Proyek Lengan Robot:Panduan Langkah demi Langkah
Apakah Anda berjuang dengan tugas-tugas yang membutuhkan tingkat akurasi yang tinggi? Atau apakah Anda berurusan dengan operasi yang konsisten dan berulang yang membutuhkan presisi dan kinerja tinggi? Kemudian, Anda memerlukan proyek lengan robot.
Selain itu, ini adalah perangkat PCB elektronik andal yang dapat melakukan berbagai operasi. Jadi, Anda akan menemukan lengan robot di berbagai industri seperti:
- Akses Mesin
- Laboratorium
- Otomasi industri
- Manufaktur
Oleh karena itu, akan menjadi ide cemerlang untuk mengambil proyek lengan robot. Tidak diragukan lagi, ini terlihat rumit pada awalnya tetapi, dengan semua bahan yang ada, tugas akan lebih mudah. Dalam artikel ini, kami akan memberikan detail tentang cara membuat lengan robot.
Ayo mulai bekerja!
Apa Itu Lengan Robot?

Lengan Robot Industri
Lengan robot mengacu pada alat mekanis yang dapat Anda otomatisasi melalui perangkat lunak khusus. Dan Anda dapat menginstal perangkat lunak khusus pada mikrokontroler tertentu. Sering kali, perangkat ini dapat menjadi bagian dari robot mirip manusia atau perangkat independen.
Plus, jenis tugas yang dilakukan tergantung pada gerakan sendi lengan. Misalnya, Anda dapat melihat lengan robot dan lengan pegangan robot dengan sambungan terpisah yang dapat bergerak dalam arah lurus.
Bagaimana Cara Membuat Lengan Robot Sederhana?
