Tentang proyek ini
Kisah Kami :
Proyek ini tentang membuat robot bergerak di jalur yang telah ditentukan dengan presisi, tanpa menggunakan GPS atau WiFi atau Bluetooth untuk penentuan posisi, bahkan peta atau rencana tata letak bangunan. Dan gambarkan jalur sebenarnya (ke skala), secara real-time. Bluetooth dapat digunakan sebagai pengganti kabel, untuk mengirimkan informasi lokasi secara real-time.

Cerita Latar Belakang:
Kami sedang mencari solusi yang kuat untuk navigasi dalam ruangan robot berbasis Arduino kami. Saat memilih solusi penginderaan gerakan yang tepat untuk aplikasi ini, kami juga mempertimbangkan Oblu (IMU opensource). Biaya rendah dan sifat opensource membuatnya menjadi kandidat yang memungkinkan. Bagian yang sulit di sini adalah bahwa program opensource oblu cocok untuk Pedestrian Dead Reckoning (PDR ) atau Navigasi Pedestrian yang dipasang di dalam ruangan, dengan kata sederhana. Performa PDR Oblu di dalam ruangan sebagai IMU yang dipasang di kaki cukup mengesankan. Poin plus yang besar adalah aplikasi Android gratis (Xoblu) untuk pelacakan posisi waktu nyata. Namun, kami tidak yakin bagaimana memanfaatkan algoritma navigasi pejalan kaki yang ada yang didasarkan pada model berjalan manusia.
Perhitungan internal Oblu didasarkan pada cara berjalan manusia. Oblu memberikan perpindahan antara dua langkah berturut-turut dan perubahan heading. Ketika kaki menyentuh tanah, kecepatan sol adalah nol, yaitu sol berhenti. Dengan cara ini Oblu mendeteksi 'langkah' dan memperbaiki beberapa kesalahan internal. Dan koreksi kesalahan yang sering ini, menghasilkan kinerja pelacakan yang hebat. Jadi di sinilah letak tangkapannya. Bagaimana jika robot kita juga berjalan dengan cara yang sama - bergerak, berhenti, bergerak, berhenti..
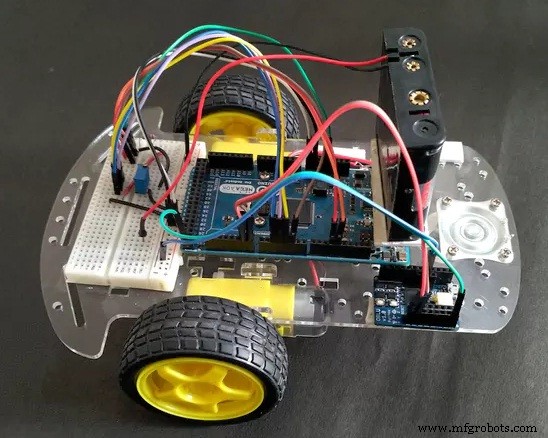
Kami memilih Oblu dan dalam waktu singkat kami dapat merakit robot dan sistem pelacakan kami. Kisah selanjutnya ada di video berikut...
Bagaimana cara kerjanya:
Robot bergerak di jalur yang telah diprogram sebelumnya dan mengirimkan (melalui bluetooth) informasi pergerakannya yang sebenarnya ke telepon untuk pelacakan waktu nyata.
Arduino sudah diprogram dengan jalur dan oblu digunakan untuk merasakan gerakan robot. oblu mengirimkan informasi gerakan ke Arduino secara berkala. Berdasarkan hal itu, Arduino mengontrol gerakan roda agar robot mengikuti jalur yang telah ditentukan.
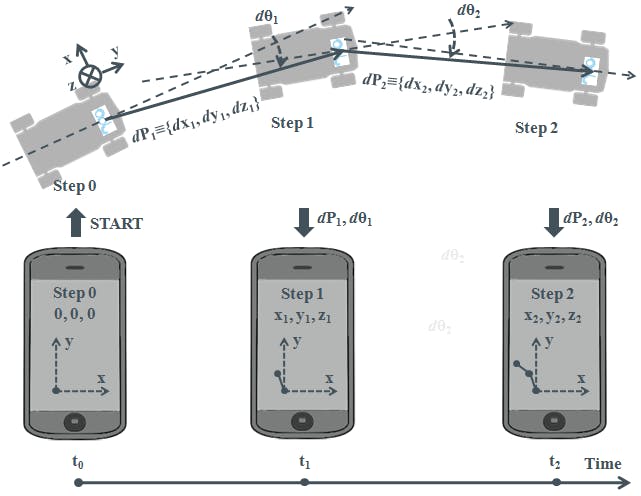
Jalur robot diprogram sebagai satu set segmen garis lurus. Setiap segmen garis ditentukan oleh panjang dan orientasinya terhadap yang sebelumnya. Gerakan robot dijaga kerahasiaannya, yaitu bergerak dalam garis lurus, tetapi dalam segmen yang lebih kecil (sebut saja 'langkah' untuk kesederhanaan). Pada akhir setiap langkah, oblu mengirimkan panjang langkah dan tingkat deviasi (perubahan orientasi) dari garis lurus, ke Arduino. Arduino mengoreksi keselarasan robot di setiap langkah menerima informasi tersebut, jika menemukan penyimpangan dari garis lurus yang telah ditentukan.
