Motor Driver L293D:Cara Menghubungkannya Ke Motor DC Menggunakan Arduino
Misalkan Anda berniat mendesain robot atau mobil mainan, pengetahuan tentang motor adalah yang terpenting. Cara yang sangat hemat biaya dan mudah untuk mengontrol motor ini adalah dengan menggunakan pelindung motor driver L293D. Lebih baik lagi, gunakan dalam antarmuka dengan mikrokontroler seperti Arduino.
Di antara yang lain, driver motor L293D adalah salah satu chipset paling populer dari jenisnya. Terlebih lagi, untuk aplikasinya yang beragam dalam pembuatan elektronik seperti servos, stepper, dan motor DC. Namun, atribut penting tampaknya menjadi arah dan kontrol kecepatan dalam dua motor DC independen. Dan itulah yang Anda pelajari lebih jauh di bawah instruksi ini.
1. Apa itu Driver Motor L293D?
Chipset 16-pin ini adalah driver H-bridge dua saluran untuk motor. Seringkali, fungsi utamanya adalah sebagai antarmuka pengontrol untuk pasangan motor DC atau dalam satu motor stepper.
Secara default, chipset pelindung driver motor L293D hadir dalam dua. Oleh karena itu, ia mampu menggerakkan empat motor DC. Oleh karena itu, chipset L293D merupakan aset bangunan yang berharga dalam robot beroda empat.
Secara total, perisai memberi Anda empat H-jembatan. Oleh karena itu, setiap h-jembatan memberikan arus motor sebesar 0,6A. Juga, register geser 74HC595 adalah fitur keamanan. Register ini, sebagai hasilnya, memperluas delapan pin kontrol dari IC L293D ganda ke pin empat digit Arduino.

(Driver motor L293D 16-pin H-jembatan empat kali lipat arus tinggi).
2. Fitur Pengemudi Motor l293D
Beberapa fitur yang menjadikan driver motor L293D sebagai komponen yang baik dalam proyek CNC dan robot meliputi:
- Ini memungkinkan Anda mengontrol arah dan tingkat kecepatan di perangkat yang diterapkan.
- Lebih menarik lagi, pengemudi memungkinkan untuk menjalankan dua motor DC ganda yang serupa.
- Tegangan motor, Vs. (Vcc2) berada di antara 4.5V dan 36V.
- Juga, arus motor kontinu maksimumnya adalah 600mA.
- Di sisi lain, arus motor puncak maksimum adalah 1,2A.
- Tegangan suplai Vss(Vcc1) berkisar antara 4,5V dan 7V.
- Waktu transisi paling lama 300ns antara 5V hingga 24V.
- Dengan aktivasi termal, dimungkinkan untuk melakukan penonaktifan otomatis.
- Akhirnya, IC tersedia dalam paket SOIC, DIP, dan TSSOP.
