Tentang proyek ini
Dalam proyek ini saya datang dengan ide yang dapat diimplementasikan ke tangan prostetik cetak 3D yang ada. Dalam prostesis bertenaga listrik yang ada, saya tidak dapat menemukan penggunaan teknologi penginderaan sentuh kapasitif untuk aktuasi jari . Proyek ini menggabungkan dua hal yang sangat keren, Arduino dengan penginderaan sentuh kapasitif untuk aktuasi dan remix tangan e-NABLE Phoenix desain.
Pada dasarnya tangan Phoenix adalah tangan bertenaga tubuh. Apa yang telah saya lakukan pada proyek ini adalah mengubahnya menjadi prostesis bertenaga listrik dengan memilih desain suku cadang yang diperlukan.
Keuntungan dari penginderaan sentuh kapasitif adalah, melalui sentuhan Anda dapat menggerakkan jari dengan mudah. Saat ini model ini tidak dapat mengontrol jari individu dan pengembangan lebih lanjut diperlukan dalam kapasitas membawa beban dan kapasitas menggenggam.
Kumpulkan Bagian: 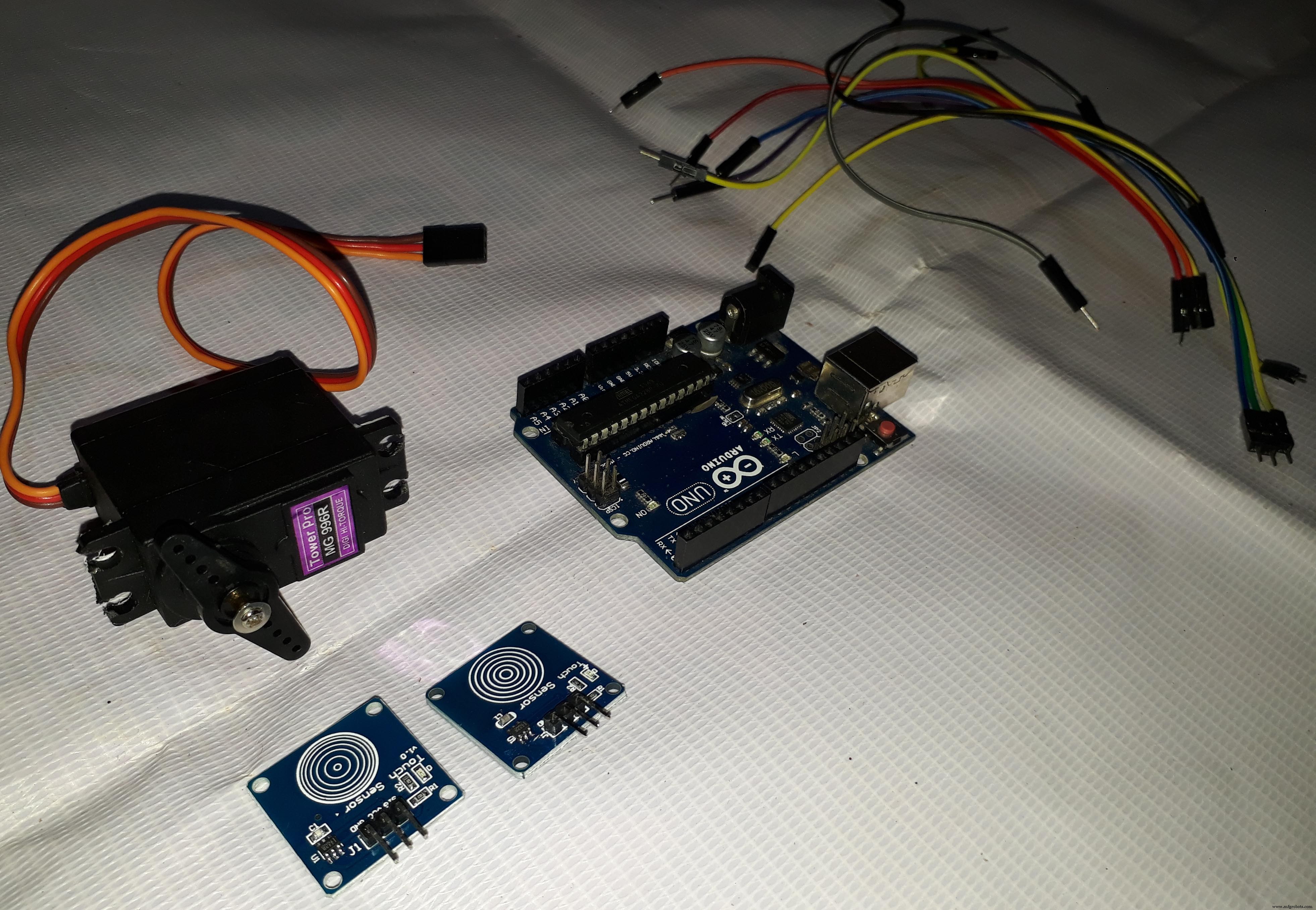
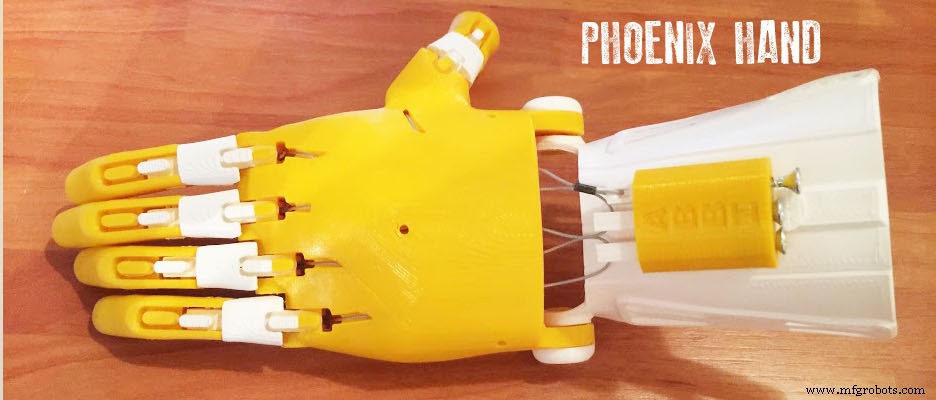
Perakitan Tangan Phoenix:
Detail Perakitan tangan Phoenix disebutkan dalam langkah-langkah berikut...
