

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 |
 |
| |||
 |
| |||
 |
| |||
 |
|
 |
| |||
 |
| |||
| ||||
 |
| |||
| ||||
 |
| |||
 |
|
HAI, HALO SETIAP SATU
Proyek ini terutama tentang penjelajah bumi yang dapat membantu petani. Proyek ini terutama berisi tiga modulus.
MODUL 1:
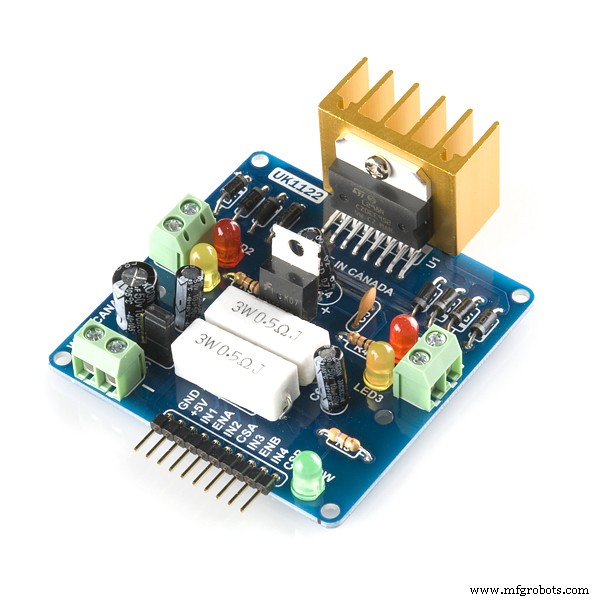
Sambungan perangkat keras untuk penyetelan lengkap sekarang pertimbangkan motor dc.
Ini membutuhkan dua motor dc dan driver motor. driver motor berisi
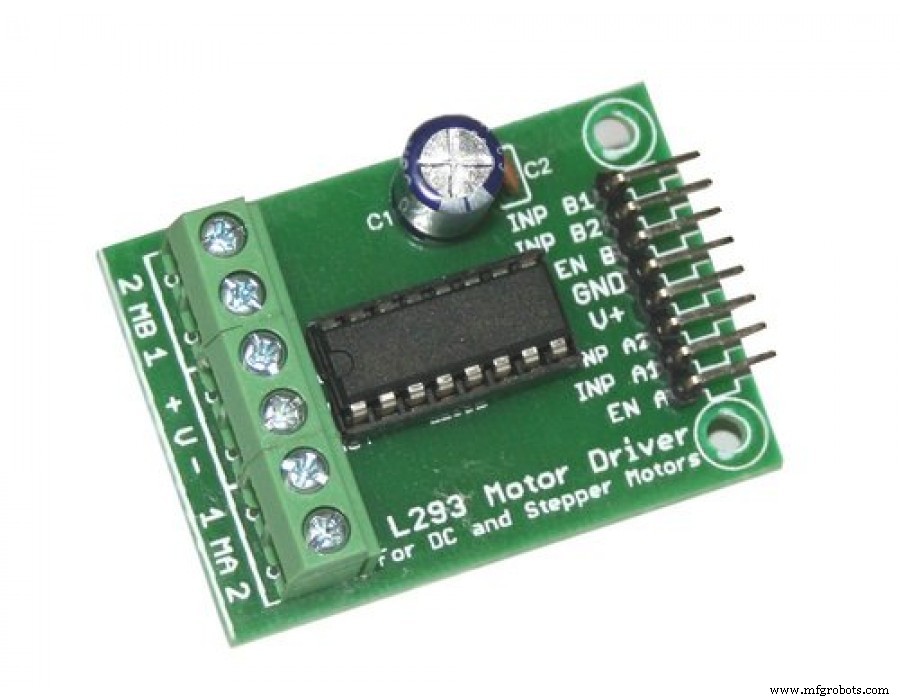
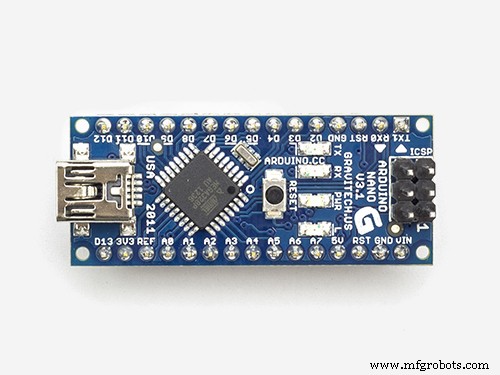
Di sini Anda harus menghubungkan v+, en1, en2, ke satu titik di papan roti dan motor empat kabel ke empat input di pin 1 ma 2. Sekarang selanjutnya pin output dari pin driver motor terhubung ke arduino dan baterai harus dihubungkan seperti diagram berikut.
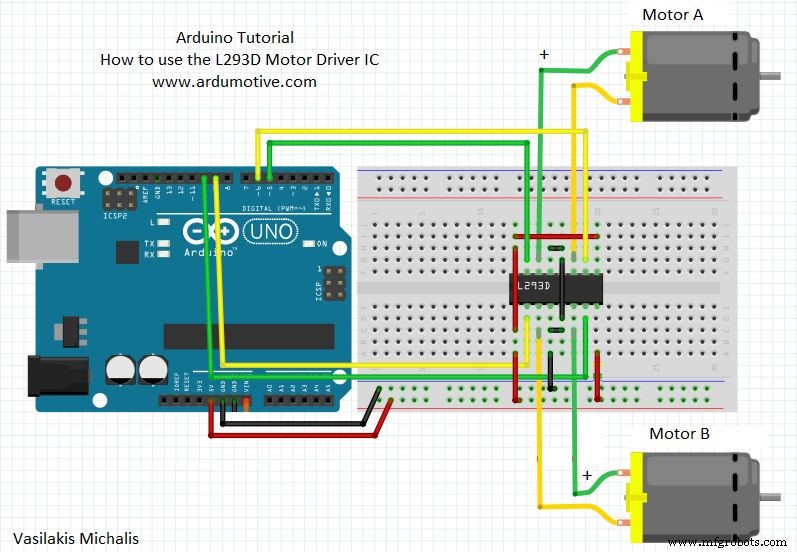
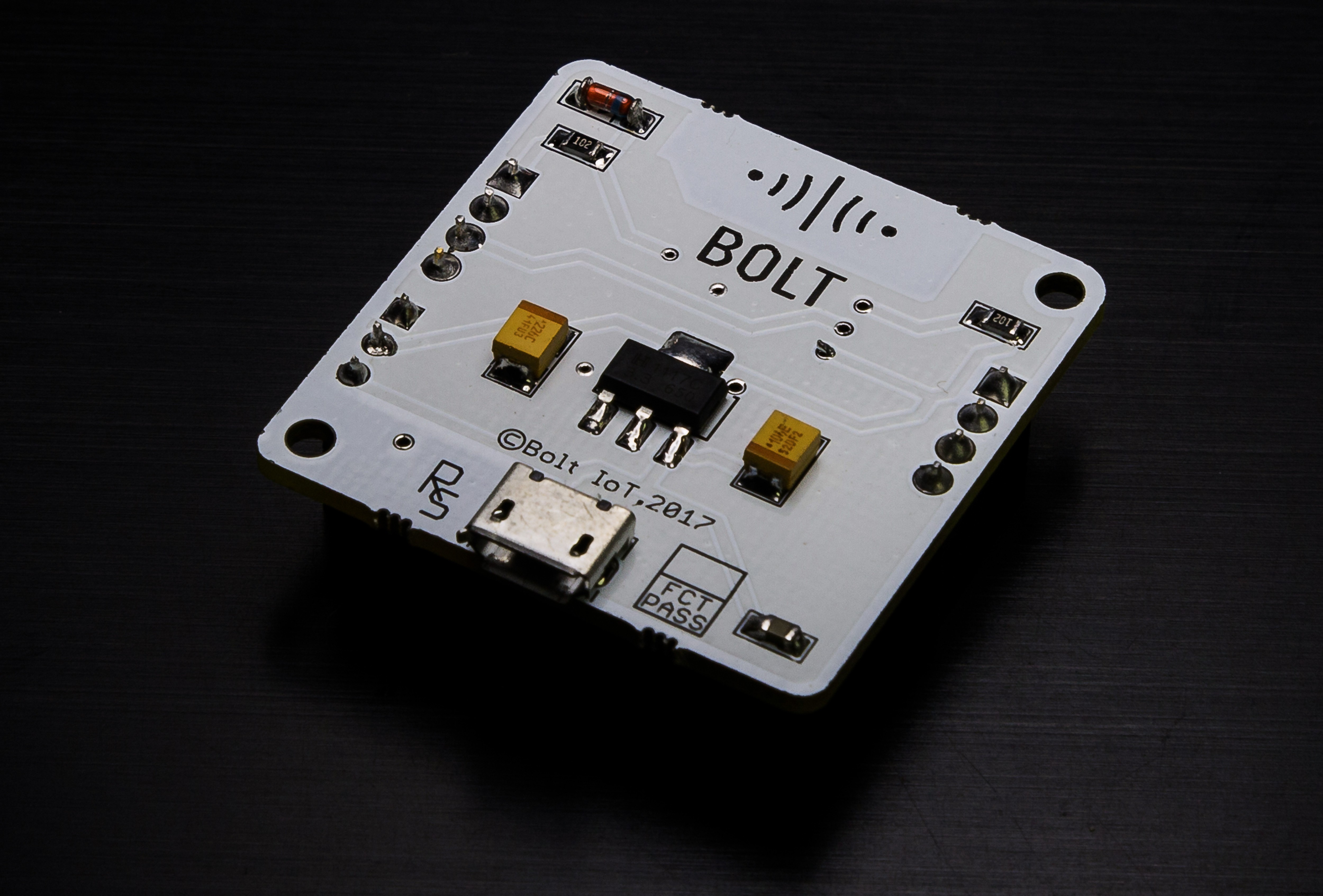
Sekarang selanjutnya kita harus menghubungkannya ke baut. Keempat pin yang sama harus dihubungkan ke pin digital baut (0, 1, 2, 3).
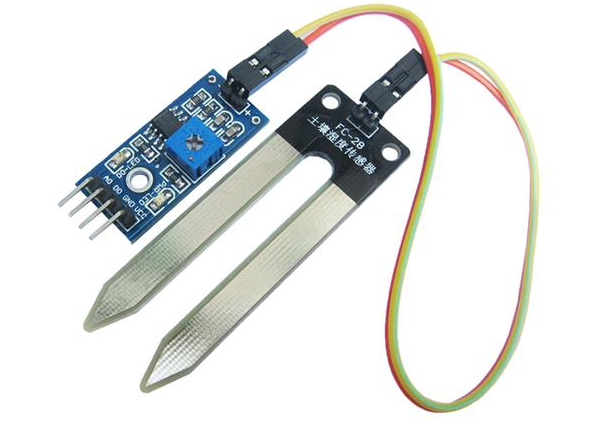
sekarang sensor tanah harus terhubung ke baut tetapi menempatkan pin digital ke baut (digital 4 pin).sekarang akhirnya waktunya untuk menghubungkan sensor suhu ke pin analog baut (A0).
Sekarang kali ini semua ground dan v+(sensor suhu, sensor kelembaban), en1, en2 ke 5v arduino dan akhirnya semua pin ini harus dilengkapi dengan baterai tegangan yang diperlukan.
