Studi Kasus:Bagaimana Robotika Kane Mencapai Pemolesan Orbital Dengan RoboDK
Penyelesaian permukaan dengan robot — ini adalah aplikasi yang mungkin belum pernah Anda pertimbangkan sebelumnya.
Anda mungkin bertanya-tanya:Apakah ada efektor akhir yang bagus untuk melakukan pengamplasan atau pemolesan dengan robot? Dan seberapa mudah memprogram robot dengan efektor akhir seperti itu?
Namun, tim di Kane Robotics menemukan cara untuk dengan mudah mengintegrasikan robot mereka dan efektor akhir pengamplasan orbital baru dengan RoboDK.
Mari kita lihat bagaimana mereka melakukannya!
Pengamplasan dan pemolesan adalah jenis tugas yang secara tradisional sulit untuk diotomatisasi. Di masa lalu, Anda harus berinvestasi besar untuk mesin amplas otomatis — jenis yang akan menghabiskan setengah ruang di bengkel Anda dan menghabiskan sedikit biaya — atau Anda harus melakukan tugas tersebut secara manual.
Masalah dengan melakukan finishing permukaan secara manual adalah memakan waktu, kerja keras secara fisik, dan memberikan kualitas yang tidak konsisten. Kedengarannya seperti tugas yang sempurna untuk robot!
Dalam beberapa tahun terakhir, finishing permukaan dengan robot industri kini telah menjadi pilihan yang layak. Dengan menambahkan sensor gaya ke efektor ujung robot, Anda dapat menggunakan kontrol gaya untuk memberikan penyelesaian permukaan yang konsisten dengan alat pengamplasan orbital.
Hasilnya, robot industri kini dapat digunakan untuk tugas penyelesaian permukaan yang memerlukan tingkat konsistensi tinggi, seperti pemolesan bilah baling-baling untuk pesawat…
… itulah yang telah dilakukan tim di Kane Robotics.
Memperkenalkan… Robotika Kane
Kane Robotics adalah perusahaan integrasi otomatisasi yang berbasis di California, AS. Mereka terutama melayani sektor penerbangan dan kedirgantaraan dan memberikan solusi otomatisasi untuk produsen campuran tinggi/produksi rendah.
Mereka menggambarkan misi perusahaan mereka sebagai:“membebaskan tenaga kerja ahli kedirgantaraan dari tugas manufaktur berulang yang memakan waktu melalui penggunaan solusi otomatisasi yang inovatif, berbiaya rendah, dan fleksibel.”
Secara khusus, mereka membantu produsen dirgantara dengan aplikasi seperti penggilingan, pengamplasan, penyelesaian akhir, pengeluaran epoksi, pengeboran, dan perawatan mesin.
Proyek perusahaan melibatkan pemolesan bilah baling-baling untuk pesawat terbang.
Proyek:Pemolesan Baling-Baling Baling-Baling
Baling-baling baling-baling adalah bagian rekayasa yang halus dan mengesankan. Mereka adalah sarana utama di mana pesawat terbang mencapai daya dorongnya di udara. Kesalahan apa pun dalam proses pembuatannya dapat menyebabkan inefisiensi dalam propulsi pesawat atau, dalam kasus terburuk, bencana.
Tahap pemolesan sangat penting dalam pembuatan pesawat terbang. Penyelesaian permukaan yang buruk dapat menyebabkan hambatan yang tidak perlu di udara dan menyebabkan pesawat menggunakan lebih banyak bahan bakar daripada yang diperlukan.
Selain itu, Administrasi Penerbangan Federal (FAA) sangat menyarankan agar tidak memoles setelah baling-baling diproduksi karena dapat merusak lapisan pelindung halus yang ditambahkan ke permukaan bilah. Akibatnya, tahap pemolesan selama pembuatan adalah saat terakhir untuk mendapatkan permukaan akhir yang sangat penting.
Tim di Kane Robotics mulai memproduksi aplikasi pemolesan menggunakan robot dan efektor ujung pengamplasan orbital tipe baru yang dirancang khusus untuk penyelesaian permukaan robot.
Robot diharuskan memoles bilah baling-baling secara akurat menggunakan efektor ujung ini.

Mengintegrasikan Orbital Sander yang Siap Robot Dengan RoboDK
Sebagian dari motivasi tim untuk menjalani proyek ini adalah untuk menguji efektor akhir pengamplasan orbital baru yang mereka gunakan.
