

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 |
| ||||
 |
|
 |
| |||
 |
| |||
|




Hadiah pertama di Instructables Wheel Contest, juara kedua di Instructables Arduino Contest, dan runner up di Instructables Design for Kids Challenge. Terima kasih kepada semua orang yang memilih kami!!!
http://www.instructables.com/id/Joy-Robot-Rob%C3%B4-Da-Alegria-Open-Source-3D-Printed-A/
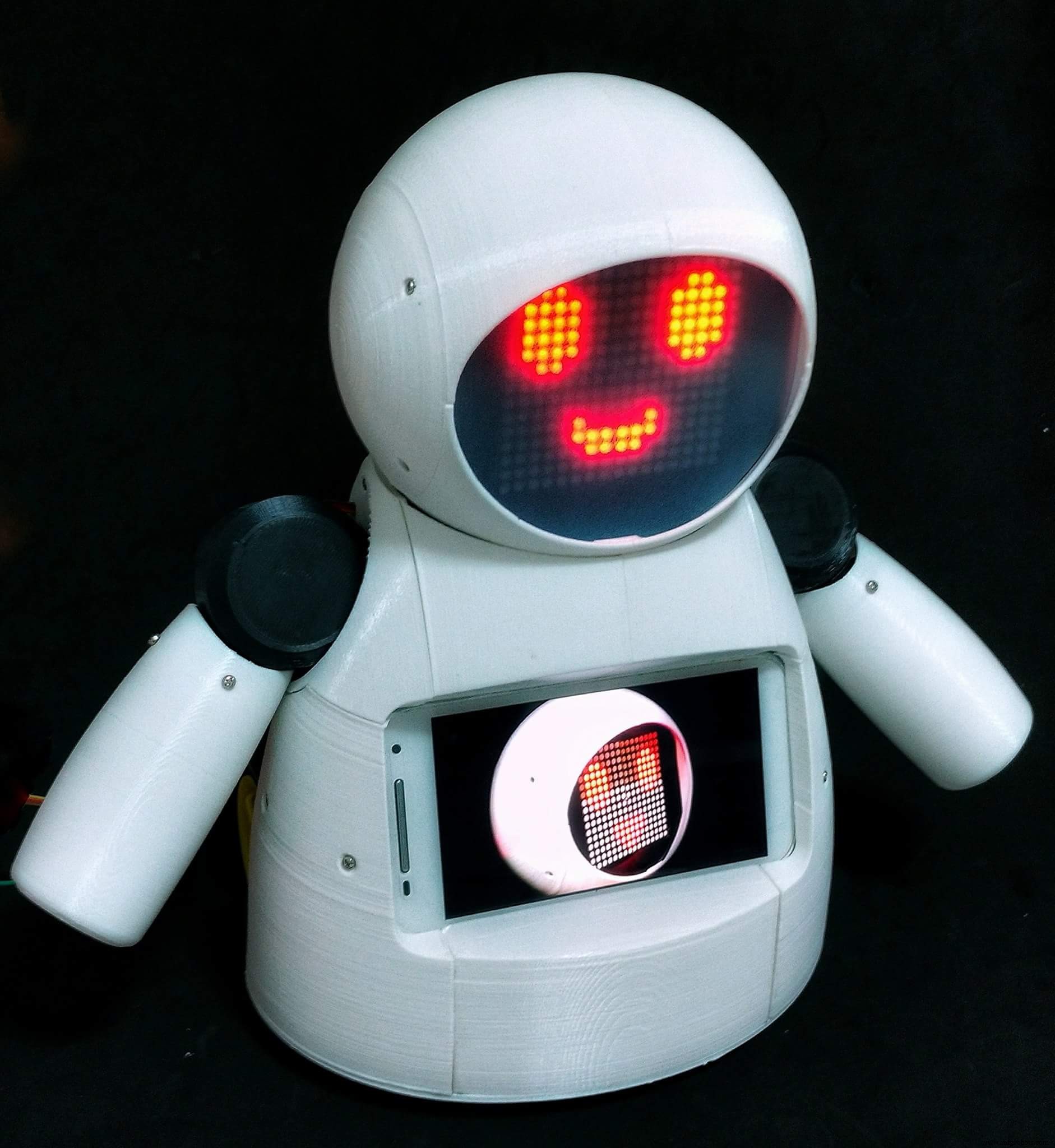
Robot ada di mana-mana. Dari aplikasi industri hingga eksplorasi bawah air dan luar angkasa. Tapi yang favorit saya adalah yang digunakan untuk kesenangan dan hiburan! Dalam proyek ini robot DIY dirancang untuk digunakan sebagai hiburan di rumah sakit anak-anak, membawa kesenangan bagi anak-anak. Proyek ini difokuskan untuk berbagi pengetahuan dan mempromosikan inovasi teknologi untuk membantu LSM yang melakukan kegiatan amal di rumah sakit anak.