MODUL 2:
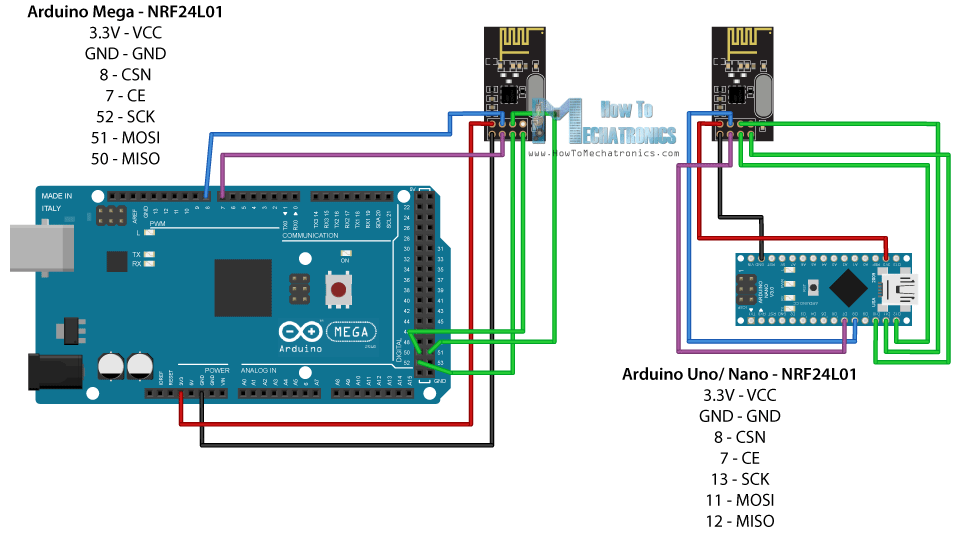
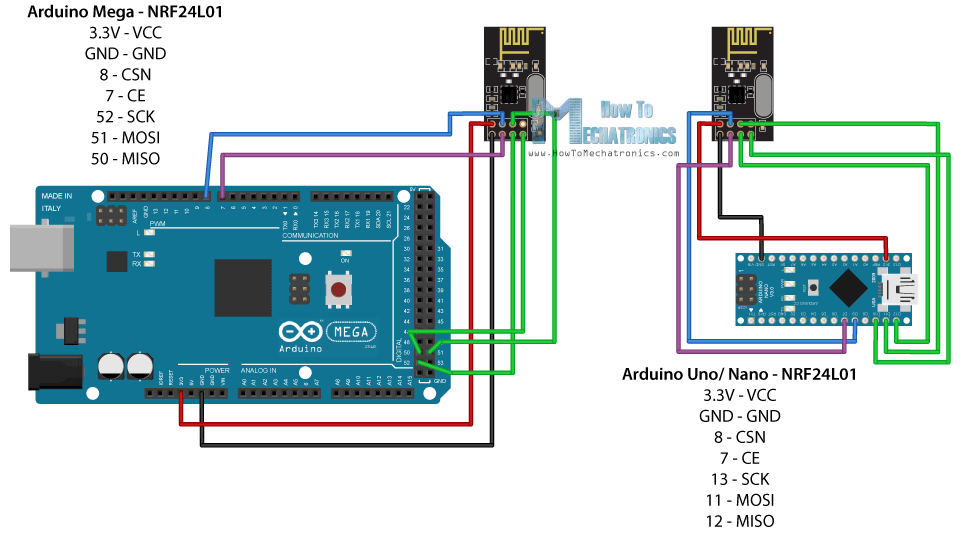
KONEKSI NRF:

Diagram di atas disebut sebagai modul nrf yang digunakan untuk komunikasi radio. Diagram di atas juga harus disertakan dalam rangkaian kita untuk mengendalikan mobil di daerah dekat.

HUBUNGAN AKHIR NRF DENGAN ARDUINO
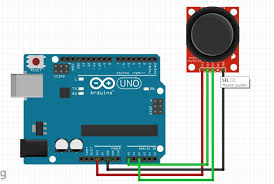
SEKARANG WAKTUNYA CONNECT JOY STICKS:
Dua joystick digunakan :
1) untuk mengontrol arah mobil.
2) untuk mengontrol servo.
MODUL 3:
KODE AKHIR
1) KODE ARDUINO:
pemancar:
#include
#include
#include
#include
#termasuk
radio RF24(7, 8); // CSN, CE
alamat byte konstan[6] ="00001";
int x_key =A1;
int y_key =A0;
int p_key =A3;
int q_key =A2;
int x_pos;
int y_pos;
int p_pos;
int q_pos;
void setup() {
radio.begin();
radio.openWritingPipe(alamat)
;
radio.setPALevel(RF24_PA_MIN);
radio.setChannel(87);
radio.setDataRate(RF24_
250KBPS);
radio.stopListening();
Serial.begin(9600);
pinMode (x_key, INPUT);
pinMode (kunci_y, INPUT);
pinMode (p_key, INPUT);
pinMode (q_key, INPUT);
}
int pos;
void loop() {
x_pos =analogRead (x_key);
y_pos =analogRead (y_key);
p_pos =analogRead (p_key);
q_pos =analogRead (q_key);
Serial.println(x_pos);
Serial.println(y_pos);
Serial.println(p_pos);
Serial.println(q_pos);
if ( p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600)
{
if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600)
{
pos=100;
radio.write(&pos, sizeof(pos));
}
if(x_pos>400 &&x_pos<600 &&y_pos<400)
{
pos=200;
radio.write(&pos, sizeof(pos));
}
if(x_pos>400 &&x_pos<600 &&y_pos>600)
{
pos=300;
radio.write(&pos, sizeof(pos));
}
if(y_pos>400 &&y_pos<600 &&x_pos<400)
{
pos=400;
radio.write(&pos, sizeof(pos));
}
if(y_pos>400 &&y_pos<600 &&x_pos>600 )
{
pos=500;
radio.write(&pos, sizeof(pos));
}
Serial.println(pos);
delay(100);
}
else if(p_pos<400 || p_pos>600)
{
if(p_pos<400)
{
pos=600;
radio.write(&pos, sizeof(pos));
}
if(p_pos>600)
{
pos=700;
radio.write(&pos, sizeof(pos));
}
delay(100);
}
} penerima:
#include
#include
#include
#include
#include
#include
Servo servo;
radio RF24(7, 8); // CSN, CE
const byte address[6] ="00001";
int servo_pin =9;
int sensor_pin=A0;
int output_value;
void setup() {
Serial.begin(9600);
radio.begin();
servo.attach (servo_pin );
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
radio.setChannel(87);
radio.setDataRate(RF24_250KBPS);
radio.startListening();
}
int pos;
void loop() {
if (radio.available()) {
radio.read(&pos, sizeof(pos));
Serial.println(pos);
if(pos==100)
{
digitalWrite(6,LOW);
digitalWrite(5,LOW);
digitalWrite (4,LOW);
digitalWrite(3,LOW);
// Serial.println("gk0");
}
else if (pos==200){
digitalWrite(6,HIGH);
digitalWrite(5,LOW);
digitalWrite(4,HIGH);
digitalWrite(3,LOW);
delay( 10);
// Serial.println("gk1");
}
else if (pos==300){
digitalWrite(6,LOW);
digitalWrite(5,HIGH );
digital Write(4,LOW);
digitalWrite(3,HIGH);
delay(10);
// Serial.println("gk2");
}
else if (pos==400){
digitalWrite(6,LOW);
digitalWrite(5,HIGH );
digitalWrite(4,HIGH);
digitalWrite(3 ,RENDAH);
delay(10);
// Serial.println("gk3");
}
else if (pos==500){
digitalWrite(6,HIGH);
digitalWrite(5,LOW );
digitalWrite(4,LOW);
digitalWrite(3,HIGH);
delay(10);
// Serial.println("gk5");
}
else if (pos==600){
servo.write(90);
delay(10 );
// Serial.println("gk6");
}
else if (pos==700){
servo.write(180);
delay( 10);
// Serial.println("gk7");
}
}
else
{
Serial.println( "Koneksi terputus");
}
}
} sekarang untuk menerima pesan telegram :( kode server )
login ke salah satu server seperti ripl.it lalu upload kodenya
main.py
import request # untuk membuat permintaan HTTP
import json # library untuk menangani data JSON
import time # modul untuk operasi sleep
dari boltiot import Bolt # mengimport Bolt dari modul boltiot
import conf # file konfigurasi
mybolt =Bolt(conf.bolt_api_key, conf.device_id)
def get_sensor_value_from_pin(pin):
coba:
respons =mybolt.digitalRead (pin)
data =json.loads(respons)
if data["success"] !=1:
print("Permintaan tidak berhasil")
print("Ini adalah respon->", data)
kembali -999
sensor_value =int(data["value"])
kembalikan sensor_value
kecuali Pengecualian sebagai e:
print("Ada yang tidak beres saat mengembalikan nilai sensor")
print(e)
return -999
def send_telegram_message(message):
"""Mengirim pesan melalui Telegram" ""
url ="https://api.telegram.org/" + conf.telegram_bot_id + "/sendMessage"
data ={
"chat_id":conf.telegram_chat_id,
"text":pesan
}
coba:
re sponse =request.request(
"GET",
url,
params=data
)
print("Ini adalah tanggapan Telegram")
print(response.text)
telegram_data =json.loads(response.text)
kembalikan telegram_data["ok"]
kecuali Pengecualian sebagai e:
print("Terjadi kesalahan dalam mengirimkan pesan peringatan melalui Telegram")
print(e)
mengembalikan Salah
sementara Benar:
# Langkah 1
sensor_value =get_sensor_value_from_pin("4")
print("Nilai sensor saat ini adalah:", sensor_value)
# Langkah 2
if sensor_value ==-999:
print("Permintaan tidak berhasil. Melewati.")