Kami akan menunjukkan cara membuat lengan robot sederhana yang akan mengingat urutan gerakan dan permainan. Karena itu, mari kita lihat komponen yang Anda butuhkan untuk proyek:
- Papan tempat memotong roti
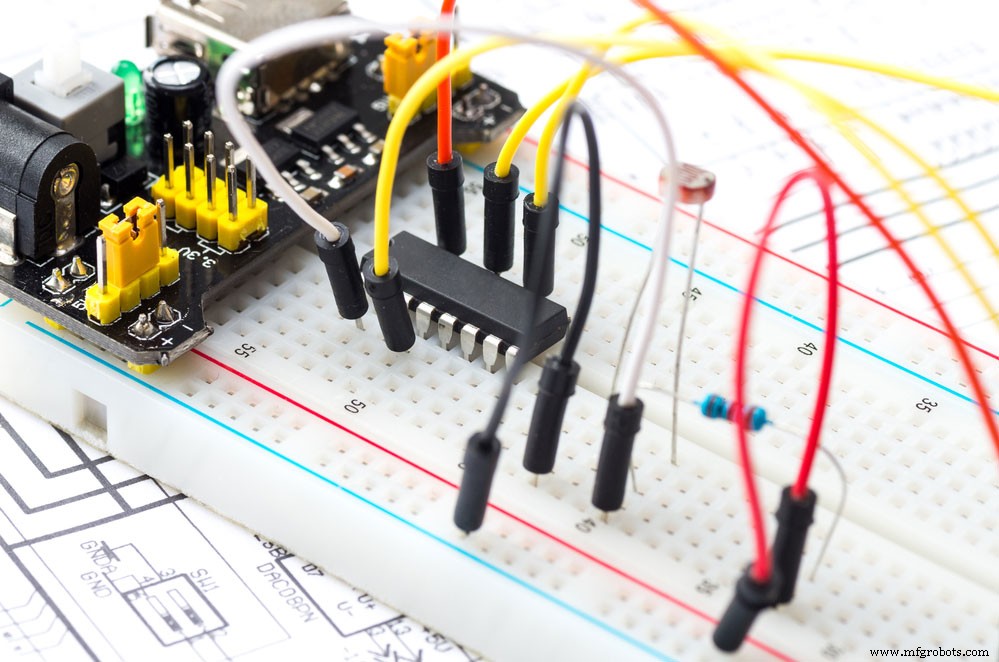
Papan tempat memotong roti
- Potongan Kayu
- Arduino IDE terpasang
- Motor servo (5)
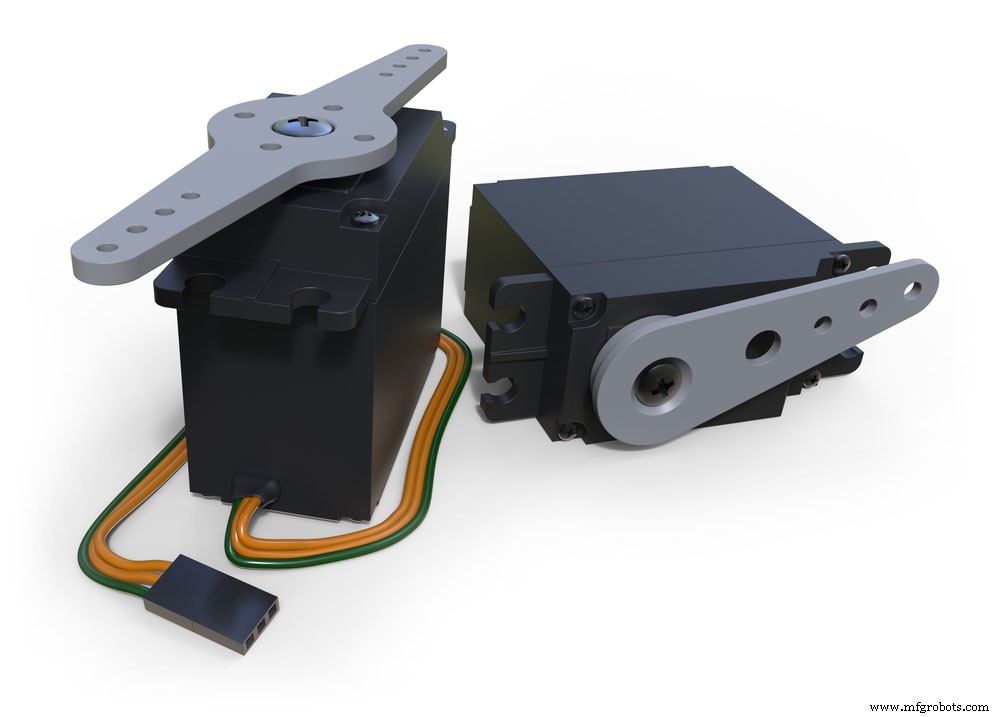
Set motor Servo
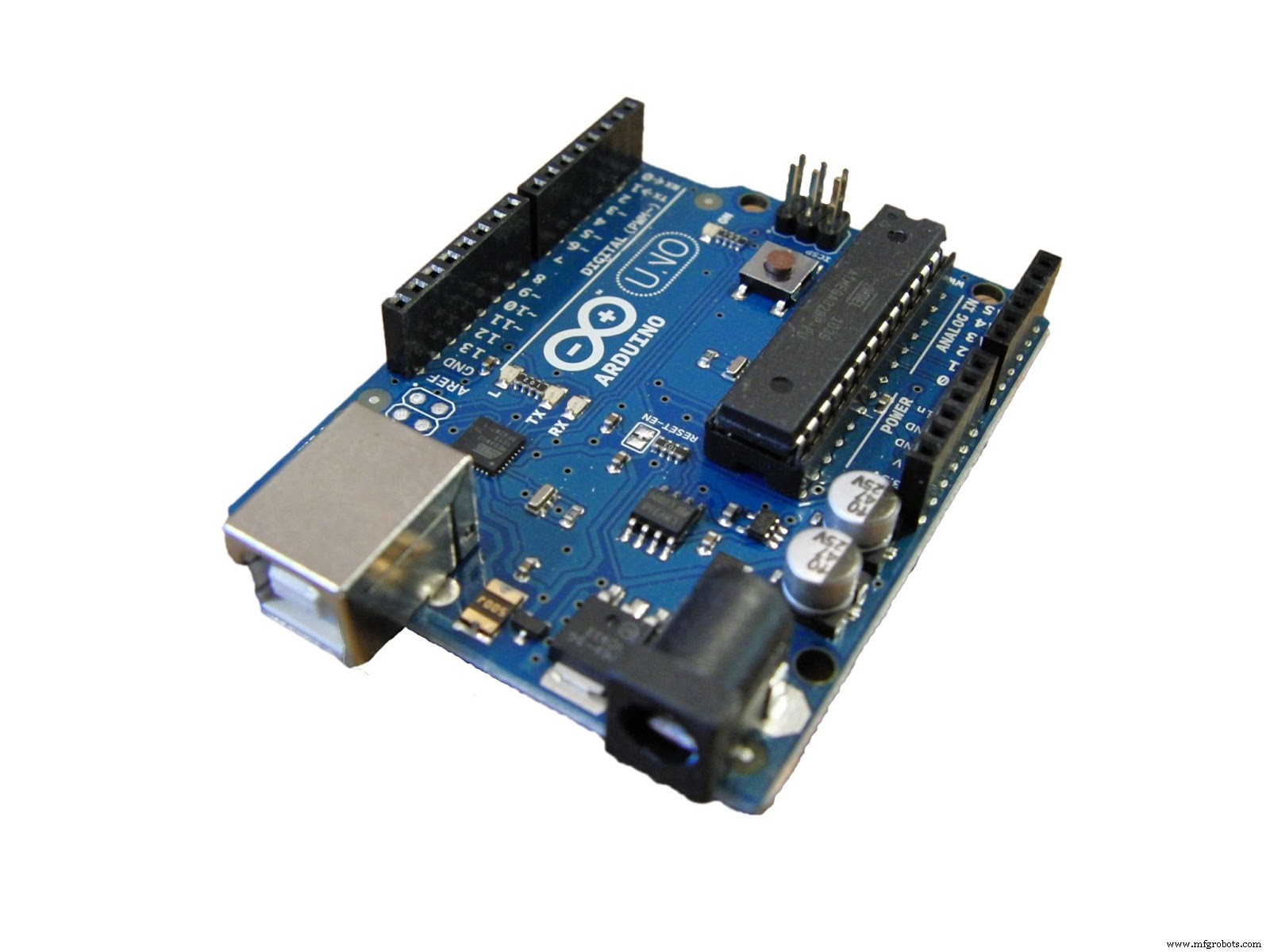
Arduino UNO
Sumber:Wikimedia Commons
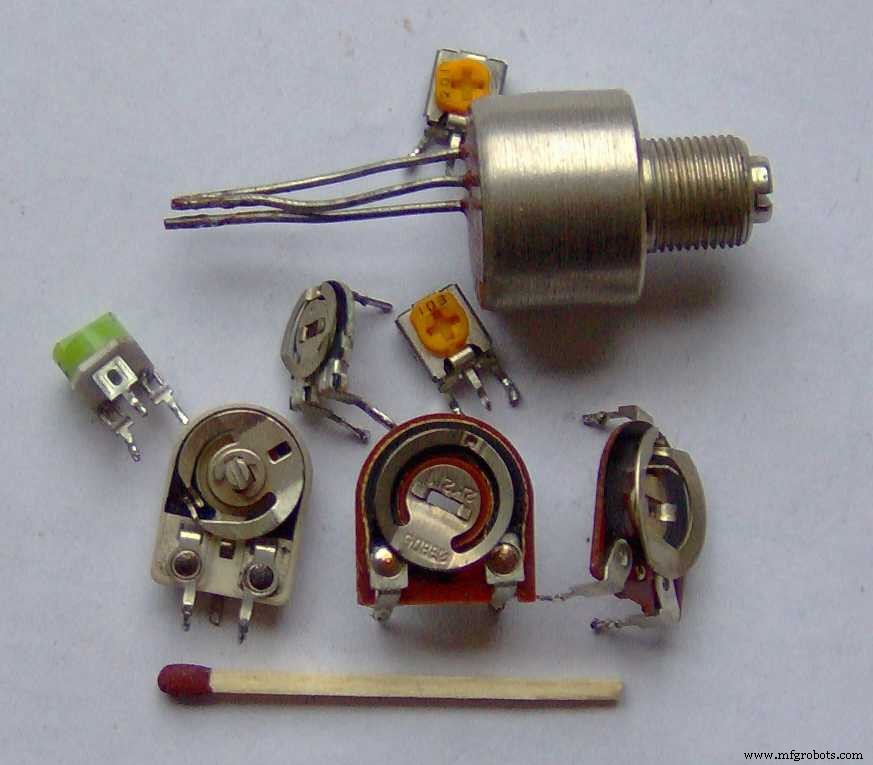
Set Potensiometer
Sumber:Wikimedia Commons
- Adaptor (5V 2A)
- Papan kanvas (ukuran A4)
- Kabel sinyal

Kabel Sinyal
Dengan mengingat hal ini, Anda dapat melanjutkan untuk membangun proyek lengan robot sederhana dengan langkah-langkah berikut:
Lengan Robot Bekerja
Langkah 1- Mulai Menyatukan Potongan-potongannya
Potongan kayu es loli terhubung ke potensiometer
Sumber:Dapat Diinstruksikan
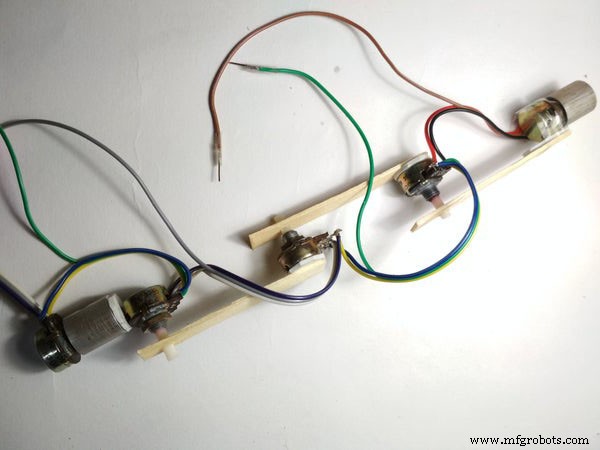
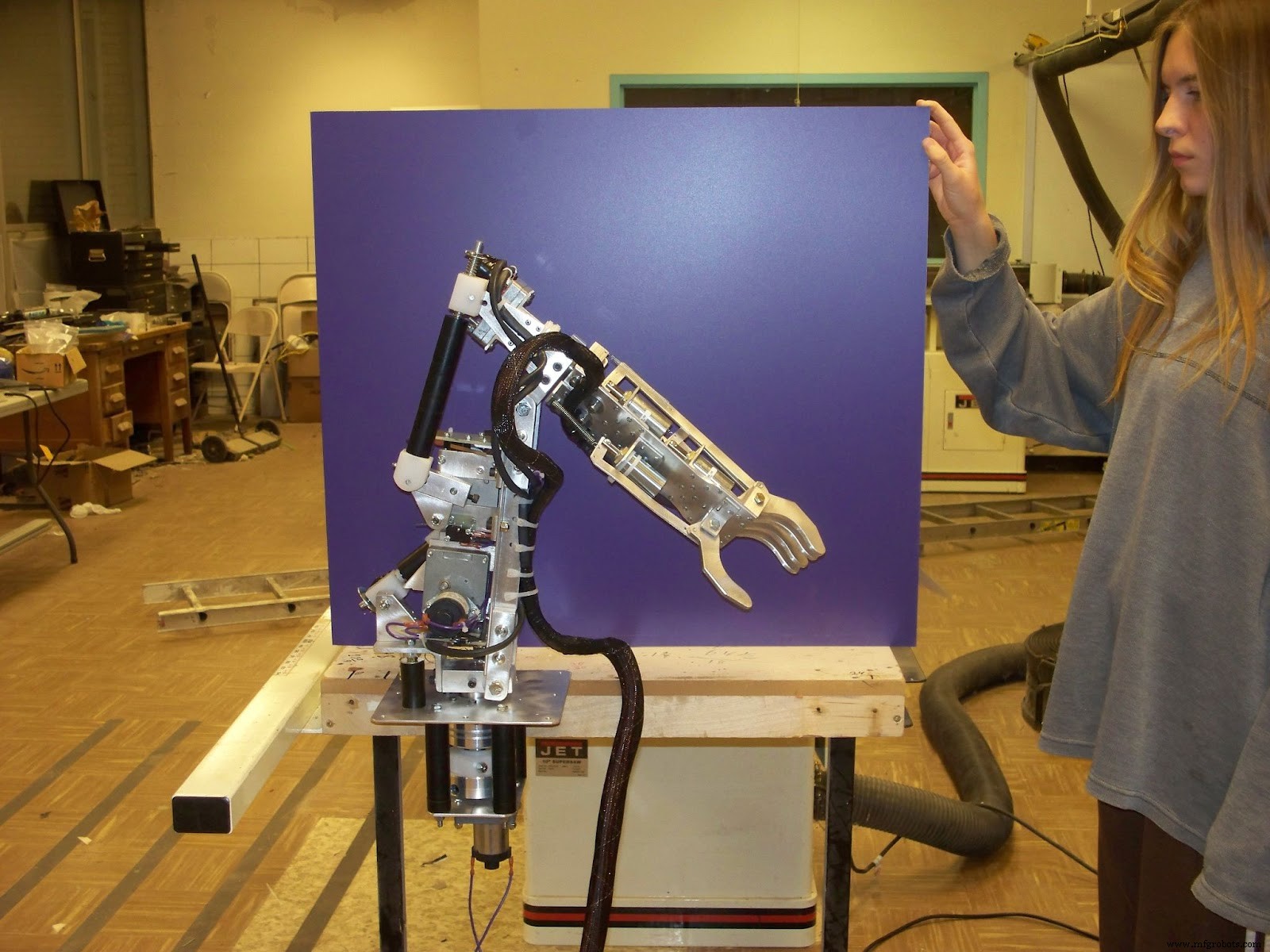
Langkah pertama adalah mendapatkan sepotong kayu kecil dan stabil untuk membuat lengan. Saat Anda berada di sana, pilihlah desain mekanis apa pun yang Anda inginkan. Kemudian, rekatkan servo ke kayu Anda dengan selotip (dua sisi). Setelah itu, jepit servo ke kayu dengan sekrup.
Sedangkan untuk lengan utama, Anda bisa membuatnya dengan menempelkan potensiometer pada potongan kayu kecil. Anda dapat menggunakan papan kanvas sebagai dasar untuk memasang penyiapan.
