Tentang proyek ini




Mobil RC sangat menyenangkan untuk diretas dan mereka menyediakan sasis yang bagus dengan harga murah, untuk membuat robot tetapi memilih satu untuk dibuat sangat merepotkan dengan jutaan jenis. Adik laki-laki saya berulang tahun baru-baru ini dan saya ingin memberinya sesuatu yang sangat keren, saya akhirnya memberinya mobil rc ini. Peretasan mobil RC juga mudah dan sulit, karena cara pembuatan mobil rc yang berbeda tidak membuat cara yang mudah dan pasti untuk meretas mobil, tetapi peretasan ini bersifat universal. Saya juga akan mencoba untuk menutupi dasar tentang semua bagian dan teori di balik setiap modul. Kami telah menggunakan modul tetapi Anda didorong untuk membuat sirkuit kami, kecuali pro mini.
Saya sangat tidak nyaman dengan promini karena terlalu kecil tapi menyenangkan.
Lihat videonya dan pastikan berlangganan untuk video yang akan datang
Langkah 1:Mendapatkan sasis yang tepat 


Daftar Bagian
Mendapatkan sasis yang tepat
Untuk memilih sasis adalah pertanyaan tentang mekanisme penggerak, ada banyak mekanisme penggerak.
Mari kita bicara tentang dua mekanisme yang paling populer.
Drive Diferensial Apa itu Drive Diferensial?
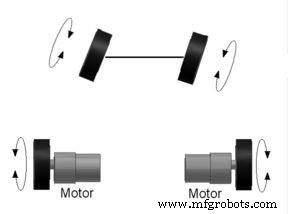
Istilah diferensial berarti perbedaan antara dua entitas, dalam konteks robotika itu hanyalah perbedaan kecepatan antara dua motor. Berdasarkan perbedaan kecepatan ini, robot dapat digerakkan ke segala arah pada tata letak 2D.
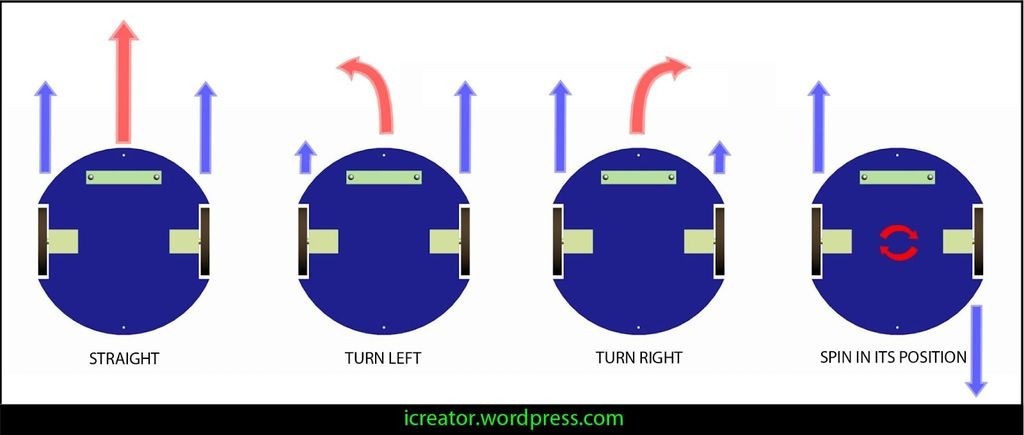
Ketika dua motor dihubungkan ke roda dalam satu garis, berlawanan satu sama lain (Sama seperti sepasang roda yang terhubung ke poros tunggal) kecepatan putaran masing-masing motor menentukan arah gerakan. Ketika kedua roda berputar pada kecepatan yang sama perbedaan antara motor adalah Nol. Hal ini membuat robot bergerak maju dalam garis lurus. Robot dapat bergerak ke arah sebaliknya jika arah putaran kedua motor dibalik. Ini lagi akan berada dalam garis lurus jika perbedaan kecepatan adalah nol. Sekarang mengubah kecepatan salah satu motor akan menghasilkan gerakan ke arah yang menjauhi garis lurus. Misalnya, mengurangi kecepatan motor kanan akan menghasilkan perbedaan kecepatan dan karenanya berubah arah. Gaya resultan sedemikian rupa sehingga robot berbelok ke kanan. Perubahan arah ini dapat dikontrol ke sudut yang diinginkan dengan mengurangi kecepatan motor lebih jauh. Semakin lambat motor kanan, semakin tajam belok ke kanan. Ini persis sama untuk belok kiri.
