Cobots 2026:Cara Kerja Robot Kolaboratif dan Mengapa Penting

Oleh Tim Editorial EVST · Terakhir diperbarui:10 Juni 2026
Robot kolaboratif, atau cobot, adalah lengan industri ringan yang dirancang untuk beroperasi di samping manusia tanpa memerlukan pagar pengaman. Hal ini dicapai melalui pembatasan daya dan gaya:sensor torsi di setiap sendi merasakan kontak dan segera menghentikan atau menarik kembali lengan sebelum tabrakan dapat menyebabkan cedera. ISO/TS 15066 menguraikan empat mode kolaborasi yang menentukan kedekatan yang diperbolehkan antara manusia dan robot. Pada tahun 2026, muatan cobot biasanya berkisar antara 3 kg hingga 30 kg, dengan jangkauan sekitar 600 mm hingga 1.800 mm.
Apa yang Membuat Cobot Berbeda dari Robot Konvensional
Istilah “kolaboratif” mengacu pada kemampuan keselamatan, bukan kelas mekanis tertentu. Cobot tetap berupa lengan artikulasi 6 sumbu yang dilengkapi dengan motor servo, kotak roda gigi, dan encoder di setiap sambungan. Yang membedakannya adalah penginderaan dan kontrol tambahan yang memungkinkannya berbagi ruang kerja dengan aman, dipadukan dengan desain yang meminimalkan risiko cedera:tepi membulat, massa bergerak rendah, tidak ada titik jepit, dan batas kecepatan.
Robot industri tradisional dibuat untuk kecepatan, muatan, dan kemampuan pengulangan dalam sel yang dilindungi, dengan asumsi tidak ada kehadiran manusia di dalam ruang kerja. Cobot memperdagangkan kecepatan puncak dan muatan untuk kemampuan beroperasi di ruang bersama, yang pada gilirannya mengubah keekonomian penerapan:sel cobot tidak memerlukan pagar, tirai tipis, dan ruang overhead yang dibutuhkan sel berpagar. Penghematan biaya ini merupakan keuntungan utama bagi produsen skala kecil dan menengah. Untuk panduan terstruktur mengenai jenis cobot dan kriteria pemilihan, lihat panduan lengkap kami mengenai jenis, pemilihan, dan penerapan cobot, yang melengkapi artikel ini dengan pembahasan lebih dalam tentang mekanisme keselamatan.
Menurut laporan International Federation of Robotics 2025 World Robotics, robot kolaboratif tetap menjadi segmen pasar robot industri dengan pertumbuhan tercepat berdasarkan tingkat pertumbuhan unit, meskipun robot tersebut masih mewakili minoritas dari total instalasi. Pertumbuhan terkonsentrasi pada perakitan elektronik, perawatan mesin, dan pengemasan—area yang bobot suku cadangnya rendah dan jarak antara manusia dengan robot sangat berguna secara operasional.
Cara Kerja Cobot:Mekanisme Keamanan
Teknologi inti yang memungkinkan cobot adalah cara mereka merasakan dan membatasi kekuatan kontak. Pada tahun 2026, tiga pendekatan mendominasi, dan sebagian besar cobot produksi menggabungkan lebih dari satu.
Penginderaan Torsi Gabungan
Setiap sambungan berisi sensor torsi—atau pengontrol menyimpulkan torsi dari arus motor. Selama gerakan normal, pengontrol mengetahui profil torsi yang diharapkan untuk jalur yang diprogram pada kecepatan yang diprogram. Jika torsi yang diukur melebihi ambang batas, pengontrol menafsirkannya sebagai gaya eksternal yang tidak terduga, memicu penghentian pelindung, dan membawa lengan ke posisi aman. Waktu reaksi dari kontak hingga berhenti berada pada urutan milidetik, menjaga gaya kontak tetap di bawah ambang batas cedera.
