Loop Kontrol:Terbuka vs. Tertutup
 Loop kontrol umpan balik kemungkinan merupakan alat yang paling inovatif dan andal di bidang teknik kontrol. Loop kontrol secara keseluruhan efisien alat untuk menentukan masalah dan masalah dalam suatu sistem, mencapai nilai setpoint dalam proses, dan menjaga stabilitas sistem. Ada tiga jenis utama sistem loop kontrol:loop tertutup, loop terbuka, dan kombinasi loop terbuka dan tertutup. Loop tertutup lebih bergantung pada umpan balik, sedangkan loop terbuka tidak. Gabungan menggunakan umpan balik dan umpan maju untuk menstabilkan proses.
Loop kontrol umpan balik kemungkinan merupakan alat yang paling inovatif dan andal di bidang teknik kontrol. Loop kontrol secara keseluruhan efisien alat untuk menentukan masalah dan masalah dalam suatu sistem, mencapai nilai setpoint dalam proses, dan menjaga stabilitas sistem. Ada tiga jenis utama sistem loop kontrol:loop tertutup, loop terbuka, dan kombinasi loop terbuka dan tertutup. Loop tertutup lebih bergantung pada umpan balik, sedangkan loop terbuka tidak. Gabungan menggunakan umpan balik dan umpan maju untuk menstabilkan proses.
Diagram berikut mengilustrasikan seluruh loop kontrol umpan balik:
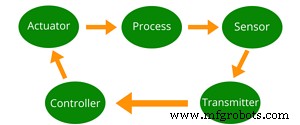
Memisahkan ini, kita mendapatkan:
- Proses yang harus dikendalikan
- Sensor yang mengukur parameter fisik proses
- Pemancar yang mengubah informasi sensorik melalui sinyal elektronik
- Pengontrol yang membandingkan sinyal dan setpoint
- Aktuator yang melakukan upaya korektif dalam menanggapi sinyal yang dikirim oleh pengontrol
Dalam sistem kontrol loop tertutup, urutan diulang sampai setpoint tercapai. Beberapa contoh umum adalah termostat untuk suhu tungku atau cruise control di dalam mobil. Tetapi ini tidak berarti bahwa semua operasi otomatis memerlukan umpan balik agar berfungsi dengan baik. Konfigurasi loop terbuka, yang mengasumsikan urutan hanya diperlukan sekali, dapat melayani beberapa operasi tanpa perlu konfirmasi terus-menerus melalui umpan balik.
Jenis Kontrol Loop Tertutup
Kontrol Loop Tertutup Berkelanjutan
Tidak semua proses loop tertutup sama. Untuk proses kontrol berkelanjutan, loop umpan balik mempertahankan nilai variabel kontrol yang ditetapkan oleh pengguna, juga disebut setpoint. Pengontrol melakukan pengurangan sederhana dari pengukuran sensorik terbaru dari setpoint. Besarnya hasil menentukan upaya korektif yang akan diterapkan oleh pengontrol, melalui aktuator.
Misalnya, mobil yang cruise controlnya diaktifkan akan menggunakan speedometer sebagai sensor untuk mengukur kecepatannya. Jika kecepatan lebih rendah dari nilai yang ditetapkan maka pengontrol mempercepat mobil dengan memberi lebih banyak bahan bakar. Jika mobil melaju terlalu cepat, input bahan bakar berkurang secara proporsional. Proses measure-decide-actuate ini berlanjut hingga kecepatan mobil mencapai setpoint.
Kontrol Loop Tertutup Diskrit
Dengan kontrol loop tertutup kontinu, variabel yang diinginkan diukur setiap saat, tetapi dengan sistem kontrol diskrit, peristiwa pemicu akan menghasilkan urutan pengukuran-putuskan-aktuasi. Misalnya, manusia menggunakan mata mereka untuk menentukan status cahaya sekitar di luar sebelum mengemudi dan apakah akan menyalakan lampu depan atau tidak. Tidak ada penyesuaian lebih lanjut yang diperlukan hingga peristiwa pemicu seperti kejadian awan tebal atau inisiasi perjalanan berikutnya.