Kesimpulannya, motor kanan lebih lambat, belok kanan lebih tajam. Motor kiri lebih lambat Belok kiri lebih tajam. Di bawah ini adalah beberapa skenario yang menjelaskan cara kerja mekanisme penggerak diferensial. M1 dan M2 adalah motor yang menggerakkan roda di kiri dan kanan masing-masing.
Kemudi Jenis Drive
Apa yang dimaksud dengan drive tipe Kemudi?
Penggerak jenis mobil adalah yang paling umum di dunia nyata tetapi tidak di dunia robot. Hal ini ditandai dengan sepasang roda penggerak dan sepasang roda kemudi yang terpisah Translasi dan rotasi tidak tergantung satu sama lain. Tetapi translasi dan rotasi saling terkait sehingga sistem ini menghadapi masalah perencanaan jalur yang parah. Roda empat lebih hemat dibandingkan roda tiga atau dua. Dua roda pertama dari empat roda dapat digunakan untuk menyetir dan dua roda berikutnya untuk menggerakkan robot. Menyeimbangkan robot beroda empat tidak pernah menjadi masalah. Kebanyakan mobil sehari-hari yang kita gunakan beroda empat dan contohnya sudah cukup membuktikan keberadaan dan kemampuannya.
Kekurangan Drive Jenis Mobil :Mekanisme putaran harus dikontrol secara akurat. Sedikit ketidakakuratan dapat menyebabkan kesalahan odometri yang besar Sistem ini Non – Holonomik sehingga perencanaan jalur sangat sulit serta tidak akurat Tidak ada penggerak arah langsung
Jadi lebih baik menggunakan drive diferensial karena kesederhanaan dan kemudahan penggunaannya.
Langkah 2:Mengontrol motor 
Untuk mengendalikan motor kita membutuhkan sesuatu yang disebut driver motor.
Apa itu Pengemudi Motor?
Pengemudi motor adalah penguat arus kecil; fungsi dari driver motor adalah mengambil sinyal kontrol arus rendah kemudian mengubahnya menjadi sinyal arus lebih tinggi yang dapat menggerakkan motor.
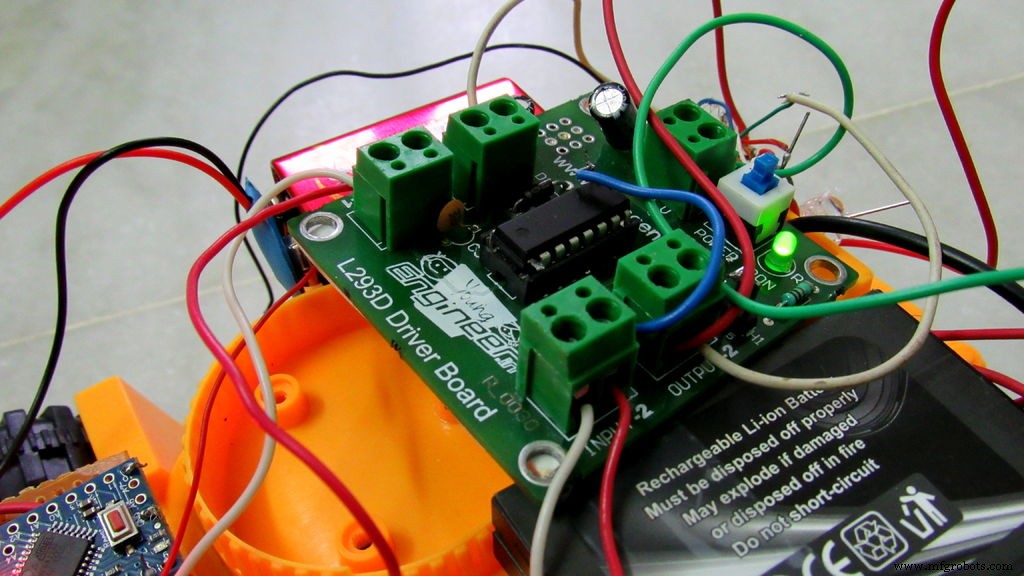
Ada banyak driver motor yang saya gunakan modul driver motor l293d.
L293D adalah rangkaian terintegrasi driver Motor yang digunakan untuk menggerakkan motor DC berputar ke kedua arah. Ini adalah IC 16-pin yang dapat mengontrol satu set dua motor DC secara bersamaan. L293D menggunakan 5V untuk dayanya sendiri dan sumber daya eksternal diperlukan untuk menggerakkan motor, yang dapat mencapai 36V dan menarik hingga 600mA. L293D bekerja pada konsep khas H-jembatan, sirkuit yang memungkinkan tegangan tinggi diterbangkan ke kedua arah. Dalam satu IC L293D terdapat dua rangkaian H-bridge yang dapat memutar dua motor DC secara independen.