Pembatasan Daya dan Gaya (PFL)
PFL adalah metode kolaboratif yang paling umum. Robot ini dirancang dan dikonfigurasi sedemikian rupa sehingga, bahkan dalam kasus terburuk sekalipun, gaya dan tekanan yang ditransmisikan tetap berada di bawah batas biomekanik yang ditentukan dalam Lampiran A ISO/TS 15066 untuk wilayah tubuh yang relevan. Hal ini dicapai melalui massa bergerak yang rendah, batas kecepatan, geometri bulat, dan penghentian sensor torsi yang dijelaskan di atas. PFL memungkinkan banyak cobot berjalan tanpa pagar atau tirai tipis karena robot itu sendiri bertindak sebagai sistem keselamatan.
Pemantauan Kecepatan dan Pemisahan
Sebagai alternatif atau pelengkap, sensor keselamatan eksternal—seperti pemindai laser, kamera 3D, atau matras pengaman—melacak posisi operator. Robot berjalan dengan kecepatan penuh saat tidak ada orang di dekatnya, melambat saat ada orang yang mendekat, dan berhenti jika jarak pemisahan pelindung dilanggar. Hal ini memungkinkan robot yang lebih cepat dan lebih berat untuk berperilaku kolaboratif tanpa mengorbankan kecepatan produktif saat ruang kerja kosong.
Dalam praktiknya, penerapan yang paling bersih menggabungkan metode:PFL sebagai dasar keselamatan, dengan pemantauan kecepatan dan pemisahan untuk memulihkan throughput ketika tidak ada operator yang hadir. Pengamatan industri dari penerapan jalur perakitan menunjukkan bahwa cobot yang dikonfigurasi murni untuk kecepatan PFL dalam kasus terburuk dapat kehilangan 40% hingga 60% potensi throughputnya dibandingkan dengan cobot yang sama yang diizinkan berjalan cepat saat ruang kerja kosong—sehingga konfigurasi hibrid kini menjadi default pada jalur bervolume lebih tinggi.
Empat Mode Kolaborasi Berdasarkan ISO/TS 15066
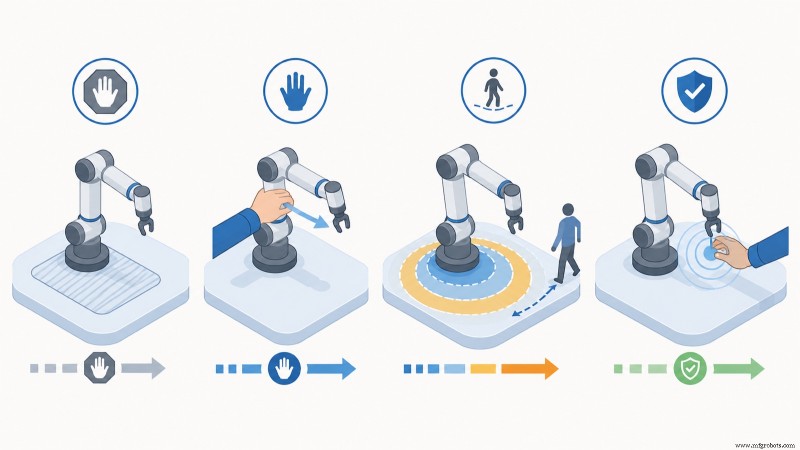
ISO/TS 15066:2016 melengkapi ISO10218 untuk operasi kolaboratif dan mendefinisikan empat metode kolaborasi yang berbeda. Satu aplikasi dapat menggunakan satu atau menggabungkan beberapa. Memahami mode mana yang dibutuhkan aplikasi adalah langkah pertama dalam menentukan sel cobot yang aman.
