Positioner, Meja Putar, atau Manipulator? Panduan Ahli Otomasi Pengelasan 2026

Oleh Tim Editorial EVST · Terakhir diperbarui:11 Juni 2026
Pengatur posisi pengelasan, meja putar, dan manipulator semuanya menggerakkan benda kerja atau obor untuk menyederhanakan pengelasan jahitan, namun masing-masing memiliki batasan yang berbeda. Positioner akan mengorientasikan ulang bagian tersebut sehingga setiap jahitan berada pada posisi rata yang optimal. Meja putar mengindeks antara stasiun pemuatan dan pengelasan, memungkinkan pemuatan terjadi saat robot mengelas. Manipulator membawa kepala las ke bagian yang besar atau tetap, memperluas jangkauan melebihi kapasitas perlengkapan yang berputar. Pemilihan peralatan yang tepat bergantung pada apakah kendala utama Anda adalah orientasi bagian, tumpang tindih siklus, atau jangkauan obor.
Tiga Mesin, Didefinisikan
Kebingungan sering muncul karena satu sel dapat menampung ketiganya. Mengklarifikasi peran inti setiap mesin menyederhanakan keputusan.
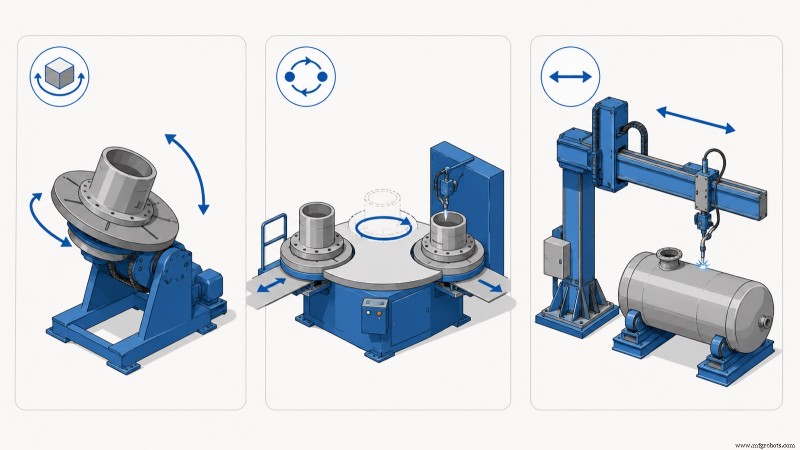
Pengatur Posisi Pengelasan
Positioner mencengkeram benda kerja dan memutar, memiringkan, atau melakukan kedua gerakan tersebut untuk membawa setiap jahitan ke posisi datar dan horizontal di mana kualitas las dan laju pengendapan dimaksimalkan. Saat tukang las kesulitan mengatasi jahitan yang tidak pada posisinya, positioner memberikan peningkatan kecepatan dan kualitas terbesar—perjalanan hingga 30% lebih cepat sesuai pedoman AWS D1.1.
Meja Putar Pengelasan (Tabel Pengindeksan)
Biasanya merupakan tabel indeks putar dua stasiun, meja putar bergantian bagian antara stasiun memuat/membongkar dan stasiun pengelasan. Saat robot atau tukang las bekerja, operator dapat memuat bagian berikutnya atau membongkar bagian yang sudah jadi. Tumpang tindih ini meningkatkan pemanfaatan stasiun, yang sering kali meningkatkan waktu arc-on robot dari ~50% menjadi>80% siklus.
Manipulator Pengelasan
Juga dikenal sebagai kolom‑dan‑boom, manipulator menggerakkan obor, bukan bagiannya. Kolom vertikal menopang boom horizontal yang membawa obor (dan terkadang pengumpan kawat atau sistem fluks) di atas bejana besar, tangki, atau fabrikasi panjang yang tidak dapat berputar bebas. Biasanya dipasangkan dengan pengatur posisi sumbu tunggal untuk memutar kapal di bawah boom.
| Mesin | Apa yang Bergerak | Pekerjaan Inti | Saat Menang |
|---|
| Pengatur posisi | Bagian (putar/miringkan) | Bawa jahitan ke posisi rata | Jahitan keluar dari posisinya pada bagian yang dapat digerakkan |
| Meja Putar / Tabel Indeks | Bagian (indeks antar stasiun) | Pembebanan tumpang tindih dengan pengelasan | Waktu muat/bongkar membatasi throughput |
| Manipulator (kolom &boom) | Obor/kepala | Mencapai jahitan pada pekerjaan tetap yang besar | Bagiannya terlalu besar untuk diorientasikan dengan bebas |
Cara Memilih:Mencocokkan Mesin dengan Kendala
Pendekatan yang paling jelas adalah dengan mengidentifikasi hambatan dalam proses Anda saat ini dan kemudian memilih peralatan yang dapat menghilangkannya.