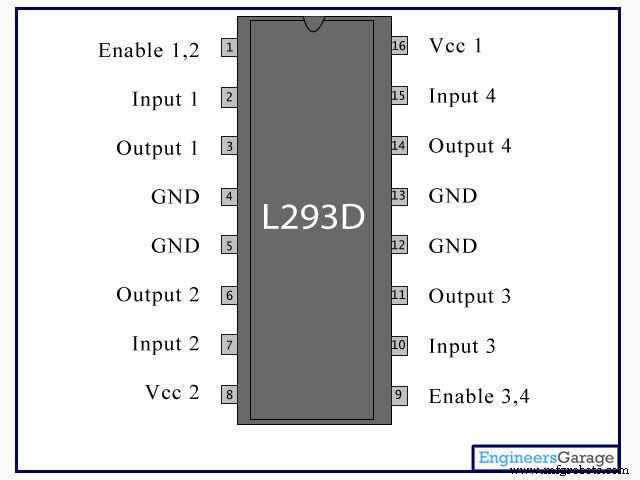
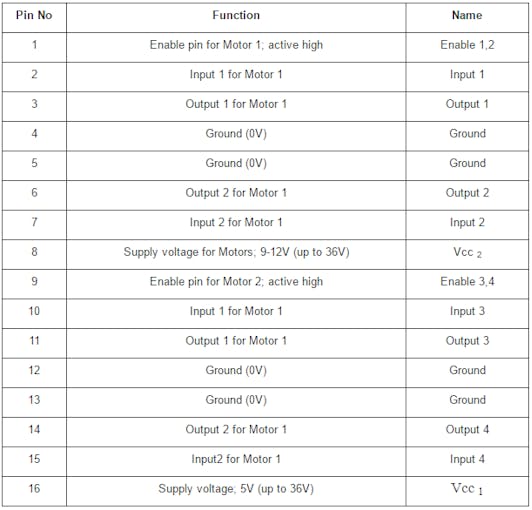
Deskripsi pin L293d
1Aktifkan pin untuk Motor 1; active high Enable 1,2 2 Input 1 untuk Motor 1 Input 1 3 Output 1 untuk Motor 1 Output 1 4 Ground (0V) Ground 5 Ground (0V) Ground 6 Output 2 untuk Motor 1 Output 2 7 Input 2 untuk Motor 1 Input 2 8 Tegangan suplai untuk Motor; 9-12V (hingga 36V) Vcc 2 9 Aktifkan pin untuk Motor 2; active high Enable 3,4 10 Input 1 untuk Motor 1 Input 3 11 Output 1 untuk Motor 1 Output 3 12 Ground (0V) Ground 13 Ground (0V) Ground 14 Output 2 untuk Motor 1 Output 4 15 Input2 untuk Motor 1 Input 4 16 Tegangan suplai; 5V (hingga 36V) Vcc 1
Langkah 3:Tentang Aplikasi 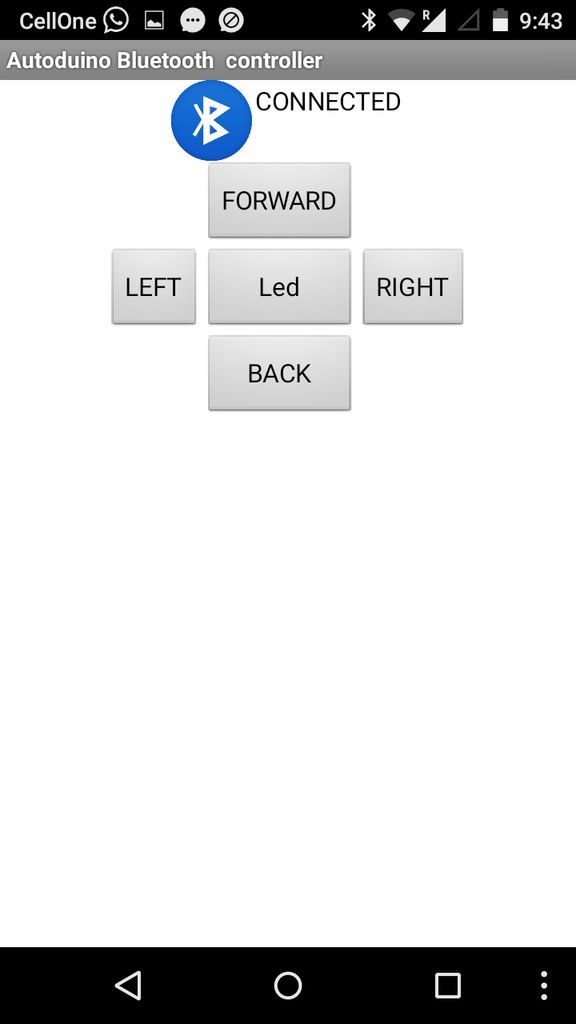


Ada banyak aplikasi untuk mengontrol yang saya buat dengan satu. Logikanya sangat sederhana, semua tombol mengirim karakter ketika ditekan melalui Bluetooth dan arduino memprosesnya.