Masalah umum dengan finishing permukaan robot adalah membutuhkan kontrol kekuatan. Saat kami mengampelas atau memoles dengan tangan, kami dapat secara tepat mengontrol gaya yang diterapkan oleh alat finishing. Dengan robot, cara paling umum untuk melakukannya adalah dengan menambahkan sensor gaya dan memprogram kepatuhan aktif ke dalam alat. Ini bisa jadi sulit untuk diprogram.
Efektor akhir yang digunakan Kane Robotics mempermudah penerapan penyelesaian permukaan robotik daripada sebelumnya dengan memasukkan kepatuhan ke dalam alat itu sendiri.
Orbital Sander yang Sesuai
Efektor akhir yang dimaksud adalah AOV-10 Compliant Orbital Sander dari ATI, juga tersedia sebagai komponen UR+.
Alat baru ini dirancang khusus untuk memudahkan pengamplasan robot. Ini menggabungkan kepatuhan pneumatik ke dalam sumbu alat pengamplasan orbital, memberikan robot kemampuan untuk bereaksi terhadap perubahan halus pada permukaan benda kerja.

Seperti yang dijelaskan Alan Hiken, COO Kane Robotics:
Salah satu keuntungan menggunakan RoboDK dengan opsi End of Arm Tooling (EOAT) baru seperti ini adalah sangat mudah untuk menambahkan efektor akhir baru di dalam perangkat lunak, seperti yang kami jelaskan di artikel kami sebelumnya Panduan 5 Menit untuk Menggunakan Semua Ujung Efektor dengan RoboDK.
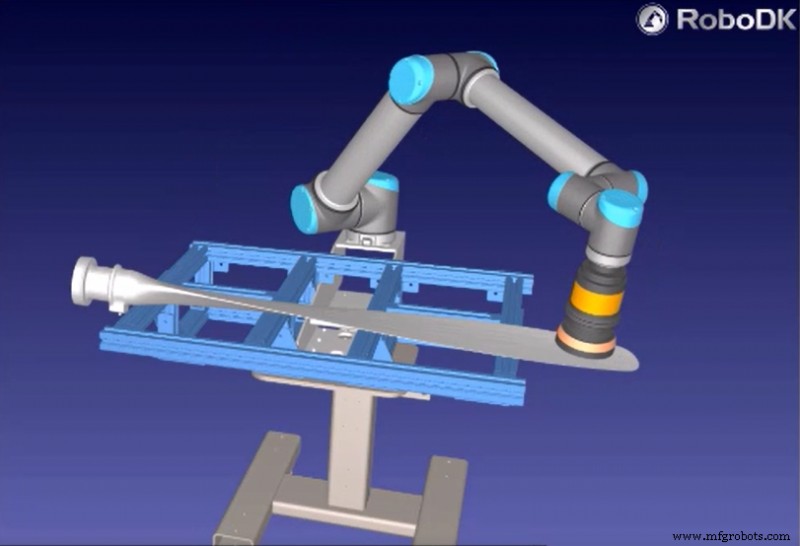
Pengaturan Perangkat Keras dan Perangkat Lunaknya
Penyiapan yang digunakan oleh tim di Kane Robotics cukup sederhana, berkat alat pengamplasan ATI.
Komponen utama penyiapannya adalah:
- Robot kolaboratif Robotika Universal.
- Alat pengamplasan orbit ATI AOV-10.
- Meja tempat baling-baling dipasang.
- RoboDK untuk pemrograman offline.
Tanpa pengamplas orbital khusus ini, tim mungkin harus mengintegrasikan sensor gaya eksternal. Ini akan meningkatkan kerumitan penyiapan perangkat keras dan pemrograman robot.
Dengan RoboDK, pemrograman mereka menjadi sederhana.
Mengapa Robotika Kane Menggunakan RoboDK?
RoboDK memungkinkan tim untuk mengaktifkan dan menjalankan aplikasi dengan cepat dan mudah.
Pemrograman hanya terdiri dari aktivitas perencanaan jalur, yang dapat dicapai di RoboDK hanya dalam beberapa langkah.
Inilah yang COO Alan Hiken katakan tentang RoboDK:
Ketika ditanya mengapa mereka menggunakan RoboDK, dia hanya menjawab:“Jika Anda memiliki data CAD, mengapa Anda tidak menggunakannya?”
Kami hampir tidak bisa berdebat!
Aplikasi apa yang dapat Anda capai dengan RoboDK? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


