

Proses manufaktur

Manufaktur industri
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Mengapa saya ingin membuat Robot Bajak Salju ? Karena saya tidak sensitif terhadap solusi untuk membuat hidup lebih mudah, saya mempertimbangkan ide untuk membuat dan mengusulkan solusi yang dapat membantu orang menghindari suhu dingin musim dingin dan kelelahan menggunakan sekop manual tradisional untuk singkirkan salju dari jalan setapak. Untuk melakukan ini, saya memilih sesuatu yang menyenangkan dan teknologi. Dengan cara ini saya memutuskan untuk mulai mengembangkan Robot Bajak Salju, dikendalikan dari jarak jauh, dengan mekanik yang kuat, elektronik kontrol, dan motor listrik yang bertenaga. Hasilnya adalah versi miniatur bajak salju asli dengan ulat, bilah bermotor (yang dapat diangkat dan dipindahkan) dan proyektor ringan yang dipasang di atas untuk menerangi jalan dalam gelap. Robot dapat dikendalikan dari jarak jauh dengan remote control PlayStation.
Dalam video berikut Anda dapat melihat robot bajak salju beraksi, seseorang mengatakan kepada saya bahwa tampaknya untuk menyekop robot bajak salju harus mengambil langkah, TIDAK BEGITU , Saya telah membuat video untuk menunjukkan bagaimana salju dihilangkan.
Bagaimana cara membuatnya?