Langkah 2 – Hubungkan Kabel Anda
Menghubungkan Kabel dan potongan kayu pada papan tempat memotong roti
Sumber:Dapat Diinstruksikan
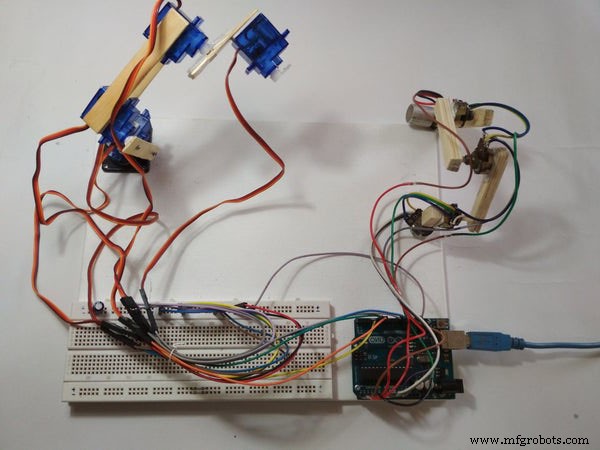
Tujuannya di sini adalah untuk memastikan bahwa Anda menghubungkan semua kabel Anda dengan benar. Dan langkah pertama adalah mendapatkan semua servos Anda. Kemudian, lakukan koneksi paralel servos ke sumber listrik. Artinya, kabel hitam Anda harus menuju ke Gnd sedangkan kabel merah terhubung ke positif.
Setelah Anda memilikinya, dapatkan kabel sinyal Anda (oranye atau kuning) dan pasang ke pin PWM Arduino. Dengan ini, Anda dapat melanjutkan untuk menghubungkan Gnd Arduino secara paralel. Selain itu, Anda perlu memasang potensiometer ke +5V.
Setelah itu, pasang terminal tengah Anda ke pin Analog Arduino. Dengan demikian, Anda dapat mengatur servos dengan pin digital seperti 10, 9, 6, 5, dan 3. Selain itu, Anda dapat menggunakan A0 hingga A4 (pin analog) untuk input dari potensiometer.
Selanjutnya, potensiometer yang terhubung ke A0 membantu mengatur servo yang menempel pada pin 3. Selain itu, pot pada A1 mengontrol servo yang menempel pada pin 5.
Tidak diragukan lagi, Arduino tidak memberi daya pada servos. Namun, penting untuk memastikan bahwa Anda menghubungkan Arduino dan GND dengan benar—agar lengan berfungsi.
Langkah 3 – Saatnya Membuat Kode
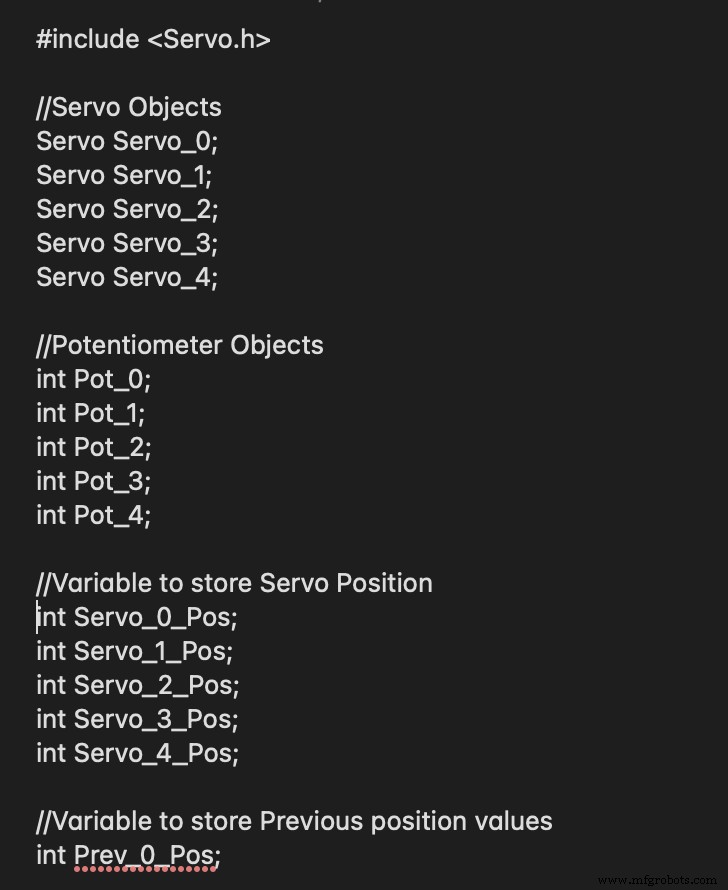
Proses pengkodean untuk proyek ini cukup mudah. Jadi, Anda bisa mulai dengan menyimpan potensiometer dalam array. Ketika Anda mendapatkan catatan, lanjutkan untuk transversal dengan loop for. Dengan begitu, servos akan menangani langkah-langkahnya.
