

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 |
 |
| |||
| ||||
|
 |
|
Robot pengikut garis adalah halo dunia untuk arena robotika. Pengikut baris ini sangat sederhana, mudah untuk membuat robot.
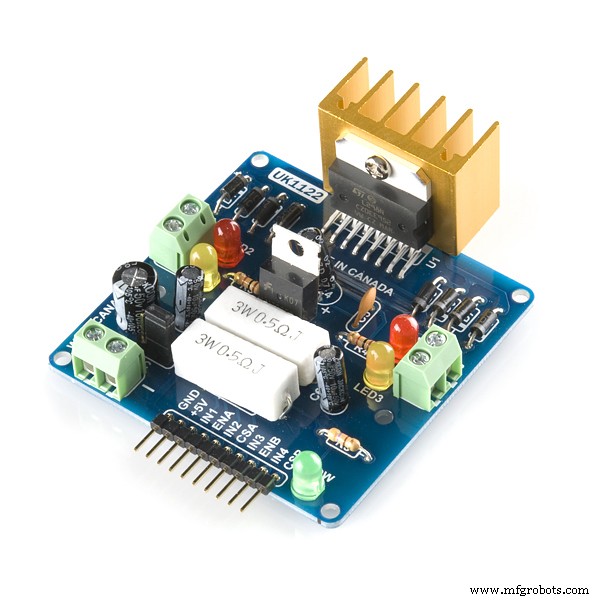
/*-------menentukan Input------*/#define LS 2 // sensor kiri#define RS 5 // sensor kanan/*-------mendefinisikan Output- -----*/#define LM1 11 // motor kiri#define LM2 10 // motor kiri#define RM1 9 // motor kanan#define RM2 6 // setup motorvoid kanan(){ pinMode(LS, INPUT); pinMode(RS, INPUT); pinMode(LM1, OUTPUT); pinMode(LM2, OUTPUT); pinMode(RM1, OUTPUT); pinMode(RM2, OUTPUT);}void loop(){if((digitalRead(LS)==LOW) &&(digitalRead(RS)==LOW)) // Kondisi_1 stop{ MoveForward(); } if((DigitalRead(LS)==HIGH) &&(digitalRead(RS)==HIGH)) //CONDITION-2 FORWRD { Stop(); } if((digitalRead(LS)==LOW) &&(digitalRead(RS)==HIGH)) // KANAN { TurnLeft(); } if((digitalRead(LS)==HIGH) &&(digitalRead(RS)==LOW)) { TurnRight(); }}void MoveForward(){ analogWrite(LM1, 50); analogWrite(LM2, 0); analogWrite(RM1, 50); analogWrite(RM2, 0); delay(20);}void TurnRight(){ analogWrite(LM1, 0); analogWrite(LM2, 60); analogWrite(RM1, 60); analogWrite(RM2, 0); penundaan (30); }void TurnLeft(){ analogWrite(LM1, 60); analogWrite(LM2, 