Robot terdiri dari kerangka yang menopang bilah bermotor (yang dapat diangkat dan dipindahkan) dan sistem traksi yang terdiri dari motor listrik, roda, dan lintasan ulat. Sasis diwujudkan dengan batang besi bagian persegi panjang yang dilas menjadi satu. Ukuran robot adalah 600X375X240 mm, tidak termasuk bilahnya, dan beratnya sekitar 30 kg.
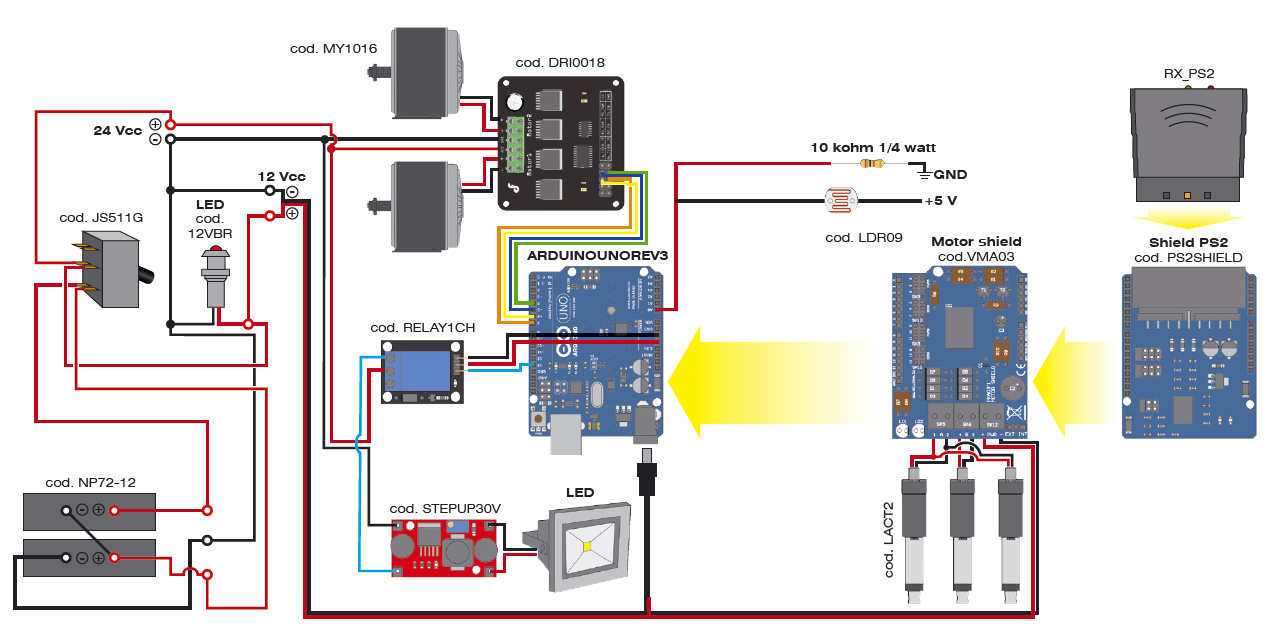

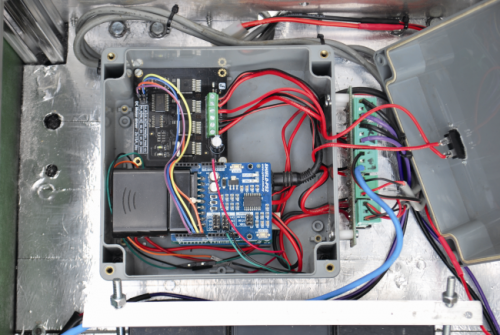
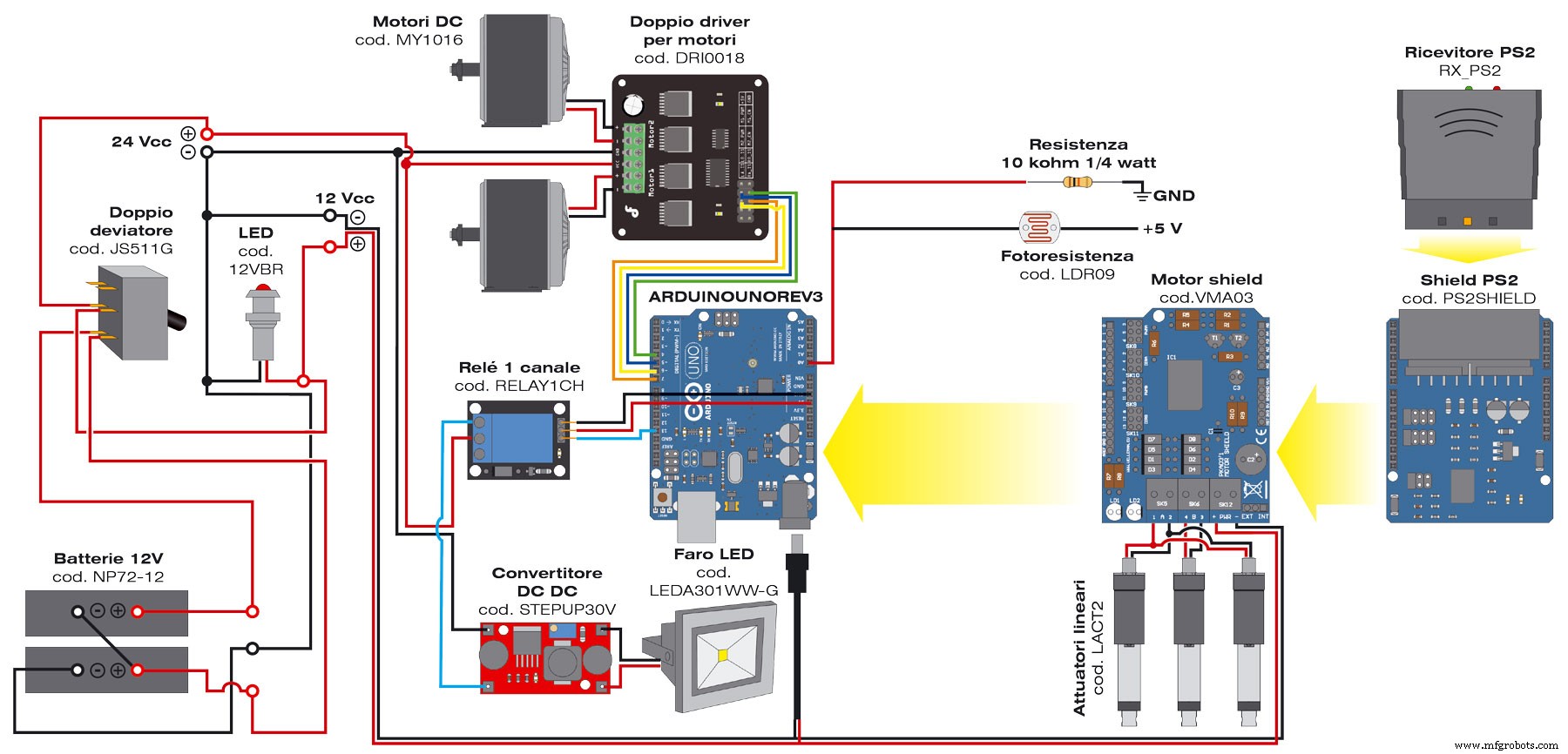
Bagian listrik dan elektronik dari bajak salju didasarkan pada Arduino Uno, yang menampung tiga pelindung dan berinteraksi dengan:
Pelindung yang dipasang di Arduino adalah pelindung motor untuk mengontrol tiga motor linier yang mengatur pergerakan blade dan PS2SHIELD, yang memungkinkan Anda berinteraksi dengan PlayStation 2 (PS2); yang terakhir membutuhkan RX-PS2, yang merupakan penerima radio 2,4 GHz untuk mengirim/menerima perintah khusus dari konsol yang disebutkan di atas. Diagram pengkabelan robot adalah apa yang Anda temukan di halaman ini; sumber listrik dibuat oleh rangkaian dua baterai gel timbal dengan 7,2 Ah:kami mengambil 12 V dari koneksi titik tengah keduanya, sedangkan antara negatif dan positif dari seri kami mengambil 24 volt. Sebuah saklar (125V, 2×15 ampere) mengontrol dua jalur suplai. Dengan 12 volt, kami menjalankan Arduino, yang akan memberi daya pada perisai melalui pin-stripnya; LED (memasang resistor pembatas secara internal) akan menunjukkan saat Arduino sedang berjalan.