Sesuai program, robot harus selalu bergerak dalam garis lurus. Namun, mungkin menyimpang dari garis lurus dan mungkin berjalan pada sudut tertentu atau jalur miring karena non-idealitas seperti permukaan yang tidak rata, ketidakseimbangan massa dalam perakitan robot, ketidakseimbangan arsitektur atau listrik pada motor dc atau orientasi acak dari roda depan yang berjalan bebas. Ambil satu langkah.. perbaiki arahmu... bergerak maju. Robot juga bergerak mundur jika berjalan lebih dari panjang terprogram dari segmen garis tertentu..
Panjang langkah berikutnya tergantung pada jarak yang tersisa yang harus ditempuh dari segmen garis lurus tertentu. Robot mengambil langkah besar ketika jarak yang akan ditempuh lebih besar dan mengambil langkah lebih kecil di dekat tujuan (yaitu ujung setiap segmen garis lurus).
IMU Oblu mengirimkan data ke Arduino dan telepon (melalui bluetooth) secara bersamaan. Xoblu (aplikasi Android) melakukan beberapa perhitungan sederhana untuk membangun jalur berdasarkan informasi pergerakan yang diterima dari robot, yang digunakan untuk pelacakan waktu nyata di ponsel. (Konstruksi jalur menggunakan Xoblu diilustrasikan di bawah.)
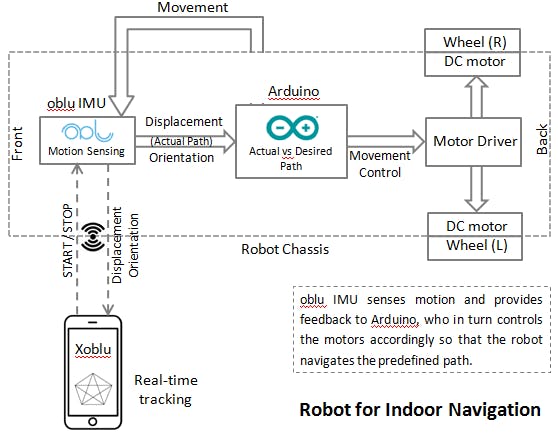
Singkatnya, Oblu merasakan gerakan dan mengomunikasikan informasi gerakan ke Arduino dan telepon secara berkala. Berdasarkan jalur yang diprogram dan informasi gerakan (dikirim oleh oblu), Arduino mengontrol gerakan roda. Pergerakan robot TIDAK dikendalikan dari jarak jauh kecuali untuk perintah start/stop.
Pemodelan jalur :
Robot dapat dikendalikan dengan baik jika berjalan dalam segmen garis lurus saja. Oleh karena itu, jalur harus terlebih dahulu dimodelkan sebagai kumpulan segmen garis lurus. Gambar di bawah ini berisi beberapa contoh jalur dan representasinya dalam hal perpindahan dan orientasi. Beginilah cara path diprogram di Arduino.
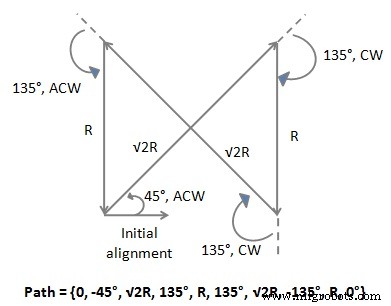
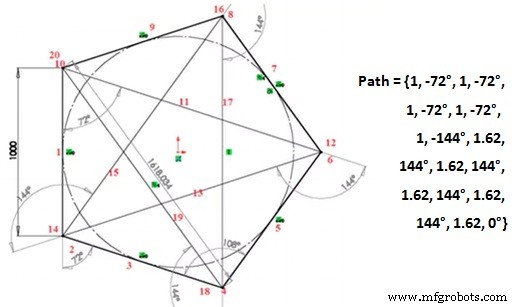
Demikian juga setiap jalur yang merupakan kumpulan segmen garis lurus, dapat didefinisikan dan diprogram di Arduino.
