7 Sumber Daya Untuk Memahami Ketidakcocokan Inersia dan Inersia
Saat menentukan ukuran motor yang paling tepat untuk aplikasi tertentu, faktor-faktor seperti inersia beban dan inersia motor merupakan pertimbangan penting. (Via:Memahami Misteri Ketidakcocokan Inersia’)
Jika komponen mekanis seperti kopling, poros, dan sabuk sangat kaku, akan memungkinkan untuk mengukur motor hanya berdasarkan persyaratan torsi dan kecepatan. Sayangnya, ini tidak terjadi.
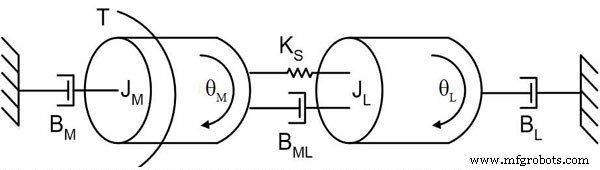
Dalam motor dan beban yang dikopel secara sesuai, sejumlah faktor memengaruhi resonansi mekanis sistem, termasuk inersia rotor motor (JL ), inersia beban (JL ), elastisitas kopling (KS ), torsi yang diterapkan (T), dan peredam kental kopling (BML ), antara gound dan rotor (BM ) dan antara tanah dan beban (BL ). Gambar milik Kevin Craig, Universitas Hofstra.
Setiap komponen mekanis ini memiliki tingkat kesesuaian, yang berarti bahwa ketika motor mencoba memindahkan beban, getaran menghasilkan frekuensi resonansi. Ukuran motor yang sukses membutuhkan pemahaman tentang inersia, jadi mari kita lihat beberapa konsep kunci.
Inersia adalah resistensi objek fisik apa pun terhadap perubahan kecepatannya. Saat inersia meningkat, demikian juga resistensi terhadap akselerasi/deselerasi. Inersia beban, juga disebut sebagai momen inersia, didefinisikan sebagai resistensi objek fisik terhadap perubahan kecepatan apa pun, dari perspektif sumbu rotasi .
Momen inersia (biasanya ditulis sebagai J ) dalam sistem servo dapat dibagi menjadi dua bagian:inersia beban dan inersia motor. Rasio momen inersia adalah momen inersia beban dibagi dengan momen inersia motor. Ketidakcocokan inersia mengacu pada perbedaan kelembaman fisik antara motor dan beban.
Untuk membantu menentukan ukuran motor, pembuat motor biasanya memberikan informasi inersia beban yang diizinkan. Melebihi beban yang diizinkan dapat menyebabkan penurunan kinerja, getaran, dan kemacetan.
Perlu diingat bahwa tidak ada rumus untuk menghitung beberapa rasio inersia ideal – ini harus dihitung untuk setiap aplikasi.
Rasio inersia beban-ke-motor yang tinggi mengurangi bandwidth pengoperasian alat berat, membuat motor bekerja lebih keras dari yang seharusnya, dan sering kali menyebabkan waktu pengendapan yang meningkat, yang mengakibatkan penurunan kinerja keseluruhan.
Salah satu cara untuk mengurangi rasio inersia adalah dengan menggunakan gearbox karena rasio roda gigi memiliki efek kuadrat terbalik pada inersia beban. Hal ini memungkinkan operasi berkecepatan lebih tinggi dan/atau motor yang lebih kecil dan lebih murah. Pendekatan lain adalah beralih ke motor yang lebih besar dengan inersia yang lebih besar.
Selain itu, servo canggih saat ini hadir dengan algoritme kontrol drive yang dapat digunakan untuk mengatasi efek resonansi, yang memungkinkan penggunaan sistem dengan rasio lebih tinggi untuk aplikasi tertentu.
Inersia rotor dapat disesuaikan melalui perubahan material, dimensi, dan desain (seperti desain 'roda mobil' yang ditampilkan di sini). Kredit:A3
Berikut adalah 7 sumber daya yang berguna untuk menjelajahi topik ketidakcocokan inersia dan inersia:
- Memahami Misteri Ketidakcocokan Inersia:Artikel mendalam dari arsip A3 ini memberikan rincian topik yang terperinci, termasuk persamaan. Berfokus pada bagaimana inersia dan kekakuan kopling bergabung untuk menciptakan ketidakstabilan dalam operasi sumbu servo – dan bagaimana masalah ini dapat diselesaikan.
- Dasar-dasar Penentuan Ukuran Motor Servo:Seri Modul eLearning terkait robotika online gratis yang sangat baik dari Yaskawa America mencakup video ini yang mencakup konsep ukuran motor inti seperti torsi puncak, torsi RMS, rasio inersia , dan kecepatan.
- Video Inersia Akademi Robot:Akademi Robot online gratis dari Queensland University of Technology menyediakan beberapa video yang mengeksplorasi topik inersia dalam kontrol gerak dan konteks robotika yang berbeda.
- Dasar-dasar Ukuran Motor:Inersia Beban:Panduan ringkas tentang topik inersia dari produsen motor terkemuka Oriental Motor.
- Kalkulator Rasio Inersia Online:Destaco telah menyediakan alat online berguna yang dirancang untuk membantu Anda menghitung rasio inersia.
- Memahami Rasio Inersia dan Pengaruhnya Terhadap Performa Mesin:Buku putih luar biasa dari Mitsubishi Electric yang menjelaskan dasar-dasar rasio inersia dan bahaya mengikuti aturan praktis saat mengukur motor.
- Solusi untuk Mengurangi Resonansi Motor Stepper:Tahukah Anda bahwa dengan menyetel motor dan/atau mengubah inersia beban, Anda dapat mengurangi resonansi motor stepper? Cari tahu lebih lanjut di artikel ini dari arsip A3.