time.sleep(10)
lanjutkan
# Langkah 3
if sensor_value>=conf.threshold:
print("Nilai suhu saat ini adalah ")
message ="Nilai kelembapan hanya lebih besar dari ambang batas "
telegram_status =send_telegram_message(message)
print("Ini adalah status Telegram:", telegram_status)
# Langkah 4
time.sleep(100) conf.py:
"""Konfigurasi untuk telegram_alert.py"""
bolt_api_key ="XXXX" # Ini adalah Kunci API Bolt Cloud Anda
device_id ="XXXX" # Ini adalah ID perangkat dan akan mirip dengan BOLTXXXX dimana XXXX adalah beberapa angka
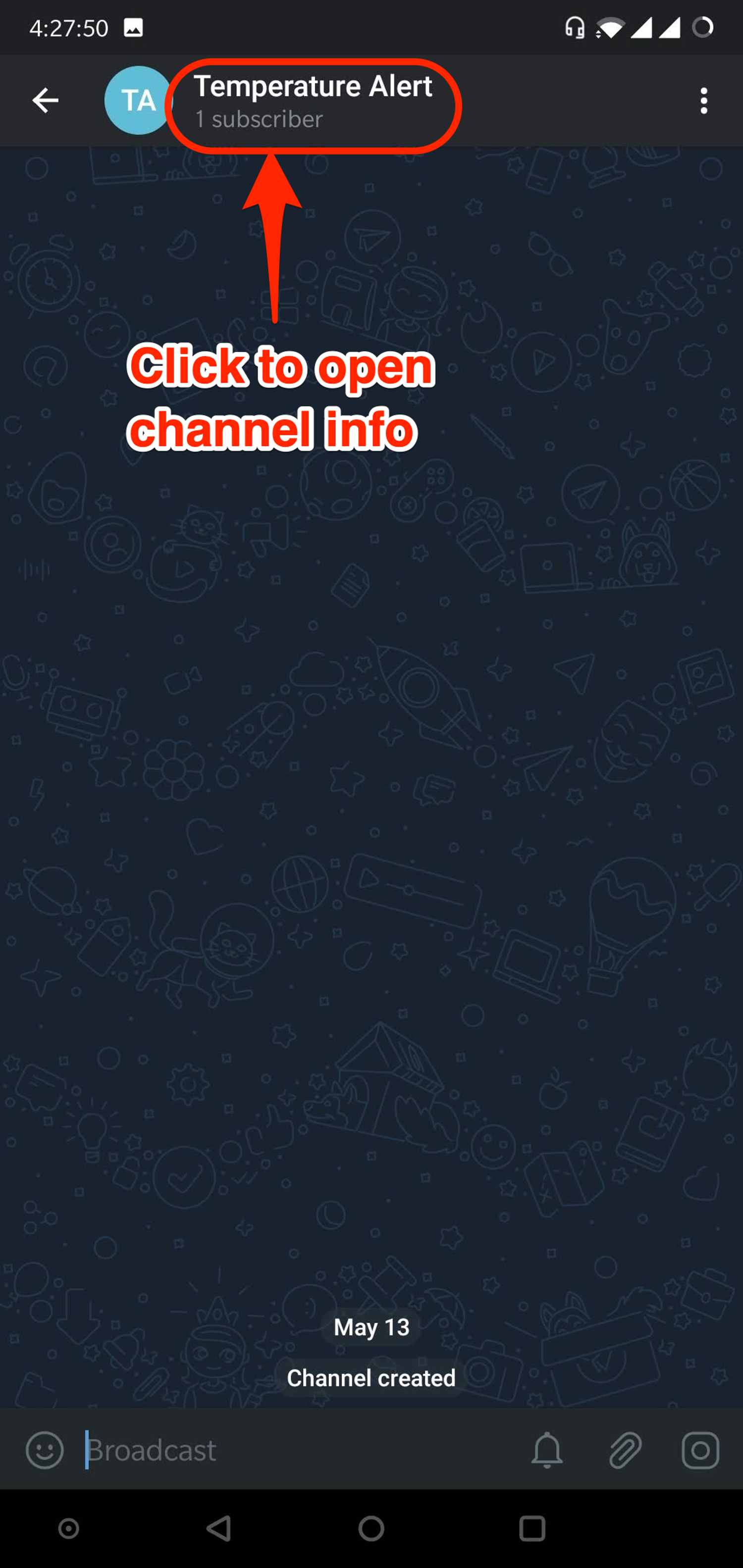
telegram_chat_id ="@XXXX" # Ini adalah ID saluran dari saluran Telegram yang dibuat. Tempel setelah @
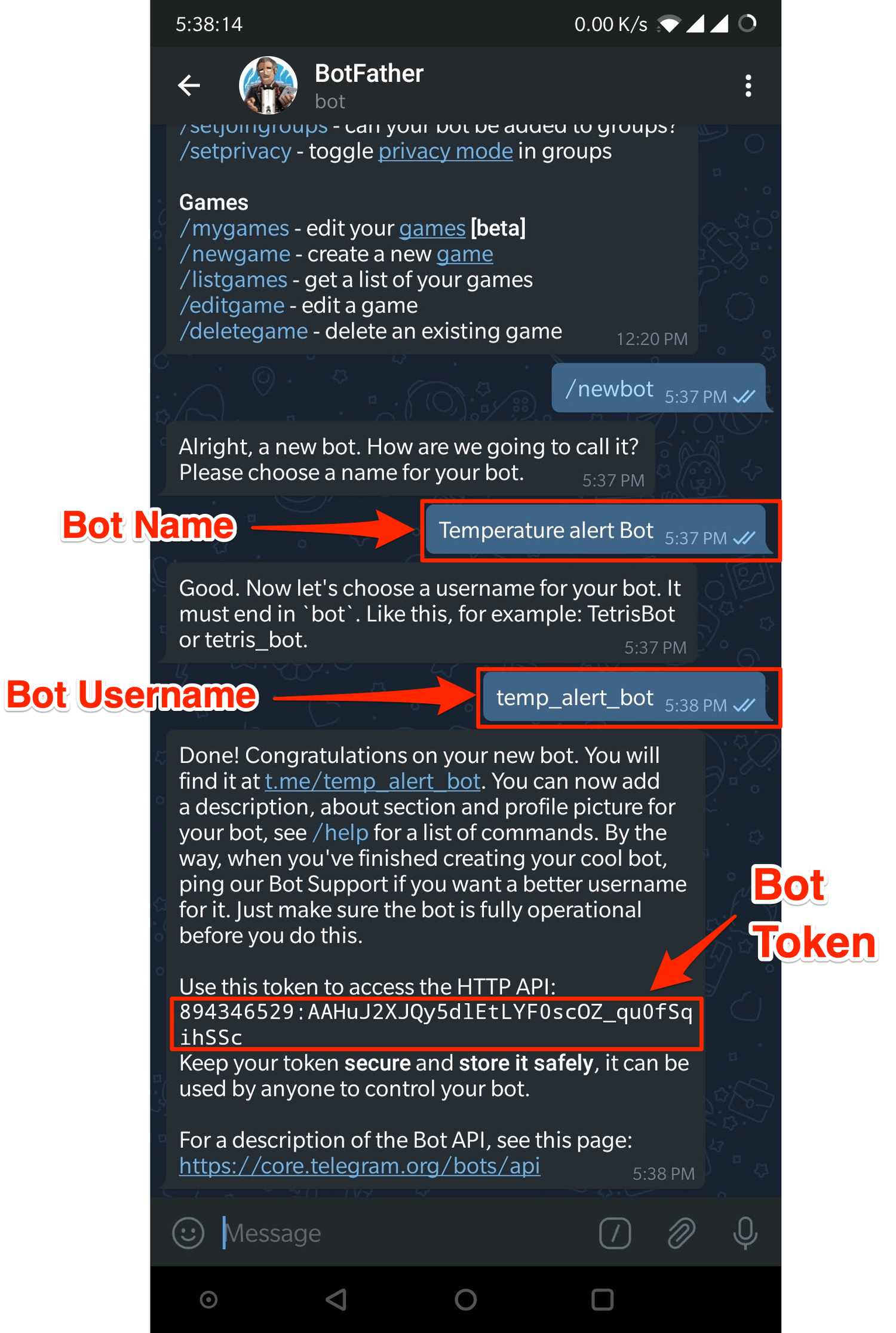
telegram_bot_id ="botXXXX" # Ini adalah ID bot dari Bot Telegram yang dibuat. Tempelkan setelah bot
ambang =0 # Ambang batas di mana peringatan harus dikirim masukkan nilai bot dan api Anda
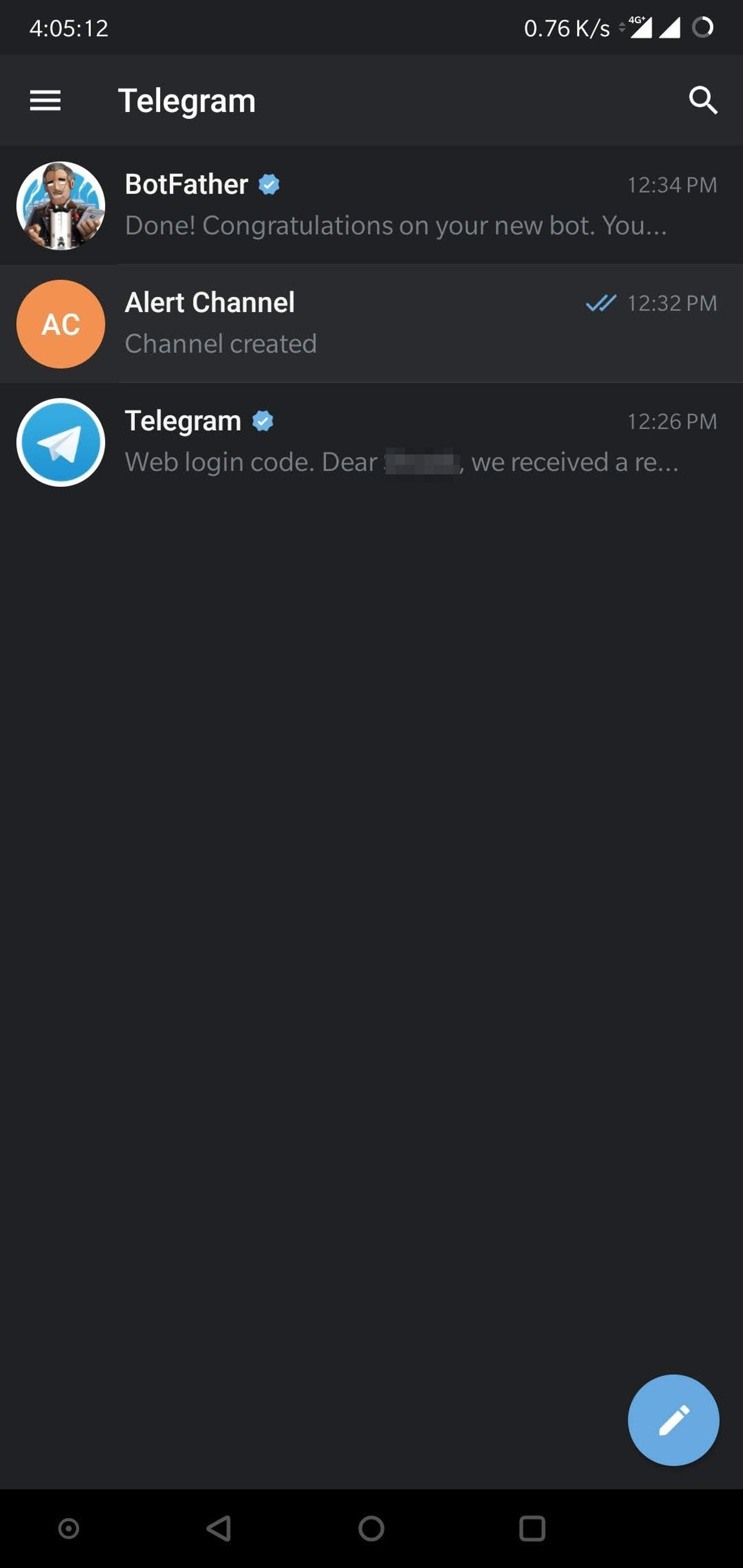
PROSES:
Pesan peringatan menggunakan Telegram
Apa itu Telegram?
Telegram adalah aplikasi perpesanan yang mirip dengan Whatsapp. Anda dapat mengirim dan menerima pesan bersama dengan file juga. Ini GRATIS untuk digunakan. Anda dapat mengakses platform melalui ponsel Android/iOS/Windows dan juga PC atau Mac Anda.

Beberapa terminologi Telegram -
Apa itu saluran Telegram?
Saluran adalah untuk Telegram apa Grup untuk Whatsapp. Saluran adalah alat untuk menyiarkan pesan Anda ke khalayak luas. Mereka dapat memiliki jumlah pelanggan yang tidak terbatas, mereka dapat menjadi publik dengan URL permanen dan setiap posting di saluran memiliki penghitung tampilan sendiri.
Apa itu Bot?
Bot adalah aplikasi pihak ketiga yang berjalan di dalam Telegram. Pengguna dapat berinteraksi dengan bot dengan mengirimkan pesan, perintah, dan permintaan kepada mereka.
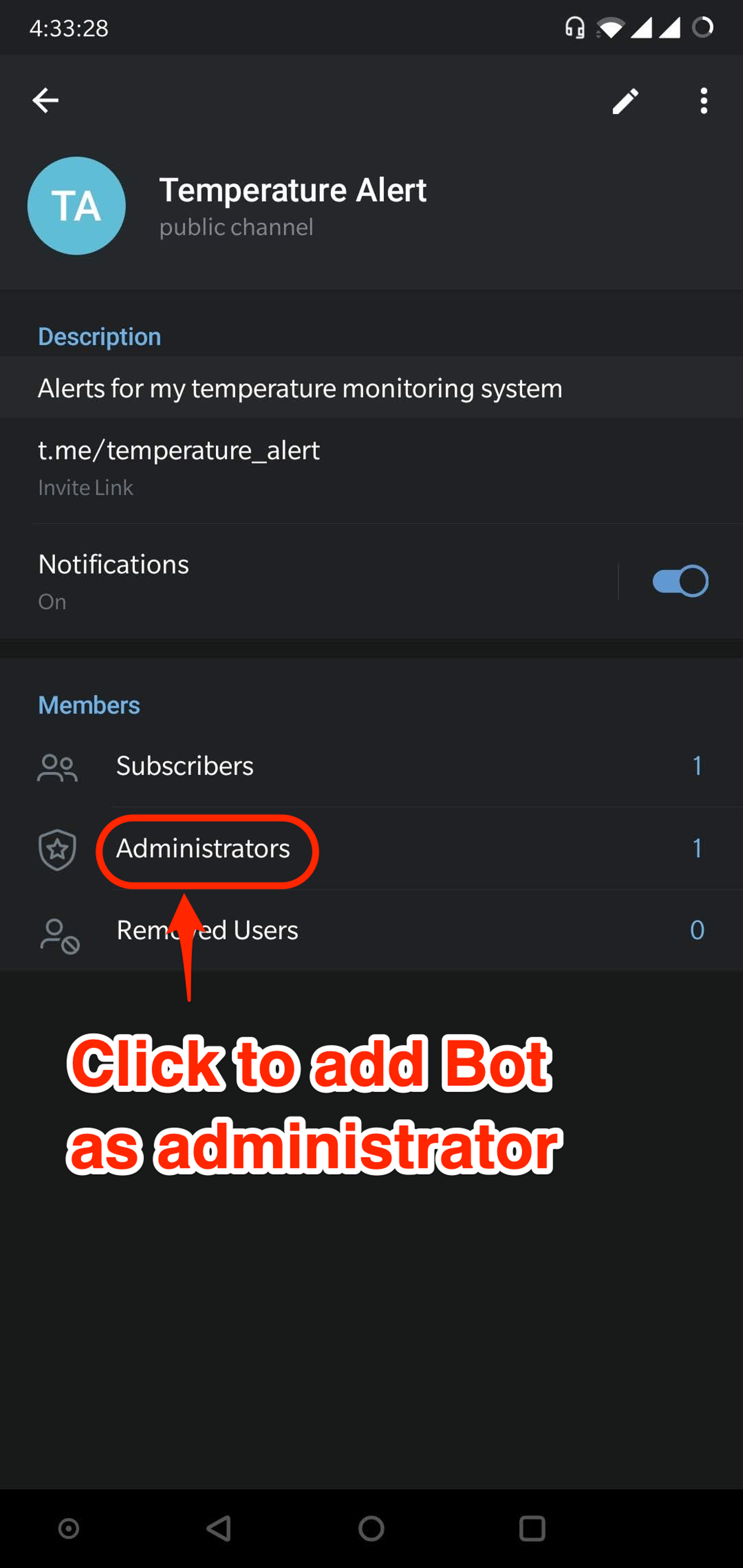
Kami akan menggunakan Bot untuk mengirim peringatan di saluran kami.
