

Teknologi Industri

Manufaktur industri
Motor keengganan variabel didasarkan pada prinsip bahwa sepotong besi yang tidak dibatasi akan bergerak untuk menyelesaikan jalur fluks magnet dengan keengganan minimum , analog magnet dari hambatan listrik.
Jika medan putar motor sinkron besar dengan kutub yang menonjol dihilangkan energinya, maka torsi sinkron masih akan berkembang 10 atau 15%. Hal ini disebabkan oleh keengganan variabel sepanjang putaran rotor. Tidak ada aplikasi praktis untuk motor reluktansi sinkron besar. Namun, praktis dalam ukuran kecil.
Jika slot dipotong menjadi rotor tanpa konduktor dari motor induksi, sesuai dengan slot stator, motor reluktansi sinkron hasil.
Ini dimulai sebagai motor induksi tetapi berjalan dengan sejumlah kecil torsi sinkron. Torsi sinkron disebabkan oleh perubahan keengganan jalur magnet dari stator melalui rotor saat slot sejajar.
Motor ini merupakan cara yang murah untuk mengembangkan torsi sinkron sedang. Faktor daya rendah, torsi tarik-keluar rendah, dan efisiensi rendah adalah karakteristik motor reluktansi variabel yang digerakkan saluran listrik langsung. Begitulah status motor reluktansi variabel selama satu abad sebelum pengembangan kontrol daya semikonduktor.
Jika rotor besi dengan kutub, tetapi tanpa konduktor apa pun, dipasang ke stator multi-fase, motor reluktansi sakelar , mampu menyinkronkan dengan medan stator, hasilnya. Ketika pasangan kutub kumparan stator diberi energi, rotor akan bergerak ke jalur reluktansi magnetik terendah (gambar di bawah).
Motor keengganan yang diaktifkan juga dikenal sebagai motor keengganan variabel. Keengganan rotor ke jalur fluks stator bervariasi dengan posisi rotor.
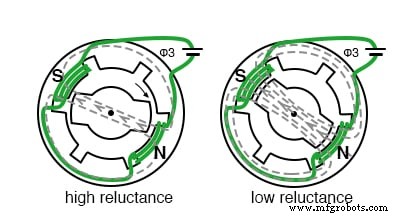
Reluktansi adalah fungsi dari posisi rotor dalam motor reluktansi variabel
Peralihan berurutan (Gambar di bawah) dari fase stator menggerakkan rotor dari satu posisi ke posisi berikutnya. Fluks magnet mencari jalur dengan keengganan paling kecil. Di bawah ini adalah rotor dan bentuk gelombang yang terlalu disederhanakan yang menggambarkan operasi.
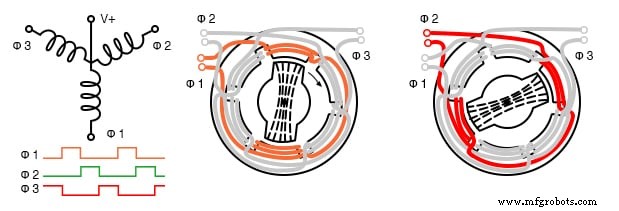
Motor reluktansi variabel, operasi yang terlalu disederhanakan
Jika salah satu ujung dari masing-masing belitan 3-fase dari motor reluktansi sakelar dibawa keluar melalui kabel timbal yang sama, kami dapat menjelaskan operasi seolah-olah itu adalah motor stepper (gambar di atas). Sambungan kumparan lainnya secara berurutan ditarik ke tanah, satu per satu, dalam penggerak gelombang pola. Ini menarik rotor ke medan magnet yang berputar searah jarum jam dalam 60° peningkatan.
Berbagai bentuk gelombang dapat menggerakkan motor reluktansi variabel (gambar di bawah). Penggerak gelombang (a) sederhana, hanya membutuhkan sakelar unipolar ujung tunggal. Itu adalah salah satu yang hanya beralih ke satu arah. Lebih banyak torsi disediakan oleh penggerak bipolar (b) tetapi membutuhkan sakelar bipolar.
Power driver harus menarik secara bergantian tinggi dan rendah. Bentuk gelombang (a &b) berlaku untuk versi motor stepper dari motor reluktansi variabel. Untuk pengoperasian bebas getaran yang mulus, pendekatan 6 langkah dari gelombang sinus (c) diinginkan dan mudah dibuat.
Penggerak gelombang sinus (d) dapat dihasilkan oleh modulator lebar pulsa (PWM) atau ditarik dari saluran listrik.
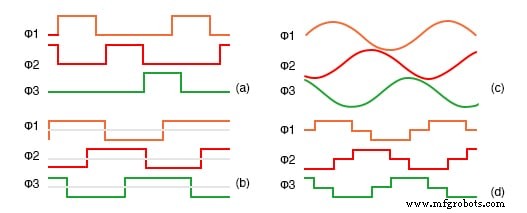
Variable reluctance motor drive waveforms:(a) unipolar wave drive, (b) bipolar full step (c) sinewave (d) bipolar 6-step
Menggandakan jumlah kutub stator mengurangi kecepatan putar dan meningkatkan torsi. Ini mungkin menghilangkan penggerak reduksi gigi. Motor keengganan variabel yang dimaksudkan untuk bergerak dalam langkah-langkah diskrit, berhenti, dan start adalah motor langkah keengganan variabel.
