Gangguan sinyal membahayakan keselamatan radar otomotif
Masalah keamanan radar yang tidak terlalu diperhatikan muncul sebagai kelemahan potensial dari bantuan pengemudi dan kendaraan yang sangat otomatis:sinyal radar saling mengganggu.
Radar telah menjadi modalitas penginderaan penting yang melengkapi kamera pencitraan CMOS. Radar bekerja di segala kondisi cuaca dan memungkinkan berbagai fitur mengemudi otomatis, termasuk rem darurat otomatis (AEB). Tapi radar bisa digagalkan atau rusak jika akhirnya, seperti akselerator partikel Ghostbusters, saling melintasi arus.
“Ada sesuatu yang sangat penting yang saya lupa untuk memberitahu Anda. Jangan melewati arus. Itu akan buruk.”
Meskipun ini belum menjadi fenomena yang secara publik diperingatkan oleh pembuat mobil atau umumnya dirasakan oleh pengemudi, radar otomotif, yang beroperasi di lingkungan yang padat, akan menghadapi gangguan yang signifikan.
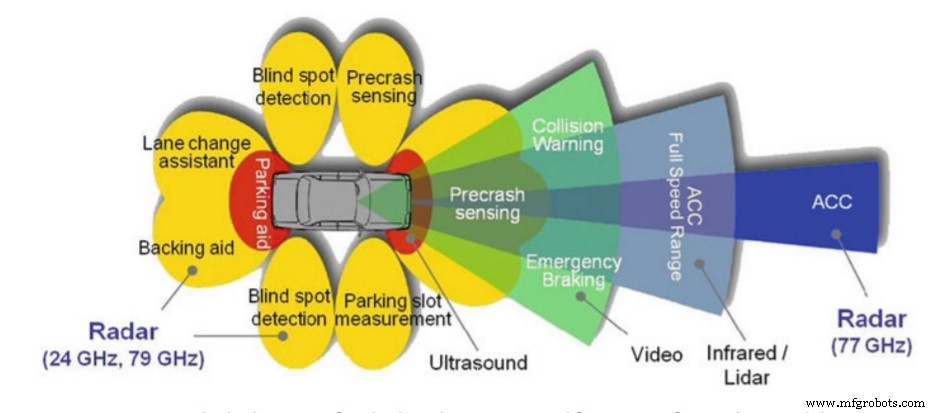
Segmen aplikasi Radar berkisar dari kontrol jelajah adaptif dan deteksi titik buta hingga sistem peringatan tabrakan depan dan bantuan taman cerdas. Agar kendaraan mendapatkan tampilan 360 derajat, diperlukan chip radar jarak pendek dan jarak jauh. AEB biasanya menggunakan radar (semua cuaca) dan terkadang lidar serta kamera untuk mendeteksi tabrakan yang akan segera terjadi.
Perkembangan pesat AEB di pasar global telah menjadi pedang bermata dua bagi pemasok sensor radar. Ini adalah penyebab perayaan dan sumber kekhawatiran.
Misalnya, China New Car Assessment Program (NCAP) sudah mengamanatkan AEB untuk semua truk yang keluar dari pabrik ke pasar pada 2020. Mobil baru di Jepang harus memiliki fungsi AEB depan dan belakang, mulai tahun ini. Di Amerika Serikat, 20 pembuat mobil telah menyetujui "tingkat kecocokan AEB 100 persen untuk mobil baru pada tahun 2022." Menghadapi persyaratan Euro NCAP 2019, 90 persen mobil yang dijual di Eropa telah dilengkapi dengan teknologi penghindaran tabrakan terbaru untuk benturan antar mobil.
NXP Semiconductors memproyeksikan tingkat penetrasi radar otomotif melonjak hingga 55 persen pada 2030. Dalam wawancara baru-baru ini dengan EE Times , Huanyu Gu, manajer pemasaran produk senior NXP Semiconductors yang bertanggung jawab untuk ADAS dan V2X, memperingatkan bahwa gangguan radar tidak dapat dihindari, dengan mengatakan bahwa “ketika beberapa radar memancarkan pada waktu yang sama dan dalam frekuensi yang sama atau tumpang tindih, dan jika mereka kemudian berbagi jalur yang terlihat.”