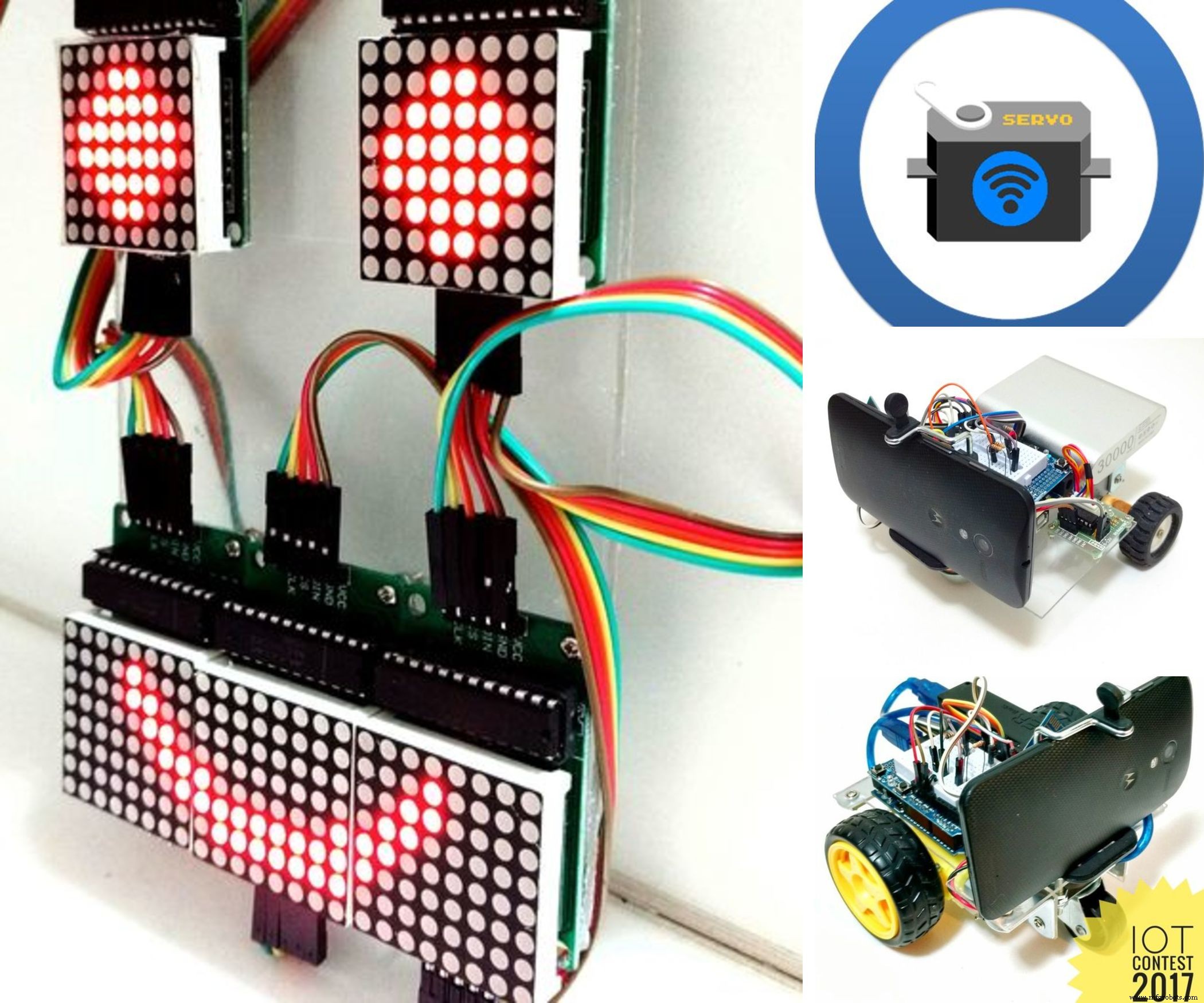
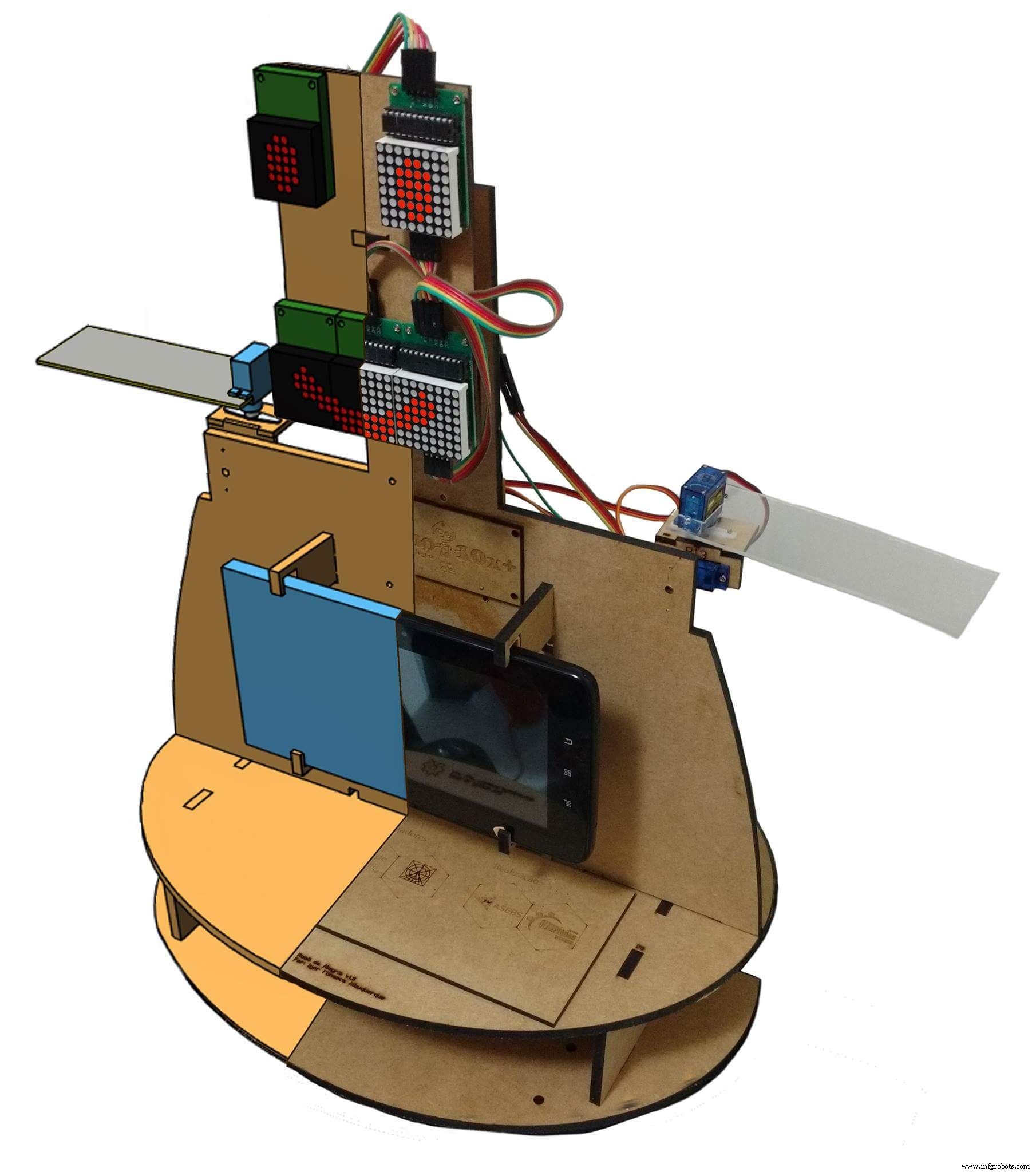
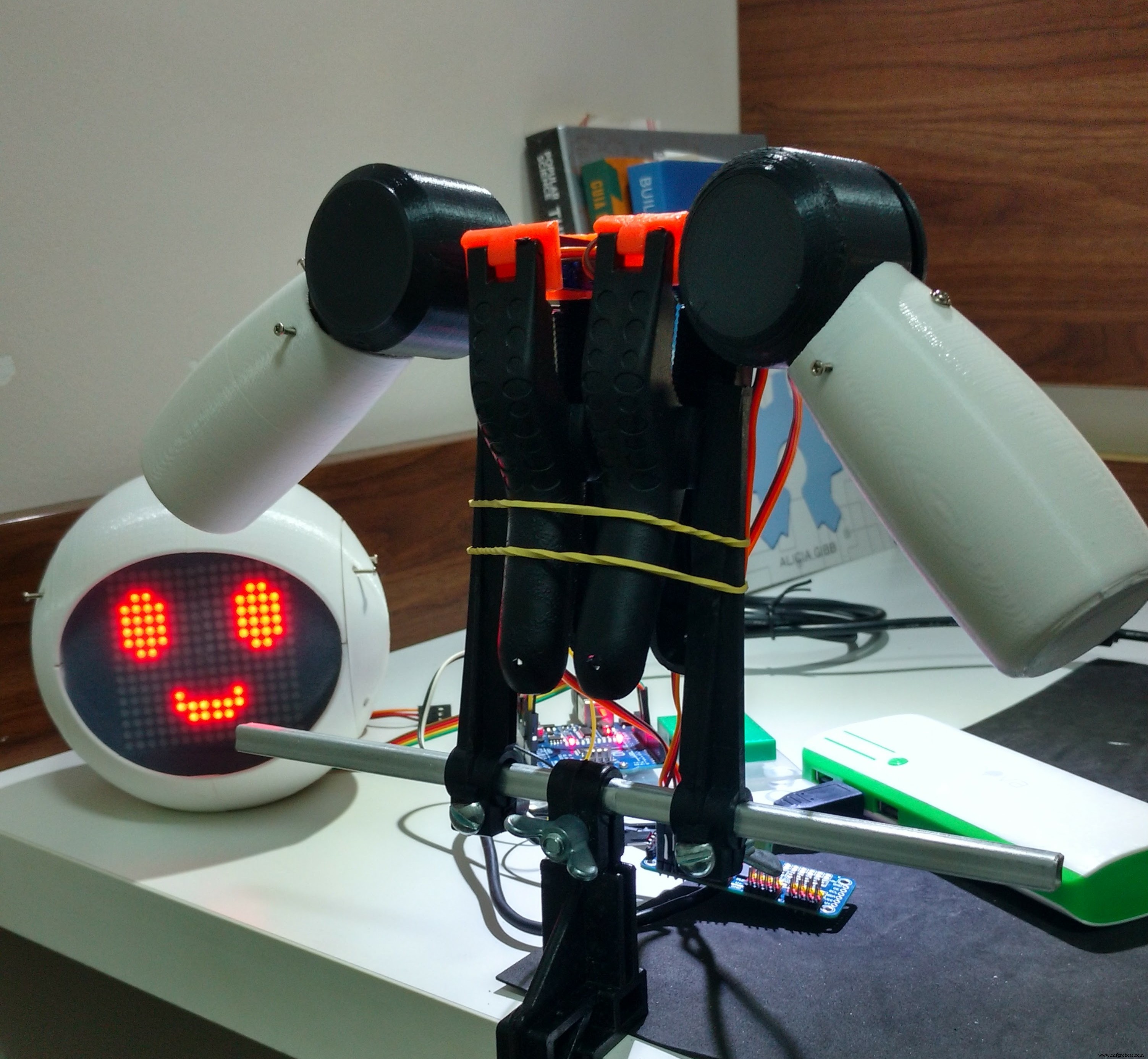
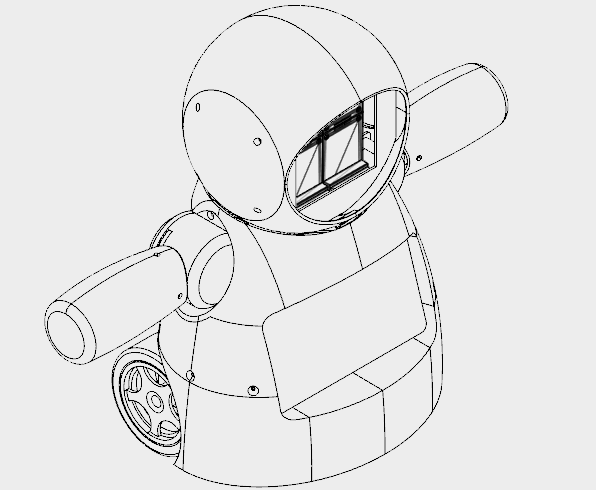
Tutorial ini menunjukkan bagaimana merancang robot humanoid yang dioperasikan dari jarak jauh, dikendalikan melalui jaringan Wi-Fi, menggunakan Arduino Uno yang terhubung ke modul Wi-Fi ESP8266. Ini menggunakan beberapa servomotor membentuk gerakan kepala dan lengan, beberapa motor DC untuk bergerak jarak kecil, dan wajah yang terbuat dari matriks LED. Robot dapat dikendalikan dari browser internet biasa, menggunakan antarmuka yang dirancang HTML. Ponsel cerdas Android digunakan untuk menyiarkan video dan audio dari robot ke antarmuka kontrol operator.