Dengan kata lain, Anda dapat memulai proses dengan menyatakan semua variabel penting secara global. Dengan ini, lebih mudah untuk memahami dan menggunakan variabel di seluruh program.
Setelah itu, lanjutkan ke fungsi utama yang memulai eksekusi pertama. Jadi, Anda akan menemukan fungsi penyiapan yang akan menyoroti pin yang disetel dan fungsinya.
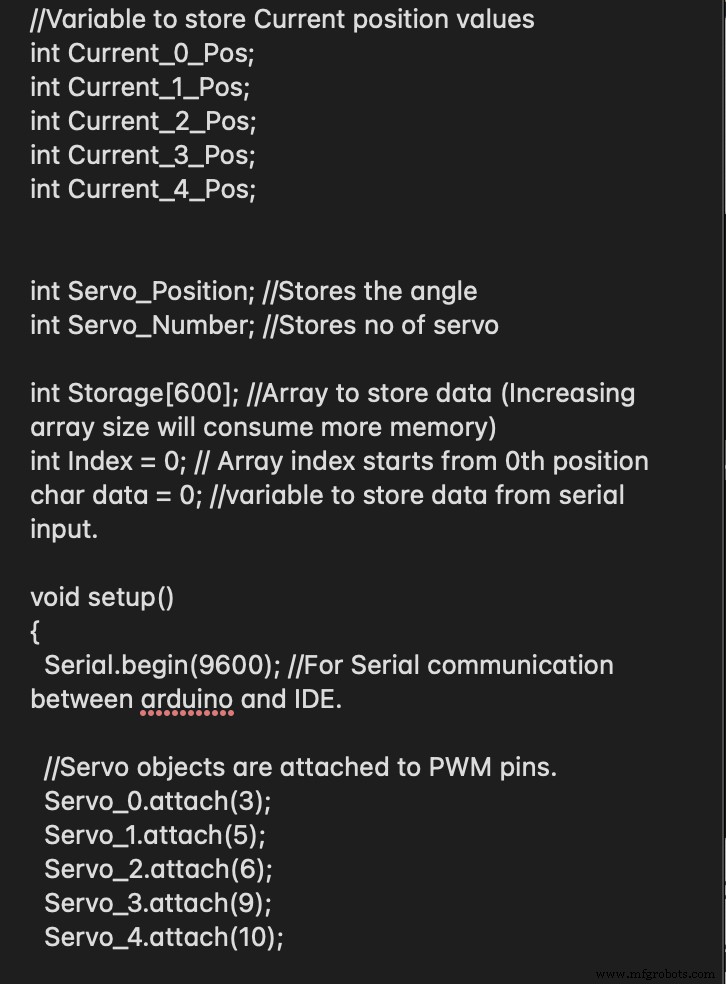
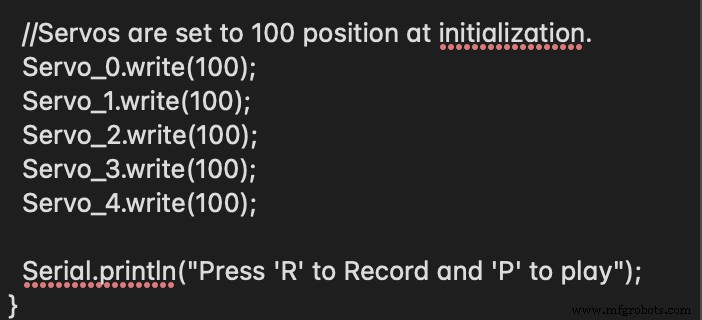
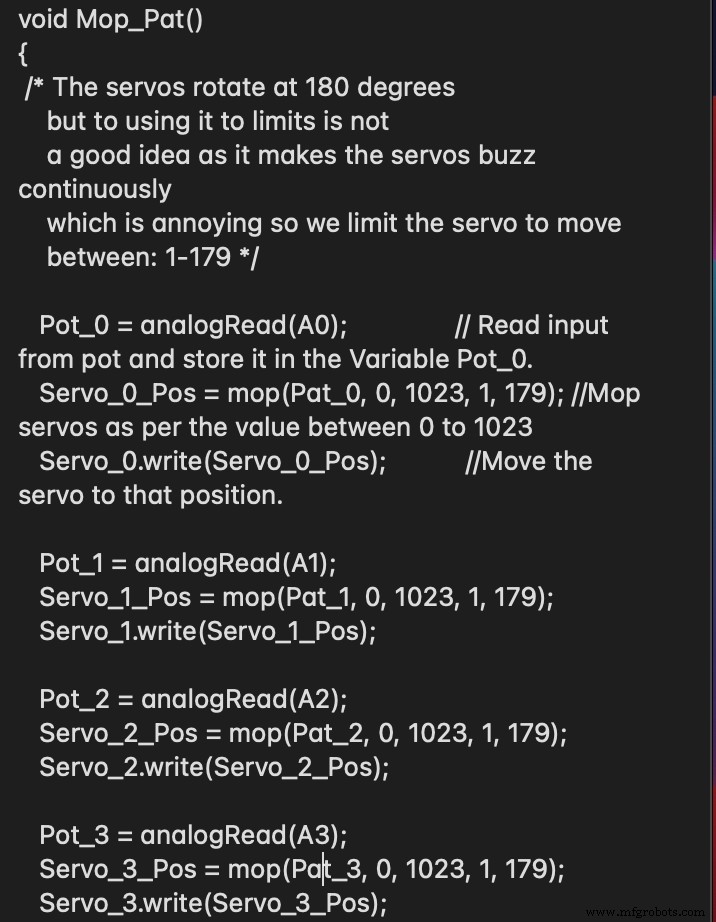
Jika sudah, tugas selanjutnya adalah menggunakan pin Analog Input untuk mendapatkan nilai potensiometer. Selain itu, pin Input Analog membantu memetakan nilai—yang membantu mengatur servo.
Sekarang, saatnya memberi nama fungsi yang ditentukan pengguna. Pada kode di bawah ini, kami memilih Mop_Pat;.