Gu NXP tidak sendirian dalam kekhawatiran. Martin Duncan, manajer umum ADAS dan divisi ASIC dari ST Microelectronics, juga mengatakan kepada EE Times , “Fakta bahwa kami sekarang memiliki 25% kendaraan baru dengan sistem radar, itu sudah menjadi masalah. Jika Anda mencoba menangkap kondisi jalan secara real time, sangat mudah untuk melihat transmisi dari beberapa kendaraan. Karena kita semua menggunakan pita frekuensi yang sama, hal ini berpotensi memburuk seiring dengan meningkatnya tingkat kecocokan.”
Contoh penerapan beberapa sensor radar yang digunakan untuk keselamatan aktif dan sistem mengemudi berbantuan (Kissinger, 2012)
Prinsip kemacetan radar sangat mudah. Administrasi Keselamatan Lalu Lintas Jalan Raya Nasional (NHTSA) menulis dalam “Studi Kemacetan Radar” yang dikeluarkan pada September 2018:
Radar menggunakan pengetahuan tentang sinyal yang dipancarkan untuk mengidentifikasi gema dan memperkirakan jangkauan dan kecepatan objek di lingkungan. Gema ini bukan salinan sempurna dari sinyal asli, tetapi sejumlah pengembalian berganda yang secara konstruktif dan destruktif mengganggu sinyal. Penting untuk dipahami bahwa pengembalian dari objek yang diterangi oleh radar berfluktuasi, terutama ketika rentang relatif, aspek, dan objek lain dalam pemandangan berubah. Dengan beberapa radar yang beroperasi dalam jarak dekat dan lingkungan dengan berbagai sumber hamburan, kinerja setiap radar menurun saat tingkat interferensi meningkat.
Itu bisa menyebabkan keamanan yang dikompromikan. “Skenario terburuk adalah kematian yang disebabkan oleh gangguan radar. Sudah ada peningkatan penggunaan penyaringan terhadap positif palsu di tumpukan radar hari ini, terlepas dari akar penyebabnya, ”kata pendiri dan presiden VSI Labs Phil Magney.
Industri telah diperingatkan
Semakin banyak mobil yang dilengkapi radar menghantam jalan, semakin cepat setiap radar harus belajar menghadapi kehadiran radar lain. Pemasok radar berada di bawah tekanan.
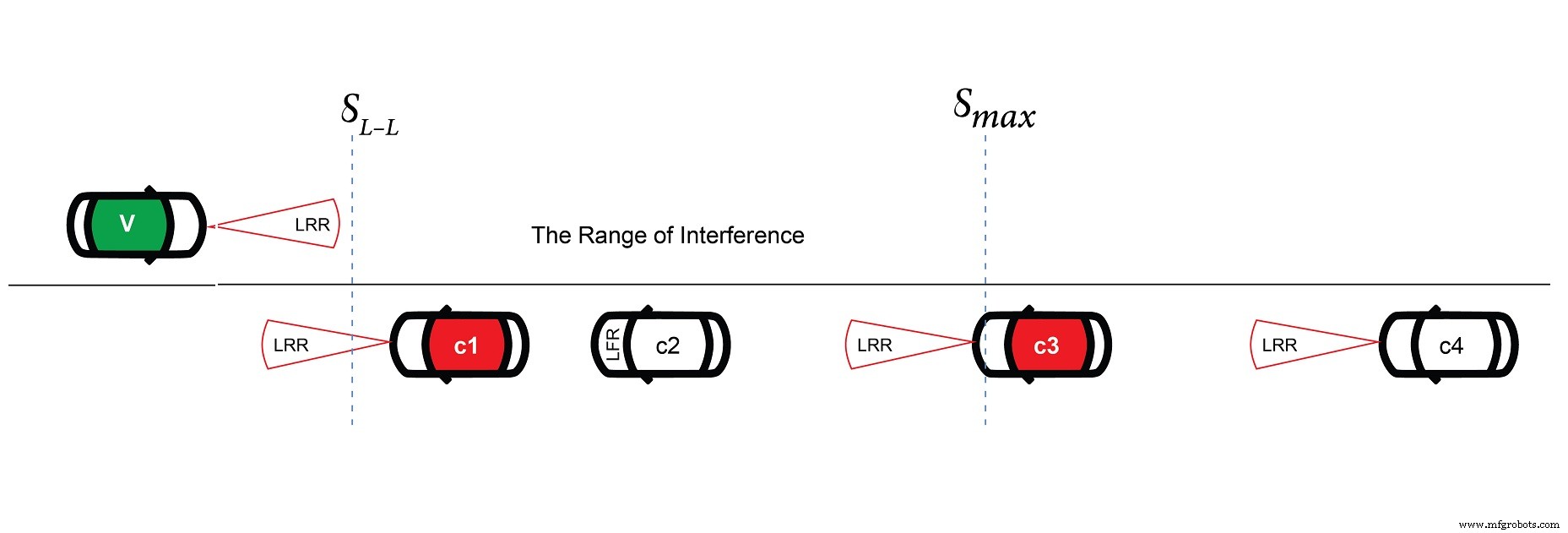
Skenario lalu lintas umum sederhana di mana gangguan dihitung pada radar korban (hijau) dan dihasilkan oleh kendaraan lain (merah)3. (Sumber:NXP)
Interferensi radar bukanlah konsekuensi tak terduga dari proliferasi radar. Industri otomotif telah diperingatkan. Lebih dari satu dekade yang lalu, Eropa menyusun sebuah proyek yang disebut MOSARIM (Lebih Aman untuk Semua oleh Mitigasi Interferensi Radar) dan mengeluarkan laporan pada tahun 2012. Proyek ini menyelidiki “gangguan radar kendaraan bersama dan definisi serta elaborasi penanggulangan yang efektif dan teknik mitigasi. ”
