

Teknologi Industri

Manufaktur industri
Motor listrik merupakan komponen penting dalam mengubah energi listrik menjadi energi mekanik. Namun, meskipun semua motor menjalankan fungsi yang sama, memilih yang tepat akan berguna dalam menghasilkan torsi maksimum. Nah, pada artikel kali ini kita akan membedakan antara motor stepper vs motor dc. Selain itu, kami akan mengidentifikasi sifat kritis motor servo.
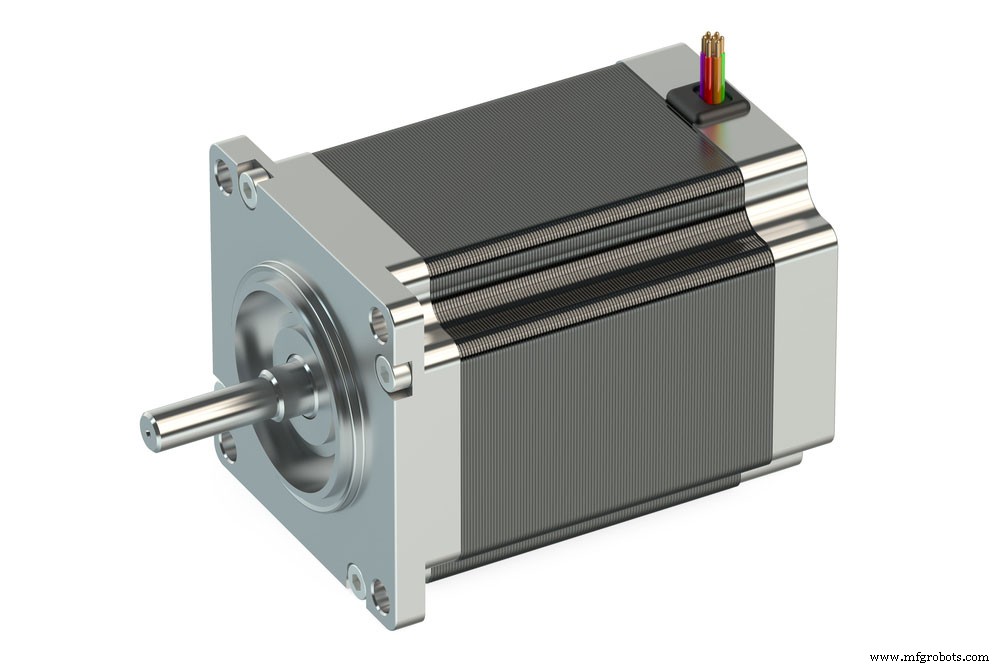
Gbr 1:Motor Stepper
Terutama, ini adalah motor DC tanpa sikat yang berputar dalam langkah-langkah terpisah.
Selain itu, dengan stepping yang dikendalikan komputer, dimungkinkan untuk mewujudkan kontrol kecepatan dan pemosisian yang sangat presisi. Oleh karena itu, motor stepper populer dalam penggunaan kontrol gerak presisi.
Ini fitur beberapa elektromagnet bergigi yang mengelilingi gigi pusat. Pengaturan ini berguna dalam menentukan posisi. Juga, motor stepper magnet permanen menggunakan daya arus searah. Meskipun demikian, ia tidak memiliki sikat dan komutator mekanis yang identik dengan motor DC. Oleh karena itu, ini adalah motor DC tanpa sikat.
Motor memiliki sistem kontrol yang bertanggung jawab untuk mengirimkan pulsa listrik ke pengemudi. Selanjutnya, pengemudi menguraikan impuls. Pada gilirannya, ia mentransmisikan tegangan proporsional kembali ke motor.
Selanjutnya, motor akan berputar dalam peningkatan sudut tetap. Di sinilah ia mendapatkan nama motor stepper. Juga, perhatikan bahwa arus bolak-balik mengontrol polaritas kumparan.
Keuntungan dari motor stepper antara lain sebagai berikut:

Gbr 2:Printer 3D Logam
Keterbatasan mendasar mereka termasuk

Gbr 3:Ilustrasi 3D Motor Servo
Itu milik jenis motor DC. Meskipun demikian, motor sinkron ini tidak berjalan terus menerus untuk waktu yang lama.
Terutama, motor ini bergantung pada sistem umpan balik untuk merasakan perbedaan antara kecepatan yang sebenarnya dan yang diinginkan. Dengan demikian, umpan balik memfasilitasi penyesuaian output dalam mengoreksi penyimpangan dari posisi yang diinginkan. Ini berguna dalam meningkatkan penentuan posisi yang akurat.
Ada dua jenis servo, yaitu:
Mereka dapat terus berputar baik searah jarum jam atau berlawanan arah jarum jam. Juga, mereka dapat bergerak pada rentang kecepatan yang berbeda seperti yang dipandu oleh sinyal perintah. Dengan demikian, mereka berguna untuk aplikasi yang lebih luas daripada motor posisional.
Mereka berguna dalam proyek skala kecil untuk mencapai pemosisian presisi sedang. Juga, mereka berputar pada sudut 180 derajat dan tidak membantu dalam rotasi terus menerus dan kontrol kecepatan.

Gbr 4:Motor Servo
Desain motor interior menampilkan pengaturan unik dari roda gigi yang berguna dalam mengurangi kecepatan tinggi motor internal. Secara bersamaan, ada peningkatan yang signifikan dalam output torsi.
Oleh karena itu, desain gigi servo dan kecepatan putaran sangat penting dalam menghasilkan torsi tinggi. Yang juga perlu diperhatikan adalah bahwa servo memiliki mikrokontroler yang membantu dalam memperbaiki sinyal kesalahan. Sinyal kontrol ini membantu menggerakkan rotor ke posisi akhir.