Tutorial menunjukkan bagaimana struktur robot dicetak dan dirakit secara 3D. Sirkuit elektronik dijelaskan, dan kode Arduino dirinci, sehingga siapa pun dapat mereplikasi robot.
Beberapa teknik yang digunakan untuk robot ini sudah dipublikasikan di tutorial. Silakan lihat tutorial berikut:
Terima kasih khusus kepada anggota tim lain yang terlibat dalam proyek yang disebutkan di atas, yang bertanggung jawab atas versi pertama dari kode yang disajikan dalam tutorial ini:
Temukan lebih banyak tentang proyek ini:
Bagaimana Anda bisa membantu?
Proyek ini didanai oleh anggota tim dan sumbangan kecil dari beberapa perusahaan. Jika Anda menyukainya, ada beberapa cara untuk membantu kami:
Tahukah Anda bahwa Anda dapat membeli Creality CR10mini hanya dengan $349,99? Gunakan kode kupon cr10mini3d di Gearbest dan dapatkan:http://bit.ly/2FZ5OXw
Langkah 1:Sedikit Sejarah...


Proyek 'Robô da Alegria' ('Robot Kegembiraan') lahir pada tahun 2016, di wilayah Baixada Santista (Brasil), dengan tujuan untuk mengembangkan teknologi dan menarik komunitas ke gerakan pembuat. Terinspirasi oleh proyek sukarela yang dilakukan oleh LSM di rumah sakit anak-anak, proyek ini berupaya mengembangkan robot, menggunakan perangkat keras terbuka dan perangkat lunak apen, yang mampu membawa sedikit kesenangan ke lingkungan rumah sakit anak-anak dan berkontribusi pada pekerjaan organisasi lain.
Benih dari proyek ini ditanam pada akhir tahun 2015. Setelah pembicaraan tentang penciptaan dan pengembangan teknologi yang diusung oleh Association of Startups of Baixadas Santista (ASEBS). Itu adalah sebuah proyek yang diidealkan, tanpa hadiah uang, tetapi itu menyajikan subjek di mana orang akan terlibat secara altruistik, dengan tujuan membantu orang lain.
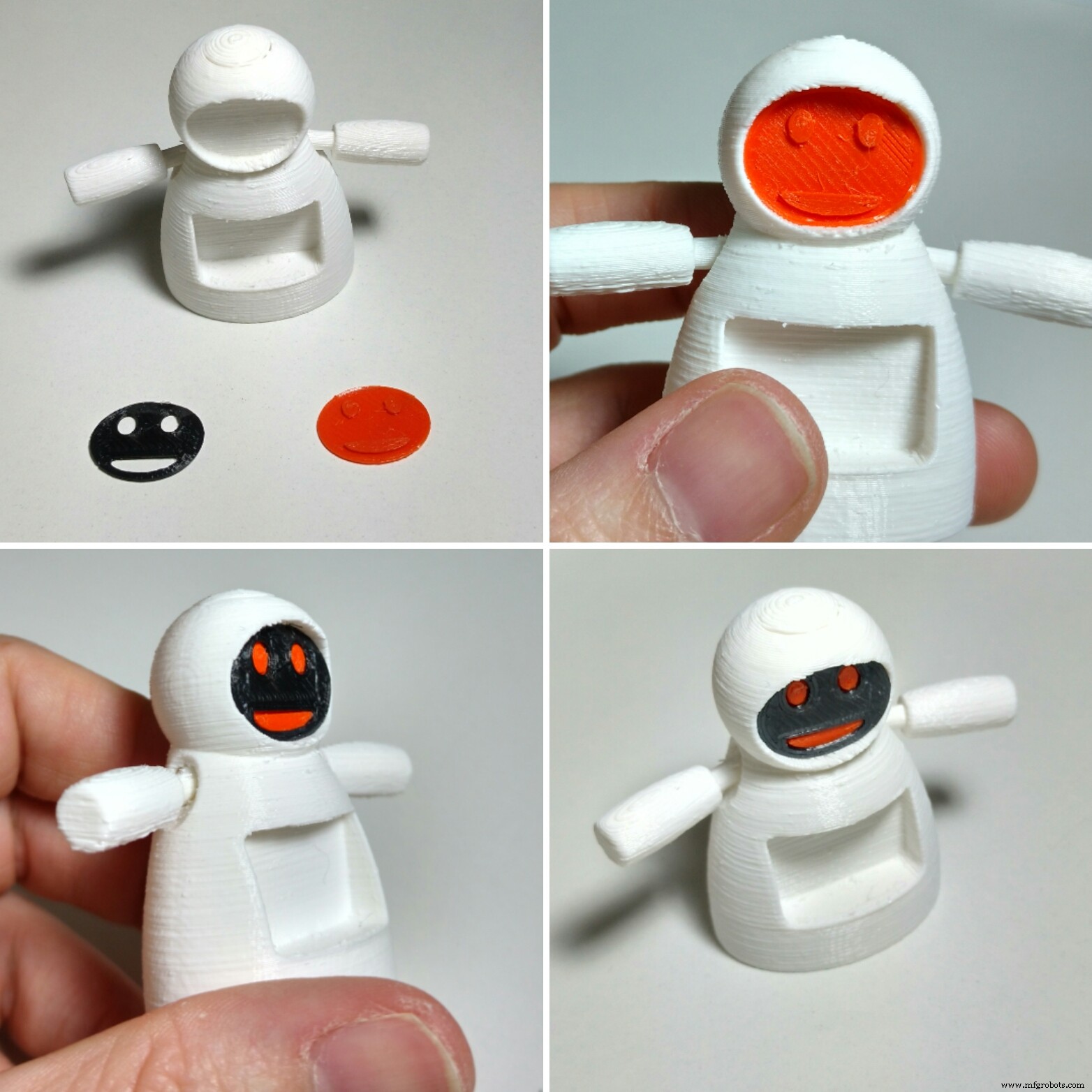
Robot mengalami transformasi beragam dari konsepsi awal hingga keadaan sekarang. Dari hanya satu kepala, dengan mata dan alis mekanis, hingga bentuk humanoid yang sekarang, beberapa iterasi dilakukan, menguji berbagai bahan konstruktif dan perangkat elektronik. Dari prototipe akrilik dan MDF yang dipotong laser, kami pindah ke bodi cetak 3D. Dari antarmuka sederhana dengan dua motor servo yang dikendalikan oleh Bluetooth, hingga bodi yang terdiri dari 6 motor servo dan 2 motor DC yang diperintah oleh antarmuka web menggunakan jaringan Wi-Fi.