Fungsi Karakter
X Status nol F Gerak Maju B Gerak Mundur L Belok Kiri R Belok Kanan
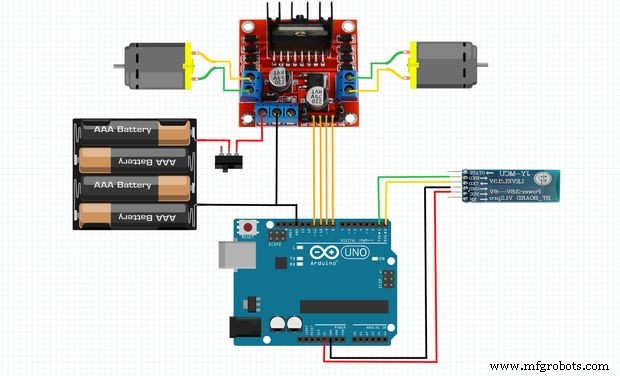
Langkah 4:Sambungkan semua bagian 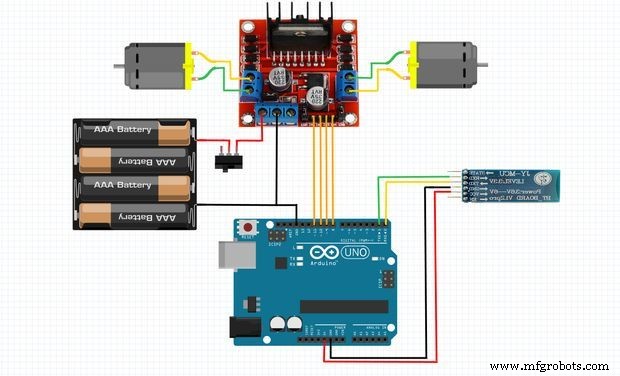

Koneksinya sederhana
berikut koneksinya sebagai berikut
Modul Bluetooth
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
Pengemudi Motor
Driver Motor Arduino pin 2 8 pin 7 7 pin 10 6 pin 4 9 pin 3 dan 6 Motor 1 pin 11 dan pin 14 Motor 2 pin 1 5v pin 9 5v
Langkah 5:Pengodean 

pengaturan batal() {Serial.begin(9600);pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); pinMode(5, OUTPUT); pinMode(4, OUTPUT); digitalWrite(4,RENDAH); digitalWrite(5,LOW);}// fungsi loop berjalan berulang-ulang selamanyavoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){ analogWrite( mempercepat,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW); digitalWrite(frled1,RENDAH); digitalWrite(bcled1,LOW );}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}}
Saya harap Anda menikmati membuat proyek seperti yang telah saya lakukan. Saya akan segera memposting beberapa proyek keren lainnya, jadi ikuti saya untuk mendapatkan semua pembaruan. Juga suka halaman saya https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Kode
Cuplikan kode #1Teks biasa
pengaturan batal() { Serial.begin(9600); pinMode(8, OUTPUT); pinMode(7, OUTPUT); pinMode(9, OUTPUT); pinMode(6, OUTPUT); pinMode(5, OUTPUT); pinMode(4, OUTPUT); digitalWrite(4,RENDAH); digitalWrite(5,LOW);}// fungsi loop berjalan berulang-ulang selamanyavoid loop() { var=Serial.read(); if(var=='F') { digitalWrite(6,LOW);digitalWrite(7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH); } if(var=='H') { digitalWrite(frled1,HIGH); } if(var=='B') { analogWrite(speeden,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH); } if(var=='X') {digitalWrite(9,RENDAH); digitalWrite(8,RENDAH); digitalWrite(7,RENDAH); digitalWrite(6,RENDAH); digitalWrite(frled1,RENDAH); digitalWrite(bcled1,LOW ); } if(var=='L') {digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); } if(var=='R') {digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);; }} Skema