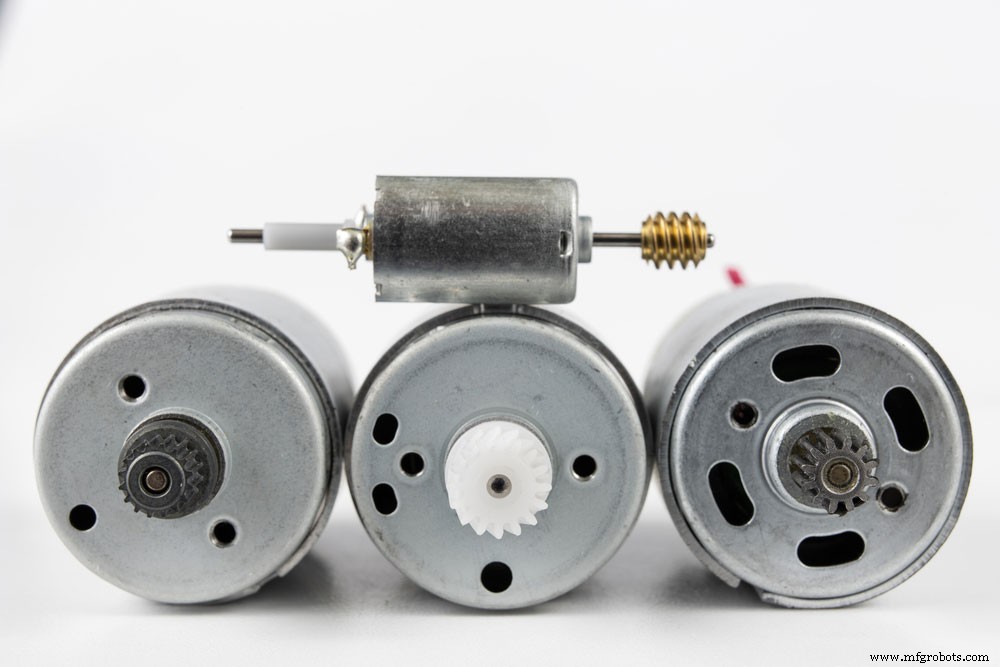
Gbr 5:Banyak Motor DC
Mereka adalah perangkat dengan kumparan elektromagnetik dan konduktor yang interaksinya mengubah energi listrik menjadi energi mekanik. Dua jenis motor DC yang umum termasuk motor brushless dan motor brushed. Juga, ada berbagai ukuran motor DC.
Yang perlu diperhatikan, nama brushed berasal dari dua brush metalik stasioner yang memberikan arus belitan ke motor. Komponen utama lainnya termasuk stator statis dan jangkar berputar
Gbr 6:Motor DC
Stator memberikan medan magnet yang berputar, yang mendorong rotasi dinamo. Juga, sepasang magnet berguna dalam membungkus kumparan elektromagnetik melalui sekitar kumparan. Jadi, ketika arus belitan di kawat melewati medan magnet, itu menginduksi gaya. Pada gilirannya, ini memulai rotasi kumparan.
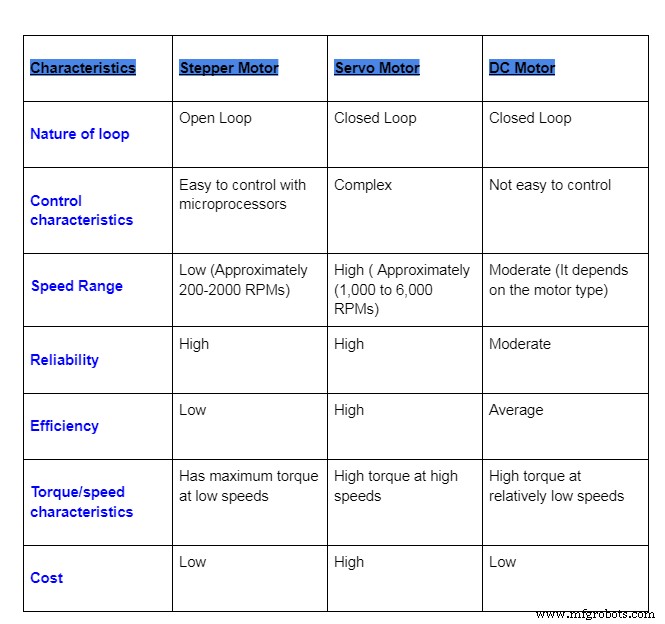
Singkatnya, ketiga motor ini cocok untuk fungsi yang berbeda seperti yang telah kami uraikan. Sekarang Anda memiliki semua perbedaan utama antara ketiga jenis motor. Namun, jika ada klarifikasi lebih lanjut yang ingin Anda sampaikan, bicarakan dengan kami.
Teknologi Industri
Komponen dan persediaan Kabel jumper (generik) Secara keseluruhan × 1 NPN Transistor Serbaguna Untuk rangkaian sel motor getar × 1 Kapasitor Keramik 0.1µF Untuk rangkaian sel motor getar × 1 Resistor 1k ohm Untuk rangkaian sel motor getar × 1 Resistor 221 oh
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Jika Anda memiliki jadwal pemeliharaan yang tepat, Anda dapat meningkatkan efisiensi, akurasi, dan menghemat biaya. Tapi bagaimana Anda mengatur jadwal terbaik? Semua organisasi berusaha untuk kualitas maksimum tetapi dengan biaya minimum, waktu henti, dan potensi masalah. Penjadwalan pemeliharaan
Kontroler motor DC hampir ada di mana-mana, dan kami melihatnya di hampir semua aplikasi. Pengendali motor DC banyak digunakan dalam kehidupan sehari-hari, mulai dari lokomotif hingga bor, dari mesin bubut hingga mobil RC. Ada ratusan perusahaan manufaktur di luar sana yang terlibat dalam pembuatan