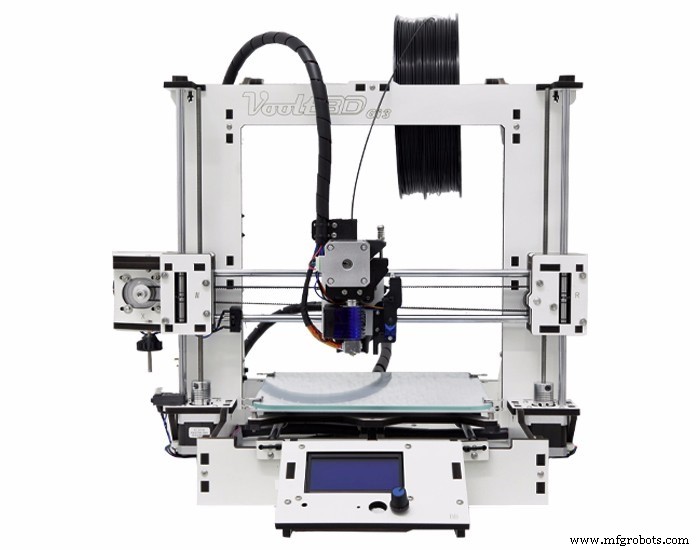
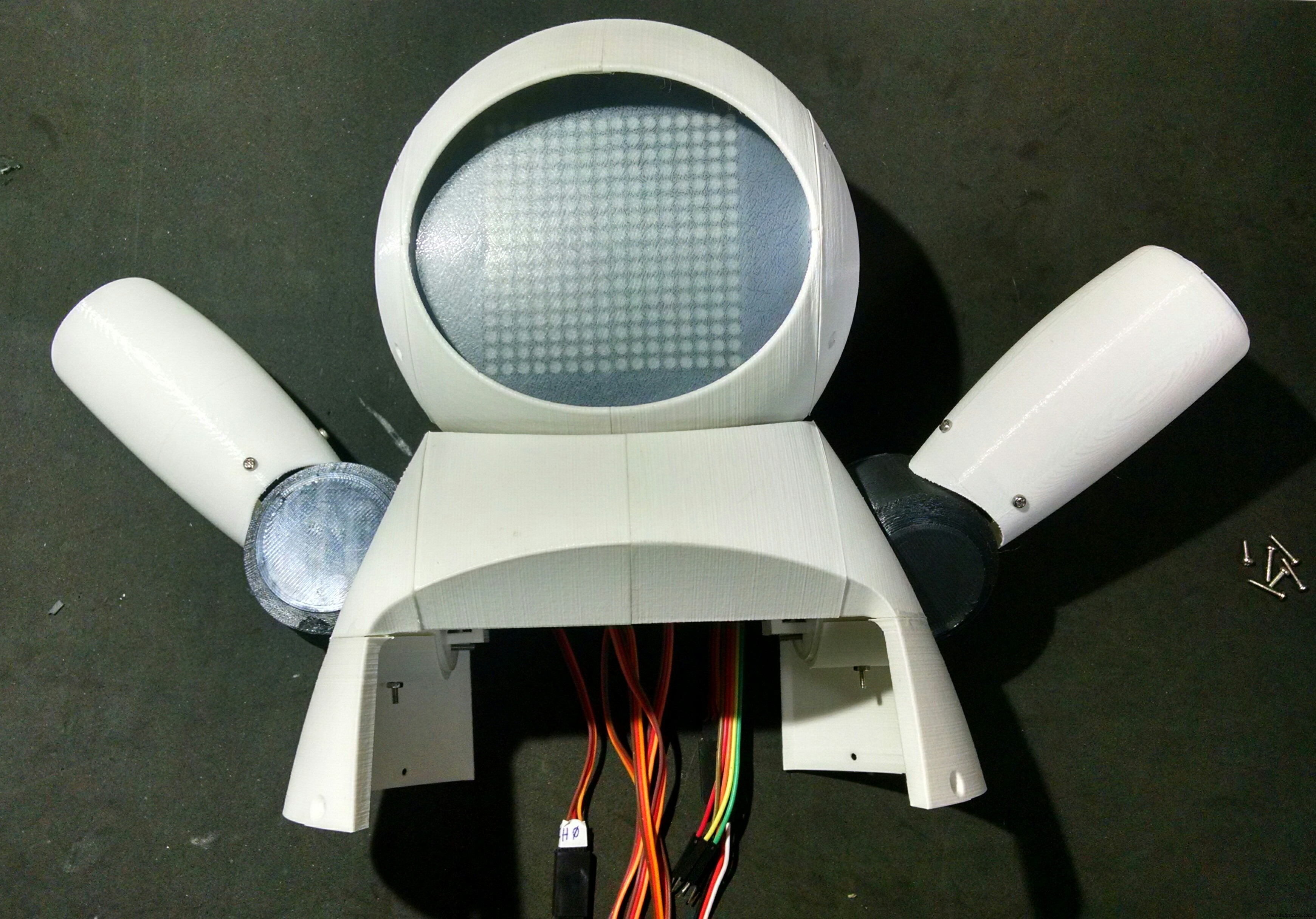
Struktur robot telah seluruhnya diproduksi dengan pencetakan 3D menggunakan Fusion 360. Untuk memungkinkan produksi replika robot di ruang pembuat atau lab luar biasa, di mana waktu maksimum penggunaan printer sangat penting, desain robot dibagi menjadi beberapa bagian. lebih kecil dari tiga jam pencetakan masing-masing. Set bagian direkatkan atau dibaut untuk pemasangan bodi.
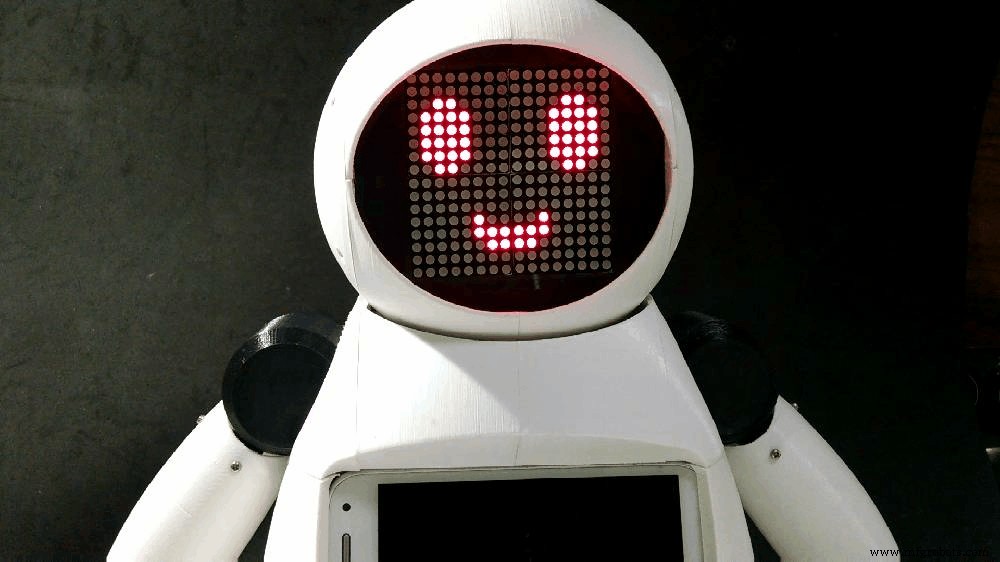
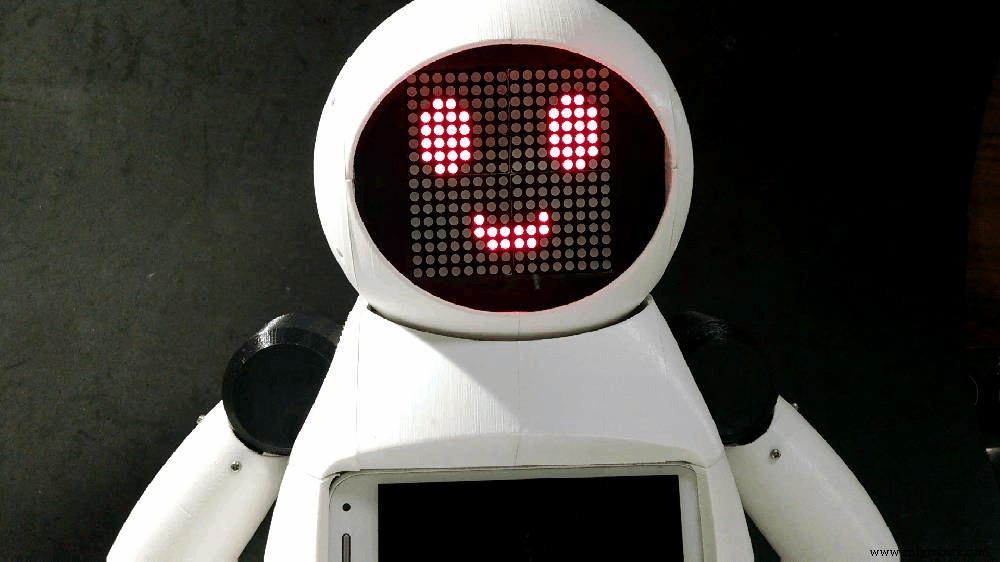
Wajahnya, terdiri dari susunan LED, memberi robot kemampuan untuk mengekspresikan emosi. Lengan dan leher yang digerakkan oleh servomotor memberikan otomat kecil mobilitas yang diperlukan untuk berinteraksi dengan pengguna. Di pusat kendali robot, Arduino Uno berinteraksi dengan semua periferal, termasuk komunikasi dengan modul ESP8266, yang memberi pengguna kemampuan untuk memerintahkan ekspresi dan gerakan melalui perangkat apa pun yang terhubung ke jaringan Wi-Fi yang sama.
Robot juga memiliki smartphone yang terpasang di dadanya, yang digunakan untuk transmisi audio dan video antara operator robot dan anak-anak. Layar perangkat masih dapat digunakan untuk berinteraksi dengan game dan aplikasi lain yang dirancang untuk berinteraksi dengan tubuh robot.
Langkah 2:Alat dan Bahan










Alat dan bahan berikut digunakan untuk proyek ini:
Alat:
Elektronik :
Mekanika:
Tautan di atas adalah saran di mana Anda dapat menemukan item yang digunakan dalam tutorial ini dan mendukung pengembangan proyek ini. Jangan ragu untuk mencarinya di tempat lain dan membeli di toko lokal atau online favorit Anda.
