Tentang proyek ini
Robot ini - Mofiza- (nama aneh) Dapat MELIHAT, BERBICARA, dan BEreaksi terhadap sekelilingnya. Sebelum saya lanjutkan tonton videonya:
Sejak saya melihat membuat robot yang dapat berbicara, saya melihat bahwa orang sebenarnya menggunakan papan pengembangan lain daripada Arduino untuk membuat robot yang dapat berbicara. Tetapi sangat mungkin untuk membuat robot Humanoid dengan Arduino yang dapat berbicara dan menambahkan banyak servo untuk membuatnya bergerak. Jadi mari kita mulai:
Pembaruan (Cara membuatnya) -
Langkah 1:Bagian yang Anda Butuhkan 

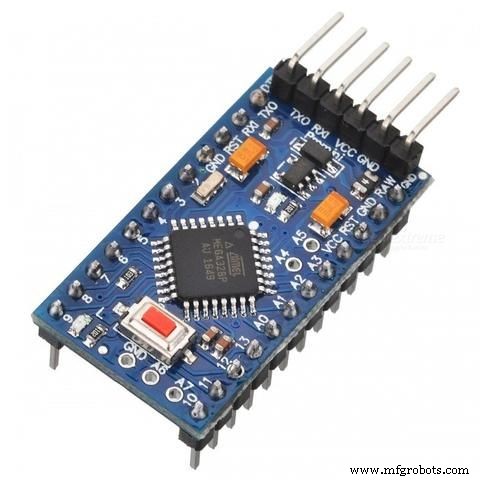
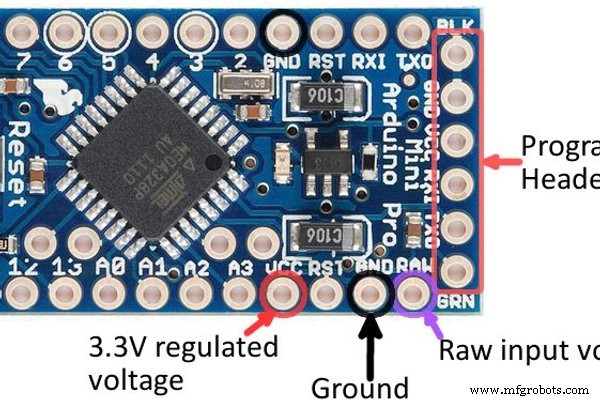
- Arduino Pro mini (5v 16 Mhz) [papan apa saja bagus tapi saya menggunakan ini untuk membuatnya kecil)
- Pin header wanita untuk menghubungkan di pcb
- Papan Vero untuk membuat sirkuit
- Modul TF kartu SD (untuk membuatnya berbicara)
- kartu micro sd (tidak lebih dari 2 GB)
- Motor servo 3x (saya sudah menggunakan servo mikro sg90)
- Karton untuk membuat badan
Langkah 2:Menghubungkan Sensor IR dan Badan 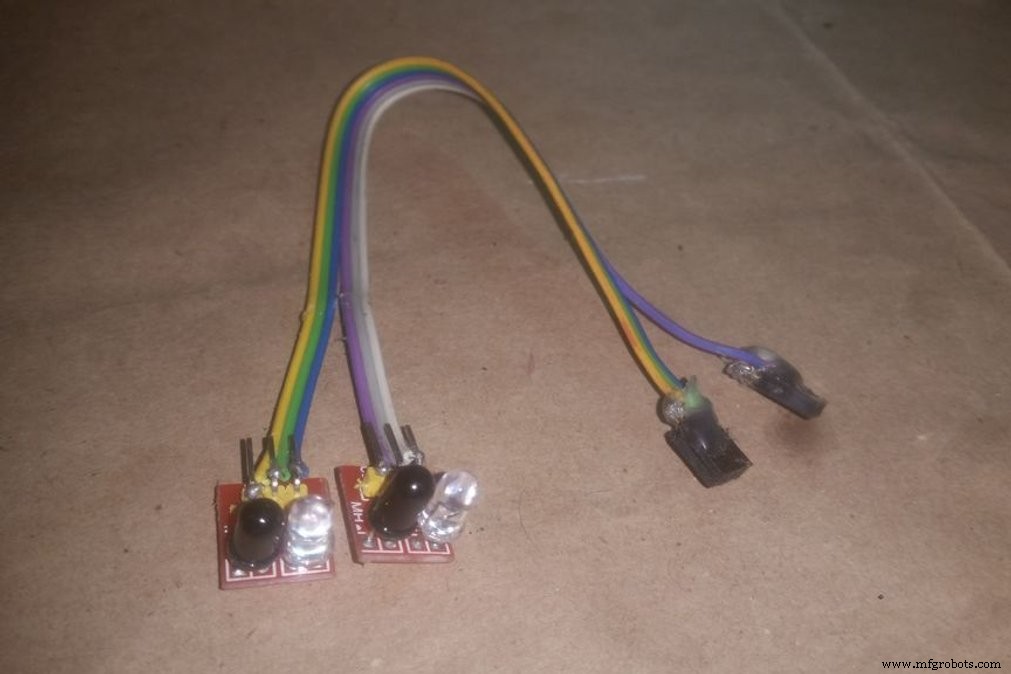

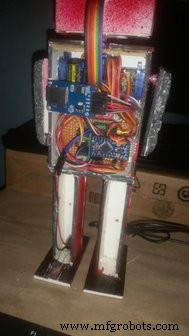
Buat tubuh dengan apa pun yang Anda inginkan, saya telah membuatnya dari karton. Ini cukup sederhana.