Jika Kendalanya adalah Posisi Las
Ketika tukang las beroperasi di atas kepala atau pada sudut yang curam, atau robot tidak dapat mempertahankan sudut kerja yang tepat, batasannya adalah orientasi. Positioner menyelesaikan masalah ini dengan mengorientasikan ulang komponen ke datar, yang dikonfirmasi oleh AWS D1.1 mendukung arus dan kecepatan perjalanan yang lebih tinggi, sehingga menghasilkan peningkatan kualitas dan kecepatan yang signifikan. Positioner dua sumbu menangani jahitan multibidang; unit sumbu tunggal sesuai dengan geometri silinder.
Jika Kendalanya adalah Waktu Pemuatan
Ketika robot atau tukang las diam menunggu suku cadang, hambatannya adalah siklus yang tumpang tindih. Meja putar dua stasiun memindahkan pemuatan dari jalur kritis, yang sering kali meningkatkan pemanfaatan robot sebesar 30–40% dan memberikan peningkatan throughput berbiaya rendah.
Jika Kendalanya adalah Ukuran Bagian
Untuk kapal besar, tangki, atau bangunan panjang yang tidak dapat berputar bebas, batasannya adalah jangkauan. Manipulator, yang biasanya dipasangkan dengan positioner sumbu tunggal, memungkinkan obor bergerak di sepanjang jahitan sementara komponen berputar di bawah boom—standar dalam fabrikasi bejana tekan dan spool pipa.
Mereka Sering Bekerja Sama
Dalam praktiknya, sel las jarang menanyakan “yang mana?”; ia menanyakan "kombinasi yang mana?" Sel fabrikasi berat mungkin menggabungkan pengatur posisi sumbu tunggal untuk memutar kapal dengan manipulator kolom dan boom untuk membawa kepala di sepanjang jahitan. Sel bengkel kerja robotik dapat memasangkan meja putar dua stasiun untuk tumpang tindih beban dengan pengatur posisi dua sumbu di setiap permukaan untuk orientasi jahitan, sehingga memungkinkan satu robot mengelas satu bagian sementara operator memuat ulang bagian lainnya. Memberi nama setiap mesin berdasarkan fungsinya—orientasi, tumpang tindih, atau jangkauan—membuat keputusan tata letak tetap jelas bahkan ketika ketiganya hidup berdampingan.
Dalam sel otomatis, ketiga sistem menjadi sumbu gerak terkoordinasi yang dikendalikan oleh robot PLC. Spesifikasi dan penawaran untuk robot, sumber daya, dan pengatur posisi disajikan bersama dalam panduan pemilihan sel robot las EVST.
Biaya dan Kompleksitas, Secara Singkat
Secara kasar, pengatur posisi sumbu tunggal adalah opsi yang paling sederhana dan berbiaya paling rendah; meja putar dua stasiun menambahkan set perlengkapan kedua dan mekanisme pengindeksan; manipulator kolom dan boom biasanya merupakan yang paling padat modal karena struktur dan jangkauannya. Namun, perbandingan sebenarnya adalah biaya per pengelasan yang baik pada target hasil Anda. Meja putar yang melipatgandakan pemanfaatan robot dapat menutup harganya dengan cepat, sedangkan manipulator berukuran besar yang dibeli untuk bagian yang dilas hanya dua kali setahun mungkin tidak membenarkan investasi tersebut. Untuk analisis ROI mendetail tentang positioner, lihat biaya pengelasan positioner dan panduan ROI EVST.