Apa yang akan kita pelajari dalam proyek ini?
Dalam proyek ini, Anda akan dapat mengirim peringatan melalui Telegram ke ponsel Anda ketika nilai sensor melebihi ambang batas yang Anda tetapkan.
Apa yang saya perlukan untuk proyek ini?
Untuk mengirim peringatan dan pesan melalui Telegram, Anda memerlukan,
Siapkan Telegram
Langkah-langkah untuk mendaftar/masuk ke Telegram
Anda telah berhasil menginstal Telegram dan mengatur akun Anda. Dalam pelajaran berikutnya, kita akan belajar lebih banyak tentang Saluran dan Bot.
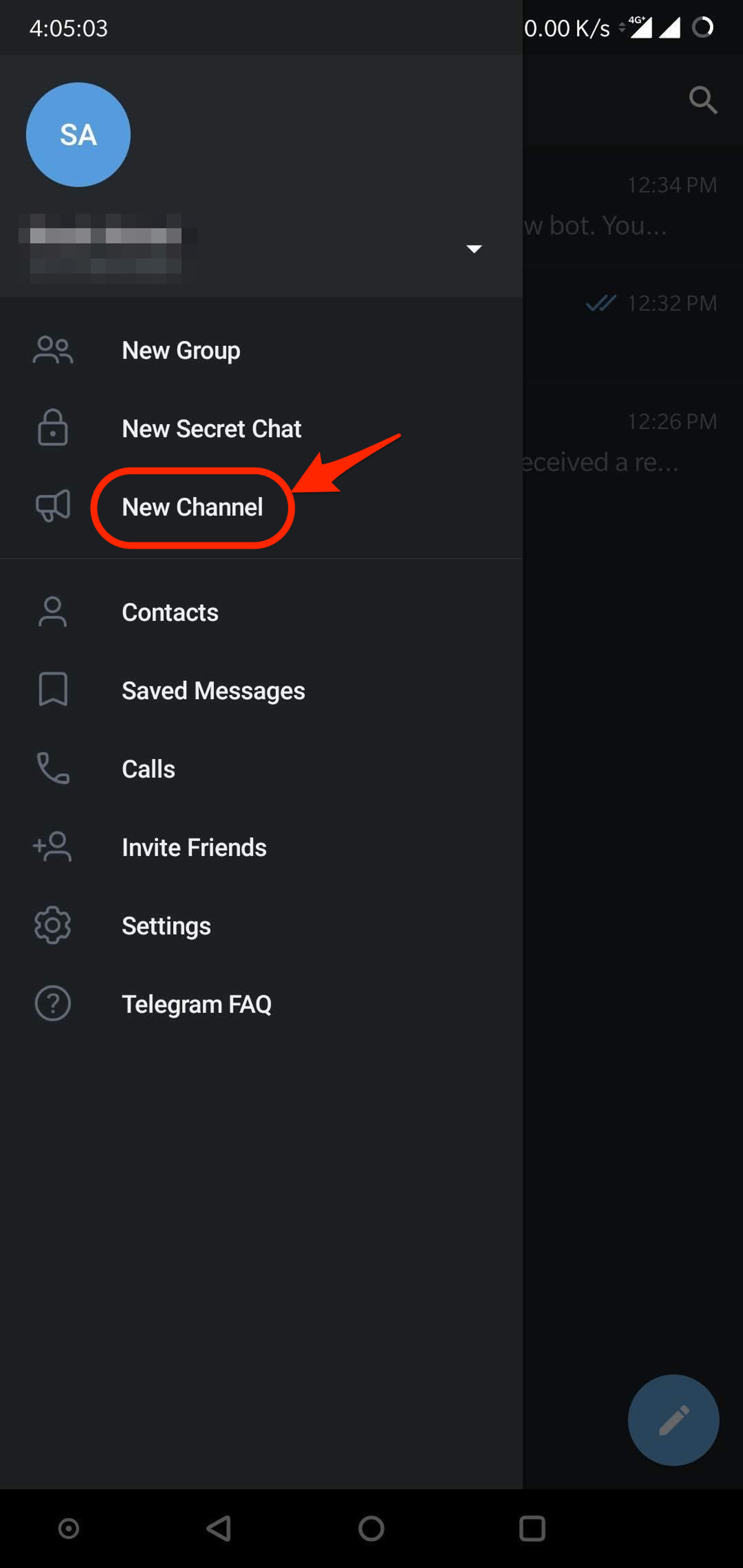
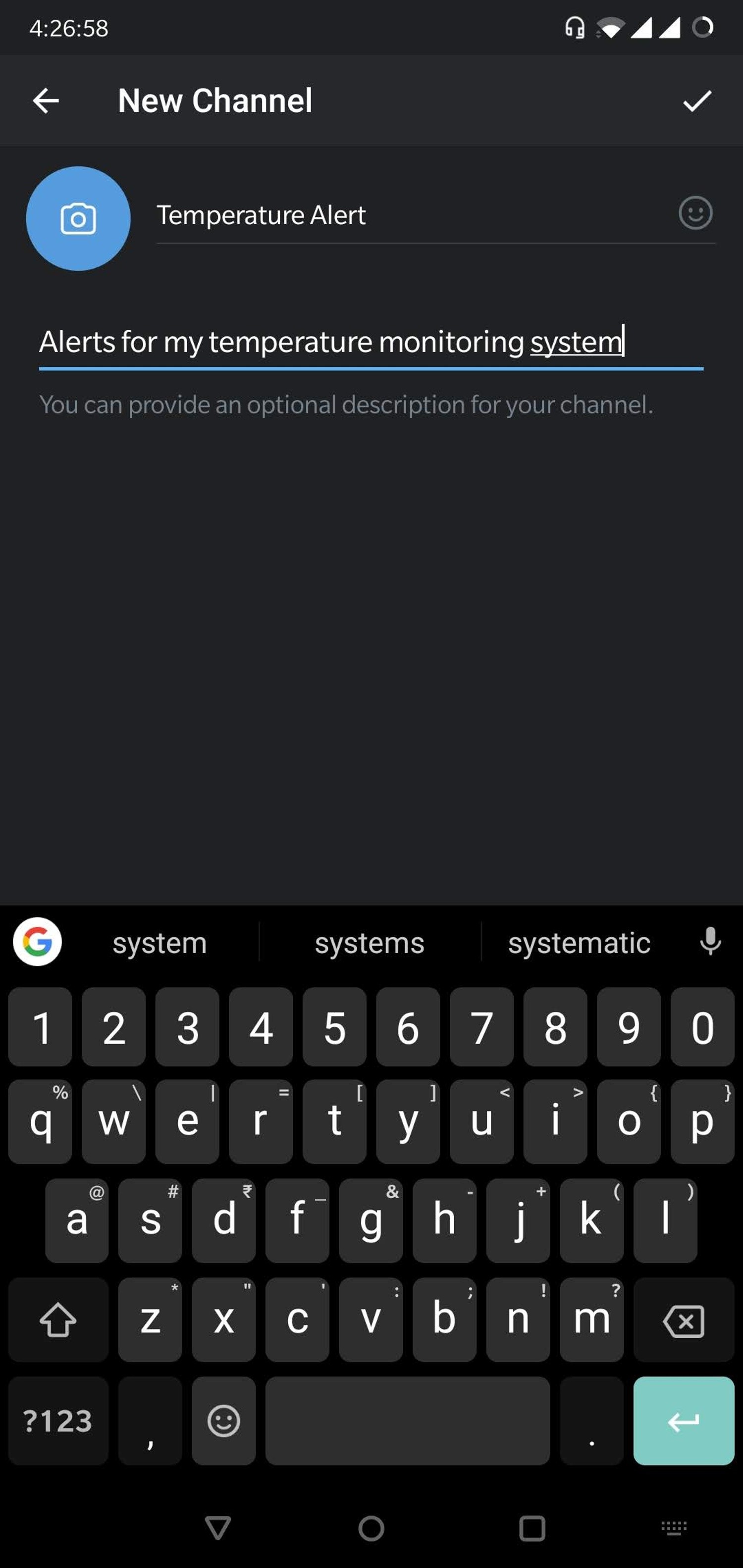
Membuat Saluran
Apa itu saluran Telegram?
Saluran adalah untuk Telegram apa Grup untuk Whatsapp. Saluran adalah alat untuk menyiarkan pesan Anda ke khalayak luas. Mereka dapat memiliki jumlah pelanggan yang tidak terbatas, mereka dapat menjadi publik dengan URL permanen dan setiap posting di saluran memiliki penghitung tampilan sendiri.
