Apa itu Post Processor Editor dan Bagaimana Anda Menggunakannya?
Anda menggunakan robot simulasi atau mesin CNC… tetapi tidak bekerja dengan benar. Mungkinkah sudah waktunya untuk menggunakan editor pengolah pos?
Apa yang dilakukan pemroses pos dan mengapa Anda ingin mengeditnya?
Jika Anda menggunakan pemrograman offline, kemungkinan besar Anda telah berinteraksi dengan prosesor pos. Mungkin Anda menggunakan RoboDK untuk memprogram robot untuk pemesinan robot atau aplikasi robot lainnya. Atau mungkin Anda menggunakan sistem CAD/CAM yang mendukung mesin CNC Anda.
Bahkan jika Anda tidak menyadarinya, Anda menggunakan prosesor pos setiap kali Anda menggunakan sistem tersebut untuk memprogram mesin fisik Anda.
Prosesor pos adalah jembatan antara lingkungan simulasi dan mesin fisik Anda. Ini mengubah instruksi simulasi menjadi kode yang dapat digunakan robot.
Tapi, bagaimana jika Anda ingin mengubah bagaimana program menghasilkan kode ini? Di situlah editor prosesor pos masuk…
Mengapa Anda Perlu Mengedit Prosesor Postingan?
Kebanyakan orang tidak perlu mengedit prosesor pos mereka.
Jika Anda menggunakan RoboDK, misalnya, Anda cukup mengunduh model robot Anda dari Perpustakaan Robot kami yang luas. Kami telah menautkan setiap model ke salah satu dari 80+ prosesor pos dalam RoboDK. Setiap kali Anda mengirim program simulasi Anda ke robot fisik, prosesor pos akan mengonversi kode untuk Anda "di bawah tenda".
Namun, ada beberapa situasi ketika Anda perlu mengedit prosesor pos Anda.
Setiap produsen robot menggunakan bahasa pemrograman miliknya sendiri, yang berjalan pada pengontrol robotnya sendiri. Setiap pengontrol memiliki berbagai opsi dan fitur konfigurasi yang berbeda. Pemroses pos adalah tempat Anda dapat mengatur semua opsi konfigurasi khusus ini.

Misalnya, pengontrol robot Techman menyertakan opsi keamanan untuk meminta kata sandi kepada pengguna sebelum mereka dapat memprogram ulang robot. Prosesor pos adalah tempat Anda akan menemukan opsi untuk mengaktifkan, menonaktifkan, dan mengatur kata sandi ini. Tidak semua robot memiliki opsi ini.
Apa itu Editor Pemroses Pos?
Editor pasca prosesor adalah perangkat lunak khusus yang digunakan untuk mengedit file robot atau prosesor pasca CNC. Hal ini membuat pengeditan pasca prosesor lebih intuitif dibandingkan dengan editor teks standar, yang merupakan satu-satunya pilihan untuk banyak sistem pemrograman.
Contoh perangkat lunak tersebut adalah editor pasca prosesor yang disertakan dalam RoboDK.
Post processor RoboDK ditulis dalam bahasa pemrograman Python. Untuk setiap pemroses pos yang didukung, ada pustaka yang dikompilasi (file PYC) dan skrip Python yang dapat diedit yang menyimpan semua properti konfigurasi.
File konfigurasi ini dapat diedit dengan editor teks standar apa pun jika Anda ingin kontrol penuh atas konfigurasi. Namun, RoboDK juga menawarkan editor pasca prosesor yang lebih intuitif. Ini memungkinkan Anda untuk mengubah parameter robot pilihan Anda tanpa harus terlibat dalam kode sama sekali.
Cara Mengedit Prosesor Postingan dengan Cara Mudah
Di RoboDK, cara termudah untuk mengedit prosesor pos Anda adalah dengan menggunakan editor prosesor pos kami. Ini memberikan informasi tentang kapan Anda kemungkinan besar akan menggunakan setiap parameter dan nilai yang direkomendasikan. Dengan alat ini, Anda akan mencakup sebagian besar kasus penggunaan untuk robot Anda.