12 volt langsung dari tumpukan baterai juga memberi makan bagian daya pelindung motor. Faktanya, karena penyerapan tiga aktuator linier (cod. LACT2) tinggi, tidak disarankan untuk mengambil 12 V dari Arduino:Anda memilih catu daya eksternal untuk diberikan ke terminal PWR yang sesuai. Untuk menggunakan catu daya eksternal, Anda harus memindahkan jumper (pada pelindung) di dekat terminal, antara pusat dan EXT. Pengelolaan perisai memerlukan perpustakaan khusus untuk Arduino, disertakan dengan komponen. Setiap aktuator linier disusun oleh motor roda gigi 12 Vdc menggunakan sekrup cacing untuk menggerakkan poros maju mundur sepanjang panjangnya (ekskursi maksimum 5 cm).
Aktuator memiliki beban dinamis 50 kg dan kecepatan maksimum 1,3 cm/s. Ia mampu menopang hingga sekitar 250 kg, saat tidak bergerak, dan torsi memastikan pemeliharaan posisi poros bahkan tanpa daya. Dua sakelar batas menyediakan mesin untuk berhenti ketika mencapai ekstensi dan kontraksi maksimum, sedangkan dioda memungkinkan arah sebaliknya setelah mencapai titik batas. Aktuator terbuat dari logam dan disegel untuk melindunginya dari debu dan air (peringkat IP63).
Sekarang mari kita beralih ke jalur suplai 24 volt, yang memberi makan bagian daya bajak salju, yang merupakan bagian traksi dan proyektor (opsional):yang pertama didasarkan pada driver motor, untuk dihubungkan dengan empat kabel ke jumlah yang sama dari jalur digital Arduino. Pengemudi motor adalah driver daya jembatan ganda yang mampu menggerakkan dua motor yang disikat secara terus menerus dengan tegangan maks 35 VDC dan arus 15 A (masing-masing).
Dengan berinteraksi dengan Arduino dan hanya menggunakan empat I / O digital (2 PWM), Anda dapat memilih arah putaran dan kecepatan motor. Sirkuit ini memiliki empat pin kontrol, empat LED yang menunjukkan arah putaran motor, dua pin untuk catu daya papan (5 Vdc) dan dua heat sink aluminium yang terletak di bagian belakang sirkuit tercetak, yang diperlukan untuk menghilangkan panas yang dihasilkan selama operasi dengan kekuatan penuh.
Untuk pengelolaan driver oleh Arduino, pabrikan menyediakan library khusus. Blok terminal keluaran memungkinkan Anda untuk menghubungkan kedua mesin, untuk dihubungkan seperti yang ditunjukkan oleh diagram (jangan membalikkan polaritas, jika tidak trek akan berjalan terbalik!) menggunakan kabel dengan bagian setidaknya 1,5 mm persegi. Tentang input kontrol, koneksi antara Arduino dan konektor pengontrol pitch 2.54 harus diperhatikan; korespondensi yang diperlukan saat menggunakan perpustakaan yang disediakan oleh pabrikan dan firmware kami:jika Anda mengeditnya, Anda harus merevisi koneksi.
