Kopling Sumbu Robot Dapat Merusak Produksi Anda
Sekitar 10% -20% robot memiliki fitur yang kurang diketahui ini. Ini dapat mengacaukan pemrograman Anda jika Anda tidak siap.
Saya belajar tentang konsep robotika baru tempo hari… kopling sumbu robot.
CEO RoboDK Albert Nubiola memberi tahu saya:“Kopling sumbu robot penting untuk pemrograman robot, tetapi tidak banyak pengguna yang menyadarinya dan sering bingung.”
Dia benar! Ada sangat sedikit yang ditulis tentang kopling sumbu. Terlebih lagi, terlepas dari kenyataan bahwa saya telah menjadi ahli robotika selama hampir satu dekade, saya tidak pernah mengetahui fitur yang sedikit tidak biasa ini.
Jika Anda belum pernah mendengar tentang kopling sumbu robot, jangan khawatir. Anda tidak sendirian.
Kopling sumbu bukanlah fitur yang buruk. Bahkan, ia memiliki beberapa manfaat. Tapi, itu dapat mempengaruhi pemrograman Anda jika Anda tidak siap untuk itu. Albert memperkirakan bahwa antara 10-20% robot industri dipengaruhi oleh kopling sumbu.
Apa itu Kopling Sumbu?
Kopling sumbu adalah ketika dua atau lebih sambungan robot dihubungkan bersama. Mereka dapat ditautkan secara fisik, dengan tautan paralel, atau ditautkan dalam perangkat lunak kontrol.
Berikut adalah deskripsi dari axis coupling dalam prakteknya…
No Axis Coupling:Kebanyakan 6 Robot DoF
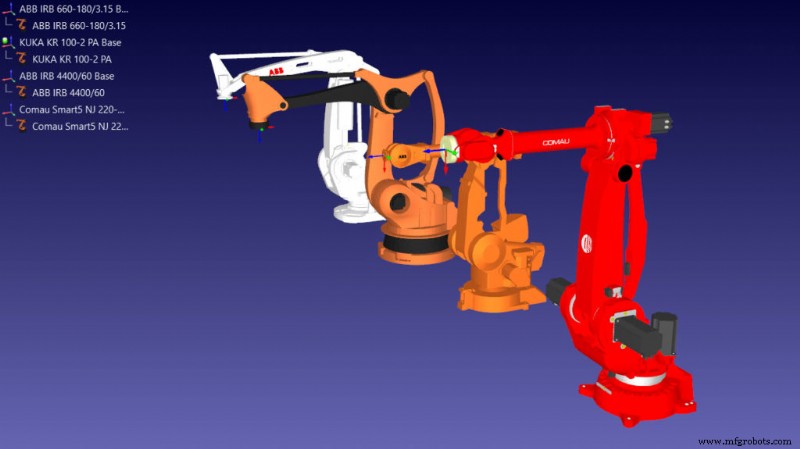
Pertama, mari kita lihat robot industri klasik 6 Derajat Kebebasan (DoF), misalnya, Comau Smart NJ 16-3.1
Untuk sebagian besar robot 6 DoF modern, hal berikut ini berlaku:
- Setiap sendi independen secara fisik.
- Setiap sendi dapat dikontrol secara independen tanpa mempengaruhi sendi lainnya.
- Motor untuk setiap sambungan terletak pada sambungan itu sendiri.
Untuk sebagian besar 6 robot DoF, tidak ada kopling sumbu. Ini membuat kontrol menjadi sangat sederhana — jika Anda memindahkan sambungan (mis. Sambungan 3) dengan jumlah tertentu, hanya sambungan itu yang akan bergerak.
Kopling Sumbu:Beberapa robot
Mari kita lihat robot yang memiliki kopling sumbu:Comau Smart5 NJ-165-3.0
Comau memproduksi beberapa robot yang memiliki axis coupling. Ini adalah salah satu model robot 6 DoF dengan kopling sumbu. Semua robot pembuat palet Comau juga memiliki fitur ini.
Berikut ini berlaku untuk robot ini:
- Motor untuk Sambungan 2 dan 3 keduanya terletak di dasar robot.
- Sambungan 3 digerakkan oleh mekanisme tautan paralel yang secara fisik menghubungkan dua sambungan.
- Saat Sendi 2 digerakkan, Sendi 3 juga bergerak, dan sebaliknya.
Ini sedikit mempengaruhi kontrol dan pemrograman robot ini. Biasanya, Anda memprogram robot 6 DoF dengan mengirimkan 6 nilai, masing-masing sesuai dengan posisi 6 sambungan yang diinginkan. Dengan kopling sumbu, ini menjadi lebih sulit karena dua sambungan robot bergantung.
Manfaat Besar Kopling Sumbu:Muatan Tinggi
Jika kopling sumbu sangat bermasalah, mengapa menggunakannya sama sekali?
Ada satu keuntungan besar menggunakan robot yang digabungkan dengan sumbu dibandingkan robot 6 DoF tradisional dalam beberapa situasi:Muatan tinggi.
Mari kita ambil Comau NJ-165 (sumbu digabungkan) dan NJ-16 (tradisional 6 DoF) sebagai contoh:
| |
Smart NJ-1-3.1 |
Smart 5 NJ-165-3.0 |
|
Ketik | Tradisional 6 DoF
| Sumbu Terpasang 6 DoF |
|
Jangkauan | 3,11 m | 3,00 m |
|
Pengulangan | 0,1 mm | 0,1 mm |
|
Muatan | 16kg | 165kg |
|
Berat | 680kg | 1240 kg |
Seperti yang Anda lihat, kedua robot ini sangat mirip dalam jangkauan dan pengulangannya. Namun, dalam hal muatan, keduanya sangat berbeda.