3.L293D Konfigurasi pin Output Perisai Pengemudi Motor
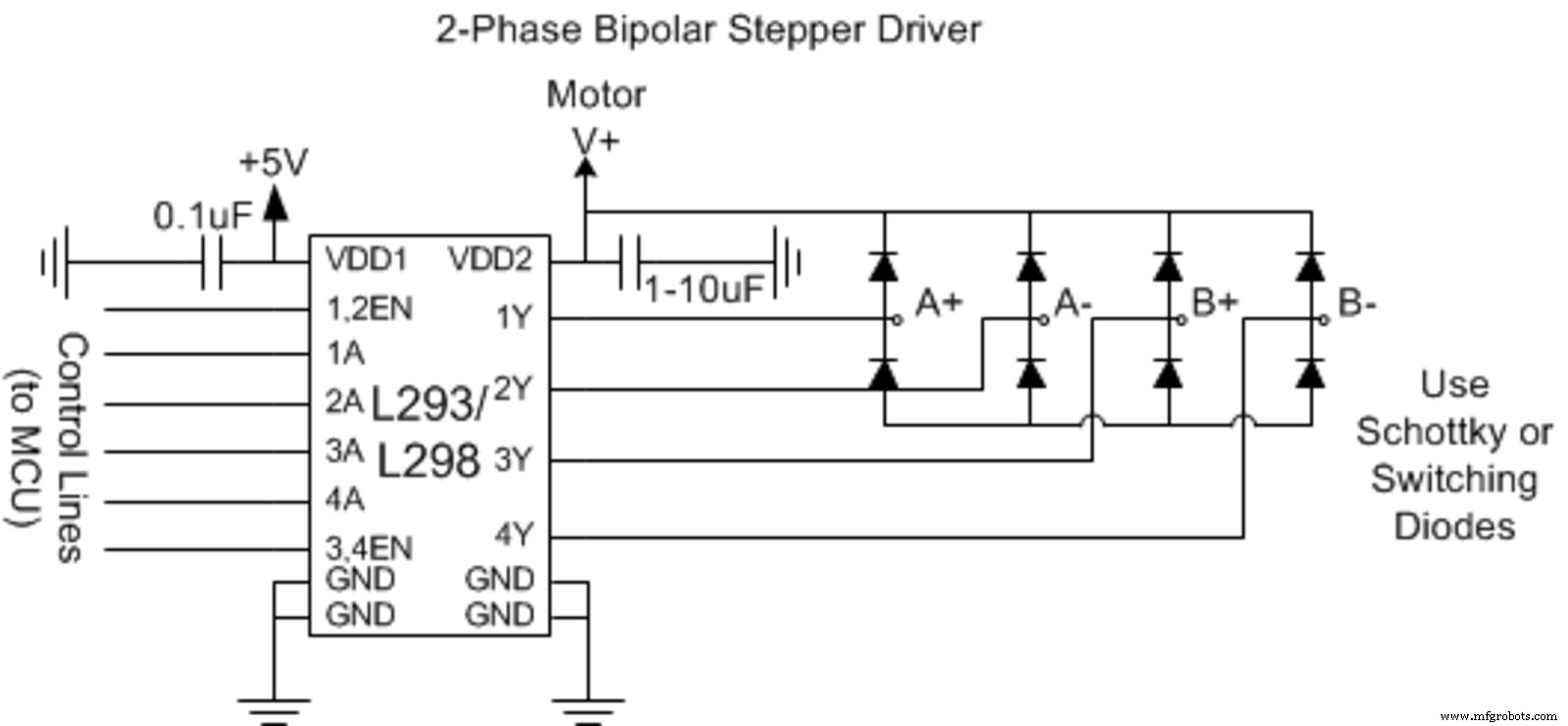
(Diagram pin skematis menunjukkan driver motor stepper L293D bipolar).
| Nomor Pin | Nama Pin | Deskripsi Pin |
| 1 | Aktifkan 1,2 | Terminal ini mengaktifkan pin input:Input 1(2) dan Input 2(7). |
| 2 | Masukkan Pin 1 | Ini berfungsi sebagai kontrol langsung untuk Output 1 pin. Seringkali, Anda menemukannya berlaku dalam kontrol sirkuit digital. |
| 3 | Pin Keluaran 1 | Pin ini terhubung ke salah satu ujungnya, Motor 1. |
| 4 | Tanah | Di satu ujung, pin ini menuju ke ground sirkuit (0V). |
| 5 | Tanah | Kami memiliki pin Ground (0V) lainnya di sisi lain. |
| 6 | Pin Keluaran 2 | Seperti pada Pin Output 1, terminal ini terhubung ke ujung lain dari Motor 1. |
| 7 | Masukkan Pin 2 | Ini langsung mengontrol pin Output 2. Ini juga berlaku dalam kontrol sirkuit digital. |
| 8 | Vs. (Vcc2) | Dengan rating 4.5V-36V, ini terhubung ke pin tegangan dan memasok motor. |
| 9 | Aktifkan 3,4 | Terminal ini hanya mengaktifkan pin input:Input 3(10) dan Input 4(15). |
| 10 | Masukkan 3 | Ini menawarkan kontrol langsung untuk pin Output 3. Selain itu, ini berfungsi sebagai outlet kontrol sirkuit digital lainnya. |
| 11 | Keluaran 3 | Pin ini terhubung ke salah satu ujung Motor 2. |
| 12 | Tanah | Di sini, pin Ground menghubungkan ground sirkuit (0V) |
| 13 | Tanah | Namun pin Ground lainnya terhubung ke ground sirkuit (0V) |
| 14 | Keluaran 4 | Seperti Output 3, pin ini juga menuju ke ujung Motor 2 yang lain. |
| 15 | Masukkan 4 | Pada bagian ini, ia menawarkan kontrol langsung untuk pin Output 4. Ini juga berfungsi sebagai kontrol sirkuit digital. |
| 16 | Vss (Vcc2) | Akhirnya, pin terhubung ke tegangan eksternal +5V yang bertanggung jawab untuk memasok IC. |
4. Prinsip Kerja Driver Motor L293D
Seperti yang disorot sebelumnya, driver motor L293D dapat mengontrol motor DC ganda. Oleh karena itu, penting untuk memahami cara kerja IC jembatan-H dua saluran ini.
(Diagram yang menunjukkan motor unipolar 5 volt yang terhubung dengan L293D).