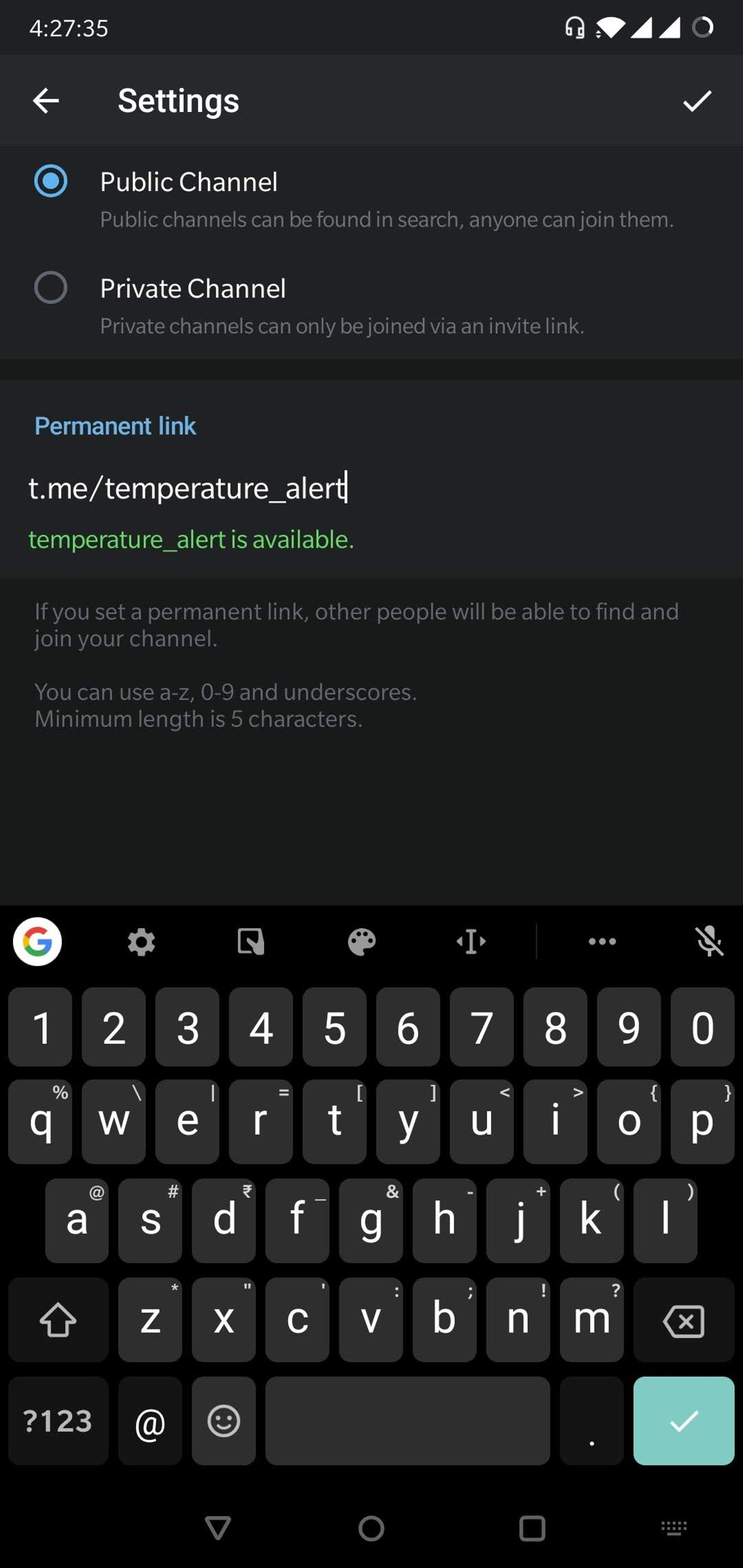
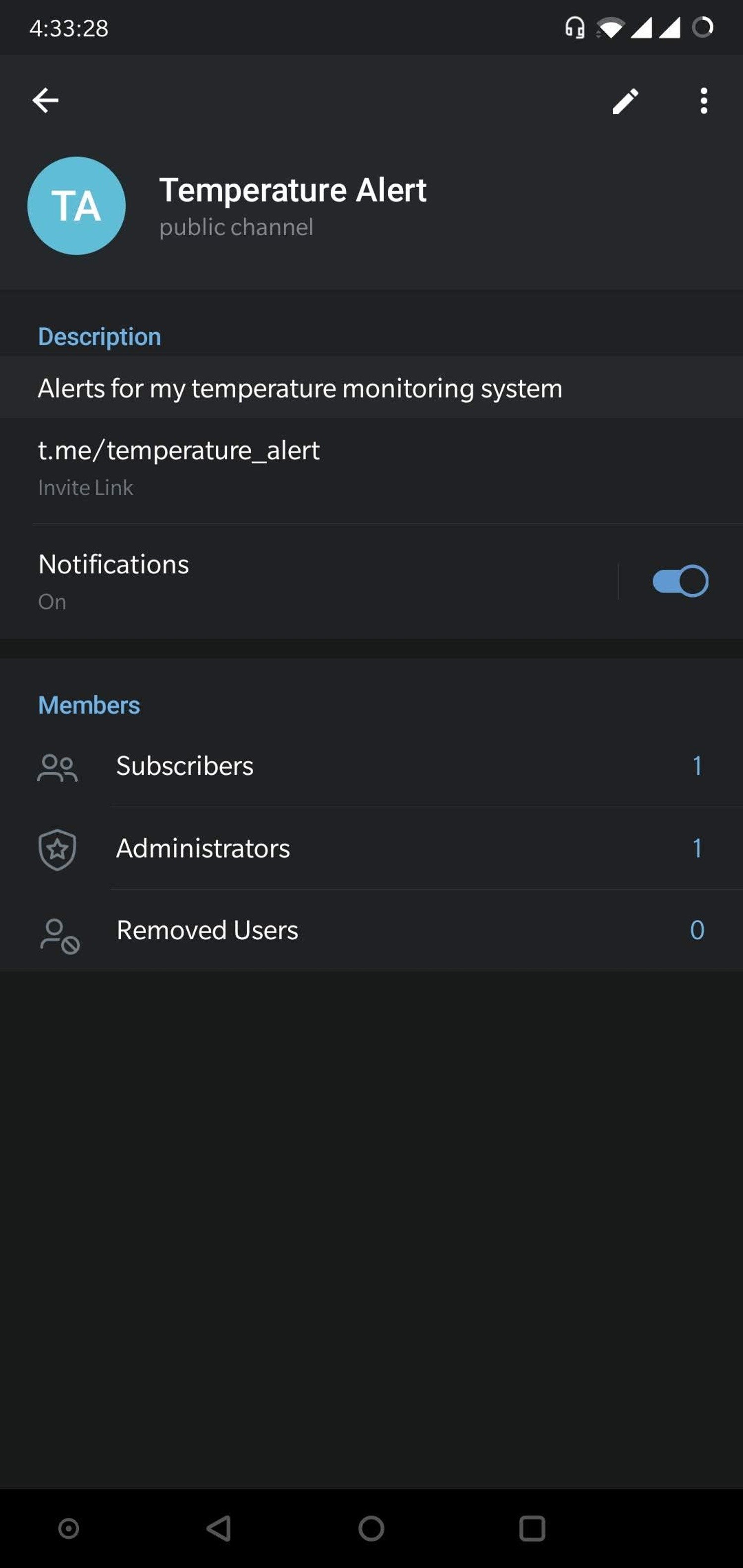
Langkah-langkah membuat saluran

Buat Keduanya
Apa itu Bot?
Bot adalah aplikasi pihak ketiga yang berjalan di dalam Telegram. Pengguna dapat berinteraksi dengan bot dengan mengirimkan pesan, perintah, dan permintaan kepada mereka.
Kami akan menggunakan Bot untuk mengirim peringatan di saluran kami.
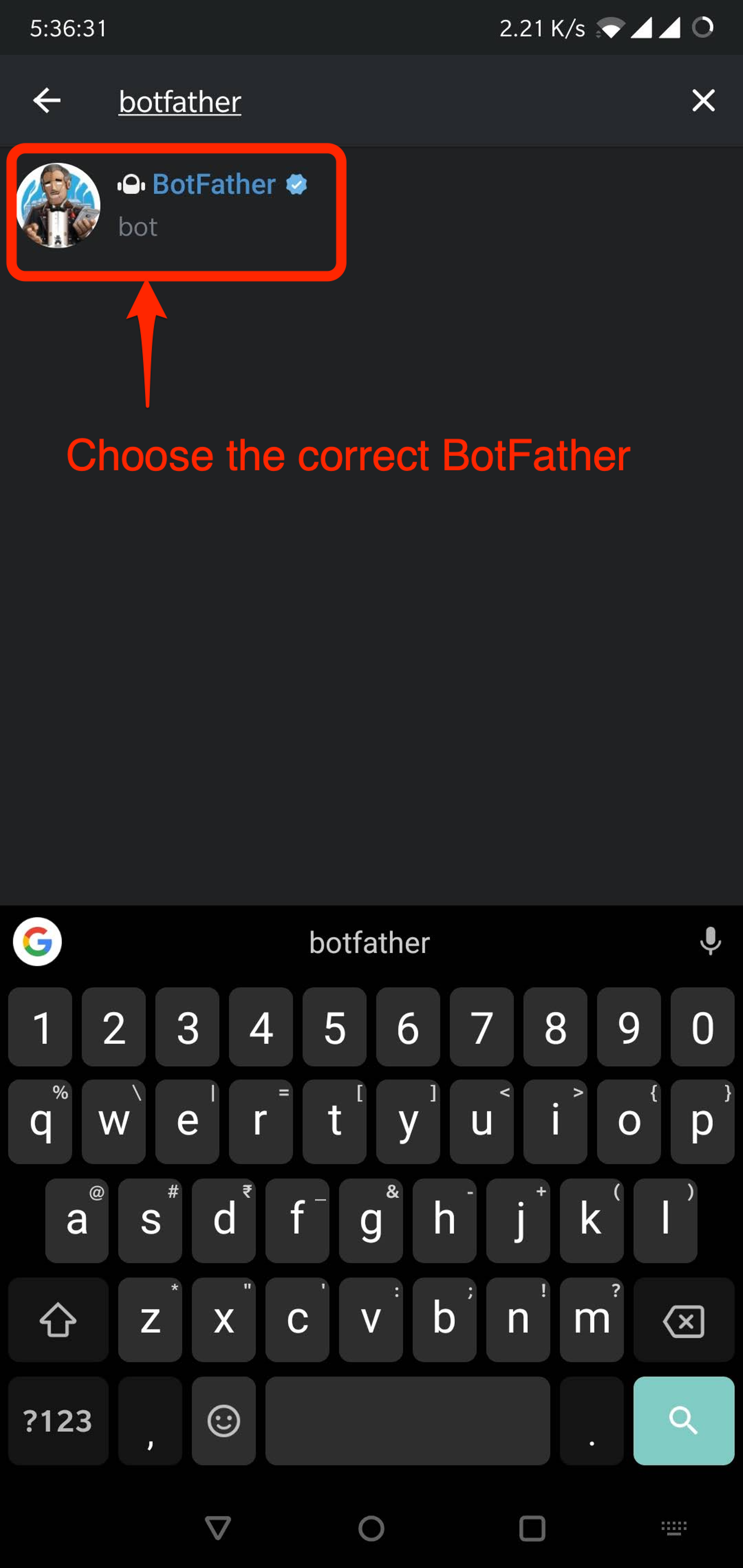
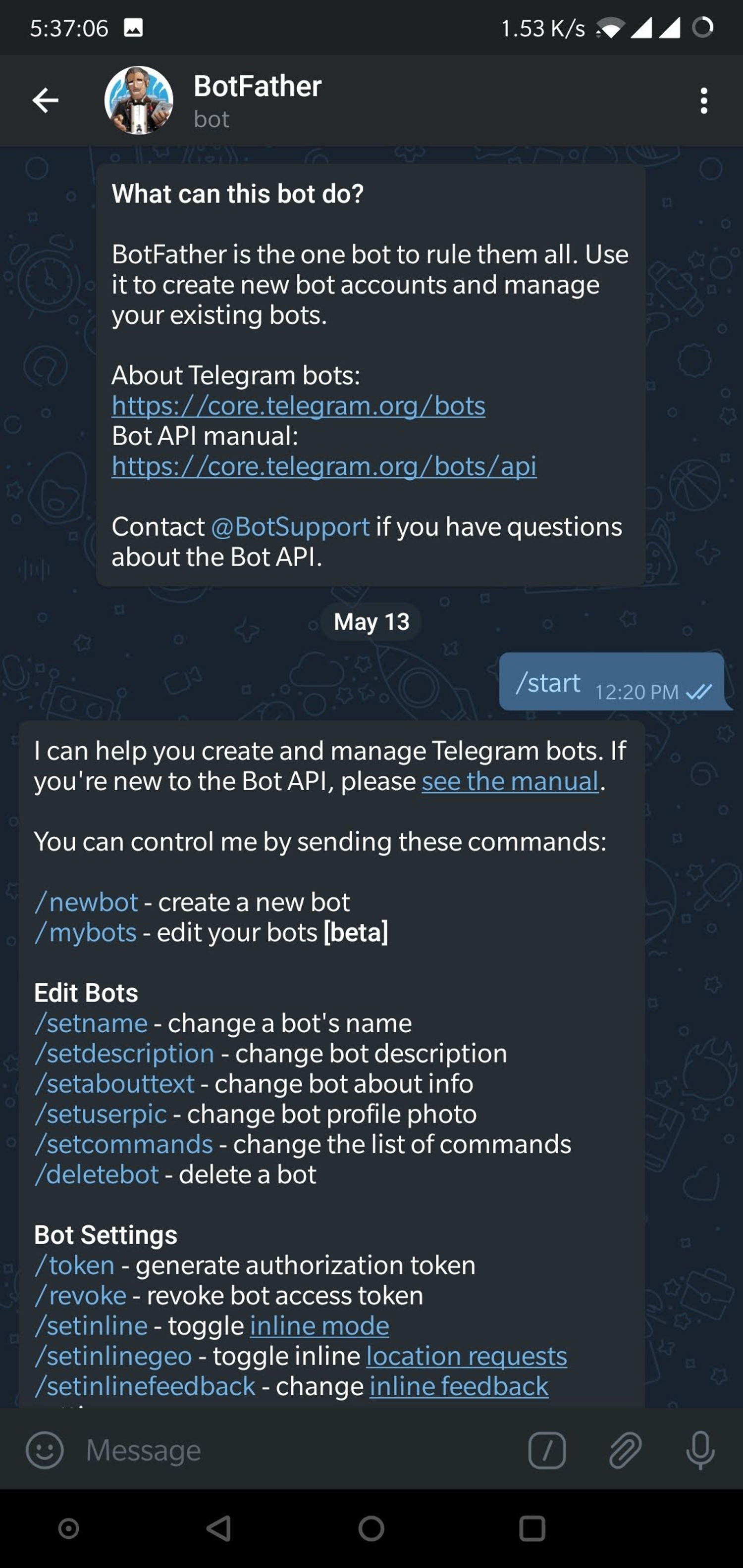
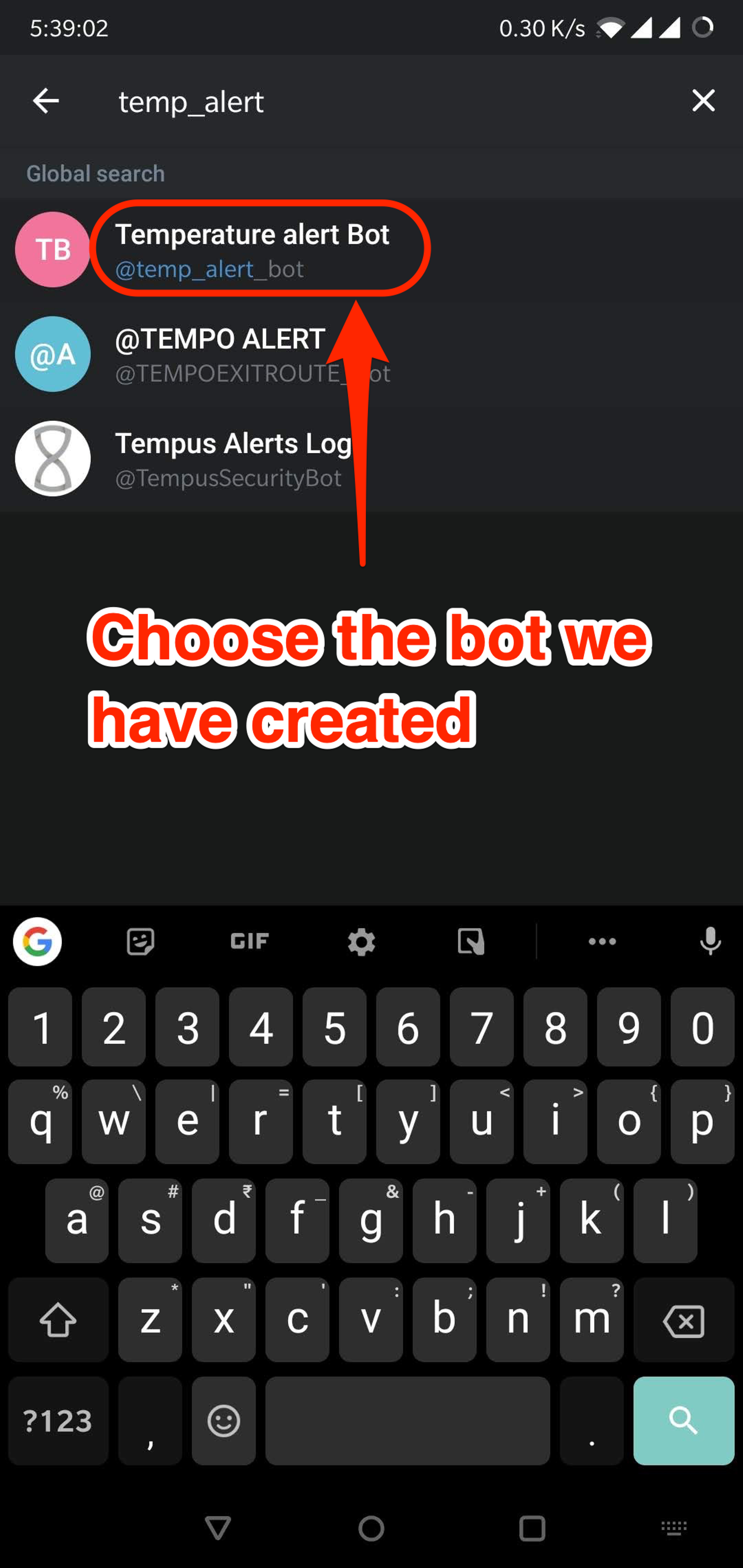