0); analogWrite(RM1, 0); analogTulis(RM2, 60); delay(30);}void Stop(){ analogWrite(LM1, 0); analogWrite(LM2, 0); analogWrite(RM1, 0); analogWrite(RM2, 0); delay(20);} 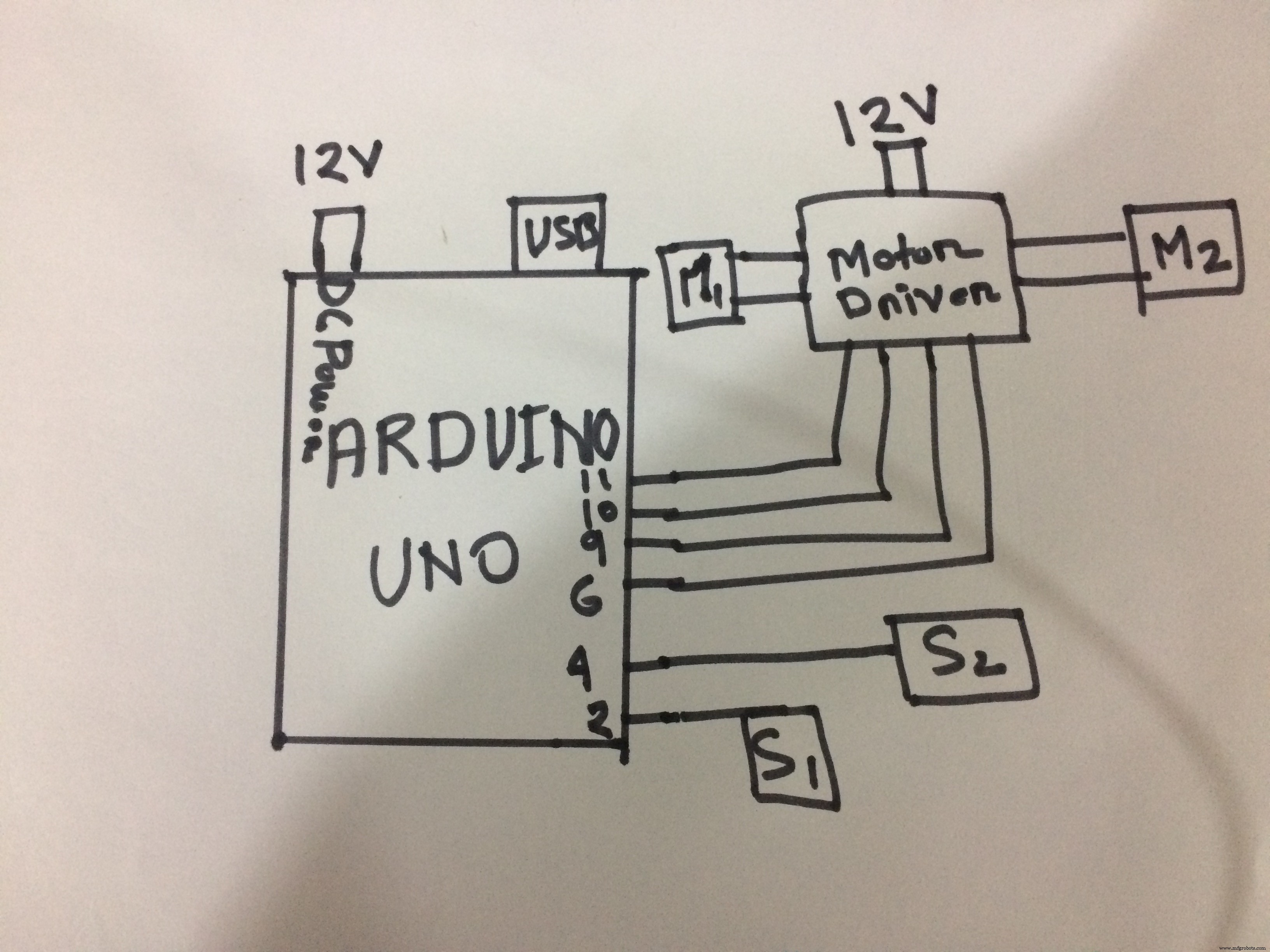
Proses manufaktur
Komponen dan persediaan LED (generik) × 10 Arduino UNO × 1 Resistor 221 ohm × 10 Kabel jumper (generik) × 13 Potensiometer putar (generik) × 1 Aplikasi dan layanan online Arduino IDE Tentang proyek ini Ada sepuluh LED
Komponen dan persediaan Arduino Nano R3 × 1 Potensiometer putar (generik) × 7 Sakelar Tombol Tekan SparkFun 12mm × 7 port MIDI × 1 Resistor 221 ohm × 4 LED (generik) × 2 Tentang proyek ini Pembaruan 11.03.2019 Hai, Saya
Dalam tutorial ini kita akan belajar bagaimana membangun Robot Roda Arduino Mecanum yang mampu bergerak ke segala arah. Mobilitas unik robot ini dicapai dengan menggunakan roda jenis khusus, yang disebut Roda Mecanum. Anda dapat menonton video berikut atau membaca tutorial tertulis di bawah ini. R
Dalam tutorial ini saya akan menunjukkan kepada Anda bagaimana saya membangun sebuah hexapod Arduino. Seperti namanya, hexapod memiliki 6 kaki tetapi selain itu, ia juga memiliki ekor atau perut, kepala, antena, rahang bawah, dan bahkan mata yang berfungsi. Semua ini membuat hexapod terlihat seperti