| Mode kolaborasi | Cara kerjanya | Interaksi manusia-robot | Aplikasi biasa |
| Perhentian terpantau dengan tingkat keamanan | Robot berhenti ketika seseorang memasuki ruang bersama; dilanjutkan ketika mereka pergi | Tidak ada gerakan saat manusia berada di zona kolaboratif | Memuat/membongkar sel robot secara manual, tugas ruang bersama sesekali |
| Panduan tangan | Operator secara fisik menggerakkan lengan menggunakan perangkat pemandu tangan; robot mematuhi gaya yang diterapkan | Panduan fisik langsung, gerakan robot digerakkan oleh operator | Jalur pengajaran, pengangkatan berbantuan, pemosisian komponen bervolume rendah |
| Pemantauan kecepatan dan pemisahan | Kecepatan robot berskala dengan jarak operator, diukur dengan sensor keselamatan | Hidup berdampingan dengan pengurangan kecepatan dinamis, berhenti penuh pada jarak minimum | Sel campuran tempat manusia dan robot bekerja dalam jarak bergantian |
| Pembatasan daya dan gaya | Gaya dan tekanan kontak dijaga di bawah batas biomekanik berdasarkan desain dan kontrol | Kontak langsung diperbolehkan; robot berhenti karena kekuatan yang tidak terduga | Perakitan tugas bersama, perawatan mesin, pengemasan di samping operator |
ISO/TS 15066 mengatur batasan biomekanik berdasarkan wilayah tubuh:batasan pada wajah dan tengkorak jauh lebih ketat dibandingkan pada lengan atas atau tangan, yang mencerminkan tingkat keparahan potensi cedera. Penilaian risiko yang benar memetakan bagian jalur robot yang memungkinkan terjadi kontak dengan bagian tubuh yang dapat dihubungi, kemudian memverifikasi bahwa gaya dan tekanan tetap berada di bawah batas yang relevan. Inilah sebabnya mengapa cobot yang “aman” untuk satu aplikasi tidak otomatis aman untuk aplikasi lain:mengubah alat, bagian, atau tata letak akan mengubah skenario kontak.
Anatomi Cobot:Komponen dan Spesifikasi
Lembar spesifikasi cobot menyerupai robot industri kecil, dengan beberapa tambahan khusus kolaborasi. Parameter yang paling penting selama pemilihan adalah:
- Muatan — massa maksimum pada flensa perkakas, termasuk gripper atau perkakas. Cluster muatan cobot tahun 2026 pada kelas 3, 5, 6, 10, 12, 16, 18, 20, dan hingga kelas 30kg.
- Jangkauan — radius selubung kerja, biasanya 500 mm hingga 1.800 mm. Jangkauan dan muatan saling menguntungkan satu sama lain dalam rangkaian produk.
- Keterulangan — seberapa tepat lengan kembali ke titik yang ditentukan, biasanya ±0,02mm hingga ±0,1mm tergantung ukurannya. Pengulangan mengukur konsistensi, yang merupakan hal yang dibutuhkan sebagian besar tugas perakitan dan pemeliharaan.
- Derajat kebebasan — enam adalah standar untuk tugas 3D umum; cobot tujuh sumbu menambah fleksibilitas jangkauan di ruang yang berantakan.
- Flensa alat dan I/O — antarmuka pemasangan dan sambungan listrik/pneumatik untuk gripper dan sensor, sering kali disalurkan melalui pergelangan tangan.
- Fungsi dengan tingkat keamanan — zona keselamatan yang dapat dikonfigurasi, batas kecepatan, batas gaya, dan tingkat keselamatan berhenti yang dipantau, semuanya bersertifikat tingkat keselamatan fungsional ISO10218‑1 dan IEC61508/62061.
Kemampuan kolaborasi terutama terdapat pada pengontrol dan penginderaan bersama, bukan pada satu komponen yang terlihat. Itulah sebabnya dua lengan dengan muatan dan jangkauan yang sama dapat berbeda secara signifikan dalam hal keselamatan dan kecepatan:perbedaannya terletak pada pengontrol keselamatan, resolusi sensor, dan penyetelan deteksi tabrakan.
Di Mana Cobot Diterapkan
Cobot berkembang pesat dalam aplikasi yang bobot komponennya sederhana, kedekatan dengan manusia sangat berguna, dan fleksibilitas untuk memindahkan lengan lebih penting daripada waktu siklus puncak. Kelompok aplikasi yang paling umum pada tahun 2026 meliputi:
Perawatan Mesin
Bongkar muat mesin CNC, mesin cetak injeksi, dan rem tekan. Cobot mengambil bagian yang kosong, memuat mesin, menunggu siklus, dan membongkar bagian yang sudah jadi. Karena operator masih dapat mengakses mesin ketika cobot dihentikan, sel tetap fleksibel. Perawatan mesin adalah aplikasi cobot terbesar berdasarkan basis terpasang.