Baru-baru ini, NHTSA melakukan “Studi Kemacetan Radar”, memodelkan dan mensimulasikan interferensi radar dengan mempertimbangkan dua pertanyaan:
Berapa banyak daya yang diterima radar tertentu dari pemancar radar lain?
Bagaimana pengaruhnya terhadap kinerja sistem peringatan tabrakan?
Laporan menyimpulkan:
…Sistem yang beroperasi dengan baik di lingkungan dengan sedikit radar lain dapat mengalami penurunan kinerja yang signifikan di lingkungan yang padat radar. Hasil studi menunjukkan, tingkat interferensi berdasarkan pengoperasian sistem saat ini di lingkungan yang padat akan signifikan. Dalam skenario dengan banyak kendaraan yang mengoperasikan radar di pita 76-81 GHz, kekuatan dari radar lain kemungkinan akan melebihi kekuatan gema dari target yang diperlukan untuk kinerja tertentu, beberapa kali lipat.
Kolaborasi antar radar?
Jadi, industri telah mengetahui selama satu dekade tentang bahaya lalu lintas radar yang akan segera terjadi. Tindakan apa yang telah diambil?
Dengan semua waktu tunggu ini, Anda mungkin mengharapkan OEM mobil dan Tier 1 mengembangkan strategi yang kuat untuk menghindari gangguan. Anda mungkin membayangkan sensor radar yang menghindari interferensi dengan mengadaptasi parameter bentuk gelombang secara dinamis.
Ini bukan ilmu roket. Komunitas radar memiliki pengetahuan untuk meminjam jenis aturan akses saluran serupa yang telah digunakan oleh industri telekomunikasi (seperti di TDMA, FDMA, dan CDMA). Skema “dengarkan sebelum bicara” seperti itu seharusnya memungkinkan komunikasi yang lebih terstruktur di antara radar, kata Gu NXP.
Sayangnya, itu bukan mitigasi interferensi yang diadopsi oleh industri. Selain fakta bahwa radar otomotif menggunakan spektrum frekuensi yang dialokasikan sama (76GHz~81GHz), komunitas radar tidak berada di bawah peraturan. “Parameter bentuk gelombang radar tidak diatur,” kata Gu.
Perjanjian, standarisasi, dan regulasi industri tidak pernah menjadi bagian dari DNA industri otomotif.
Pendekatan umum yang diadopsi saat ini adalah "untuk membatasi interferensi dengan mengacak sinyal yang ditransmisikan baik dalam waktu atau frekuensi," menurut Gu. Mengakui ketidaklogisan di balik pengacakan ini, Gu berkata, “Hari ini, kamu melakukan ini secara membabi buta. Ini tentu baik-baik saja terutama jika tidak banyak mobil di jalan dengan radar. Namun jika Anda ingin meningkatkan ketahanan sensor radar terhadap gangguan, Anda harus mencari kolaborasi di antara sensor radar.”
Tapi itu membutuhkan regulasi.