Tahukah Anda bahwa Anda dapat membeli Creality3D CR10mini hanya dengan $349,99? Gunakan kode kupon cr10mini3d di Gearbest dan dapatkan:http://bit.ly/2FZ5OXw
Langkah 3:Pencetakan 3D
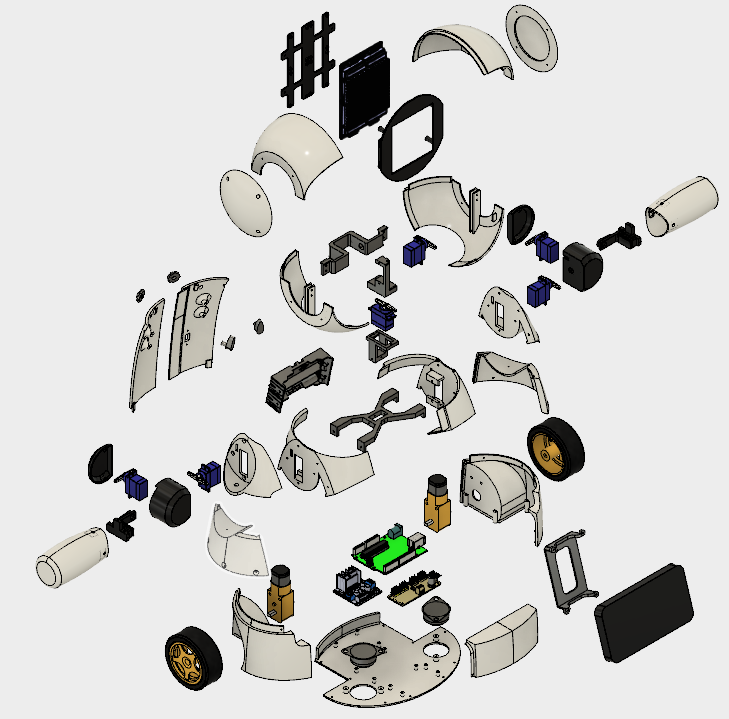
Struktur robot seluruhnya diproduksi dengan pencetakan 3D menggunakan Autodesk Fusion 360. Untuk memungkinkan produksi replika robot di ruang pembuat atau lab luar biasa, di mana waktu maksimum penggunaan printer sangat penting, desain robot dibagi menjadi beberapa bagian. lebih kecil dari tiga jam pencetakan masing-masing. Set bagian direkatkan atau dibaut untuk pemasangan bodi.
Model ini terdiri dari 36 bagian yang berbeda. Sebagian besar dicetak tanpa penyangga, dengan isi 10%.
Prosedur untuk memasang robot dijelaskan pada langkah-langkah berikut.
Anda dapat mengunduh semua file stl di situs web berikut:
Ini adalah prototipe eksperimental. Beberapa bagian memerlukan beberapa perbaikan (untuk pembaruan proyek selanjutnya). Ada beberapa masalah yang diketahui:
Jika Anda tidak memiliki printer 3D, berikut beberapa hal yang dapat Anda lakukan:
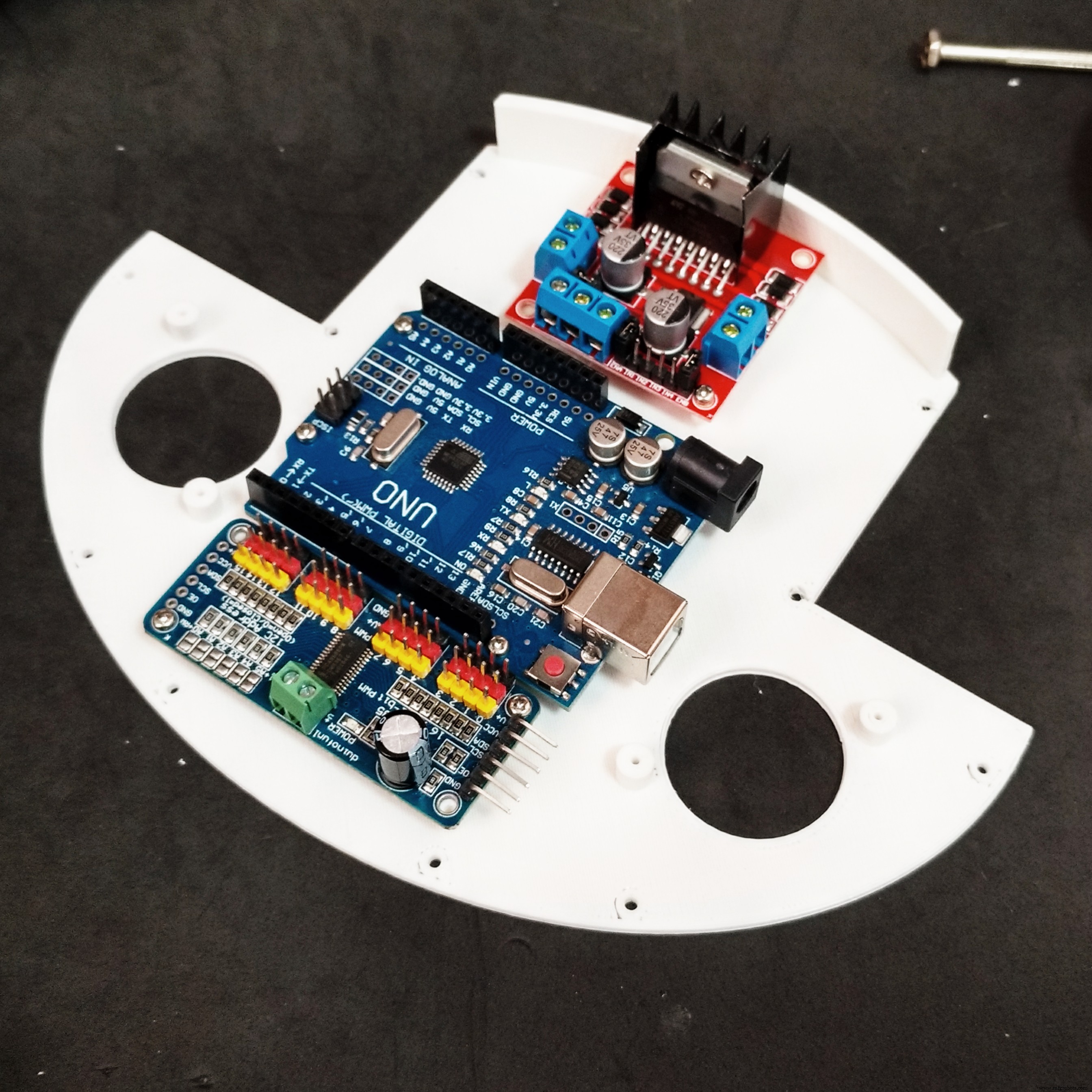
Langkah 4:Ikhtisar Sirkuit
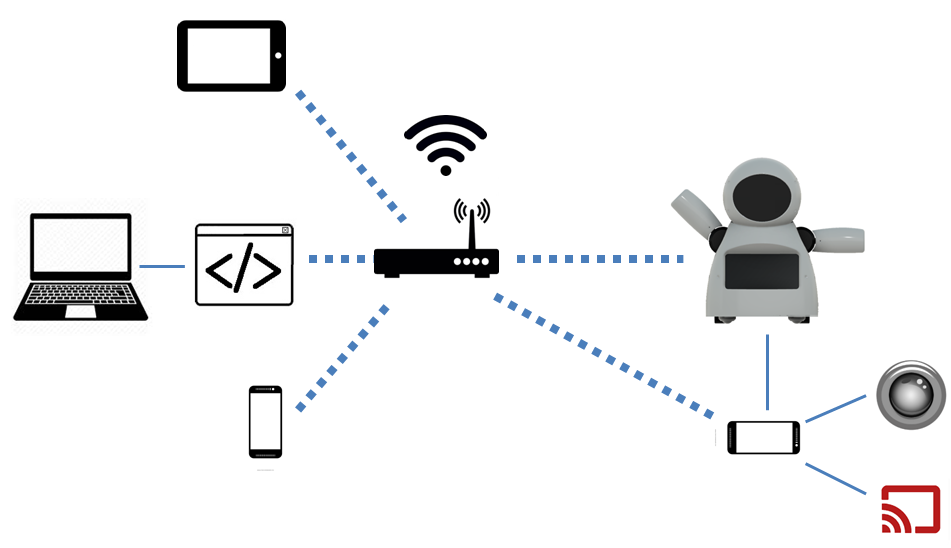
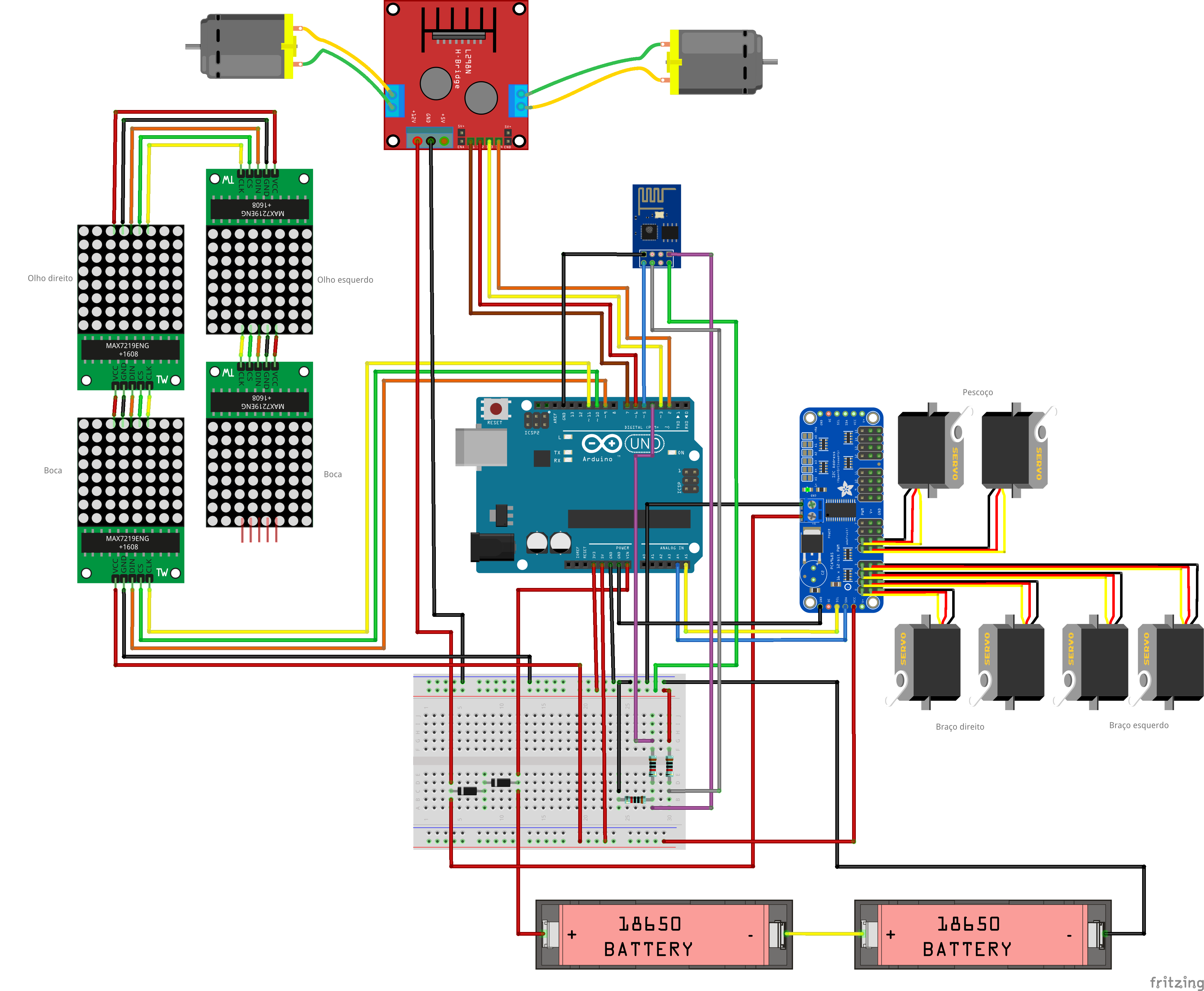