Saya telah menggunakan flexor sebagai pancing dan ekstensor sebagai karet gelang
Alat:
Mencetak Tangan:
Proyek ini menggunakan e-NABLE yang dirancang sebelumnya Tangan Phoenix .
Sesuai kebutuhan saya, saya hanya mencetak bagian berikut
Jari
- finger_phalanx.stl -4 buah
- ujung jari_long.stl -2 buah
- ujung jari_short.stl -2 buah
- thumb_phalanx.stl -1 buah
Telapak Tangan
- palm_right_new_supports.stl -1 buah
Jepret Pin
- ujung jari_pin.stl - 4 buah
- knuckle_pin_long.stl -1 buah
- knuckle_pin_short.stl -2 buah
- thumb_knuckle_pin.stl - 1 buah
- ujung jempol_pin.stl - 1 buah
Karena sudah ada petunjuk rinci tentang cara membuat ini, saya tidak akan membahasnya secara detail
Untuk mencetak saya menggunakan printer 3D Flsun. Secara total, butuh 10-12 jam untuk mencetak
(catatan:bagian ini untuk tangan kanan)
Perakitan Tangan:
Proses pembuatan tangan Phoenix sudah tersedia, jadi saya tidak akan membahas terlalu banyak detail. Jika Anda memiliki keraguan, silakan tinggalkan komentar.
Saya telah menggunakan fleksor sebagai pancing dan ekstensor sebagai karet gelang.