Jika rotasi halus adalah tujuannya, ada versi motor reluktansi yang digerakkan secara elektronik. Motor atau stepper reluktansi variabel sebenarnya menggunakan rotor seperti pada Gambar di bawah.
Motor keengganan variabel berkinerja buruk ketika saluran listrik langsung digerakkan. Namun, mikroprosesor dan solid-state power drive menjadikan motor ini solusi performa tinggi yang ekonomis dalam beberapa aplikasi volume tinggi.
Meski sulit dikendalikan, motor ini mudah berputar. Pergantian kumparan medan secara berurutan menciptakan medan magnet berputar yang menyeret rotor berbentuk tidak beraturan ke sekelilingnya saat mencari jalur reluktansi magnetik terendah.
Hubungan antara torsi dan arus stator sangat nonlinier—sulit dikendalikan.
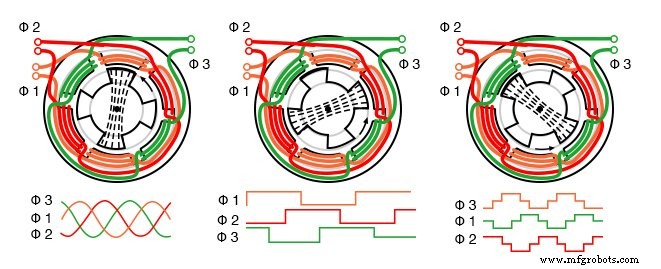
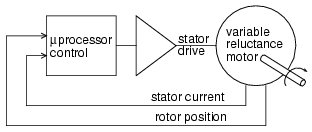
Motor reluktansi variabel yang digerakkan secara elektronik
Motor reluktansi variabel yang digerakkan secara elektronik (Gambar di bawah) menyerupai motor DC tanpa sikat tanpa rotor magnet permanen. Hal ini membuat motor sederhana dan murah. Namun, ini diimbangi dengan biaya kontrol elektronik, yang hampir tidak sesederhana untuk motor DC brushless.
Sementara motor reluktansi variabel sederhana, bahkan lebih dari motor induksi, sulit untuk dikendalikan. Kontrol elektronik memecahkan masalah ini dan membuatnya praktis untuk menggerakkan motor jauh di atas dan di bawah frekuensi saluran listrik. Motor reluktansi variabel yang digerakkan oleh servo , sistem umpan balik elektronik, mengontrol torsi dan kecepatan, meminimalkan torsi riak.
Motor reluktansi variabel yang digerakkan secara elektronik
Ini adalah kebalikan dari torsi riak tinggi yang diinginkan pada motor stepper. Alih-alih stepper, motor reluktansi variabel dioptimalkan untuk rotasi kecepatan tinggi terus menerus dengan torsi riak minimum.
Hal ini diperlukan untuk mengukur posisi rotor dengan sensor posisi putar seperti encoder optik atau magnetik, atau memperoleh ini dari pemantauan EMF kembali stator. Sebuah mikroprosesor melakukan perhitungan kompleks untuk mengalihkan belitan pada waktu yang tepat dengan perangkat solid-state.
Ini harus dilakukan dengan tepat untuk meminimalkan kebisingan yang dapat didengar dan torsi riak. Untuk torsi riak terendah, arus belitan harus dipantau dan dikontrol.
Persyaratan drive yang ketat membuat motor ini hanya praktis untuk aplikasi volume tinggi seperti motor penyedot debu hemat energi, motor kipas, atau motor pompa. Salah satu penyedot debu tersebut menggunakan motor kipas 100.000 rpm yang digerakkan oleh elektronik dengan efisiensi tinggi yang kompak.
Kesederhanaan motor mengkompensasi biaya elektronik penggerak. Tanpa sikat, tanpa komutator, tanpa belitan rotor, tanpa magnet permanen, menyederhanakan pembuatan motor.
Efisiensi motor yang digerakkan secara elektronik ini bisa tinggi. Namun, ini membutuhkan pengoptimalan yang cukup besar, menggunakan teknik desain khusus, yang hanya dapat dibenarkan untuk volume produksi yang besar.
Keuntungan
Kekurangan
Teknologi Industri
Komponen dan persediaan Kabel jumper (generik) Secara keseluruhan × 1 NPN Transistor Serbaguna Untuk rangkaian sel motor getar × 1 Kapasitor Keramik 0.1µF Untuk rangkaian sel motor getar × 1 Resistor 1k ohm Untuk rangkaian sel motor getar × 1 Resistor 221 oh
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Kontroler motor DC hampir ada di mana-mana, dan kami melihatnya di hampir semua aplikasi. Pengendali motor DC banyak digunakan dalam kehidupan sehari-hari, mulai dari lokomotif hingga bor, dari mesin bubut hingga mobil RC. Ada ratusan perusahaan manufaktur di luar sana yang terlibat dalam pembuatan
Motor listrik merupakan komponen penting dalam mengubah energi listrik menjadi energi mekanik. Namun, meskipun semua motor menjalankan fungsi yang sama, memilih yang tepat akan berguna dalam menghasilkan torsi maksimum. Nah, pada artikel kali ini kita akan membedakan antara motor stepper vs motor dc