Perusahaan chip otomotif selalu membicarakan tentang sistem pada chip yang dirancang untuk Sistem Bantuan Mengemudi Tingkat Lanjut.
Namun, bagaimana kita semua — reporter, analis, dan yang paling penting, pembuat mobil — dapat membedakan satu SoC ADAS dari yang lain?
Kebenarannya adalah, kita tidak bisa. Tidak adanya alat dan tolok ukur ilmiah menyisakan sedikit pilihan selain mengambil kata vendor untuk itu. Atau, kami mengandalkan ukuran yang tidak sempurna seperti triliun operasi per detik (TOPS) untuk membandingkan EyeQ5 Intel/Mobileye dengan Xavier Nvidia, yang mungkin sangat mengecewakan.
Sekitar sebulan yang lalu, EEMBC, sebuah konsorsium industri yang mengembangkan tolok ukur untuk perangkat keras yang disematkan, meluncurkan “ADASMark”, rangkaian tolok ukur mengemudi otonom, yang sekarang tersedia untuk lisensi.
Rangkaian alat baru, menurut EEMBC, dirancang untuk membantu pembuat mobil tingkat dan mengoptimalkan penggunaan sumber daya komputasi mereka mulai dari CPU hingga GPU dan akselerator perangkat keras saat mereka merancang sistem ADAS mereka sendiri.
Mike Demler, analis senior di The Linley Group, menyambut ADASMark, dengan mengatakan, "Senang melihat ini bukan hanya metrik kinerja abstrak, tetapi mereka menggunakan beban kerja nyata." Demler mengatakan bahwa partisipasi dari AU-Zone Technologies — sebuah perusahaan jasa desain teknik yang berbasis di Calgary — dan vendor chip seperti NXP Semiconductors dan Texas Instruments membuat pengujian EEMBC lebih bermakna daripada, misalnya, DeepBench generik Baidu.
Ini semua tentang kerangka kerja EE Times bertemu dengan Peter Torelli, presiden dan CTO EEMBC, untuk menanyakan tentang tantangan yang dihadapi pembuat mobil saat mereka mulai merancang kendaraan yang sangat otomatis.
Tidak diragukan lagi bahwa semakin banyak sistem tertanam otomotif yang menggunakan banyak inti. Namun, seperti yang ditunjukkan Torelli, “masih ada sedikit kerangka kerja yang dapat memanfaatkan sumber daya komputasi asimetris mereka.” Dia menambahkan, “Tanpa kerangka kerja, setiap contoh dari benchmark yang dikompilasi akan sangat bervariasi tergantung pada perangkat kerasnya, dan membuat perbandingan antar platform menjadi sangat sulit. Kerangka kerja memfasilitasi portabilitas dengan sedikit modifikasi.”
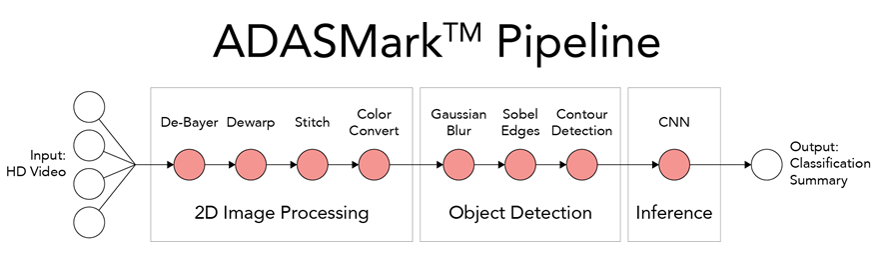
Pertimbangkan Pipa ADASMark di bawah ini, katanya.
(Sumber:EEMBC)
Torrelli berkata:“Kinerja dasar dari sistem ini mungkin menggunakan CPU yang sama untuk semua tahapan dalam pipeline. Tetapi bagaimana jika pengembang ingin menukar chip neural-net khusus untuk tahap terakhir? Atau mungkin menggunakan DSP khusus untuk konversi ruang warna?”
Di sinilah kerangka kerja masuk.
“Tanpa kerangka kerja, pengembang perlu memasukkan kode ke antarmuka antara benchmark dan perangkat komputasi (NN, DSP atau GPU). Ini memakan waktu, rumit, dan rawan kesalahan, dan dapat dengan mudah mengganggu maksud dari tolok ukur (atau merusak hasil).”
Kerangka kerja membuat penargetan ulang perangkat komputasi ini menjadi lebih mudah, jelas Torrelli.
EEMBC awalnya memeriksa opsi yang tersedia di pasar saat ini. “AMP dan OpenAMP mencoba untuk mengatasi hal ini, tetapi mereka adalah spesifikasi untuk multicore simetris, dan mereka tidak benar-benar membantu kami di sini,” kata Torrelli. “Kami juga melihat OpenCV dan OpenVX, tetapi dukungan tidak merata di antara lanskap produsen.”
Begitulah cara EEMBC mengembangkan ADASMark berdasarkan kerangka kerja baru dengan beban kerja yang lebih relevan.
Fokus pada saluran pencitraan Fitur utama ADASMark Benchmark Suite, menurut EEMBC, “termasuk OpenCL 1.2 Embedded Profile API untuk memastikan konsistensi antara implementasi komputasi; alur aplikasi yang dibuat oleh serangkaian tolok ukur mikro yang mengukur dan melaporkan kinerja untuk SoC yang menangani visi komputer, mengemudi otonom, dan tugas pencitraan seluler; dan mesin inferensi CNN pengenalan rambu lalu lintas yang dibuat oleh Au-Zone Technologies.”
Karena ADAS memerlukan deteksi objek intensif komputasi dan kemampuan klasifikasi visual, fokus ADASMark adalah pada jalur pencitraan. Tampaknya menggunakan “beban kerja dunia nyata yang mewakili aplikasi yang sangat paralel, seperti penggabungan tampilan surround, deteksi kontur, dan klasifikasi rambu lalu lintas convolutional neural-net (CNN),” jelas EEMBC.