Buat Bot baru
Telegram memungkinkan kita untuk membuat bot baru dengan bantuan bot yang disebut sebagai "BotFather". Ini adalah bot tunggal untuk membuat dan mengelola bot lain.
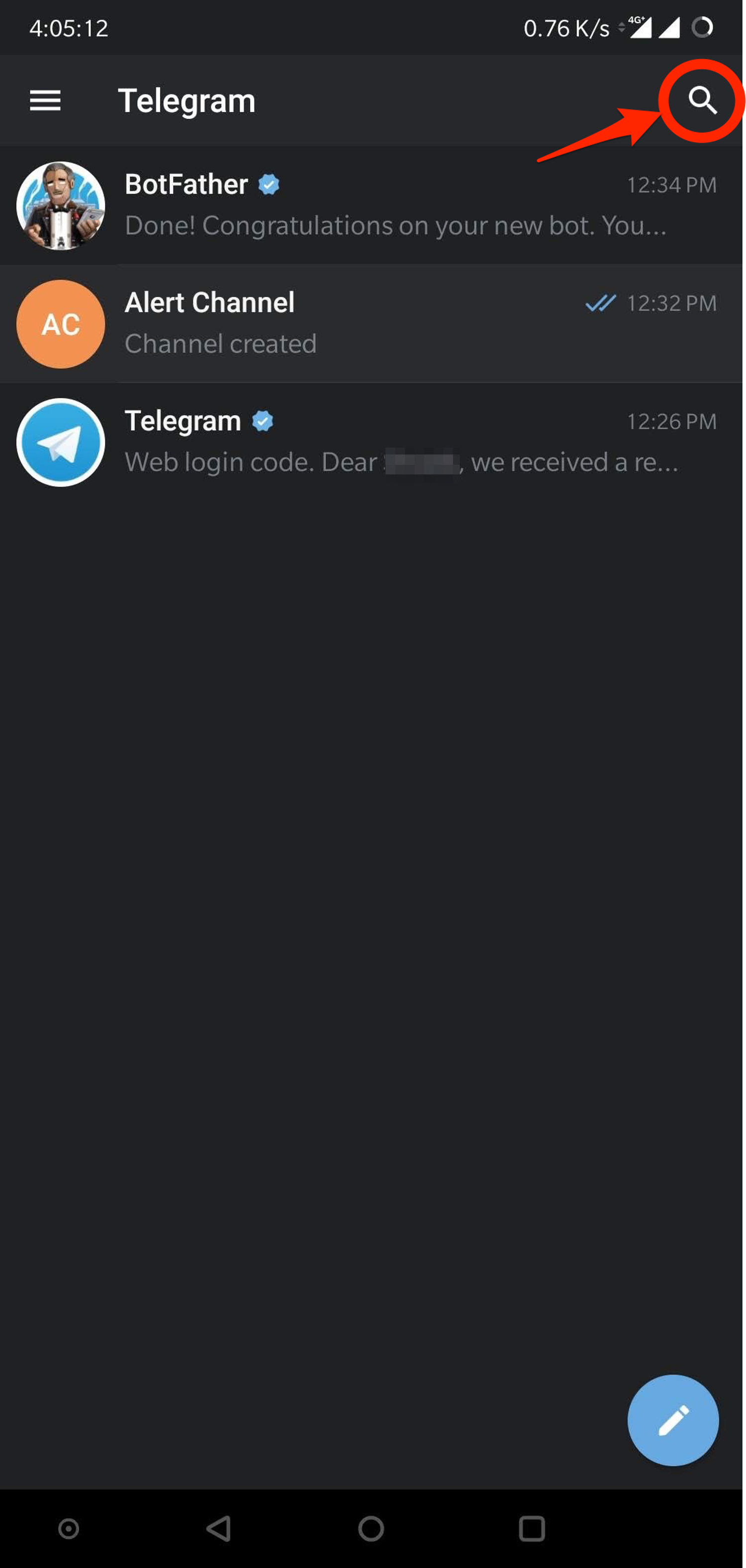
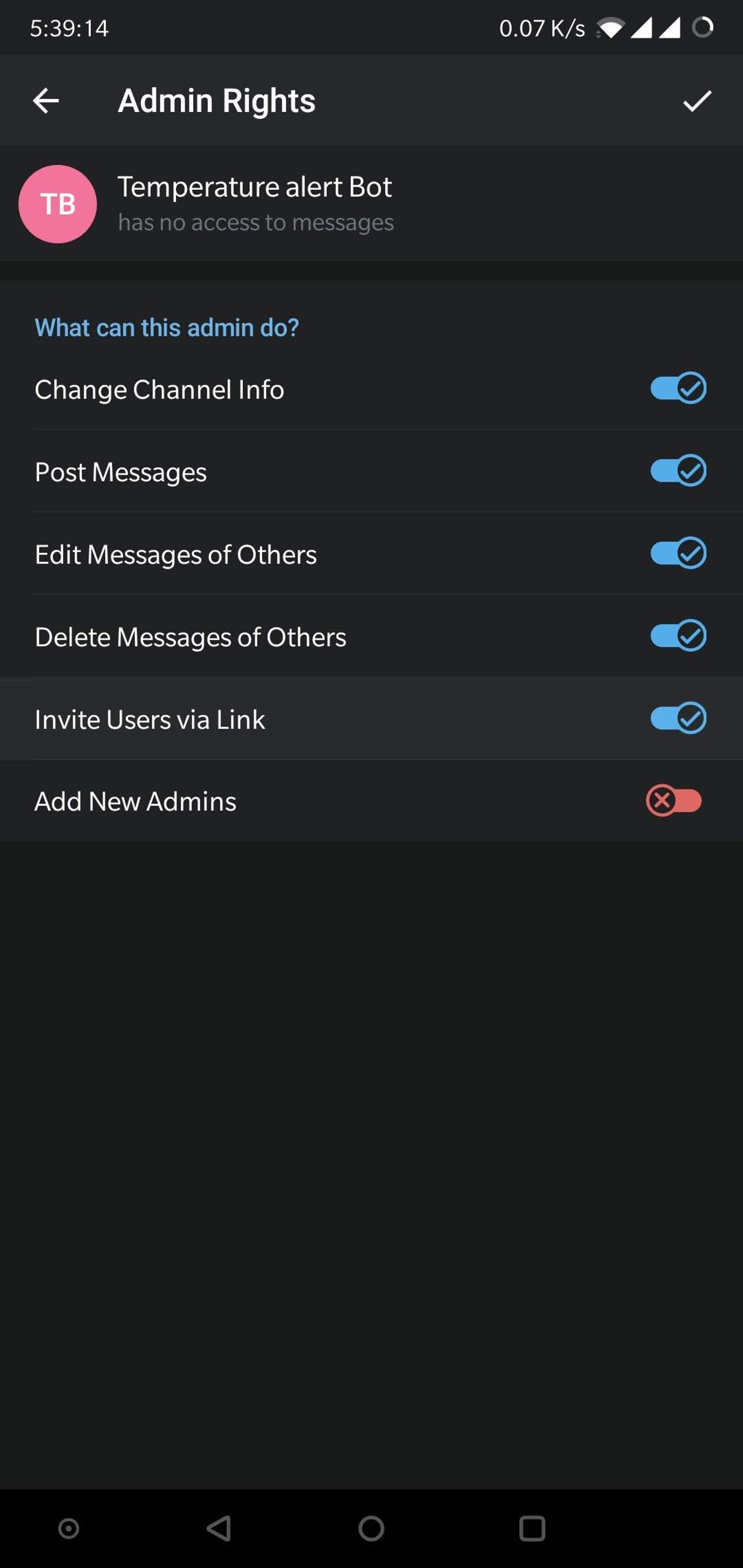
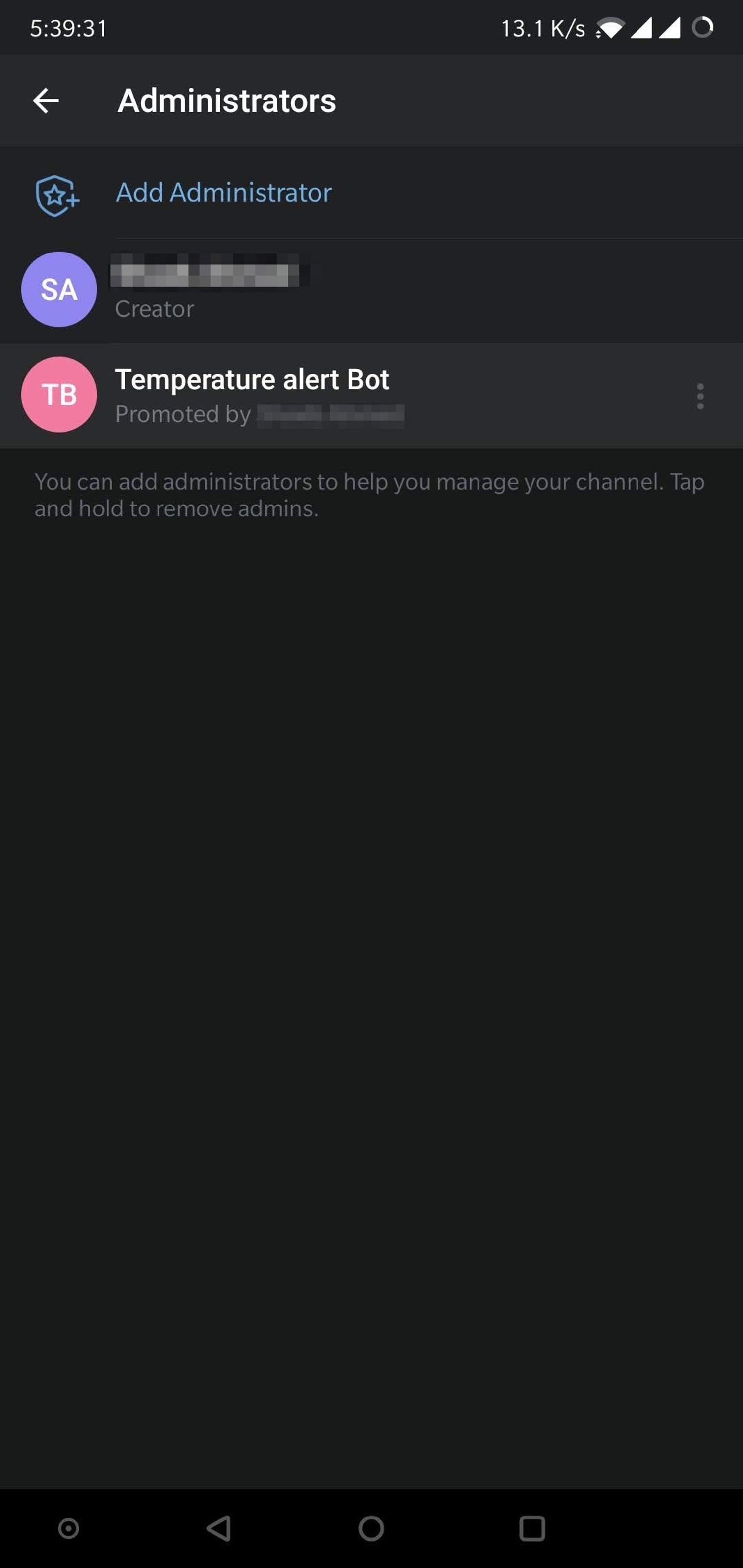
Tambahkan bot ke saluran
SEKARANG MENGATUR JARINGAN UNTUK TWILLO DAN MAIL GUN
Terima nilai sensor suhu LM35 melalui SMS dan Email kapan saja di ponsel Anda menggunakan Asisten Google.