Tahap pertama dari prinsip kerja melibatkan pengaturan jembatan-H. Dengan kata lain, ia menggunakan pasangan transistor Darlington ganda yang kami sebut Q2/Q3 dan Q1/4. Di seberang masing-masing, sebuah dioda terhubung dengan kolektor dan emitor transistor. Akibatnya, ini mencegah EMF balik yang dihasilkan motor dari merusak transistor.
Jadi, ketika transistor Q1/Q4 dalam posisi ON, transistor Q2/Q3 padam. Jadi, ada aliran arus dari Vcc, melintasi motor, dan ke tanah.
Tindakan ini mendorong putaran searah jarum jam/berlawanan arah jarum jam dari motor. Singkatnya, polaritas motor dan mode koneksi ke catu daya menentukan arah putaran.
Di sisi lain, ketika transistor Q1/Q4 OFF, Q2/Q3 ON secara otomatis. Jadi, ada kebalikan arus yang mengalir melalui motor. Jadi, saat arus balik ini mengalir, arah putaran motor juga bergantian.
5. Bagaimana Kami Menggunakan Driver Motor L293D?
Seperti disebutkan sebelumnya, driver motor L293D menggunakan arus penggerak dua arah sekitar 600mA dan kisaran 4.5V-36V. Namun, fitur ini melibatkan penggunaan chip driver motor 16-pin ini dengan Arduino Uno.
Oleh karena itu, kami memperkenalkan proyek yang menghubungkan motor DC dan L293D ke ARDUINO. Jadi, berikut adalah prosedur bertahap untuk mengatur rangkaian yang mengontrol arah dan kecepatan motor DC.
Langkah Pertama:Kumpulkan bahan yang Anda butuhkan untuk proyek.
- Dua potensiometer 10K.
- Chipset driver motor L293D.
- Dua motor DC kecil.
- Arduino Uno atau Arduino Pro Mini.
- Breadboard.
- Kabel jumper.
Langkah Kedua:Menyiapkan Sirkuit
Koneksi yang terlibat dalam rangkaian ini cukup mudah.
Namun, kami menggunakan tutorial video untuk mengatur sirkuit agar ilustrasinya lebih tepat.
Motor seringkali lebih baik dengan catu daya yang berbeda sama sekali. Dalam hal ini, kami menggunakan 12V untuk mesin. Di sisi lain, catu daya 5V memberi daya pada L293D dan Arduino.
Catatan:Sumber daya eksternal masuk ke Pin 8 dari L293D. Ambil tindakan pencegahan saat membuat koneksi ini. Jika tidak, Anda berisiko merusak motor.
