Robo-starfish dari MIT CSAIL memungkinkan studi lebih dekat tentang kehidupan akuatik
Para ilmuwan telah menemukan 'robo-starfish' yang memberi kita lebih banyak wawasan tentang kehidupan akuatik, seperti yang dilaporkan Adam Conner-Simons, atau MIT CSAIL. (Lihat video di bawah.)
Para ahli biologi telah lama mengalami tantangan dalam mendokumentasikan kehidupan laut, dengan banyak spesies ikan yang terbukti cukup sensitif terhadap pergerakan manusia di bawah air.
Sebagai solusi yang mungkin, ilmuwan komputer telah mengembangkan robot laut khusus yang dapat bergerak diam-diam di antara rekan-rekan mereka yang berbasis karbon. Pada tahun 2018, misalnya, tim dari MIT Computer Science and Artificial Intelligence Lab (CSAIL) membuat robot ikan lunak yang berenang secara mandiri dengan ikan asli di sepanjang terumbu karang Fiji.
Namun, dinamika kompleks tentang bagaimana air bergerak – dan kemampuannya untuk dengan cepat merusak beberapa sistem elektronik yang sangat baik – telah membuat robot bawah air sangat sulit untuk dikembangkan dibandingkan dengan robot di udara atau darat.
Dengan ikan tersebut, tim CSAIL harus melalui masa percobaan dan kesalahan selama berbulan-bulan untuk mengubah desain secara manual sehingga benar-benar dapat bekerja dengan andal di dalam air.
Sementara robot itu sangat kompleks, kelompok yang dipimpin oleh profesor MIT Wojciech Matusik dan Daniela Rus masih merasa bahwa ada ruang untuk mempercepat proses produksi. Dengan pemikiran tersebut, mereka kini telah menciptakan alat baru untuk mensimulasikan dan membuat robot lunak yang berfungsi dalam hitungan jam.
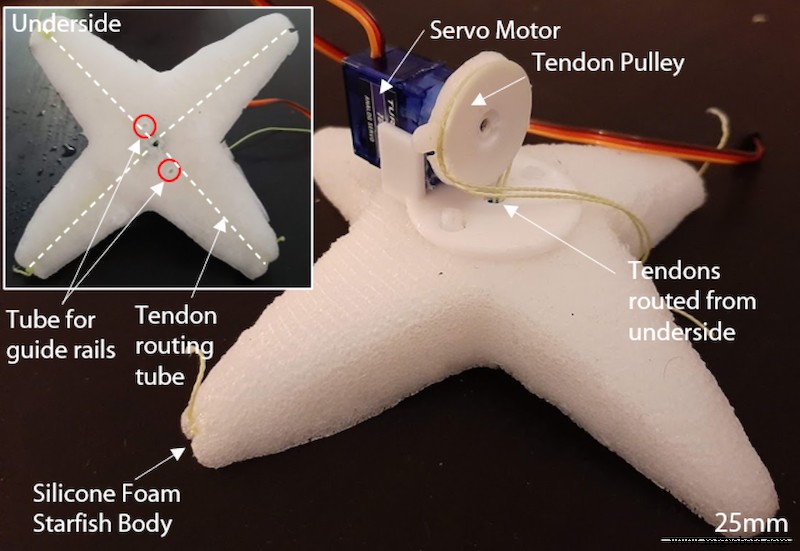
Tim menggunakan sistem mereka untuk membuat bintang laut robotik lunak yang terbuat dari busa silikon dan mampu bergerak dengan satu aktuator bertenaga rendah. Bintang laut bergerak melalui tendon di keempat kakinya, yang terhubung ke motor servo yang digunakan untuk melenturkan dan mengendurkan kaki.
Postdoc CSAIL Josephine Hughes, salah satu penulis utama makalah baru bersama mahasiswa PhD Tao Du tentang bintang laut, mengatakan:“Interaksi pasif antara robot bawah air dan kekuatan fluida di sekitarnya – apakah itu arus yang tenang atau gelombang yang bergelombang – adalah jauh lebih rumit daripada saat robot berjalan di medan yang stabil, yang membuat pembuatan sistem kontrolnya cukup sulit.