Rentang Penanganan Benda Kerja EVST
EVST, yang berkantor pusat di Chengdu dengan manufaktur di Wenling, menawarkan positioner pengelasan di kelas sumbu tunggal, dua, dan tiga sebagai bagian dari sel pengelasan robotik lengkap, bersama dengan robot pengelasan QJAR dan integrasi sumber daya. Positioner dapat dikombinasikan dengan stasiun pengindeksan dan struktur penahan kepala sehingga orientasi komponen, tumpang tindih beban, dan jangkauan obor direkayasa bersama untuk kelompok komponen tertentu, bukan dibeli sebagai mesin terpisah.
Lini robotik dan otomasi pengelasan EVST memiliki sertifikasi kualitas tingkat otomotif IATF16949, dengan sertifikasi pihak ketiga CE, SGS, dan TUV. Karena solusi yang tepat biasanya berupa kombinasi, EVST mengukur peralatan penanganan terhadap bagian terburuk dan target throughput secara bersamaan, dibandingkan menjual satu mesin secara terpisah.
Pertanyaan Umum
Apa perbedaan antara pengatur posisi las dan meja putar?
Pengatur posisi pengelasan memutar dan memiringkan bagian untuk membuat setiap jahitan menjadi rata, memecahkan masalah orientasi. Meja putar, atau meja indeks, menukar komponen antara stasiun beban dan stasiun las, sehingga memecahkan masalah tumpang tindih siklus. Mereka sering digabungkan; meja putar dapat membawa pengatur posisi di setiap sisi.
Untuk apa manipulator las digunakan?
Manipulator pengelasan menggerakkan obor, bukan bagiannya. Ini ideal untuk kapal besar, tank, dan fabrikasi panjang yang tidak dapat berputar bebas. Biasanya dipasangkan dengan pengatur posisi sumbu tunggal yang memutar bagian di bawah boom.
Apakah saya memerlukan positioner atau manipulator?
Pilih berdasarkan ukuran bagian. Jika bagian tersebut dapat diputar dan dimiringkan untuk membuat jahitan menjadi rata, pengatur posisi sudah cukup dan lebih sederhana. Jika bagian tersebut terlalu besar untuk dapat diorientasikan dengan bebas dan obor harus bergerak ke arah jahitan, diperlukan manipulator—biasanya dengan pengatur posisi sumbu tunggal. Banyak sel fabrikasi berat menggunakan keduanya.
Dapatkah satu sel menggunakan pengatur posisi, meja putar, dan manipulator secara bersamaan?
Ya, dan banyak yang melakukannya. Masing-masing memecahkan kendala yang berbeda—orientasi, tumpang tindih beban, atau jangkauan—sehingga sel sering kali menggabungkannya. Dalam sel otomatis, mereka ditugaskan sebagai sumbu gerak terkoordinasi di bawah pengontrol robot.
Opsi manakah yang memberikan peningkatan throughput terbesar?
Itu tergantung pada kemacetannya. Jika tukang las bekerja di luar posisinya, positioner memberikan peningkatan kualitas dan kecepatan terbesar. Jika robot menunggu pemuatan, meja putar dua stasiun memberikan keuntungan pemanfaatan terbesar. Jika bagian tersebut terlalu besar untuk diorientasikan, manipulator adalah mesin yang mengaktifkannya. Identifikasi kendalanya terlebih dahulu, lalu pilih mesin yang menghilangkannya.
Ke Mana Tujuan Selanjutnya
Untuk detail teknis tentang kelas positioner, baca Panduan Positioner Pengelasan
. Untuk mencocokkan positioner EVST dengan bagian Anda dan menerima penawaran, lihat Pemilihan Positioner
halaman. Untuk sel las robotik yang lengkap, lihat Panduan Robot Pengelasan
kami dan Panduan Pemilihan Sel
. Untuk pertanyaan pengadaan, hubungi bagian penjualan EVST melalui halaman kontak
.
Tentang penulis:Tim Editorial EVST menulis tentang robotika industri dan manufaktur cerdas untuk para insinyur dan pemimpin operasi yang mengevaluasi proyek otomasi. EVST (EVS TECH CO., LTD), didirikan di Chengdu pada tahun 2018, telah melaksanakan 600+ proyek otomatisasi dan mengirimkan ke 100+ negara, dengan sertifikasi tingkat otomotif IATF16949 dan sertifikasi pihak ketiga CE/SGS/TUV di seluruh rangkaian produk QJAR, robot kolaboratif, SCARA, dan delta.