Apa yang Anda lakukan ketika Anda perlu memeriksa nilai sensor proyek Iot Anda kapan saja? Anda cukup masuk ke cloud untuk memeriksanya. Tampaknya sederhana, bukan? Tetapi bagaimana jika Anda harus memeriksa nilainya sekali dalam setiap jam atau sekali dalam beberapa menit dan itu berkali-kali dalam sehari. Itu akan sedikit (sangat) rumit, bukan? Sekarang, bayangkan sebuah dunia di mana Anda bisa mendapatkan nilai sensor melalui SMS dan Email hanya dengan mengatakan "Kirimkan saya nilai sensor" ke Asisten Google Anda. Tunggu, tunggu, tunggu. Situasi itu tidak lagi imajiner karena Anda sendiri dapat melakukannya dalam beberapa langkah. Baca terus untuk mengetahuinya.
Dalam proyek ini, kami akan menerima nilai sensor suhu dari sensor LM35 melalui SMS dan Email melalui perintah ke Asisten Google.
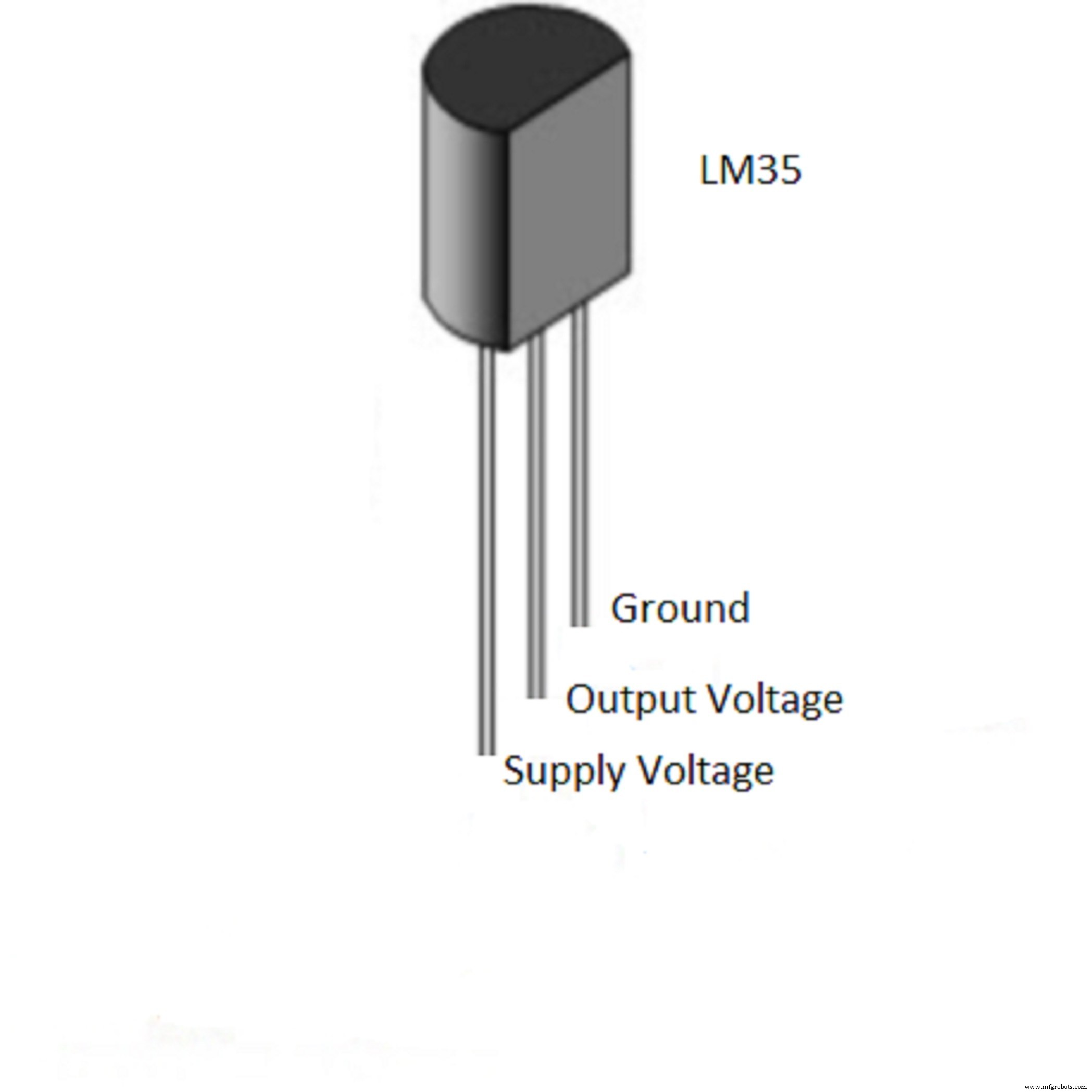
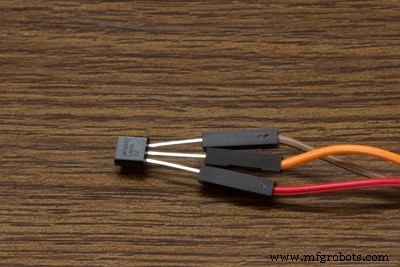
Langkah 1:Pengaturan Perangkat Keras
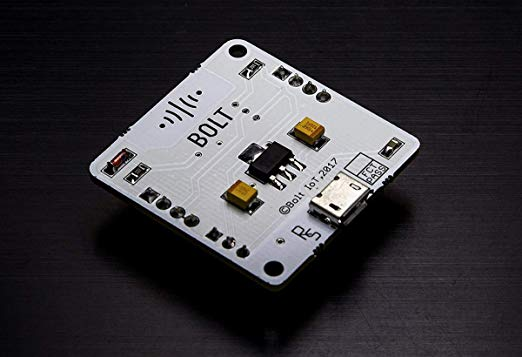
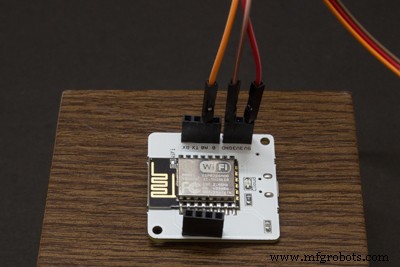
Pegang sensor LM35 di tangan Anda sehingga namanya terlihat oleh Anda. Tiga pin, dari kiri ke kanan, adalah VCC, output dan GND. Hubungkan tiga pin ke kabel female-to-male. Hubungkan ketiga kabel, sesuai dengan tiga pin dari kiri ke kanan, ke pin 5 V, A0 dan GND pada modul Bolt WiFi. Hubungkan modul WiFi ke sumber daya 5 V. Pastikan terhubung ke koneksi internet aktif.
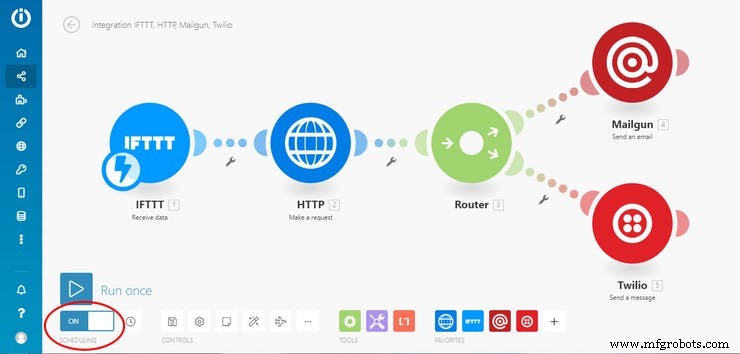
Langkah 2:Membuat modul IFTTT di Integromat
Masuk ke akun Integromat Anda. Jika Anda belum mendaftar di Integromat, maka Anda dapat membuat akun dengan mengklik di sini. Setelah masuk, klik "Buat skenario baru" di kanan atas layar. Pilih IFTTT, HTTP, Mailgun dan Twilio di layar untuk memilih alat yang diperlukan dan kemudian klik "Lanjutkan". Kemudian klik pada lingkaran putih dan pilih IFTTT dari daftar dan kemudian pilih "Terima Data" dari menu. Modul ini penting untuk menghubungkannya ke Applet di IFTTT yang akan dibahas nanti. Klik "Tambah" untuk menambahkan Webhook baru diikuti dengan memberikan nama yang sesuai untuk itu dan klik "Simpan". Sekarang, Anda akan mendapatkan URL atau tautan. Simpan untuk tujuan lebih lanjut.

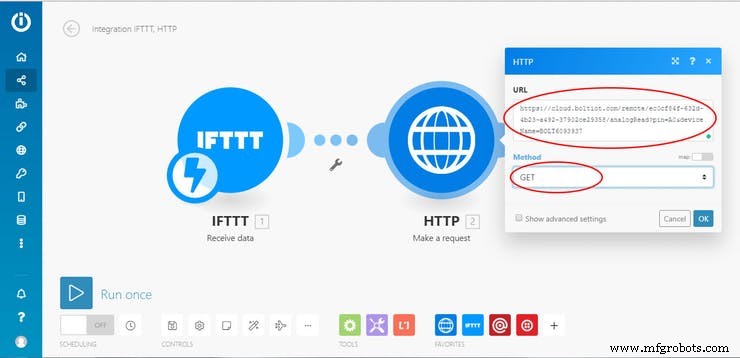
Langkah 3:Membuat modul HTTP di Integromat
Selanjutnya, klik simbol "+" yang dilampirkan pada modul untuk menambahkan modul baru. Pilih "HTTP" diikuti dengan "Buat permintaan". Ini diperlukan untuk menerima nilai sensor dari Bolt Iot Cloud. Di URL, tempel tautan https://cloud.boltiot.com/remote/your-bolt-iot-api-key/analogRead?pin=A0&deviceName=BOLTXXXXXXX. Ganti "your-bolt-iot-api-key" dan "BOLTXXXXXXX" dengan kredensial Anda masing-masing yang dapat Anda temukan dengan mudah di Bolt Iot Cloud Anda. Biarkan metodenya menjadi "GET" dan klik "OK".
