Kinematika Terbalik dalam Robotika:Yang Perlu Anda Ketahui
Apa itu kinematika terbalik?
Seberapa banyak yang perlu Anda ketahui untuk mendapatkan hasil maksimal dari robot Anda?
Kinematika terbalik untuk robotika adalah topik yang besar dan seringkali kompleks. Bergantung pada proyek Anda, Anda mungkin perlu mengetahuinya dengan sangat mendetail atau memahaminya dengan pengetahuan dasar.
Berikut adalah informasi penting yang perlu Anda ketahui tentang kinematika terbalik untuk robotika.
Apa itu Kinematika Terbalik?
Kinematika terbalik adalah proses matematika yang digunakan untuk menghitung posisi sendi yang diperlukan untuk menempatkan efektor ujung robot pada posisi dan orientasi tertentu (juga dikenal sebagai "pose"). Solusi kinematik terbalik yang andal diperlukan untuk memprogram robot untuk melakukan tugas.
Penting untuk memperjelas perbedaan antara kinematika terbalik dan kinematika maju robot.
Kinematika maju menentukan di mana efektor akhir akan berada jika sambungan diatur ke posisi tertentu. Hanya ada satu solusi untuk persamaan kinematika maju. Ketika sendi diatur ke posisi tertentu, efektor akhir akan selalu berakhir di tempat yang sama.
Dengan kinematika terbalik, seringkali ada beberapa solusi berbeda dan beberapa pendekatan untuk menghitung solusi kinematik terbalik.
Mengapa Kita Membutuhkan Kinematika Terbalik dalam Robotika
Jika kita tidak memiliki kinematika terbalik, pemrograman robot akan sangat sulit… jika bukan tidak mungkin.
Saat Anda ingin end effector robot Anda pindah ke tempat tertentu di ruang kerjanya, masuk akal jika Anda memasukkan pose yang diinginkan ke dalam program.
Tapi, Anda tidak bisa begitu saja memberi tahu robot untuk pergi ke X, Y, dan Z yang Anda inginkan mengoordinasikan dan berharap robot memahami instruksi Anda… bukan tanpa kinematika terbalik.
Sebagian besar robot industri dibuat dari beberapa sambungan artikulasi yang dapat dikontrol secara independen. Setiap sambungan terhubung ke satu atau lebih sambungan lainnya, terkadang dalam konfigurasi yang kompleks. Efektor akhir terpasang di ujung seluruh "rantai kinematik". Saat Anda menggerakkan salah satu sendi, ini akan memengaruhi pose efektor akhir dalam berbagai cara.
Ini berarti bahwa tidak ada hubungan langsung yang sederhana antara posisi efektor akhir dan satu sendi tertentu.
Misalnya, jika Anda ingin ujung efektor robot bergerak 1 mm secara linier di sepanjang sumbu Z, Anda mungkin perlu memindahkan semua sambungan dengan jumlah yang berbeda.
Terakhir, algoritme kinematika terbalik menghitung posisi yang tepat dari setiap sendi robot yang diperlukan untuk mencapai pose efektor akhir yang Anda inginkan.
Cara Menemukan Kinematika Terbalik dari Lengan Robot
Ketika Anda melakukan penelitian tentang kinematika terbalik untuk robotika, Anda akan sering menemukan halaman dan halaman persamaan, rumus, dan deskripsi algoritma. Ini karena menghitung kinematika terbalik adalah bidang yang sudah mapan dalam penelitian robotika. Tidak banyak orang berbicara tentang kinematika terbalik di luar bidang penelitian (kecuali untuk animator 3D).
Namun, saat kita menggunakan robot untuk aplikasi industri, ada 2 opsi dasar untuk menemukan solusi kinematika terbalik:
- Anda dapat melakukan semua pekerjaan matematika dan pemrograman sendiri untuk membuat pemecah kinematik terbalik untuk robot spesifik Anda.
- Anda dapat menggunakan pemecah kinematik terbalik yang ada untuk robot spesifik Anda yang bekerja "di luar kotak".
Manakah yang Anda pilih akan bergantung pada situasi unik Anda.
Jika Anda telah membuat robot itu sendiri — yaitu membuatnya dari awal dengan menghubungkan motor dan sambungan mekanis — Anda mungkin harus memilih Opsi 1.
Jika Anda menggunakan robot industri yang berasal dari produsen robot, Opsi 2 hampir selalu akan lebih cepat dan mudah.
Metode Sulit:Membuat Pemecah Kinematika Terbalik
Jika Anda memilih untuk membuat pemecah kinematik terbalik Anda sendiri, bersiaplah untuk beberapa pemrograman serius!
Ada 2 pendekatan dasar untuk menghitung kinematika terbalik:
1. Solusi Kinematika Terbalik Analitik
Pemecah kinematik terbalik analitik akan dapat mengambil pose efektor akhir yang diinginkan dan (hampir) segera mengeluarkan posisi sambungan yang diperlukan.