Meskipun demikian, dalam buku putihnya sendiri tentang gangguan radar, NXP menyimpulkan:
Pada akhirnya, untuk mendukung penetrasi pasar yang tinggi, beberapa bentuk kesepakatan antara produsen akan diperlukan untuk berbagi sumber daya penginderaan secara lebih efektif dengan cara yang adil. Langkah terakhir ini berarti bahwa semua pemain di pasar harus duduk bersama untuk menentukan cara standar untuk mengakses saluran sementara pada saat yang sama mempertahankan kemungkinan untuk memiliki kinerja penginderaan yang berbeda.
Gratis untuk semua
Radar selalu menjadi "gratis untuk semua," kata Egil Juliussen, seorang analis industri otomotif veteran independen. Dalam mengejar inovasi, perusahaan sensor radar biasanya cenderung mengembangkan algoritme kepemilikan baru yang berjalan pada DSP atau MCU yang terkait dengan chip sensor sehingga radar mereka dapat meningkatkan resolusi pencitraan dan mengurangi interferensi, jelasnya.
Dengan kata lain, bagi banyak orang di industri otomotif, membuang lebih banyak pemrosesan sinyal pada masalah interferensi radar adalah pendekatan yang lebih disukai daripada perjanjian atau peraturan industri mana pun.
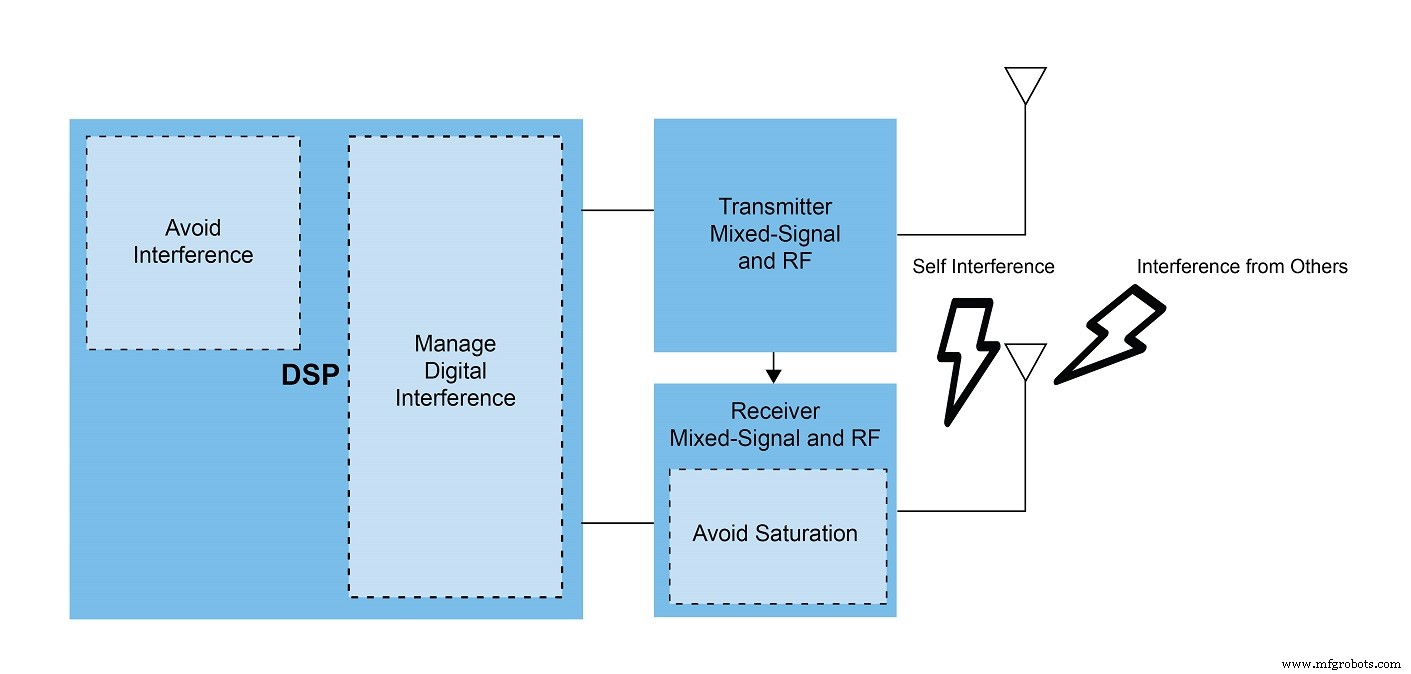
Sebuah sensor radar dengan bagian digital (DSP), pemancar dan penerima front-end. Teknik interferensi dapat dikelompokkan dalam teknik yang dirancang untuk menghindari kejenuhan front-end, teknik yang mengelola interferensi secara digital, dan teknik yang berusaha menghindari interferensi sebelum benar-benar terjadi. (Sumber:NXP)
Selama wawancara kami, Gu NXP mengajukan tiga pendekatan berbeda untuk mitigasi interferensi radar:1) menghindari saturasi di front-end; 2) mengelola interferensi digital dengan mengenali dan menghilangkan interferensi dalam domain digital; 3) menghindari interferensi dengan mengadaptasi parameter bentuk gelombang secara dinamis.