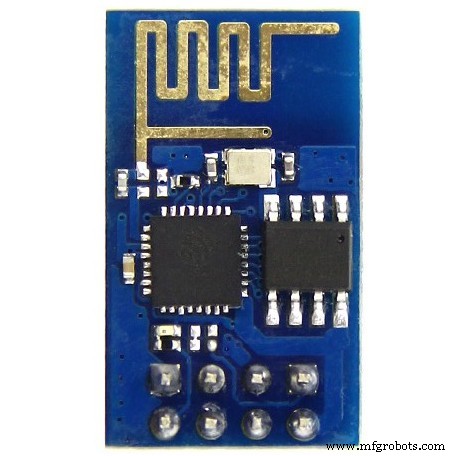
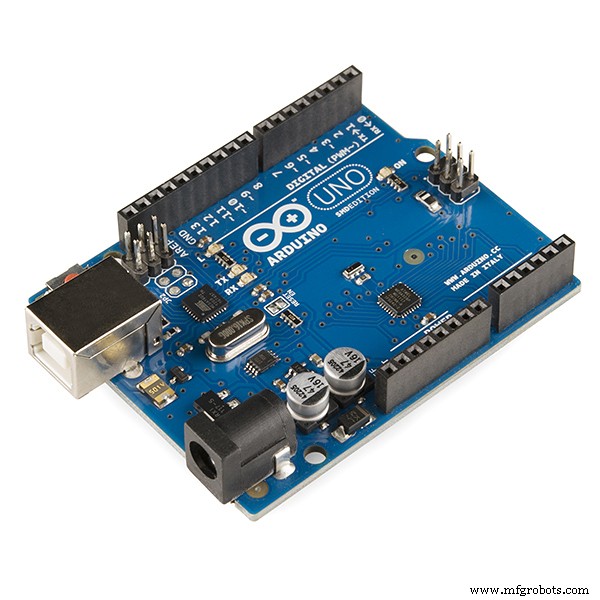
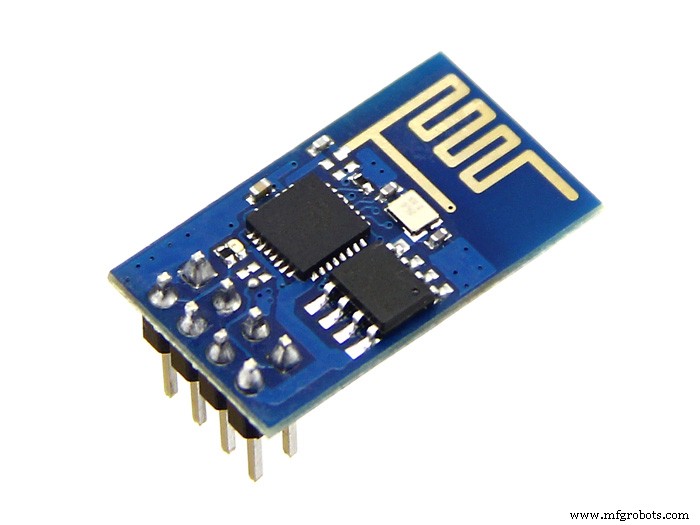
Robot dikendalikan menggunakan Arduino Uno pada intinya. Arduino menghubungkan modul ESP8266-01, yang digunakan untuk mengontrol robot dari jarak jauh melalui jaringan Wi-Fi.
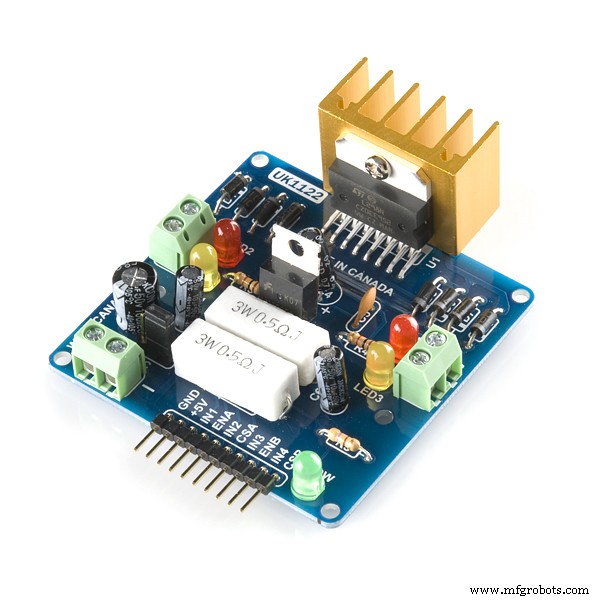
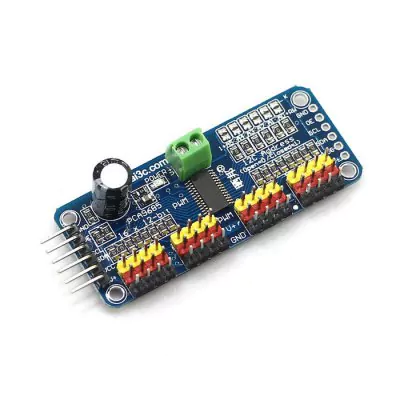
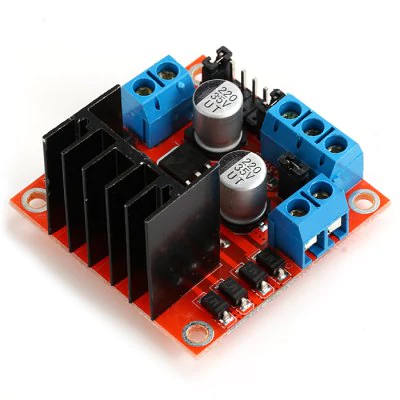
Kontroler servo 16 saluran terhubung ke Arduino menggunakan komunikasi I2C dan mengontrol 6 motor servo (dua untuk leher dan dua untuk setiap lengan). Array lima matriks LED 8x8 ditenagai dan dikendalikan oleh Arduino. Empat output digital Arduino digunakan untuk mengontrol dua motor DC, menggunakan h-bridge.
Sirkuit ditenagai menggunakan dua bank daya USB:satu untuk motor dan satu untuk Arduino. Saya sudah mencoba memberi daya pada seluruh robot menggunakan paket daya signle. Tapi ESP8266 dulu putus koneksi karena lonjakan saat motor DC dihidupkan/dimatikan.
Dada robot memiliki smartphone. Ini digunakan untuk menyiarkan video dan audio ke/dari antarmuka kontrol, yang dihosting di komputer biasa. Itu juga dapat mengirim perintah ke ESP6288, sehingga mengendalikan tubuh robot itu sendiri.