Ini karena, “di balik kap mesin”, rantai kinematik robot telah direduksi menjadi ekspresi bentuk tertutup — untuk setiap pose efektor akhir, ada definisi matematis dari posisi sendi yang diperlukan.
Meskipun Anda dapat melakukan sendiri pekerjaan menghasilkan ekspresi bentuk tertutup (dengan tangan), ini biasanya tidak diperlukan. Saat ini perpustakaan IKFast membuat tugas ini jauh lebih mudah daripada sebelumnya.
2. Pemecah Kinematika Numerik/Iteratif
Tidak semua robot memiliki solusi kinematik terbalik analitis. Jika struktur kinematik robot rumit atau tidak biasa, satu-satunya pilihan adalah menggunakan pemecah kinematika terbalik numerik.
Selain itu, dalam solusi numerik, tidak ada ekspresi bentuk tertutup yang jelas. Sebagai gantinya, saat Anda memasukkan posisi efektor akhir yang diinginkan, algoritme iteratif bekerja menuju solusi untuk posisi sambungan yang diperlukan dengan memperlakukannya sebagai solusi pengoptimalan.
Pada setiap iterasi, algoritme memasukkan beberapa posisi sambungan ke dalam persamaan kinematik maju robot untuk mengetahui di mana ujung efektor berakhir. Pada iterasi berikutnya, ia menggunakan informasi ini untuk mengubah posisi gabungan lebih lanjut. Ini secara bertahap akan menggerakkan efektor akhir ke pose yang diinginkan.
Karena pendekatan iteratif ini, solusi kinematika terbalik numerik lebih lambat daripada solusi analitik.
Metode Mudah:Gunakan Pemecah Kinematika Terbalik yang Terbukti
Membuat pemecah kinematika terbalik Anda sendiri adalah latihan intelektual yang baik ketika Anda berada di universitas atau jika Anda sedang membangun robot Anda sendiri dari awal.
Namun, jika Anda hanya ingin menggunakan robot di lingkungan produksi, kecil kemungkinan Anda perlu membuat pemecah kinematika terbalik sendiri.
Jauh lebih mudah dan lebih cepat dengan hanya menggunakan solver yang sudah ada yang sudah dimasukkan ke dalam lingkungan pemrograman robot Anda.
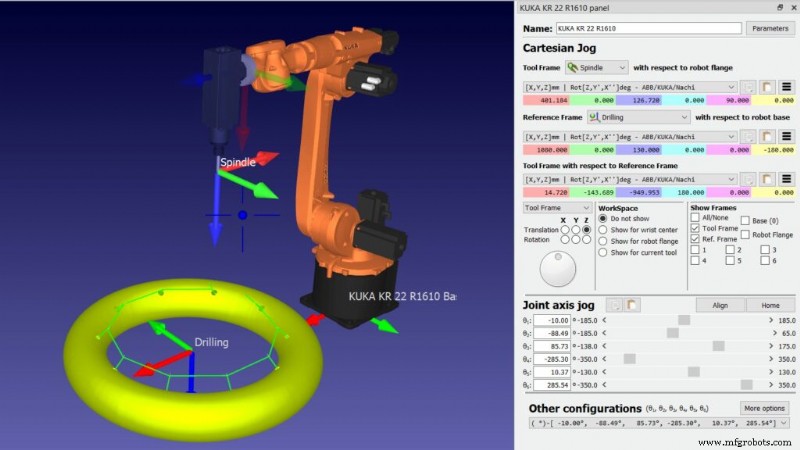
Semua robot di Perpustakaan Robot RoboDK dilengkapi dengan pemecah kinematik terbalik mereka sendiri. Ini memungkinkan Anda untuk langsung memprogramnya tanpa harus memikirkannya.
Sebagian besar pemecah kami adalah solusi analitik yang dibuat sebelumnya yang dikemas dengan file robot. Namun, beberapa robot yang lebih kompleks di perpustakaan memang menggunakan pemecah numerik. Bahkan dengan pemecah angka, pengurangan kecepatan kalkulasi tidak menjadi masalah dengan RoboDK karena Anda akan memprogram robot Anda secara offline sebelum mengirimkan program Anda ke robot itu sendiri.
Lagi pula, hanya buat pemecah kinematik terbalik Anda sendiri jika Anda benar-benar harus.
Jika tidak, waktu Anda akan jauh lebih baik dihabiskan untuk membuat program robot untuk tugas Anda dan membuatnya lebih cepat diproduksi.
Pertanyaan apa yang Anda miliki tentang kinematika terbalik dalam robotika? Beri tahu kami di komentar di bawah atau bergabunglah dalam diskusi di LinkedIn, Twitter, Facebook, Instagram, atau di Forum RoboDK.