Pendekatan ketiga sudah dianggap paling tidak mungkin untuk diadopsi dalam spektrum 77GHz saat ini. Gu menjelaskan, “Orang-orang berpikir sudah terlambat karena kita sudah memiliki terlalu banyak sensor radar di jalan, dan sensor itu tidak akan bekerja sama.” Dia menambahkan bahwa skema tersebut dapat “diterapkan pada frekuensi 140Ghz di masa depan, jika pita itu tersedia untuk radar.”
Pendekatan pertama — lebih mungkin — adalah merancang teknik yang menghindari kejenuhan ujung depan. Di sini, setidaknya sebagian dari sinyal yang diinginkan dapat diterima, dan tindakan pencegahan yang tepat diambil. “Anda dapat melakukan ini dengan menyediakan penerima radar dengan dua pengaturan penguatan yang berbeda,” kata Gu. Sebagai alternatif, sistem dapat mencakup "pengurangan spasial", di mana ujung depan menggunakan beberapa antena untuk membutakan dirinya sendiri ke arah yang menghasilkan interferensi. Pendekatan ini berusaha menghilangkan sinyal yang mengganggu sebelum memenuhi front-end, jelas Gu.
Pemasok chip radar seperti NXP cenderung berfokus pada penanganan interferensi di domain digital – di DSP. “Tentu saja, prasyaratnya adalah sebenarnya sinyal yang diinginkan tidak terkubur oleh sinyal yang kuat,” kata Gu.
Setelah menentukan bahwa sinyal interferensi relatif lemah, sinyal tersebut dapat didigitalkan bersama dengan sinyal yang diinginkan, tanpa menyebabkan front-end menjadi jenuh.
Tetapi nama permainannya adalah pertama-tama mengenali apakah sinyal telah rusak, yang lebih mudah diucapkan daripada dilakukan, menurut NXP. Teknik untuk melakukannya bergantung pada bentuk gelombang radar spesifik dari radar korban dan interferensi. Karena kerangka peraturan saat ini memungkinkan berbagai cara membangun bentuk gelombang radar, setiap produsen sensor radar memilihnya sendiri, sehingga prosesnya tidak hanya beragam tetapi juga rumit.
Standar de facto dalam radar otomotif adalah radar gelombang kontinu termodulasi frekuensi (FMCW). FMCW menawarkan kinerja yang sangat baik yang relatif sederhana dan elegan. Ini mencakup bandwidth besar dengan ADC bandwidth rendah dan memberikan perkiraan kecepatan target yang kuat, menurut NXP. Tapi itu datang dengan beberapa peringatan.
Pabrikan yang berbeda menggunakan pengaturan parameter yang berbeda dari bentuk gelombang FMCW untuk membedakan proposisi produk mereka dan mencakup persyaratan aplikasi yang berbeda, seperti frekuensi pembawa, bandwidth, durasi kicauan, waktu pengambilan sampel, durasi siklus penginderaan, dan cara yang berbeda untuk mengubah parameter selama periode penginderaan.
Untuk rekap:sensor radar pertama-tama perlu mengenali jika ada pengganggu. Deteksi gangguan bekerja dengan mengenali karakteristik unik dari sinyal alien. Setelah interferensi terdeteksi, algoritme sistem harus menghapusnya dari sinyal yang diterima selengkap mungkin tanpa merusak atau menghilangkan sinyal yang diinginkan.
