini jika Anda ingin Membaca Biografinya.