Perakitan dan Pengeboran
Tugas pengikatan, penyisipan, dan perakitan pengambilan tempat yang berulang, sering kali dilakukan bersamaan dengan manusia yang menangani langkah-langkah yang membutuhkan banyak pertimbangan. Cobot yang dikontrol gaya unggul dalam tugas penyisipan (press-fit, snap-fit) dengan profil gaya terprogram yang mencegah kerusakan komponen.
Pengemasan dan Pembuatan Palet
Pengemasan casing akhir dan pembuatan palet ringan. Pembuat palet Cobot menangani kotak hingga muatan lengan, membangun tumpukan yang stabil di atas palet. Untuk kasus yang lebih berat, muatan menjadi faktor pembatas dan robot pembuat palet konvensional mengambil alih.
Inspeksi Kualitas dan Otomatisasi Lab
Cobot yang dilengkapi kamera atau sensor melakukan pemeriksaan berulang, dan di laboratorium mereka menangani sampel, pipet, dan perawatan instrumen. Tata letak tanpa pagar cocok untuk lingkungan tempat orang dan peralatan berbagi bangku yang sempit.
Pengelasan dan Penyelesaian Permukaan
Pengelasan cobot telah berkembang pesat di bengkel kerja, di mana jahitan pendek dan volume rendah tidak memerlukan sel pengelasan berpagar. Cobot juga menangani pengamplasan, pemolesan, dan deburring dengan kontrol gaya. Untuk pengelasan volume tinggi yang berkelanjutan pada komponen berat, lengan 6 sumbu berpagar tetap merupakan alat yang tepat, seperti yang dibahas dalam panduan robot pengelasan untuk industri berat.
Lingkungan Berbahaya dan Ekstrem
Cobot tahan ledakan memperluas operasi kolaboratif ke atmosfer dengan gas yang mudah terbakar, seperti fasilitas kimia, cat, dan energi. Ini memerlukan peringkat enklosur bersertifikat, bukan housing cobot standar. Lihat panduan khusus kami mengenai cobot tahan ledakan untuk lingkungan berbahaya untuk mengetahui detail sertifikasinya.
Cobot vs Robot Industri:Saat Masing-masing Menang
Pilihan antara cobot dan robot industri konvensional merupakan keputusan penerapan, bukan pertanyaan teknologi mana yang lebih maju. Matriks di bawah ini menggambarkan trade-off.
| Faktor | Robot kolaboratif | Robot industri konvensional |
| Muatan | Biasanya 3 hingga 30kg | 5 hingga 800+kg |
| Kecepatan | Terbatas untuk keamanan; lebih cepat dengan pemantauan pemisahan | Tinggi, dioptimalkan untuk waktu siklus |
| Pelindung keamanan | Seringkali tidak memiliki pagar setelah penilaian risiko | Sel berpagar, tirai tipis, saling bertautan |
| Ruang lantai | Ringkas, tanpa tapak pelindung | Lebih besar, dilengkapi perimeter keselamatan |
| Penempatan kembali | Cepat; lengan dapat dipindahkan antar tugas | Lebih lambat; sel bersifat semipermanen |
| Cocok untuk | Muatan rendah, campuran tinggi, tugas yang berdekatan dengan manusia | Volume tinggi, muatan tinggi, siklus berkelanjutan |
Untuk kerangka keputusan lengkap, lihat analisis pendamping kami, cobot vs robot industri:mana yang harus dipilih pabrik Anda pada tahun 2026. Singkatnya, cobot menang ketika muatan rendah, tata letak mendapat manfaat dari berbagi ruang dengan orang, dan garis sering berubah; robot konvensional menang ketika volume dan muatannya tinggi dan selnya dapat didedikasikan.