** beberapa penghalusan mungkin diperlukan untuk kecocokan yang mulus
Bagian Elektronik:
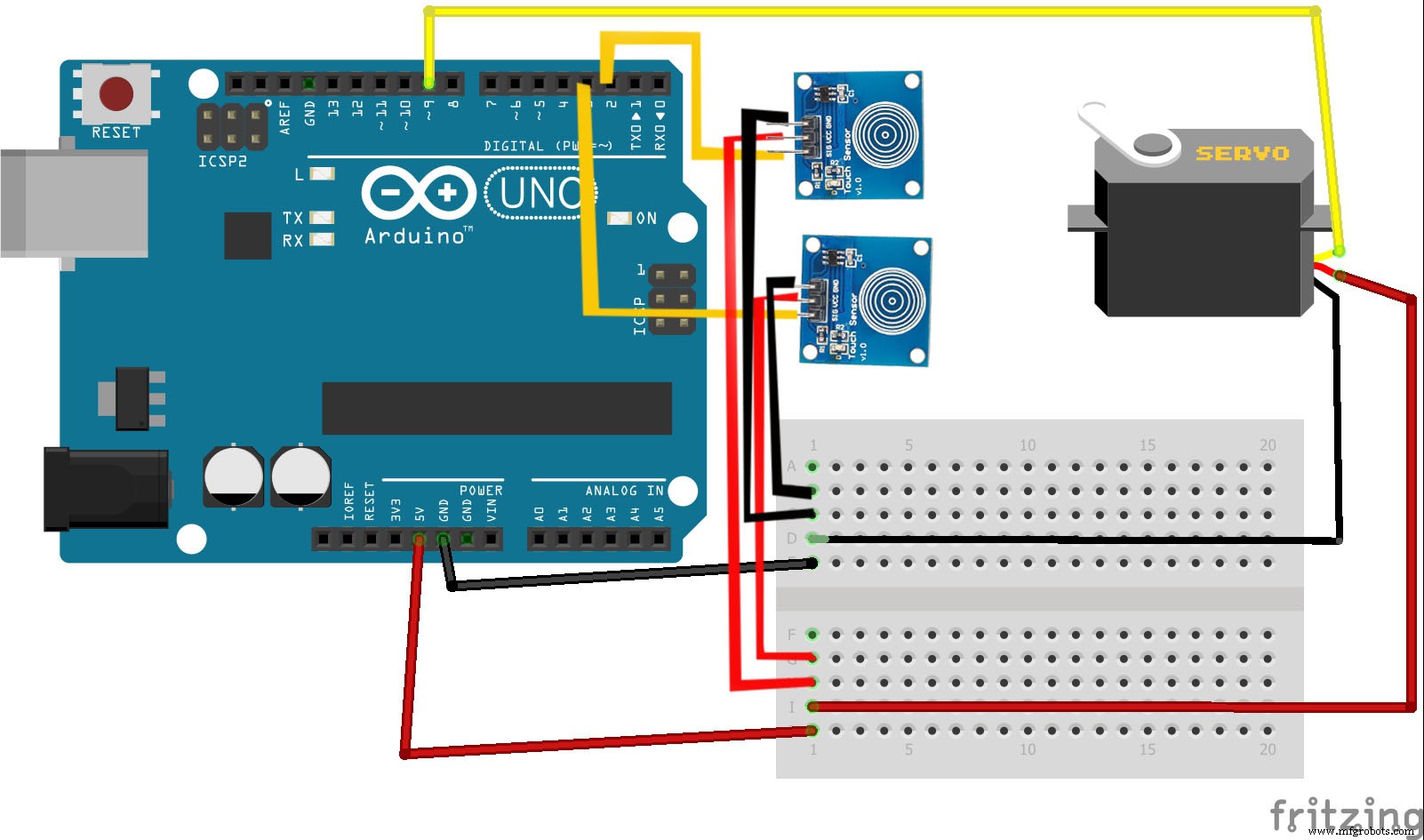
Aktuasi dikendalikan melalui 2 sensor sentuh (TTP223), Input dari sensor sentuh membuka dan menutup jari melalui motor servo.
