Tentang proyek ini
Semua tentang proyek
Saya seorang mahasiswa Desain Seni Media yang belajar di Universitas Multimedia, Cyberjaya Malaysia. Ini adalah Tahun Gamma saya mempelajari Seni Media, Desain Interaksi adalah mata pelajaran yang akan mengajarkan siswa tentang cara menggunakan komponen Arduino dan cara kerjanya. Jadi dalam tugas akhir saya, saya telah memilih robot Penghindar Hambatan sebagai proyek saya sendiri dan mempelajari cara kerja setiap komponen.
Langkah 1:
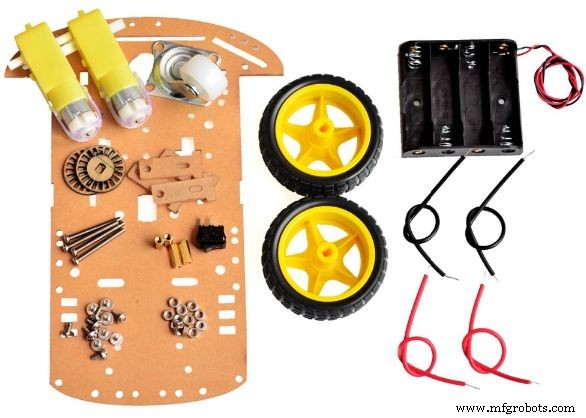
Siapkan dan bangun sasis Robot Anda. Di dalam paket ada beberapa komponen, sasis, dua motor, dua roda, roda depan, dudukan baterai, beberapa sekrup, sakelar, dan kabel jumper. Foto di bawah ini:
Langkah 2:
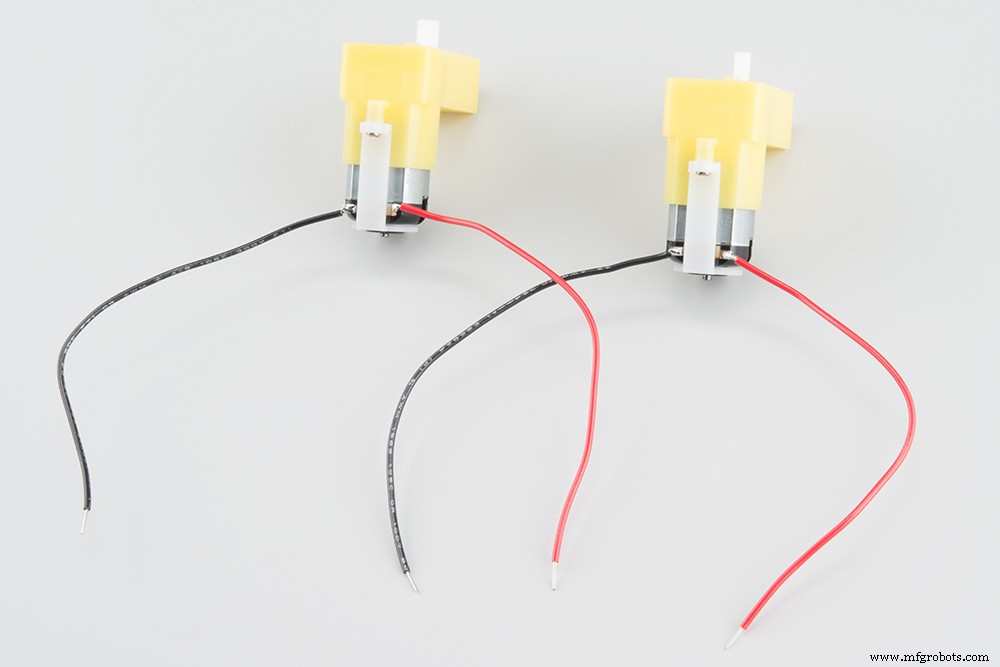
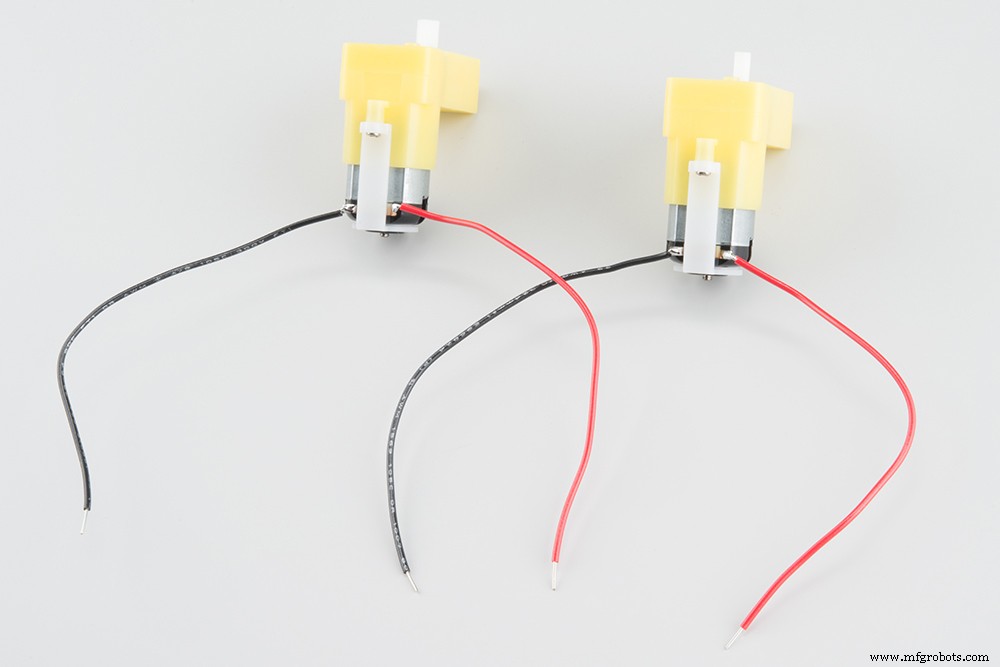
Sebelum menyolder kabel jumper pada kedua motor Anda, saya sarankan untuk menguji setiap komponen untuk memastikan semuanya berfungsi dengan baik, contoh:Kedua motor DC, papan Arduino, Motor Shield, motor Servo dan sensor Ultrasonik. Kemudian kita akan mulai menyolder kabel merah dan hitam pada kedua motor, contoh gambar dibawah ini :
Langkah 3:
Datang ke sasis baterai kami dan beralih bagian. Kita hanya perlu memotong setengah dari kabel hitam dari sasis baterai dan menyolder 1 sisi kabel di 1 lubang, kabel hitam lainnya akan disolder di lubang lain. Saklar kami sudah siap!
Langkah 4:
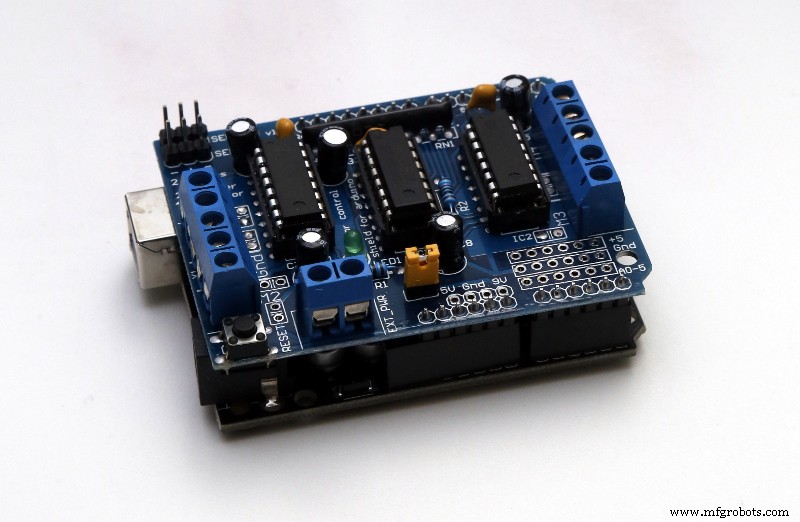
Kita perlu menumpuk papan Arduino dan papan Motor Shield, Motor Shield akan menumpuk di papan Arduino. Contoh di bawah ini:
Langkah 5:
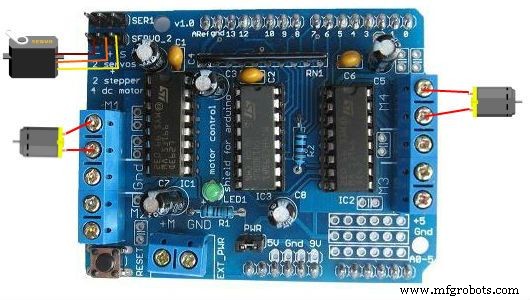
Kami akan beralih ke papan Motor Shield. Perisai ini memberikan daya ke motor dan motor servo, motor membutuhkan banyak arus, dan perisai ini dapat memberikan arus hingga 600mA ke setiap motor. Kita perlu menyolder/memperbaiki kabel motor DC pada papan pelindung Motor. Jika kabel motor DC Anda cukup panjang untuk mencapai Pelindung Motor akan bagus, jika tidak Anda mungkin perlu menggunakan kabel jumper eksternal (Tidak peduli kabel jumper Pria / Wanita), potong kepala kabel jumper dan pastikan di dalam garis tembaga muncul. (Anda perlu memotong karet kawat jumper untuk membuat kawat tembaga muncul). Dan Anda perlu menyolder kabel eksternal ke kabel motor DC. Contoh:
Kemudian sambungkan kabel motor kiri ke konektor M1 pelindung motor. Kawat motor kanan akan terhubung ke konektor M3 dari papan pelindung Motor. Contoh:

Langkah 6:
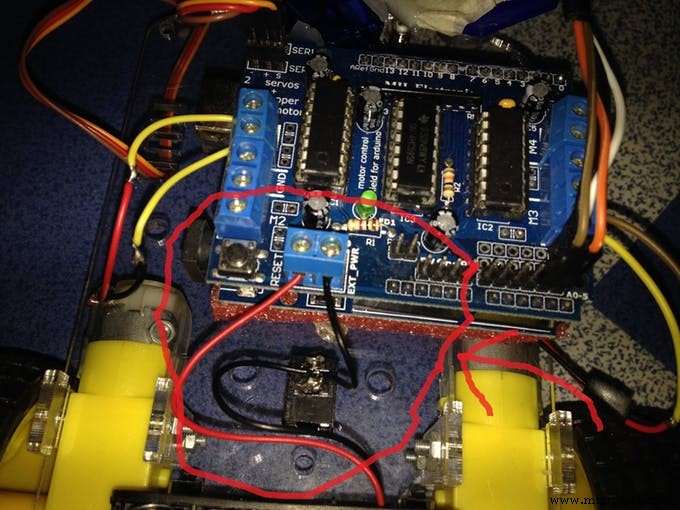
Kemudian kita perlu menghubungkan kabel sakelar baterai baik kabel merah dan hitam ke papan pelindung Motor.
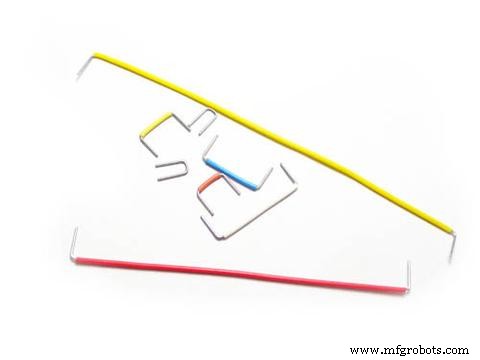
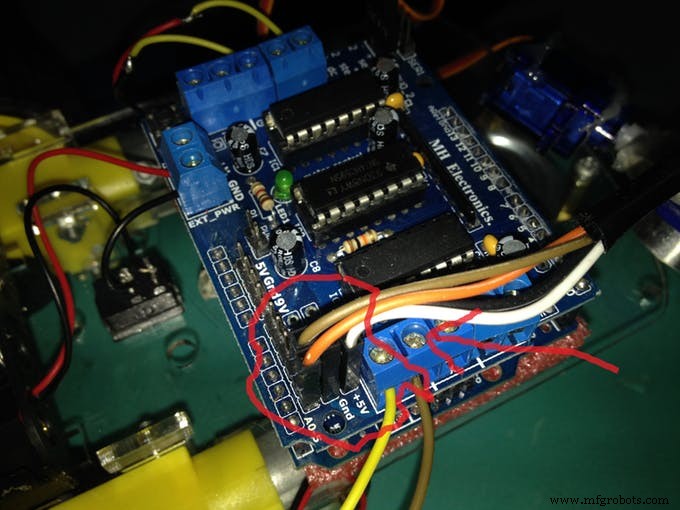
Setelah itu, kita perlu menyiapkan kabel jumper Pria dan Wanita untuk menyoldernya ke 5V, GND, Pin Analog 4 dan Pin Analog 5. Sebelum itu, kita perlu menemukan warna kabel jumper wanita dan pria yang sama dan memotongnya menjadi dua. . Kenapa harus sama warnanya? Pertama mudah bagi kita untuk mengenali kawat mana untuk bagian mana. Kedua, kabel jumper Male putih akan disolder dengan kabel jumper Female putih yang terhubung ke 5V. Kawat jumper jantan warna hitam akan disolder dengan kawat jumper betina dan kawat jumper jantan akan disolder ke GND. Warna jingga Kawat jumper jantan akan disolder dengan kawat jumper betina jingga, Kawat jumper jantan jingga akan disolder pada Pin Analog 5. Terakhir, kawat jumper jantan coklat akan disolder dengan kawat jumper coklat betina, kemudian kawat jumper jantan warna coklat akan disolder ke Pin Analog 4. Contoh:
Langkah 7:
Anda dapat menggunakan selotip dua sisi atau lem panas untuk memasang kedua pelindung pada sasis robot.