Menerapkan Cobot dengan Aman:Penilaian Risiko
Kesalahpahaman yang umum terjadi adalah bahwa cobot “aman sejak dikeluarkan dari kotaknya”. Lengan ini dibuat agar bersifat kolaboratif, namun aplikasinya secara keseluruhan—lengan plus alat, komponen, tata letak, dan tugas—harus dinilai dan disertifikasi. Berdasarkan ISO10218‑2 dan ISO/TS15066, integrator (seringkali pengguna akhir) bertanggung jawab atas penilaian risiko aplikasi kolaboratif yang lengkap.
- Identifikasi bahaya. Petakan setiap titik di jalur robot yang memungkinkan terjadinya kontak dengan seseorang, ditambah bahaya alat (pegangan tajam, efektor ujung panas), dan bagian yang sedang ditangani.
- Klasifikasikan mode kolaborasi. Putuskan yang mana dari empat mode ISO/TS15066 yang digunakan tugas, dan fase siklusnya yang mana.
- Verifikasi batas biomekanik. Untuk pengoperasian dengan daya dan gaya terbatas, pastikan bahwa gaya kontak dan tekanan untuk setiap kemungkinan kontak tetap berada di bawah batas Lampiran A untuk wilayah tubuh tersebut, dengan perhitungan atau pengukuran dengan perangkat uji tekanan gaya.
- Konfigurasi fungsi keselamatan. Tetapkan batas kecepatan, kekuatan, dan zona di pengontrol keselamatan, dan validasinya.
- Dokumentasi dan validasi. Catat penilaian, validasi sel bawaan, dan nilai ulang setiap kali alat, komponen, atau tata letak berubah.
Dalam praktiknya, ketika insinyur aplikasi EVST menugaskan sel kolaboratif di lokasi, temuan paling sering selama validasi adalah bahwa gripper atau bagian yang tajam menciptakan tekanan kontak di atas batas AnnexA meskipun lengan itu sendiri berada dalam batas gaya. Perbaikannya biasanya berupa desain ulang gripper, pelindung tepi, atau pengurangan kecepatan pada segmen jalur yang terpengaruh—bukan robot yang berbeda. Ini adalah langkah yang paling sering dianggap remeh oleh pembeli ketika mereka menganggap cobot menghilangkan kebutuhan akan rekayasa keselamatan.
Rangkaian Robot Kolaboratif EVST
EVST, yang berkantor pusat di Chengdu dengan manufaktur di Wenling, telah mengirimkan otomatisasi ke lebih dari 100 negara dalam tujuh tahun. Jajaran robot kolaboratifnya mencakup muatan mulai dari kelas 3kg hingga 30kg, dengan model yang dipublikasikan termasuk lengan 3kg/620mm, lengan 6kg/917mm, lengan 12kg/1.300mm, dan lengan 18kg/900mm. EVST juga memproduksi robot kolaboratif tahan ledakan untuk atmosfer berbahaya dan lini cobot layanan katering, bersama dengan robot industri konvensional QJAR, SCARA, dan rangkaian produk delta.
Lini produksi EVST memiliki sertifikasi kualitas tingkat otomotif IATF16949, dan produknya memiliki sertifikasi pihak ketiga CE, SGS, dan TUV. Cobot tahan ledakan dinilai dapat digunakan di atmosfer yang mudah terbakar, memperluas operasi kolaboratif ke lingkungan yang tidak dapat dimasuki oleh rumah cobot standar. Perusahaan ini juga memegang satu paten penemuan yang diberikan (CNZL202011601091.6), empat paten penemuan dalam pemeriksaan substantif, dan dua hak cipta perangkat lunak, didukung oleh jaringan teknik lapangan yang mencakup lebih dari 100 negara untuk pelaksanaan di lokasi dan dukungan penilaian risiko.
Pertanyaan Umum
Apa itu robot kolaboratif secara sederhana?
Robot kolaboratif adalah lengan robot yang dibuat untuk bekerja dengan aman di samping manusia tanpa pagar pengaman. Alat ini menggunakan sensor torsi pada sambungannya untuk mendeteksi kontak dan berhenti dengan cepat, serta dirancang dengan massa rendah, kecepatan terbatas, dan permukaan bulat sehingga setiap kontak tetap berada di bawah batas gaya dan tekanan yang dapat menyebabkan cedera, sebagaimana ditentukan dalam ISO/TS15066.