Tautan di atas digunakan untuk mengambil nilai sensor dari Bolt Iot Cloud. Output dari link di atas akan berupa {"value":"XXX", "success":"1"} dimana XXX adalah nilai sensornya.
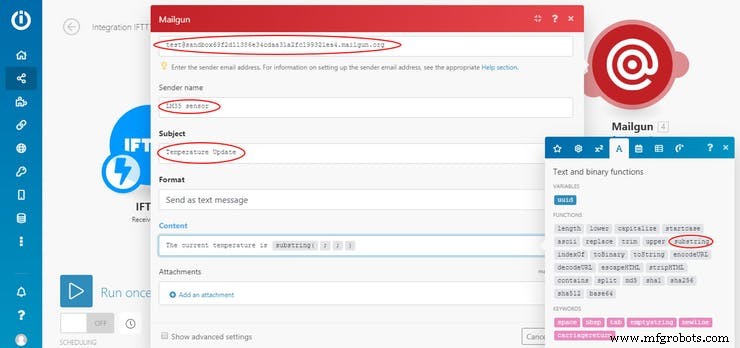
Langkah 4:Membuat modul Mailgun di Integromat
Sekarang, klik lagi pada "+" dan ketik "Flow Control" di kotak pencarian dan pilih diikuti oleh "Router". Dua lingkaran putih harus dibuat. Klik pada lingkaran putih pertama dan pilih "Mailgun" diikuti oleh "Kirim email". Di sini, Mailgun digunakan untuk menerima Email dengan suhu. Jika Anda sudah memiliki akun di Mailgun, maka Anda harus memiliki API key dan Nama Domain yang dapat dengan mudah ditemukan di akun Mailgun Anda. Jika Anda tidak memiliki akun di Mailgun, maka Anda dapat mengikuti Langkah Alternatif yang diberikan di bawah ini. Isi rincian yang diperlukan seperti yang diminta. Ketik email penerima (yang merupakan alamat Email Anda). Di bidang "Pengirim", ketik "test@yourdomainname". Di bagian "Konten", kita perlu menulis nilai suhu dan bukan nilai sensor. Untuk mengubah nilai suhu ke nilai sensor kita perlu membagi angka dengan 10,24. Untuk mendapatkan nilai sensor dalam bentuk XXX, kita perlu menghilangkan semua karakter lain yang kita gunakan fungsi "substring". Klik simbol "A" di kotak dialog di samping dan pilih "substring".
Di ruang pertama di dalam tanda kurung, klik opsi "Data" di bawah simbol bintang diikuti oleh "11" dan "14" di ruang kedua dan ketiga. Sebenarnya, ini bukan metode yang tepat untuk mengambil nilai sensor, jadi saya menggunakan peretasan untuk mendapatkannya. Jika seseorang mengetahui cara yang benar, mereka dapat menyebutkan metodenya di bagian komentar di bawah.
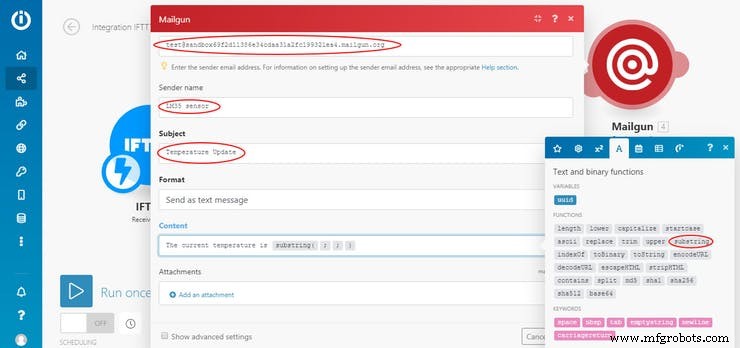
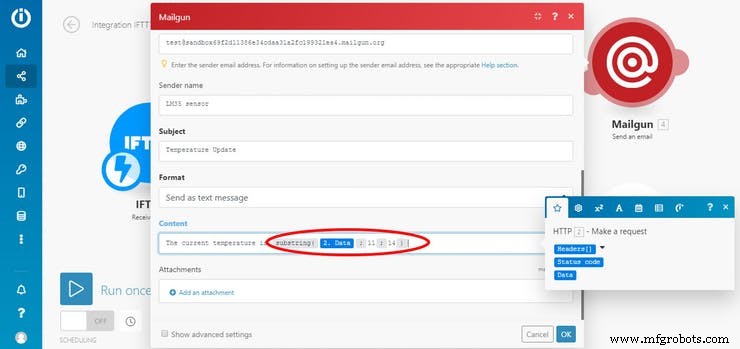
Yang terakhir dilakukan untuk menangkap hanya "XXX" dari output. Angka ini kemudian dibagi dengan 10,24

Sebelum menyimpan skenario, jangan lupa untuk mengaktifkan "Penjadwalan" yang ada di bagian bawah layar dan pilih "Jalankan skenario" sebagai "Segera". Skenario terakhir Anda akan terlihat seperti ini.
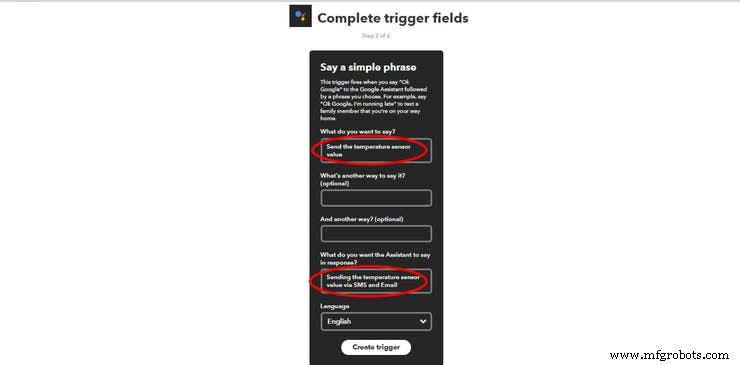
Langkah 6:Membuat Applet baru di IFTTT
Masuk ke akun IFTTT Anda. If you haven't signed up on IFTTT, then you can create an account by clicking here. After logging in, click on "New Applet" under the "My Applets" section. Click on "+this" followed by "Google Assistant" after searching for it in the search box. Click on "Say a simple phrase" in the following screen. Type the command for which you want to trigger the required action.
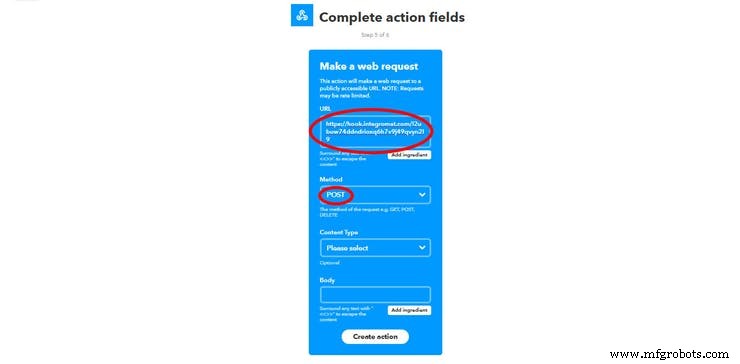
Click on "Trigger" followed by "+that". Search for "Webhooks" in the search box and select it followed by selecting "Make a web request" in the following screen. In the URL field, paste the link which we got in Step 2 after creating an IFTTT module in Integromat. This step is very essential to run the scenario in Integromat when you say the command to Google Assistant. Afterwards, select "POST" in method and click on "Create Action". Write a suitable name for the applet and select "Finish".
Itu dia. Now see the magic when you take out your mobile phone and say "Ok Google, send the temperature sensor value."
Schematics
Connecting female-to-male wires to LM35 sensor
Connecting female-to-male wires to the Bolt WiFi module
Final connection

THAT'S IT NOW UPLOAD EVERY THING AND THEN CHECK.
IF ANY DOUBTS CONTACT ME BY COMMENT SECTION.
THANK YOU....................................
#include#include #include #include #include #include Servo servo;RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int servo_pin =9;int sensor_pin=A0;int output_value;void setup() { Serial.begin(9600); radio.begin(); servo.attach (servo_pin ); radio.openReadingPipe(0, address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.startListening();}int pos;void loop() { if (radio.available()) { radio.read(&pos, sizeof(pos)); Serial.println(pos); if(pos==100) { digitalWrite(6,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(3,RENDAH); // Serial.println("gk0"); } else if (pos==200){ digitalWrite(6,HIGH); digitalWrite(5,LOW); digitalWrite(4,HIGH); digitalWrite(3,RENDAH); penundaan (10); // Serial.println("gk1"); } else if (pos==300){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,LOW); digitalWrite(3,HIGH); penundaan (10); // Serial.println("gk2"); } else if (pos==400){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,HIGH); digitalWrite(3,RENDAH); penundaan (10); // Serial.println("gk3"); } else if (pos==500){ digitalWrite(6,HIGH); digitalWrite(5,LOW ); digitalWrite(4,LOW); digitalWrite(3,HIGH); penundaan (10); // Serial.println("gk5"); } else if (pos==600){ servo.write(90); penundaan (10); // Serial.println("gk6"); } else if (pos==700){ servo.write(180); penundaan (10); // Serial.println("gk7"); } } else { Serial.println("connection lost"); } }
#include#include #include #include #include RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int x_key =A1; int y_key =A0; int p_key =A3; int q_key =A2; int x_pos;int y_pos;int p_pos;int q_pos;void setup() { radio.begin(); radio.openWritingPipe(address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.stopListening(); Serial.begin(9600); pinMode (x_key, INPUT); pinMode (y_key, INPUT); pinMode (p_key, INPUT); pinMode (q_key, INPUT); }int pos;void loop() { x_pos =analogRead (x_key); y_pos =analogRead (y_key); p_pos =analogRead (p_key); q_pos =analogRead (q_key); Serial.println(x_pos); Serial.println(y_pos); Serial.println(p_pos); Serial.println(q_pos); if (p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600) { if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600) { pos=100; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos<400) { pos=200; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos>600) { pos=300; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos<400) { pos=400; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos>600) { pos=500; radio.write(&pos, sizeof(pos)); } Serial.println(pos); delay(100);}else if(p_pos<400 || p_pos>600){ if(p_pos<400) { pos=600; radio.write(&pos, sizeof(pos)); } if(p_pos>600) { pos=700; radio.write(&pos, sizeof(pos)); } delay(100);}}
Proses manufaktur
Komponen dan persediaan Arduino MKR1000 × 1 Klik Lingkungan MikroE × 1 Alat dan mesin yang diperlukan Kabel jumper Adafruit Wanita/Wanita Aplikasi dan layanan online Arduino IDE WolkAbout IoT Platform Tentang proyek ini
Komponen dan persediaan Arduino UNO × 1 Sensor Kedekatan × 1 Kabel jumper (generik) × 1 Tentang proyek ini Halo, teman-teman! Hari ini saya akan menunjukkan kepada Anda bagaimana menghubungkan sensor IR dengan Arduino UNO. Jadi mari kita mulai! Komp
Komponen dan persediaan Arduino MKR GSM 1400 × 1 SORACOM Air Global IoT SIM × 1 Arduino MKR MEM Shield × 1 Suhu dan Kelembaban GY21 × 1 Sensor Sinar UV SI1145 Adafruit × 1 Sensor Kelembaban Tanah SparkFun (dengan Terminal Sekrup) × 1
Komponen dan persediaan Arduino UNO × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 Tentang proyek ini Visualisasi Layar Radar untuk HC-SR04 Kode Arduino: Mengirim pembacaan sensor untuk setiap derajat yang digerakkan oleh nilai servo yang dikirim ke port serial un