Semua ini tidak akan mengejutkan siapa pun di komunitas radar. “Ada algoritme pemrosesan sinyal buku teks di pasaran, dan mereka sudah digunakan oleh industri,” kata Gu.
Algoritma buku teks, bagaimanapun, memiliki batas, katanya. “Mereka sering terbatas pada penanganan interferensi berkorelasi rendah. Dan mereka juga hanya mampu menangani gangguan dalam jumlah yang sangat terbatas — satu atau dua sekaligus.”
Tujuan NXP adalah untuk lebih mengembangkan algoritma sinyal digital canggih yang berbeda untuk menghilangkan interferensi.
ST sedang mengerjakan metodologinya sendiri. Duncan berkata, “Jika Anda mengetahui apa yang dimaksud dengan kicauan radar, Anda dapat dengan mudah menyaring/mengabaikan sinyal palsu. Dimungkinkan juga untuk memperkenalkan tanda tangan di antara kicauan.”
Namun, Duncan menambahkan, “Jika ada lebih banyak standarisasi/pembagian tentang apa yang ditransmisikan, itu akan membantu tindakan pencegahan untuk menghilangkan sinyal yang tidak diinginkan.”
Merasa gangguan radar?
NHTSA menyusun beberapa skenario yang mensimulasikan gangguan yang diperkirakan terjadi pada kemacetan radar.
Dalam kasus lalu lintas di jalan raya dua jalur, dengan asumsi bahwa radar menggunakan frekuensi pembawa yang dipilih secara acak, NHTSA memperkirakan bahwa “radar otomotif akan menghadapi daya dari radar lain yang jauh lebih besar daripada gema transmisinya sendiri yang diperlukan untuk melacak kendaraan lain. Interferensi mendekati empat kali lipat, atau hampir 40 dB, lebih besar dari gema tipikal target referensi, seperti yang ditentukan untuk sistem.”
Dalam radar yang menghadap ke belakang (seperti dalam sistem deteksi titik buta), “unit ini rentan terhadap kedatangan langsung radar penghindaran tabrakan ke depan yang memanfaatkan daya dan penguatan antena yang lebih tinggi.” Studi tersebut mengatakan, “Analisis kami menunjukkan unit-unit ini dapat mengalami gangguan daya dari radar penghindaran tabrakan ke depan yang hampir lima kali lipat, atau 50 dB, lebih besar dari pantulan dari target referensi yang ditentukan.”
Namun sejauh ini, dampak radar belum terasa di jalan dunia nyata.
“Interferensi radar-ke-radar masih belum diketahui dan sebagai peneliti terapan yang bekerja dengan radar hampir setiap hari, VSI tidak dapat mengatakan bahwa kami pernah mengalami gangguan radar-ke-radar dari kendaraan lain saat menguji di jalan umum,” kata Magney dari VSI Labs. . “Kami dapat berasumsi bahwa kami terpapar karena begitu banyak kendaraan di jalan saat ini memiliki campuran radar untuk jarak pendek hingga jarak jauh,” tambahnya.
Selama panggilan keuangan Q1 Tesla hari Senin, CEO Elon Musk mengulangi rencana untuk menghilangkan radar dari kendaraan Tesla, membuat masalah gangguan radar diperdebatkan — setidaknya untuk kendaraan Tesla.
Namun, OEM mobil lain, Tier 1, dan pemasok teknologi otomotif tidak akan segera meninggalkan radar.
Radar khususnya sangat penting karena tahan cuaca, tegas Magney dari VSI. “Radar adalah salah satu sensor ADAS yang paling hemat biaya dan penetrasinya akan tumbuh secara dramatis di tahun-tahun mendatang.”
>> Artikel ini awalnya diterbitkan di situs saudara kami, EE Waktu.
Konten Terkait:
Pakar ADAS mempertimbangkan integrasi sensor di kendaraan masa depan
Kendaraan ADAS mendapat skor buruk dalam hal keselamatan pejalan kaki
Masa depan kendaraan otomatis menghadapi pertanyaan sensor yang belum terjawab
Meningkatkan penginderaan jalan di luar visual dengan pemrosesan data cerdas
Radar-on-chip 60-GHz mendukung persyaratan industri otomotif
Sensor mmWave otomotif mengaktifkan radar yang lebih cerdas
Untuk lebih banyak Tertanam, berlangganan buletin email mingguan Tersemat.