Setiap prosesor pos berisi daftar properti konfigurasi. Ini akan bervariasi tergantung pada produsen robot Anda.
Beberapa prosesor pos menyertakan sangat sedikit properti. Misalnya, pemroses pos untuk robot Mecademic hanya menyertakan satu properti (jenis file dari file program).
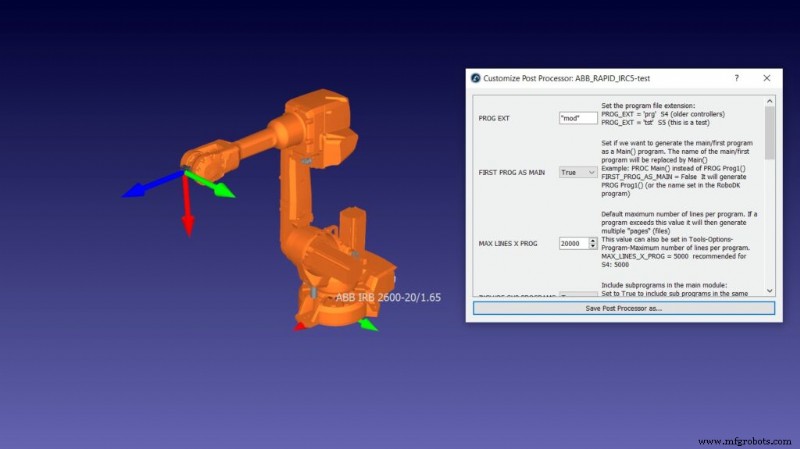
Pemroses pos lainnya mencakup banyak properti. Misalnya, prosesor pos ABB_RAPID_IRC5 untuk robot ABB memiliki 16 properti, mulai dari kecepatan default robot hingga flag konfigurasi untuk turntable eksternal.
Robot apa pun yang Anda gunakan, cara paling sederhana untuk mengedit prosesor posnya adalah dengan memuatnya di editor RoboDK. Anda akan dapat melihat semua properti konfigurasi yang tersedia dan memutuskan mana yang paling cocok untuk aplikasi Anda.
Panduan Pengeditan Prosesor Postingan Sederhana
Saat Anda membuka editor pengolah pos, Anda akan disambut oleh daftar properti yang tersedia.
Bagaimana Anda memutuskan properti mana yang akan disesuaikan dan nilai apa yang akan ditetapkan?
Mari kita gunakan contoh spesifik untuk menunjukkan prosesnya... Kita akan melihat prosesor pos AUBO untuk jajaran robot kolaboratif perusahaan.
Pemroses pos AUBO berisi properti berikut:
- PROG EXT — Ini adalah ekstensi program dan disertakan dalam banyak prosesor pos. Ini menentukan jenis file yang akan dihasilkan RoboDK.
- SPEED MS dan SPEED RAD — Ini menentukan kecepatan dalam meter per detik dan radian untuk gerakan melingkar.
- ACCEL MSS dan ACCEL RADSS — Ini menentukan percepatan robot dalam meter per detik kuadrat atau radian per detik kuadrat untuk percepatan melingkar.
Seperti yang Anda lihat, properti seringkali jelas hanya dari konvensi penamaannya. Namun, jika tujuan suatu properti tidak langsung jelas, biasanya ada deskripsi properti tersebut di editor dan nilai yang sering direkomendasikan juga.
Jika Anda masih tidak dapat mengetahui tujuan dari properti tertentu, Anda mungkin dapat menemukan informasi di manual robot Anda atau Anda dapat mengajukan pertanyaan di forum RoboDK.
Di mana menemukan Editor Pemroses Pos RoboDK Baru
Mulai mengedit prosesor pos robot Anda dengan editor RoboDK!
Anda dapat menemukan informasi tentang cara mengaktifkan dan menggunakan editor di halaman dokumentasi kami.
Pertanyaan? Beri tahu kami di komentar di bawah atau bergabung dengan diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.. Juga, lihat koleksi video kami yang luas dan berlangganan Saluran YouTube RoboDK