Langkah 8:Masuk ke bagian Sensor Ultrasonik
Dari kabel jumper Female &Male yang baru saja kita solder, kabel jumper Putih (5V) (Kabel jumper situs Female) akan terhubung ke pin VCC Sensor Ultrasonik. Kabel Jumper Hitam (GND) (Kabel jumper situs wanita) akan terhubung ke pin GND. Kabel jumper coklat (Analog Pin 4) (Kabel jumper situs wanita) akan terhubung ke pin Echo. Kabel jumper warna oranye (Pin Analog 5) (Kabel jumper situs wanita) akan terhubung ke pin TRIG.

Langkah 9:
Terakhir, Untuk motor Servo akan terhubung ke slot servo_2. Catatan* (Ada beberapa jenis motor servo di luar sana. Anda mungkin perlu menemukannya secara online untuk cara menyambungkannya ke slot servo_2). Di bawah ini untuk slot servo versi saya sendiri.
Langkah Terakhir:Kode
Untuk robot penghindar Hambatan ini, kita membutuhkan 3 library, yaitu library Motor Shield untuk driver Motor Shield, library Ping Baru untuk Sensor Ultrasonic. Ketiga adalah Arduino IDE. Di bawah ini adalah tautan yang dapat diunduh untuk perpustakaan:
Perpustakaan Pelindung Motor
Saya menghargai kalian untuk melihat proyek saya. Saya harap instruksinya cukup jelas untuk Anda ikuti dan buat Robot Penghindar Rintangan untuk Anda sendiri. Terima kasih!
Video untuk pengujian:
Kode
Arduino IDE C#
Salin dan Tempel kode di Arduino IDE lalu unggah ke papan Arduino Anda#include #include #include #define TRIG_PIN A4 #define ECHO_PIN A5#define MAX_DISTANCE_POSSIBLE 1000 #define MAX_SPEED 150 // #define MOTORS_CALIBRATION_OFFSET 3#define COLL_DIST 20 #define TURN_DIST COLL_DIST+10 NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE_POSSIBLE);AF_DCMotor kiriMotor(3, MOTOR kiri); AF_DCMotor kananMotor(1, MOTOR12_8KHZ); Servo neckControllerServoMotor;int pos =0; int maxDist =0;int maxAngle =0;int maxRight =0;int maxLeft =0;int maxFront =0;int course =0;int curDist =0;String motorSet ="";int speedSet =0;void setup() { neckControllerServoMotor.attach(10); neckControllerServoMotor.write(90); penundaan(2000); cekPath(); motorSet ="MAJU"; neckControllerServoMotor.write(90); moveForward();}void loop() { checkForward(); checkPath();}void checkPath() { int curLeft =0; int curFront =0; int saatKanan =0; int curDist =0; neckControllerServoMotor.write(144); penundaan(120); for(pos =144; pos>=36; pos-=18) { neckControllerServoMotor.write(pos); penundaan (90); periksaMaju(); curDist =readPing(); if (curDist curDist) {maxAngle =pos;} if (pos> 90 &&curDist> curLeft) { curLeft =curDist;} if (pos ==90 &&curDist> curFront) {curFront =curDist;} if (pos <90 &&curDist> curRight) {curRight =curDist;} } maxLeft =curLeft; maxRight =kananKanan; maxFront =curFront;}void setCourse() { if (maxAngle <90) {turnRight();} if (maxAngle> 90) {turnLeft();} maxLeft =0; maksKanan =0; maxFront =0;}kosongkan checkCourse() { moveBackward(); penundaan (500); pindahBerhenti(); setCourse();}void changePath() { if (pos <90) {lookLeft();} if (pos> 90) {lookRight();}}int readPing() { delay(70); unsigned int uS =sonar.ping(); int cm =uS/US_ROUNDTRIP_CM; return cm;}void checkForward() { if (motorSet=="FORWARD") {leftMotor.run(FORWARD); rightMotor.run(FOWARD); } }void checkBackward() { if (motorSet=="BACKWARD") {leftMotor.run(BACKWARD); rightMotor.run(Mundur); } }void moveStop() {leftMotor.run(RELEASE); rightMotor.run(RELEASE);}void moveForward() { motorSet ="FOWARD"; leftMotor.run(FOWARD); rightMotor.run(FOWARD); for (speedSet =0; speedSet Skema