Dengan ini, Anda dapat meletakkan fungsi loop. Setelah Anda selesai dengan kode, Anda dapat mentransfernya ke papan Arduino.
Dengan ini di tempat, lengan robot Anda akan bekerja. Selain itu, Anda dapat melakukan beberapa penyesuaian dengan kode jika diperlukan untuk pengoperasian yang lebih lancar.
Langkah 4 – Uji Coba
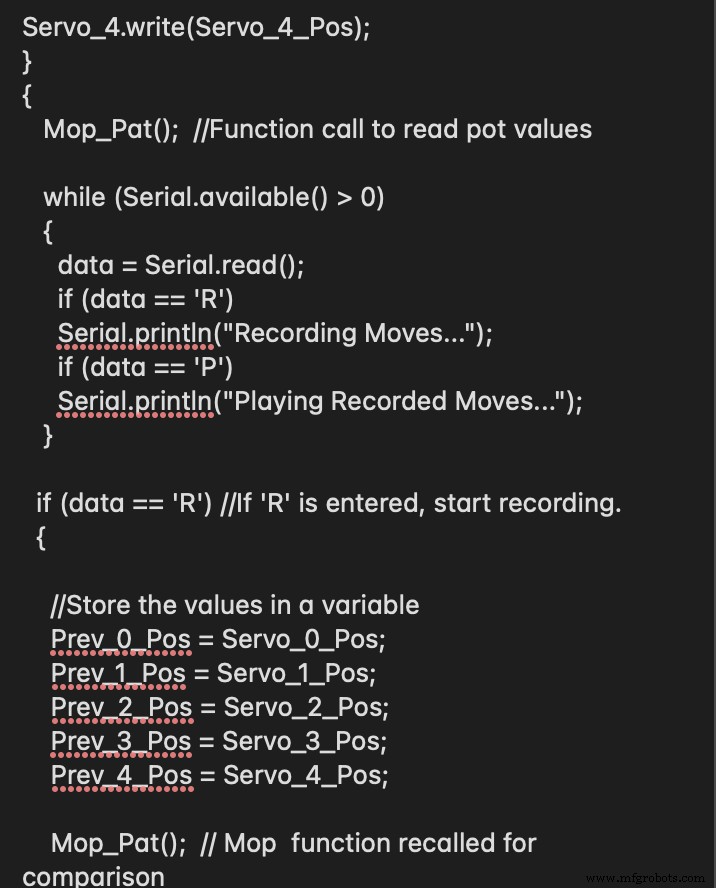
Saat Anda selesai mentransfer kode ke papan, buka opsi Alat. Dalam opsi ini, buka "Serial Monitor." Ketika Anda mengklik fungsi ini, itu akan membantu Anda mengatur ulang Arduino. Dan itu memungkinkan Anda untuk menggunakan lengan master untuk mengontrol lengan robot dengan mudah. Namun, pada titik ini Anda tidak dapat merekam gerakan apa pun.