Ingatlah bahwa DIR adalah level logika untuk mengatur arah putaran motor dan PWM adalah sinyal PWM untuk memerintahkan driver daya. Untuk mengidentifikasi kontak konektor pengontrol, cukup merujuk ke layar sutra yang terlihat di sebelahnya di sisi komponen papan sirkuit. Selain pengontrol mesin, 24 volt akan memberi daya pada bagian proyektor LED, Anda dapat memasang atau tidak; jika dipasang, kabel yang dihormati ditunjukkan dan ingat untuk mengambil 24 V positif dari kartu relai (cod. RELAY1CH). Yang terakhir menampung relai dan transistor penggerak masing-masing yang dikendalikan oleh Arduino melalui Digital I/O 13; Arduino juga memberi daya pada kartu, melalui +5V dan ground (GND).
Relai memungkinkan menghidupkan dan mematikan proyektor, menargetkan tindakan pada sirkuit yang sesuai. Proyektor dirancang untuk beroperasi pada 220 Vac, namun karena tegangan ini tidak tersedia pada robot, untuk menghindari penggunaan inverter kami memodifikasi proyektor dengan membukanya, melepas AC / DC dan membawa dua kabel LED daya secara langsung ke output konverter DC / DC (cod. STEPUP30V); yang terakhir adalah konverter pensaklaran dengan tegangan keluaran yang dapat diatur, yang harus disetel untuk memberikan arus ke LED seperti untuk membuatnya bekerja sekitar 10 watt. Biasanya ini dicapai pada sekitar 30 volt. Namun ingat bahwa daya diberikan oleh produk VxI, (arus dengan tegangan, dalam watt diperoleh jika V dalam volt dan I dalam ampere), maka untuk 30 V, konsumsi arus harus di bawah 340 mA. Meskipun rangkaian LED secara internal terlindungi dari arus lebih, STEPUP30V memiliki batasan arus keluaran hingga 2A sehingga dapat berguna untuk menggantinya dengan DC/DC yang dilengkapi dengan pembatas arus keluaran.
Menerima data dari kendali jarak jauh adalah pekerjaan yang dilakukan oleh pelindung PS2SHIELD, di mana pabrikan menyediakan perpustakaan khusus. Perisai melakukan penerimaan dan decoding perintah; bagian radio diserahkan ke RX _PS2, yang dimasukkan ke dalam konektor terkait. Hal terakhir yang perlu diperhatikan adalah fotoresistor, yang digunakan oleh Arduino untuk mendeteksi pencahayaan sekitar dan untuk mengontrol papan RELAY1CH sehingga proyektor LED menyala; komponen diumpankan ke pembagi tegangan oleh resistor 10 kOhm (1/4 W) dan dibaca dari input analog A0 Arduino. 5 volt diambil dari Arduino 5V. Sensor cahaya ini melakukan hal yang sederhana:dalam kondisi pencahayaan yang baik, resistansi fotoresistor rendah dan tegangan yang dibaca oleh ADC mikrokontroler Arduino rendah dan tidak memicu papan relai; sebaliknya kegelapan, meningkatkan resistensi banyak dan ADC membaca tegangan mendekati 5 volt, yang menyebabkan proyektor menyala.
INSTRUKSI MEMBANGUN
PANDUAN CEPAT
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Proses manufaktur
Komponen dan persediaan Arduino Mega 2560 × 1 NEO 6 GPS × 1 Adafruit SD Card Shield × 1 Adafruit SD Card Shield × 1 Seeedstudio gprs shield V2.0 × 1 Seeed GPRS Shield V2.0 × 1 Kabel jumper (generik) × 1 Baterai 9V (generik)
Selamat datang di Tutorial Arduino keempat dari Seri Tutorial Arduino kami. Dalam tutorial ini kita akan mempelajari cara mengontrol Motor DC dan Servo menggunakan PWM (Pulse Width Modulation). Ini adalah Video Tutorial Langkah demi Langkah yang mudah diikuti. Selain itu, di bawah video Anda dapat
Dalam tutorial ini kita akan belajar bagaimana membangun Robot Roda Arduino Mecanum yang mampu bergerak ke segala arah. Mobilitas unik robot ini dicapai dengan menggunakan roda jenis khusus, yang disebut Roda Mecanum. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini. R
Dalam tutorial ini saya akan menunjukkan kepada Anda bagaimana saya membangun sebuah hexapod Arduino. Seperti namanya, hexapod memiliki 6 kaki tetapi selain itu, ia juga memiliki ekor atau perut, kepala, antena, rahang bawah, dan bahkan mata yang berfungsi. Semua ini membuat hexapod terlihat seperti