Robot dengan kopling sumbu memiliki kapasitas muatan lebih dari 10 kali lipat dari robot 6 DoF tradisional!
Ini sangat masuk akal. Sebagian besar kapasitas muatan robot berasal dari motor di Sambungan 2 dan 3. Biasanya, motor di Sambungan 2 juga harus menopang beban berat dari motor Sambungan 3 yang kuat. Dengan menambahkan motor ini ke dasar robot, memungkinkan Comau untuk membuat struktur lebih besar dan lebih kuat tanpa memerlukan motor yang terlalu kuat di Joint 2.
Jenis robot apa yang menggunakan kopling sumbu?
Ada tiga jenis utama robot yang menggunakan kopling sumbu:
- Robot membuat palet — Banyak robot pembuat palet memiliki kopling sumbu karena memungkinkan mereka memiliki muatan yang lebih tinggi.
- Payload tinggi 6 robot DoF — Robot dengan muatan tertinggi dari Comau, Fanuc, dan ABB semuanya memiliki kopling sumbu untuk membantu mereka mengangkat muatan yang lebih tinggi. Beberapa (misalnya KUKA IRB 8700-800/3.50 dengan muatan 800 kg) bahkan memiliki penyeimbang yang terpasang pada tautan paralel untuk mengimbangi muatan berat.
- Robot tipis — Beberapa robot tipis menggunakan kopling sumbu untuk memperhitungkan struktur tipisnya.
Bagaimana cara mengetahui apakah robot Anda memiliki kopling sumbu
Menemukan apakah robot Anda menggunakan kopling sumbu tidak selalu mudah… kecuali Anda menggunakan RoboDK.
Sepengetahuan kami, RoboDK adalah satu-satunya perangkat lunak agnostik merek yang dapat secara akurat menjelaskan kopling sumbu.
Anda dapat melihat apakah robot Anda memiliki kopling sumbu di RoboDK dengan 2 cara:
- Pindahkan Sendi 2 atau 3 di panel robot dan lihat apakah sendi lainnya bergerak.
- Klik dua kali pada nilai batas gabungan dari Sambungan 2 atau 3 untuk membuka jendela pemetaan kopling sumbu (interaksi Sumbu 2 vs Sumbu 3).
Di beberapa robot, mudah untuk mengatakan bahwa robot memiliki kopling sumbu karena Anda dapat melihat hubungan paralel mulai dari dasar robot hingga ke Sambungan 3. Selain itu, tidak ada motor yang terpasang di Sambungan 3, juga di dasar.
Beberapa robot juga memiliki kopling girboks antara Sambungan 5 dan 6.
Beberapa petunjuk merek robot tertentu
Dari pengalaman kami menggunakan robot, berikut adalah beberapa petunjuk tentang 3 merek robot:
- FANUC menggunakan kopling sumbu pada semua model, bahkan model tanpa hubungan fisik tempat kopling diterapkan dalam perangkat lunak.
- ABB juga menyediakan pemetaan detail pada beberapa robot dengan kopling sumbu.
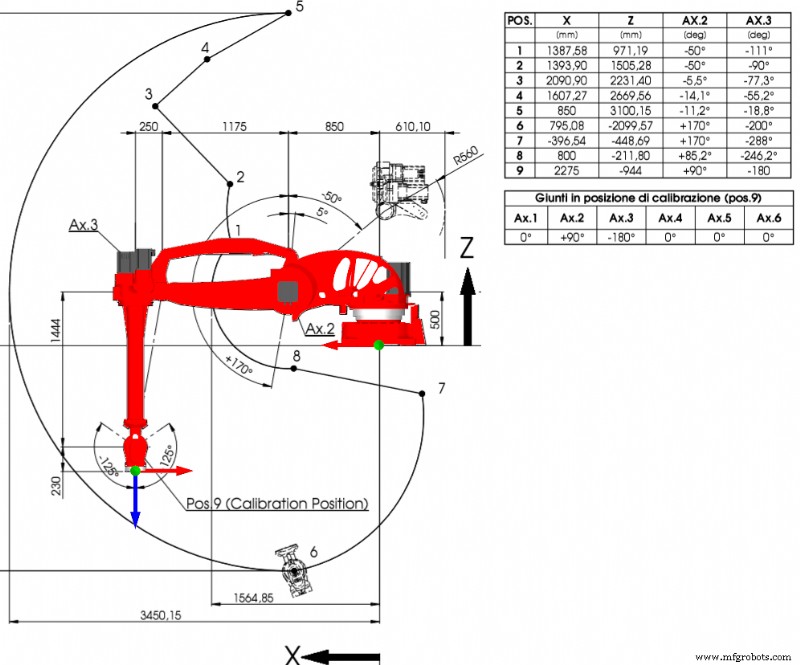
- Comau memberikan pemetaan rinci tentang kopling sumbunya di semua lembar data robot. Misalnya, lihat batas peta gabungan (sumbu 2 dan 3) untuk berbagai posisi robot pada lembar data ini. Beberapa robot mereka juga memiliki "zona mati" di mana satu sambungan menjadi terbatas karena kopling sumbu. Ruang kerja yang dijelaskan memungkinkan untuk secara akurat memodelkan dan menampilkan interaksi sebagai bagan Gabungan 2 vs. Gabungan 3.
Jadi, buka model robot Anda di RoboDK dan cobalah untuk mengetahui apakah ia memiliki kopling sumbu.
Jika demikian, ketahuilah bahwa RoboDK akan menangani semuanya untuk Anda dan kopling sumbu tidak akan mengacaukan pemrograman Anda!