Loop umpan balik diskrit jauh lebih sederhana daripada loop kontinu karena tidak melibatkan pemantauan berkelanjutan atau masalah seperti overshoot yang tajam. Hasil instan diperoleh saat lampu depan dinyalakan dibandingkan dengan hasil bertahap dengan cruise control.
Kontrol Loop Terbuka
Seperti disebutkan sebelumnya, pengontrol loop terbuka mengasumsikan bahwa setpoint akan dicapai dalam sekali jalan dan menerapkan upaya kontrol tunggal ketika pemicu terjadi. Kontroler ini juga dapat diberikan pilihan untuk mengukur hasil. Misalnya, apakah motor mulai atau berhenti? Pengukuran ini terutama untuk pertimbangan keamanan dan bukan bagian dari urutan.
Kadang-kadang, pengontrol loop tertutup dapat beroperasi seperti loop terbuka karena kegagalan sensor atau pengambilalihan manual oleh operator. Operator harus melakukan intervensi ketika pengontrol umpan balik tidak dapat mempertahankan stabilitasnya. Misalnya, pengontrol tekanan yang kuat mungkin tidak dapat mengkompensasi penurunan tekanan saluran dengan benar, sehingga sering terjadi overshoot dan osilasi. Dalam kasus ini, operator harus mengambil kendali secara manual untuk menstabilkan sistem.
Ada juga beberapa proses yang kontrol stabilnya terlalu sulit untuk dikonfigurasi, sehingga membutuhkan operator yang berpengalaman untuk mengambil alih dengan sangat sering. Operator dapat menggunakan pengalaman mereka untuk memanipulasi input proses dan mempertahankan setpoint yang diinginkan lebih cepat daripada pengontrol. Tapi ini bukan situasi yang ideal dengan menggunakan loop kontrol. Jadi apa yang akan terjadi jika kontrol loop terbuka dan tertutup digabungkan?
Menggabungkan Kontrol Loop Terbuka dan Tertutup
Kontrol loop terbuka disertai dengan kelemahan ketidakakuratan, karena menghapus bagian umpan balik juga menghilangkan jaminan upaya kontrol yang membuat upaya kontrol yang diperlukan. Kontrol loop terbuka dan tertutup dapat digabungkan untuk membentuk strategi umpan maju jika kecepatan dan akurasi diperlukan secara paralel.
Pengontrol feedforward dibangun di atas model matematis dari proses sehingga semua upaya kontrol akan serupa dengan insinyur berpengalaman yang beroperasi dalam mode manual. Ini mengukur hasil upaya loop terbuka awal dan menerapkan koreksi lebih lanjut untuk menghilangkan kesalahan dan mencapai setpoint. Jenis pengontrol ini berguna ketika sensor yang tepat tersedia untuk mengukur banyak kriteria. Jika efeknya di masa depan dapat diprediksi, maka pengontrol dapat mengambil langkah-langkah pencegahan untuk memastikan kesalahan dihilangkan dalam waktu yang minimal.
Misalnya, jika sebuah mobil dilengkapi dengan radar serta cruise control, ia dapat melihat sebuah bukit muncul dan berakselerasi untuk mengimbangi kekuatan tambahan yang diperlukan untuk naik ke atas bukit. Tanpa pemberitahuan sebelumnya, cruise control tidak akan pernah tahu bahwa ia perlu berakselerasi, yang mengarah ke loop tertutup yang menerapkan upaya korektif hingga setpoint tercapai lagi.
Setiap jenis loop kontrol memiliki aplikasinya sendiri. Kontrol loop terbuka paling cocok untuk situasi di mana setpoint dapat dicapai dalam satu bidikan. Kontrol loop tertutup adalah yang terbaik untuk situasi yang memerlukan trial and error untuk mencapai setpoint. Dan kombinasi kontrol loop terbuka dan tertutup membutuhkan model matematika dan terkadang sensor berfungsi dengan baik. Rentang opsi memungkinkan operator untuk memilih loop kontrol yang benar sesuai kebutuhan mereka.