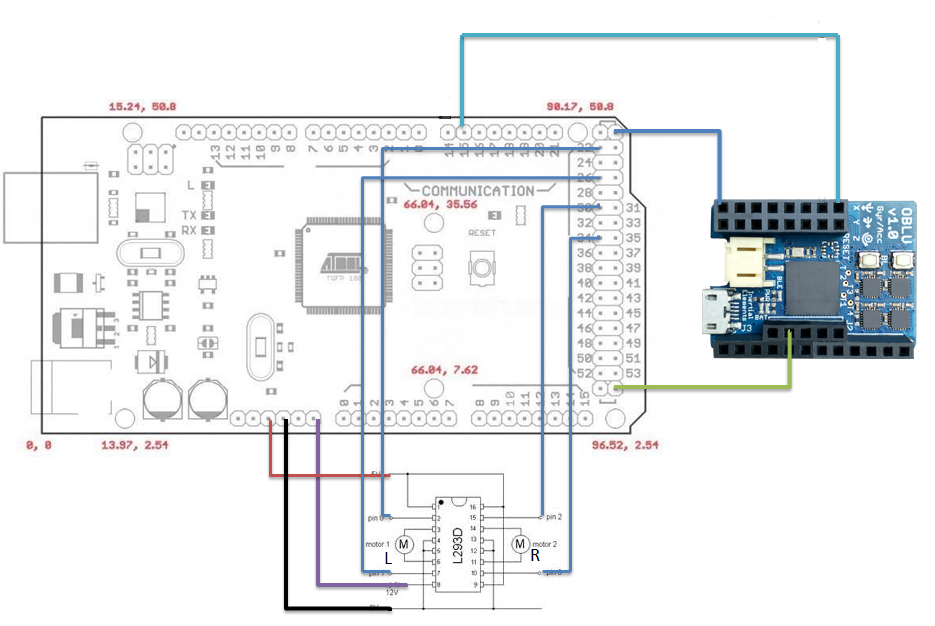
Perakitan Sirkuit:
Lihat bagian H/W untuk sambungan listrik antara Arduino, oblu, driver motor dan baterai.
Langkah 1 :Xoblu mengirimkan perintah START ke oblu
Langkah 2 :oblu mengakui menerima perintah dengan mengirimkan ACK yang sesuai ke Xoblu
Langkah 3 :oblu mengirimkan paket DATA yang berisi informasi perpindahan dan orientasi untuk setiap langkah, pada setiap langkah, ke Xoblu. (langkah =setiap kali mendeteksi gerakan nol atau berhenti terdeteksi).
Langkah 4 :Xoblu mengakui menerima paket DATA terakhir dengan mengirimkan ACK yang sesuai ke oblu. (Siklus langkah 3 dan 4 diulang sampai Xoblu mengirimkan STOP. Saat menerima perintah STOP, oblu menjalankan Langkah 5)
Langkah 5 :STOP - (i) Hentikan pemrosesan di oblu (ii) Hentikan semua output di oblu
Silakan lihat Catatan Aplikasi oblu untuk detail START, ACK, DATA, dan STOP
Bagaimana cara kerja Oblu IMU (opsional) :
Menyajikan beberapa referensi tentang gambaran umum Oblu dan prinsip dasar pengoperasian sensor PDR yang dipasang di kaki:
-> Kode sumber oblu yang tersedia ditargetkan untuk navigasi yang dipasang di kaki. Dan itu paling baik dioptimalkan untuk tujuan itu. Video di bawah ini mencakup prinsip dasar operasinya:
--> Berikut adalah beberapa artikel sederhana tentang sensor PDR yang dipasang di kaki:
1. Lacak langkah saya
2. Lanjutkan melacak langkah saya
--> Anda dapat merujuk dokumen ini untuk rincian tentang perhitungan kematian pejalan kaki menggunakan sensor kaki.
-> Video berikut untuk ikhtisar Oblu:
------------------P>
Silakan bagikan umpan balik, saran, dan tinggalkan komentar Anda.
Salam Sukses!
------------------P> Kode
robot berbasis arduino
Robot bergerak di jalur yang telah diprogram sebelumnya dan mengirimkan koordinatnya saat ini ke ponsel untuk pelacakan waktu nyata.https://github.com/vijkumsha/oblu_Robot Skema