Apakah cobot benar-benar tidak membutuhkan pagar pengaman?
Seringkali, tapi tidak otomatis. Apakah pagar diperlukan tergantung pada penilaian risiko aplikasi secara keseluruhan, lengan ditambah alatnya, bagiannya, dan tugasnya. Banyak aplikasi dengan muatan rendah dan kecepatan rendah berjalan tanpa pagar setelah penilaian. Namun alat yang tajam, bagian yang berat atau bertepi tajam, atau persyaratan kecepatan tinggi dapat memerlukan perlindungan tambahan atau pemantauan kecepatan dan pemisahan. Cobot memungkinkan tata letak tanpa pagar; penilaian risiko memastikan apakah hal tersebut diperbolehkan.
Muatan dan jangkauan apa yang saya perlukan untuk cobot?
Tambahkan bobot komponen dan bobot gripper ke ukuran muatan, dan sisakan sekitar 20% hingga 30% margin. Untuk perawatan mesin pada bagian-bagian kecil, lengan dengan berat 5kg hingga 10kg adalah hal yang umum; untuk pembuatan palet atau penanganan yang lebih berat, 16kg hingga 30kg. Jangkauan harus mencakup seluruh lingkup kerja suatu tugas, biasanya 600 mm hingga 1.300 mm untuk pekerjaan benchtop dan pemeliharaan mesin, dan lebih panjang untuk pembuatan palet.
Apa perbedaan antara ISO10218 dan ISO/TS15066?
ISO10218 (bagian 1 dan 2) adalah standar keselamatan inti untuk robot industri dan integrasinya. ISO/TS15066 adalah spesifikasi teknis yang melengkapinya secara khusus untuk operasi kolaboratif, menambahkan empat mode kolaborasi serta batas kekuatan dan tekanan biomekanik dalam Lampiran A. Aplikasi kolaboratif harus memenuhi keduanya. Untuk perincian yang berfokus pada pembeli, lihat panduan kami mengenai standar keamanan cobot di situs produk EVST.
Seberapa cepat cobot bisa bergerak?
Dalam mode terbatas daya dan gaya, kecepatan cobot dibatasi sehingga kontak terburuk tetap berada dalam batas biomekanik, seringkali jauh di bawah robot konvensional. Dengan pemantauan kecepatan dan pemisahan, lengan yang sama dapat berjalan mendekati maksimum mekanisnya ketika tidak ada operator yang berada di zona perlindungan, kemudian melambat atau berhenti saat ada orang yang mendekat. Konfigurasi hibrid memulihkan sebagian besar throughput yang hilang sekaligus menjaga keamanan kolaboratif.
Ke Mana Tujuan Selanjutnya
Untuk mencocokkan cobot tertentu dengan persyaratan muatan dan jangkauan dengan jalur menuju penawaran, lihat panduan situs produk EVST untuk pemilihan muatan robot kolaboratif dari 3kg hingga 30kg. Untuk detail standar keselamatan yang dibutuhkan pembeli sebelum menentukan sel tanpa pagar, lihat penjelasan standar keselamatan cobot untuk pembeli. Untuk keputusan membangun atau membeli yang lebih luas, baca cobot vs robot industri, dan untuk memperkirakan keuntungan, kalkulator ROI cobot kami untuk manufaktur UKM. Untuk pertanyaan pengadaan, penjualan EVST dapat dihubungi melalui halaman kontak.
Tentang penulis:Tim Editorial EVST menulis tentang robotika industri dan manufaktur cerdas untuk para insinyur dan pemimpin operasi yang mengevaluasi proyek otomasi. EVST (EVSTECHCO.,LTD), didirikan di Chengdu pada tahun 2018, telah melaksanakan 600+ proyek otomatisasi dan dikirimkan ke 100+ negara, dengan sertifikasi tingkat otomotif IATF16949 dan sertifikasi pihak ketiga CE/SGS/TUV di seluruh rangkaian produk QJAR, robot kolaboratif, SCARA, dan delta.