“Tetapi dengan menggunakan simulator ini, proses yang biasanya memakan waktu berhari-hari atau berminggu-minggu dapat terjadi hanya dalam beberapa jam.”
Du mengatakan bahwa tim memilih desain bintang laut karena kesederhanaan dan keanggunan gerakannya, dengan meremas dan melepaskan kakinya menciptakan gerakan maju.
Namun, tim menemukan bahwa simulator bekerja untuk berbagai tipe tubuh, sehingga mereka selanjutnya akan mengeksplorasi desain yang terinspirasi oleh penyu, pari manta, dan hiu yang melibatkan struktur yang lebih kompleks seperti sendi, sirip, dan sirip.
Alat kelompok ini melibatkan model pembelajaran mesin yang melakukan simulasi awal dan desain mekanisme kontrol robot, yang kemudian dibuat dengan cepat.
Eksperimen dunia nyata dengan robot kemudian digunakan untuk memperoleh lebih banyak data guna meningkatkan dan mengoptimalkan desainnya berulang kali. Hasilnya adalah robot biasanya hanya perlu difabrikasi ulang sekali lagi. (Makalah terpisah tentang pengembangan alat simulasi saat ini sedang ditinjau.)
“Saat melakukan simulasi robot, kita harus membuat perkiraan yang, menurut definisi, menciptakan kesenjangan antara simulasi dan kenyataan,” kata Cecilia Laschi, profesor kontrol dan mekatronik di National University of Singapore yang tidak terlibat dalam penelitian.
“Pekerjaan ini dimaksudkan untuk mengurangi kesenjangan realitas tersebut, dengan loop campuran antara simulasi dan eksperimen nyata yang cukup efektif.”
Untuk tubuh bintang laut, tim menggunakan busa silikon karena sifatnya yang elastis, daya apung alami, dan kemampuan untuk dibuat dengan cepat dan mudah. Dalam eksperimen, para peneliti menemukan bahwa bintang laut dapat bergerak di air empat kali lebih cepat daripada saat menggunakan pengontrol yang dibuat dengan tangan. oleh seorang ahli manusia.
Memang, Hughes mengatakan bahwa tim menemukan bahwa simulator tampaknya menggunakan strategi kontrol yang tidak pernah terpikirkan oleh manusia.
“Dengan robot bintang laut, kami mempelajari bahwa, selain propulsi kaki yang cukup terlihat yang mereka lakukan, ada beberapa gerakan frekuensi tinggi yang lebih halus yang dapat memberi mereka momentum penting,” kata Hughes.
Proyek ini dibangun dari serangkaian proyek CSAIL yang berfokus pada robot lunak, yang menurut Rus berpotensi lebih aman, lebih kokoh, dan lebih gesit daripada rekan-rekan mereka yang bertubuh kaku.
Para peneliti semakin beralih ke robot lunak untuk lingkungan yang membutuhkan pergerakan melalui ruang sempit, karena robot semacam itu lebih tangguh untuk dapat pulih dari tabrakan.
Laschi mengatakan bahwa alat tim dapat digunakan untuk mengembangkan robot untuk mengukur data di berbagai lokasi di laut dalam, dan untuk membayangkan robot yang dapat bergerak dengan cara baru yang belum terpikirkan oleh para peneliti.
“Robot yang terinspirasi dari bio seperti robot bintang laut dan SoFi dapat lebih dekat dengan kehidupan laut tanpa mengganggunya,” kata Rus. “Di masa depan, dengan merancang dan membangun instrumen robotik yang terinspirasi dari bio dengan cepat, akan memungkinkan untuk membuat observatorium khusus yang dapat digunakan di hutan belantara untuk mengamati kehidupan.”
Du dan Hughes ikut menulis makalah dengan Matusik, Rus, dan mahasiswa MIT Sebastien Wah. Makalah ini diterbitkan minggu ini di Journal of Robotics Automation Letters, dan juga akan dipresentasikan secara virtual bulan depan di Konferensi Internasional IEEE tentang Soft Robotics (RoboSoft).