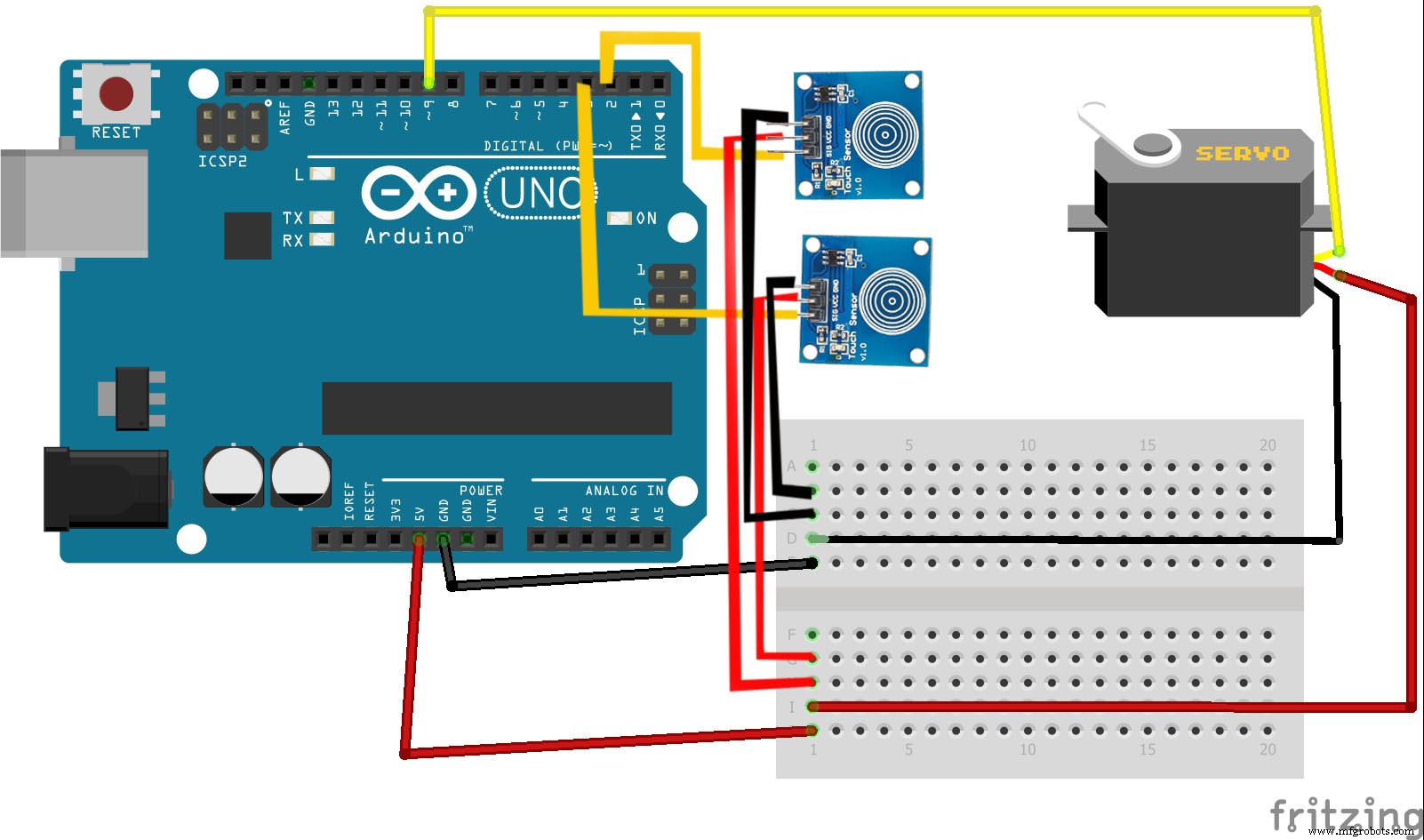
Diagram Sirkuit dan Kode Arduino:
Senang membuat!
Terima kasih banyak telah membaca jika Anda memerlukan informasi lebih lanjut, jangan ragu untuk bertanya di komentar, dan saya akan melakukan yang terbaik untuk menjawab Anda.
Kode:
#include Servo myservo; #define CTS1Pin 2 // Pin untuk sensor sentuh kapasitif 1#define CTS2Pin 3 // Pin untuk sensor sentuh kapasitif 2int pos;void setup() { myservo.attach(9); // menempelkan servo pada pin 9 ke objek servo}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH){ for (pos =0; pos <=180; pos +=1) myservo.write(pos); penundaan (15); } if(CTSValue2==HIGH) { untuk (pos =180; pos>=0; pos -=1) myservo.write(pos); penundaan (15); }}
Kode
Sketsa ArduinoArduino
#include Servo myservo; #define CTS1Pin 2 // Pin untuk sensor sentuh kapasitif 1#define CTS2Pin 3 // Pin untuk sensor sentuh kapasitif 2int pos;void setup() { myservo.attach(9); // menempelkan servo pada pin 9 ke objek servo}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH) { for (pos =0; pos <=180; pos +=1) myservo.write(pos); penundaan (15); } if(CTSValue2==HIGH) { untuk (pos =180; pos>=0; pos -=1) myservo.write(pos); penundaan (15); } }
Skema