Jadi, Anda harus mengetikkan “R” di monitor—untuk merekam semua gerakan. Ketika Anda telah merekam semua gerakan Anda, ketik "P." Fungsi ini membantu untuk memutar ulang semua gerakan. Dan bagian terbaiknya adalah servos akan terus melakukan gerakan—selama Anda tidak menyetel ulang papan.
Ide Proyek Lengan Robot Arduino Lainnya
Jika Anda merasa proyek di atas terlalu mendasar, jangan ragu untuk mencoba ide proyek robotik lengan Arduino lainnya seperti:
Lengan Robot dengan Kontrol Gerakan (Arduino + Kinect)
Lengan Robot Terkendali Gerakan Tangan
Sumber:Wikimedia Commons
Proyek ini melibatkan mengarahkan lengan robot dengan gerakan. Dan Anda dapat menangkap gerakan dengan sensor Kinect. Jadi, para insinyur mengembangkan lengan robot untuk meniru gerakan siku, lengan kanan, tangan, dan siku. Selain itu, mereka juga membuat alat ini dengan motor servo.
Lengan Robot yang Dikendalikan Web

Lengan Robot yang dikendalikan web
Lengan robot yang dikendalikan web adalah penemuan luar biasa lainnya. Alat ini menunjukkan kepada Anda kemungkinan mengoordinasikan robot lengan dengan server web. Menariknya, sumber eksternal memberi daya pada perangkat ini, dan menggunakan sekitar enam motor servo.
Jadi, untuk melakukannya, Anda harus mempelajari alur kerjanya, mencatat kode sumber, dan memahami arsitektur sistem.
Lengan Robot Arduino Terkendali Nunchuck
Ide proyek ini menonjol karena keunikannya. Dengan proyek ini, Anda akan belajar cara menggunakan Arduino Mega untuk memprogram perangkat dan memasang robot lengan secara efektif. Anda juga dapat menggunakan Nintendo Nunchuk untuk mengontrol alat ini.
Dan bagian terbaiknya adalah, Nunchuk memiliki banyak sensor. Plus, itu sudah tersedia dan murah. Jadi, jika Anda ingin membuat lengan robot ini, sangat penting untuk mendapatkan daftar alat yang Anda butuhkan dan kodenya.
Aplikasi Android Mengontrol Lengan Robot Arduino

Lengan Robot di Lini Produksi
Lengan robot ini adalah proyek tugas lain yang dapat Anda pilih. Perangkat menggunakan modul Bluetooth bersama Arduino melalui aplikasi Android. Namun demikian, beberapa alat yang Anda perlukan untuk membuat lengan robot ini termasuk motor generik yang memiliki modul Bluetooth (HC-05) dan Arduino mega 2560.
Tangan Robotik Terkendali Nirkabel
Memilih proyek ini sangat ideal jika Anda ingin tahu apa yang diperlukan untuk membuat tangan robot. Plus, itu juga mengajarkan Anda cara mengontrol alat ini. Selanjutnya, Anda memerlukan alat seperti sensor terkait, baterai, papan Arduino, dan motor servo untuk membuat tangan robotik ini dengan sarung tangan nirkabel.
Lengan Robot Bartender Arduino

Arduino Bartender Robotic Arm
Sumber:WorldArchitecture
Lengan robot Bartender adalah proyek untuk dilompati jika Anda mencari proyek menyenangkan yang akan mengesankan para tamu. Alat ini biasanya memiliki Lengan Snapper RobotGeek. Plus, ia memiliki injektor katup—yang meningkatkan fungsi bartending-nya. Jadi, proyek ini akan berhasil dengan baik memindahkan minuman ke gelas Anda dari wadah.
Lengan Robot Arduino yang Dikendalikan Mouse Komputer
Proyek ini sangat ideal jika Anda menyukai proyek lengan Arduino yang dapat Anda kendalikan dengan mouse komputer Anda. Bagian terbaiknya adalah lengan robot Arduino ini dapat mengambil keputusan dengan memproses gambar. Bagaimana? Alat ini melakukannya dengan bantuan perangkat lunak visi Matlab.
Kata Akhir
Proyek lengan robot dengan cepat menjadi sesuatu di dunia. Dan sangat memuaskan melihat perangkat ini membawa barang, menyeimbangkan, dan menumpuk barang dengan presisi—berdasarkan jenisnya. Dan mereka sangat membantu untuk aplikasi medis dan eksplorasi ruang angkasa.

Lengan Robot di Pabrik
Jadi, ini saat yang tepat untuk membuat versi murah dari alat ini—terutama jika Anda tidak ingin menangani tugas berulang apa pun. Apakah Anda memerlukan bantuan untuk memulai? Jangan ragu untuk menghubungi kami.