Saya telah menyolder sensor IR dengan kabel pita seperti ini dengan header perempuan di satu ujung dan menambahkan dua di dua mata dan satu di dada.
Robot akan mengucapkan pesan selamat datang jika mendeteksi sesuatu di sensor dada dan akan mengatakan "aaaah.. jangan sentuh mata saya" jika ada sensor mata tinggi. dan servo di dalamnya akan bergerak ke atas.
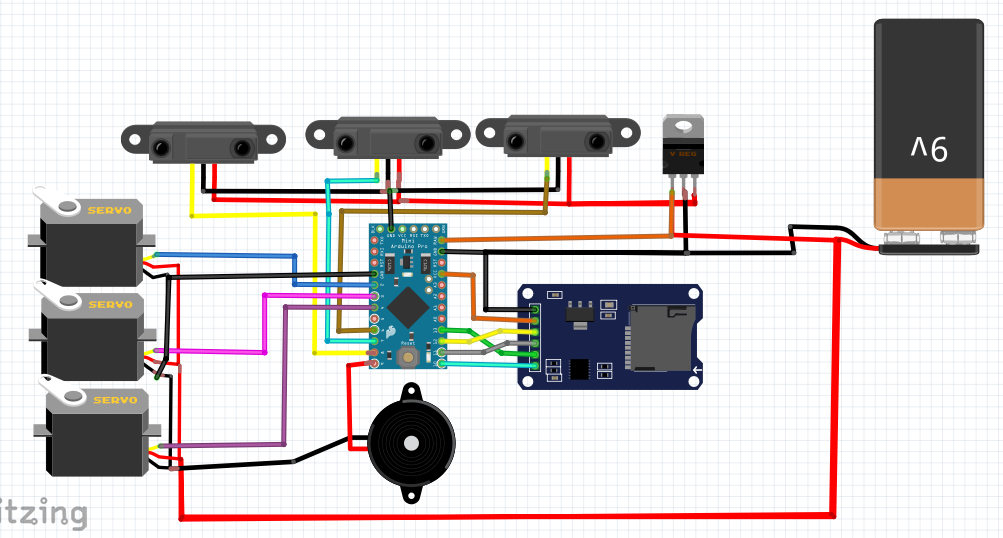
Langkah 3:Sirkuit 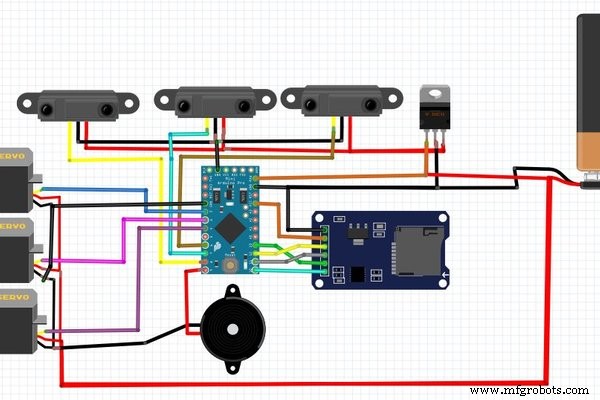
Sirkuitnya terlihat agak rumit tetapi tidak terlalu mudah, Anda cukup menyalakannya dengan satu baterai. solder sirkuit dan semua komponen lain di papan vero dan tambahkan servo lain di kepala dan tangan.
Langkah 4:Kode
Sebelum kode:
Saya harus menggunakan dua perpustakaan untuk robot ini.
TMRpcm.h - untuk memutar audio dari kartu SD- bicara https://github.com/TMRh20/TMRpcm
ServoTimer2.h - hindari konflik dengan TMRpcm dan jalankan motor Servo menggunakan timer2 karena TMRpcm menggunakan Timer1 pada arduino. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
Ini adalah kode untuk mengucapkan selamat datang. Anda dapat membuat lingkungan dan kode Anda sendiri. Sebelum Anda mendapatkan kode, Anda harus menambahkan perpustakaan ServoTimer2. Robot juga tidak akan berjalan.
Dan kemudian ke atas Kode:
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha;ServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;pengaturan batal() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); kembali; }}void loop() { if(!(digitalRead(in3)))) { tmrpcm.play("welcome.wav"); lhand.write(2500); penundaan(2000); lhand.write(1200); //penundaan posisi jabat tangan (9000); } else { lhand.write(300); rhand.menulis(1700); matematika.menulis(1500); }}
Langkah 5:Selesai
Sekarang nyalakan dan selesai. Robot pintar selesai dibuat. [Saya akan segera mengupload gambar dan detail lainnya]
Jika saya bisa mendapatkan lebih banyak pin, saya akan membuat robot itu berjalan. tapi saya hanya punya 3 pin tersisa (digital). Ini kurang dari yang saya butuhkan.
Dukung saya dengan Berlangganan ke saluran YouTube saya.
Kode
mofiza.welcome.codeC/C++
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha; //matha berarti HEADServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); kembali; }}void loop() { if(!(digitalRead(in3)))) { tmrpcm.play("welcome.wav"); lhand.write(2500); penundaan(2000); lhand.write(1200); //penundaan posisi jabat tangan (9000); } else { lhand.write(300); rhand.menulis(1700); matematika.menulis(1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robot Skema