Langkah Tiga:Kode Untuk Memprogram motor DC
Kami akan melakukan itu, dan dua langkah dasar diperlukan.
Instal perpustakaan AFMotor.h.
Pertama-tama, kita membutuhkan media komunikasi dengan IC L293D. Untuk itu, kita harus menginstal library AFMotor.h.
Library ini memungkinkan kita untuk mengeluarkan perintah yang mengontrol motor DC, solenoida, dan stepper.
Untuk menginstal perpustakaan AFMotor.h, pertama, gulir ke Sketch. Kemudian, temukan "Sertakan Perpustakaan," setelah itu Anda temukan "Kelola Perpustakaan." Manajer perpustakaan memperbarui daftar perpustakaan yang diinstal saat manajer perpustakaan mengunduh indeks.
Setelah itu, gunakan filter pencarian untuk menemukan '"Motor Shield." Di antara entri, pilih Adafruit Motor Shield Library oleh Adafruit, lalu klik Instal.
Jalankan Kode Arduino
Selanjutnya, kita harus menjalankan kode Arduino di bawah ini:
#include
AF_DCMotor motor(4);
batalkan pengaturan()
//Menyetel kecepatan mulai untuk motor &berhenti
motor.setSpeed(200);
motor.run(RELEASE);
}
void loop()
uint8_t i;
// Nyalakan motor
motor.run(FOWARD);
// Akselerasi dari 0 ke kecepatan maksimal
untuk (i=0; i<255; i++)
motor.setSpeed(i);
penundaan (10);
}
// Kurangi kecepatan dari kecepatan maksimal ke 0
untuk (i=255; i!=0; i–)
motor.setSpeed(i);
penundaan (10);
}
// Kemudian, ubah arah motor
motor.run(BACKWARD);
// Akselerasi dari 0 ke kecepatan maksimal
untuk (i=0; i<255; i++)
motor.setSpeed(i);
penundaan (10);
}
// Kurangi kecepatan dari kecepatan maksimal ke 0
untuk (i=255; i!=0; i–)
motor.setSpeed(i);
penundaan (10);
}
// Sekarang matikan motor
motor.run(RELEASE);
penundaan(1000);
}
Langkah 4:Penyiapan Selesai
Pada tahap ini, pengaturan sirkuit DIY Anda selesai. Anda sekarang memiliki mekanisme kontrol untuk perangkat motor DC apa pun yang menggunakan chip L293D ini dan mikrokontroler Arduino Uno.
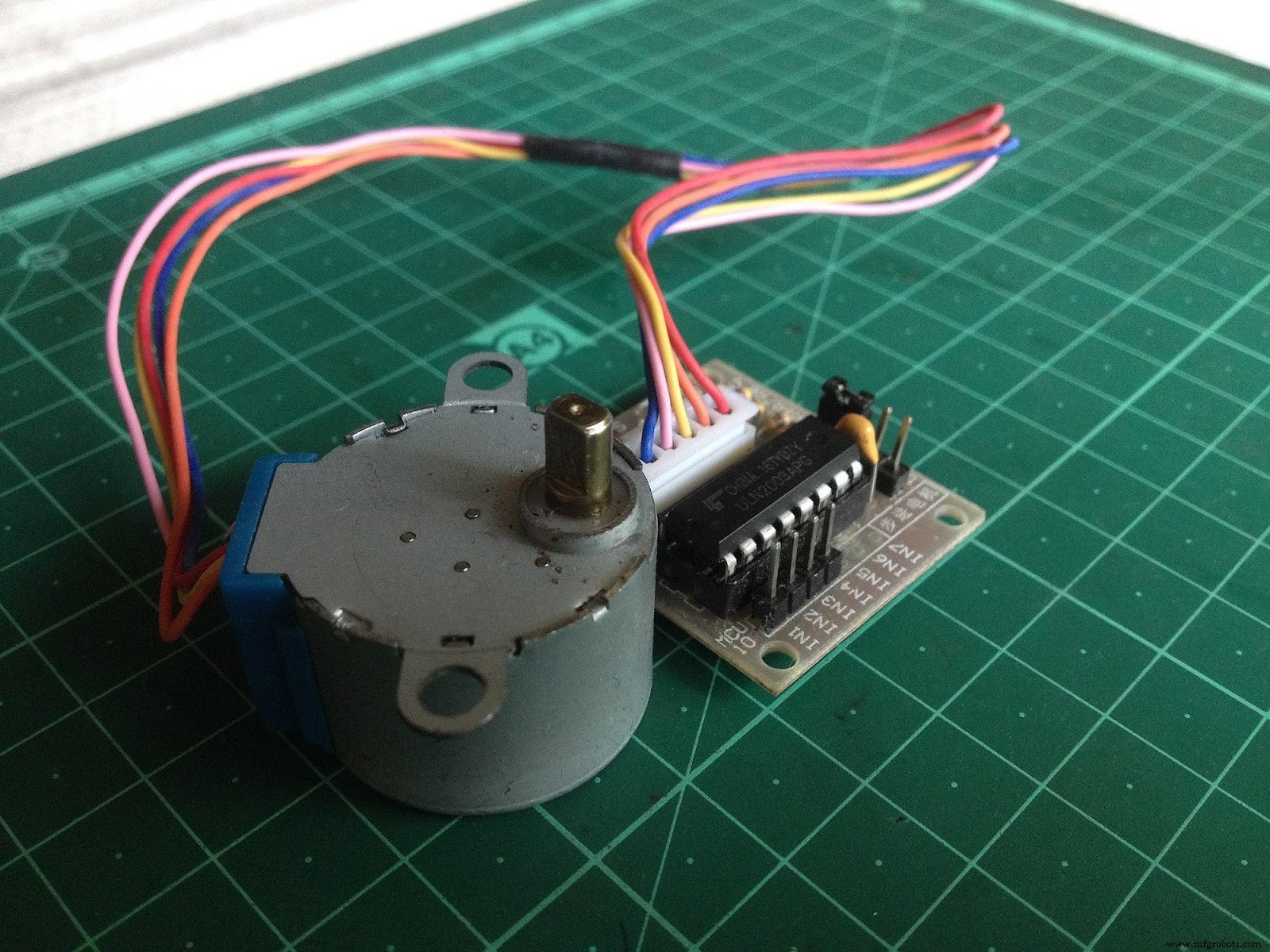
6.L293D Setara Dual Timer IC
IC lain yang mirip dengan L293D termasuk ULN2003, SN754410, LB1909MC.
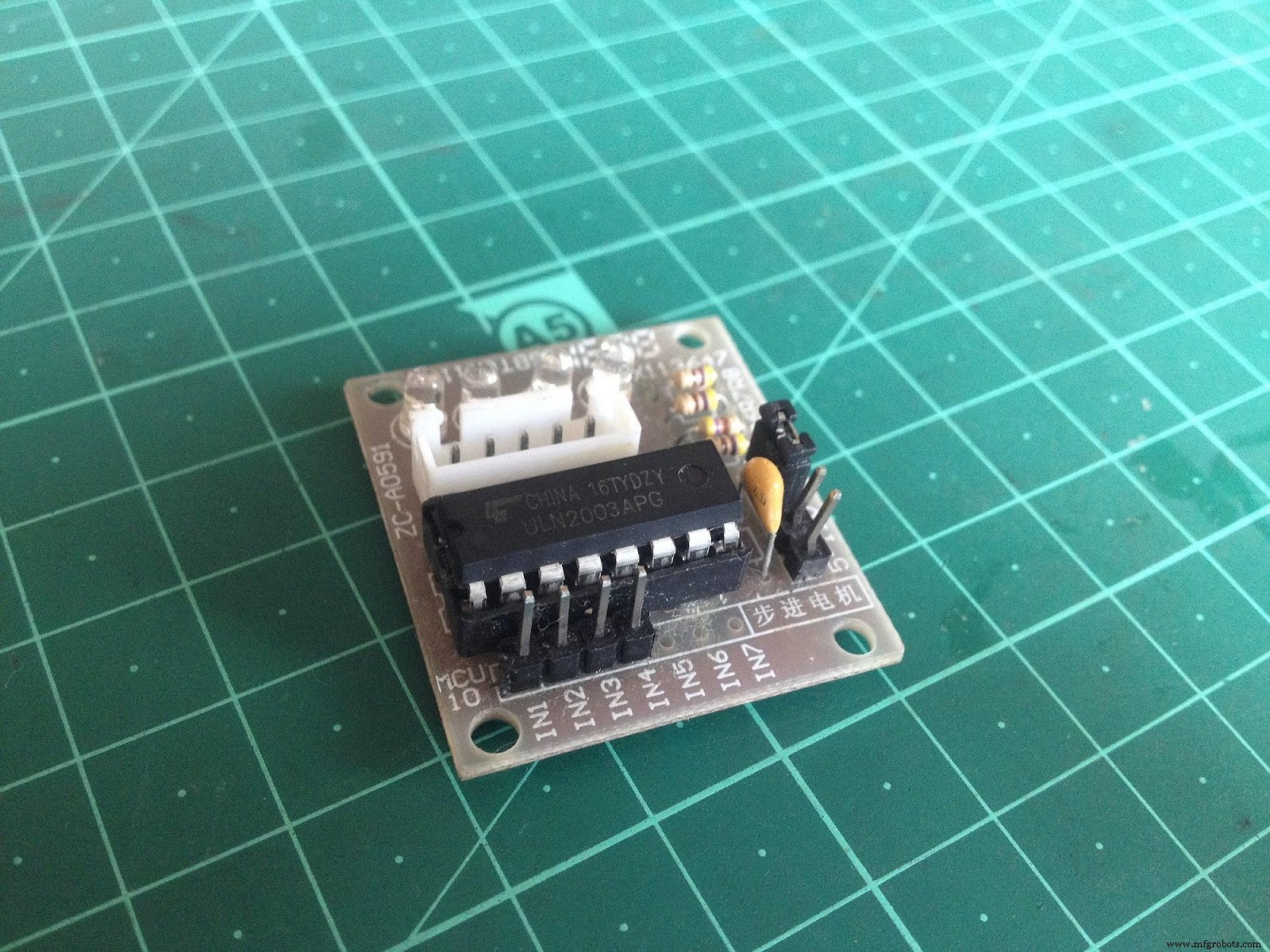
(IC ULN2003 pada PCB yang menunjukkan pin berlabel dan titik koneksi)
7. Aplikasi L293D
- Ini membantu Anda mengemudikan perangkat LED arus tinggi.
- Juga, ini dapat diterapkan pada motor arus tinggi yang dioperasikan oleh sirkuit digital seperti robot.
- Driver L293D merupakan bagian integral dari stepper dan motor secara umum.
- Untuk digunakan dalam modul driver relai. Oleh karena itu, ini memungkinkan relai penguncian.
Ringkasan
Ada metode lain yang berbeda untuk mengontrol motor DC menggunakan Arduino dengan lebih dari satu cara. Namun salah satu cara yang paling mudah adalah dengan menggunakan IC driver motor L293D. IC L293D memberikan keunggulan untuk mengontrol kecepatan dan arah dua motor DC yang terpisah secara bersamaan.
Kesimpulannya, kita telah mempelajari cara mengatur dan memprogram motor DC dengan IC ini. Tapi, mungkin, Anda ingin mencoba sesuatu yang lebih menantang. Untuk tutorial lebih lanjut tentang cara melakukannya, hubungi halaman kontak kami untuk panduan lengkap.