Orang mungkin memperhatikan bahwa komponen yang digunakan di sini mungkin tidak dioptimalkan untuk tujuannya. Sebuah NodeMCU dapat digunakan sebagai pengganti kombinasi Arduino + ESP8266, misalnya. Sebuah Rapsberry Pi dengan kamera akan menggantikan smartphone dan mengendalikan motor juga. Bahkan dimungkinkan untuk menggunakan smartphone Android sebagai "otak" untuk robot Anda. Itu benar... Arduino Uno dipilih karena sangat mudah diakses dan digunakan untuk semua orang. Pada saat kami memulai proyek ini, papan ESP dan Raspberry Pi yang masih relatif mahal di tempat kami tinggal... begitu kami ingin membuat dan membuat robot murah, papan Arduino adalah pilihan terbaik saat itu.
robot%2Bmk0%2B-%2Brev8_Esquem_C3_A1tico.pdf robot%2Bmk0%2B-%2Brev8_bb.pdf
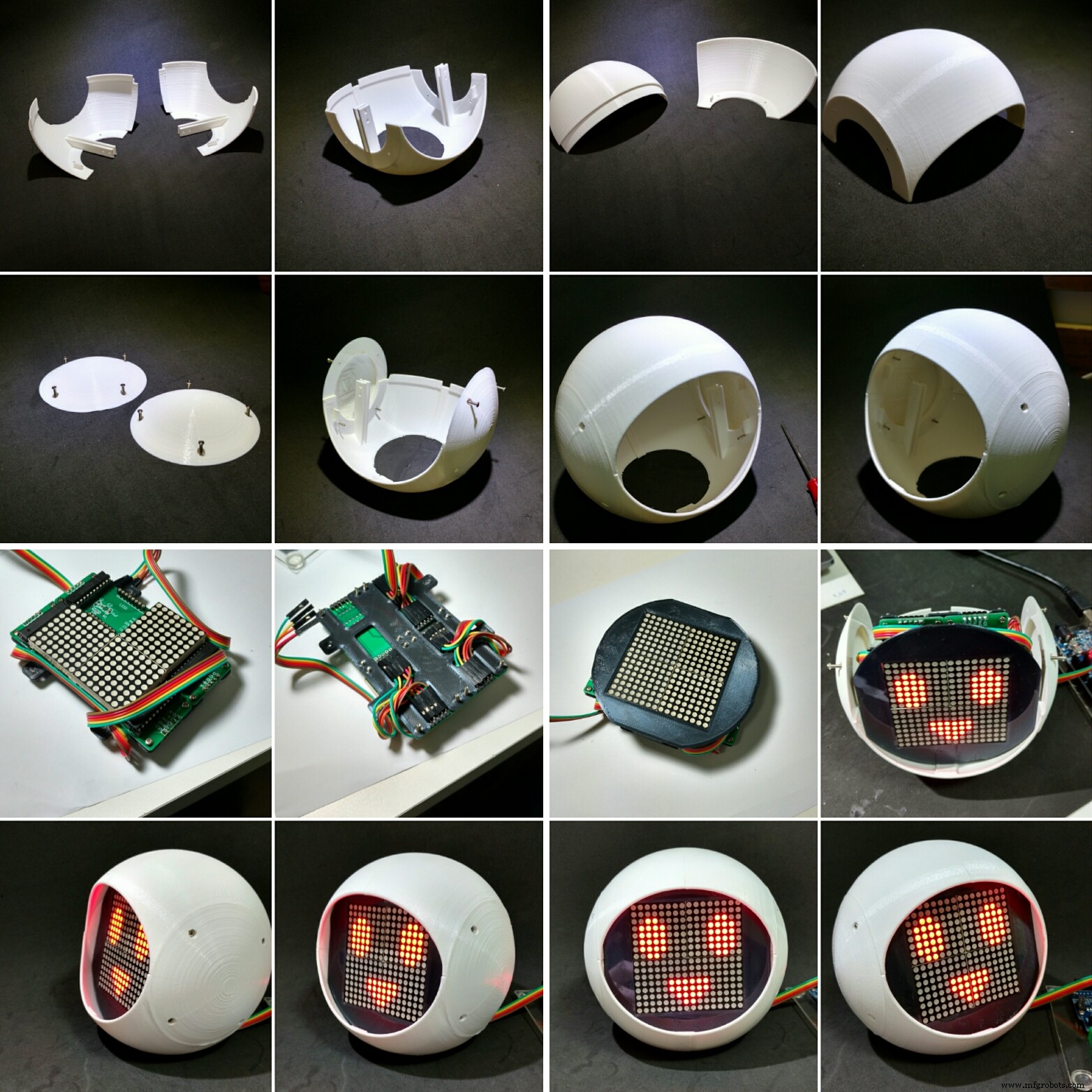
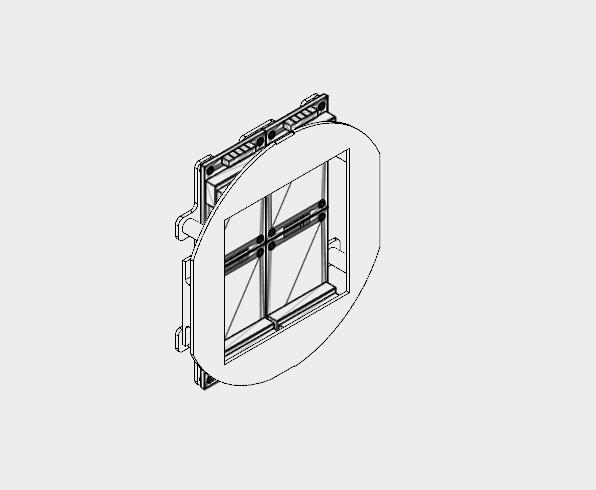
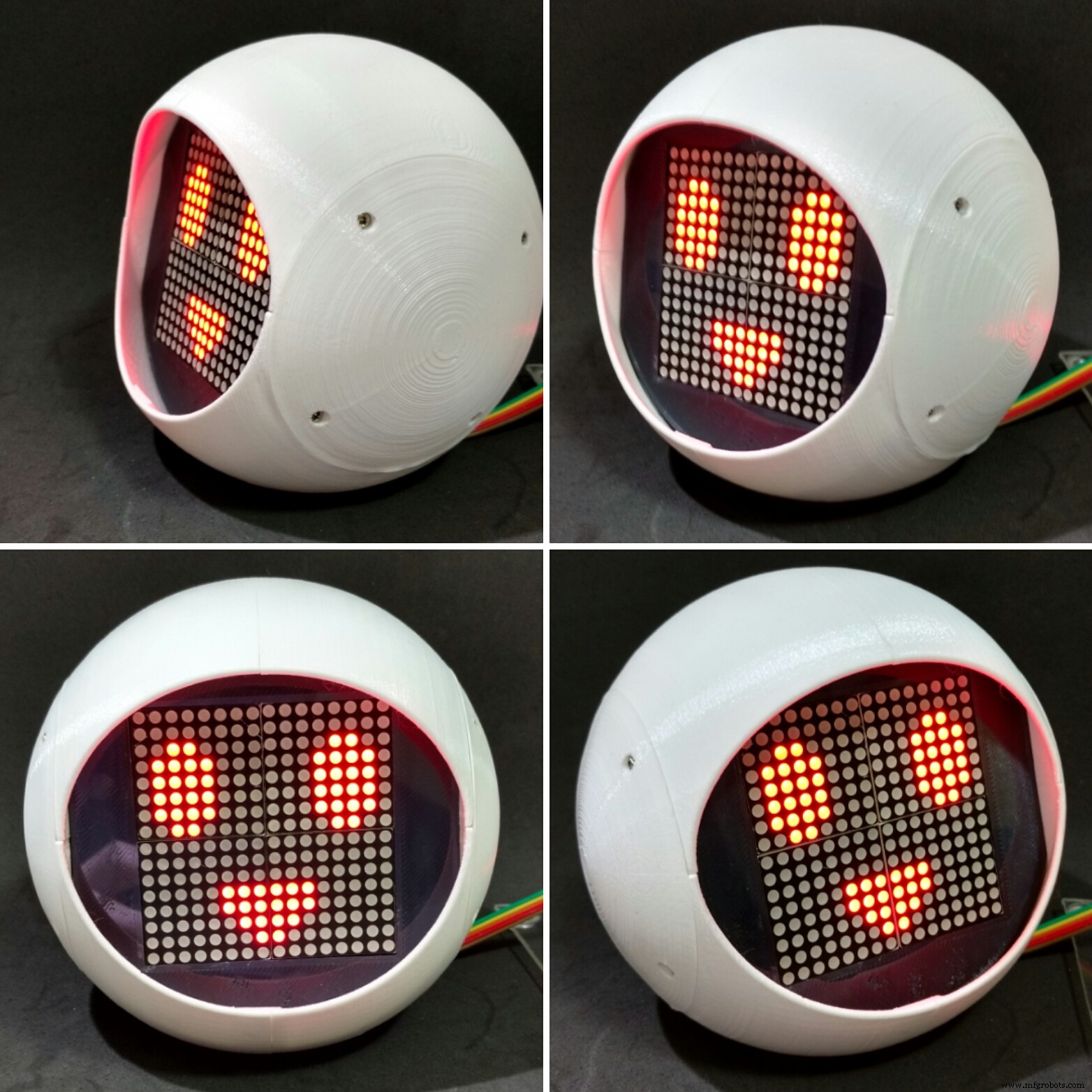
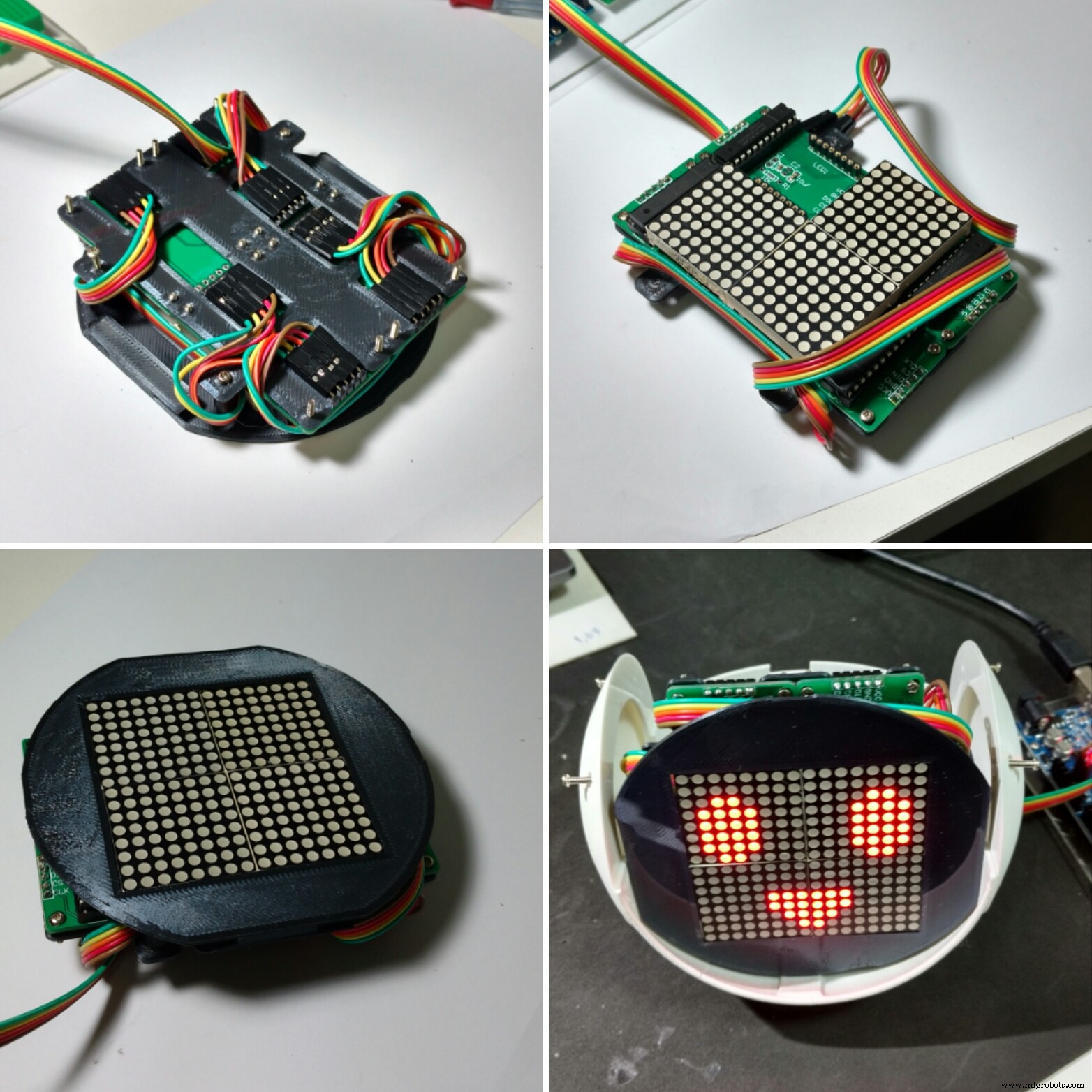
Langkah 5:Merakit Wajah
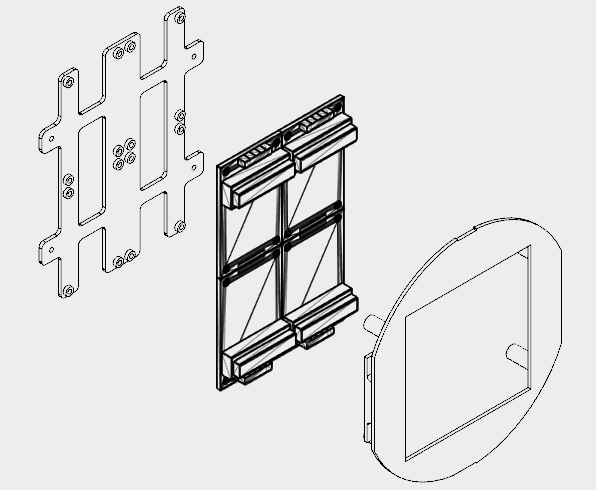
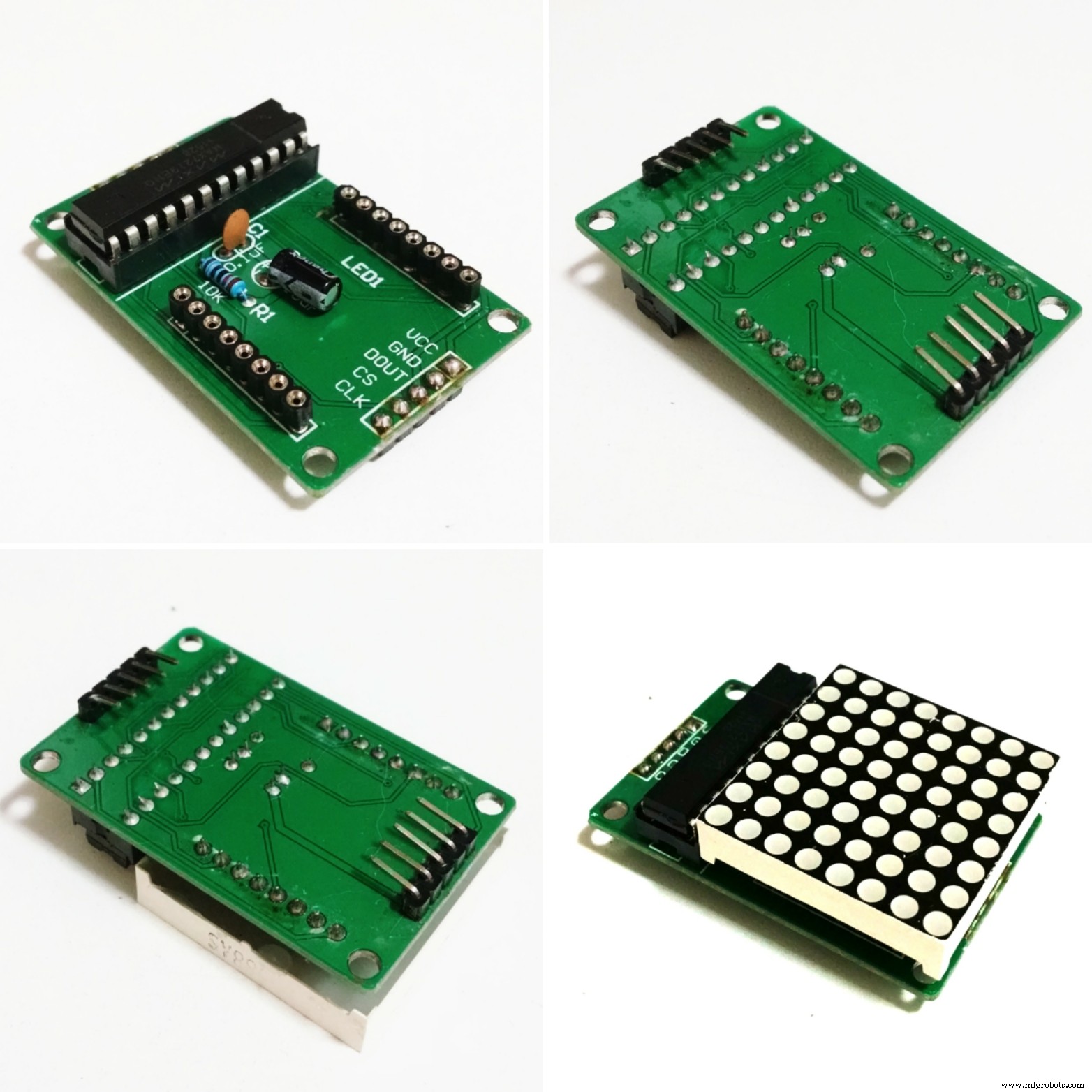
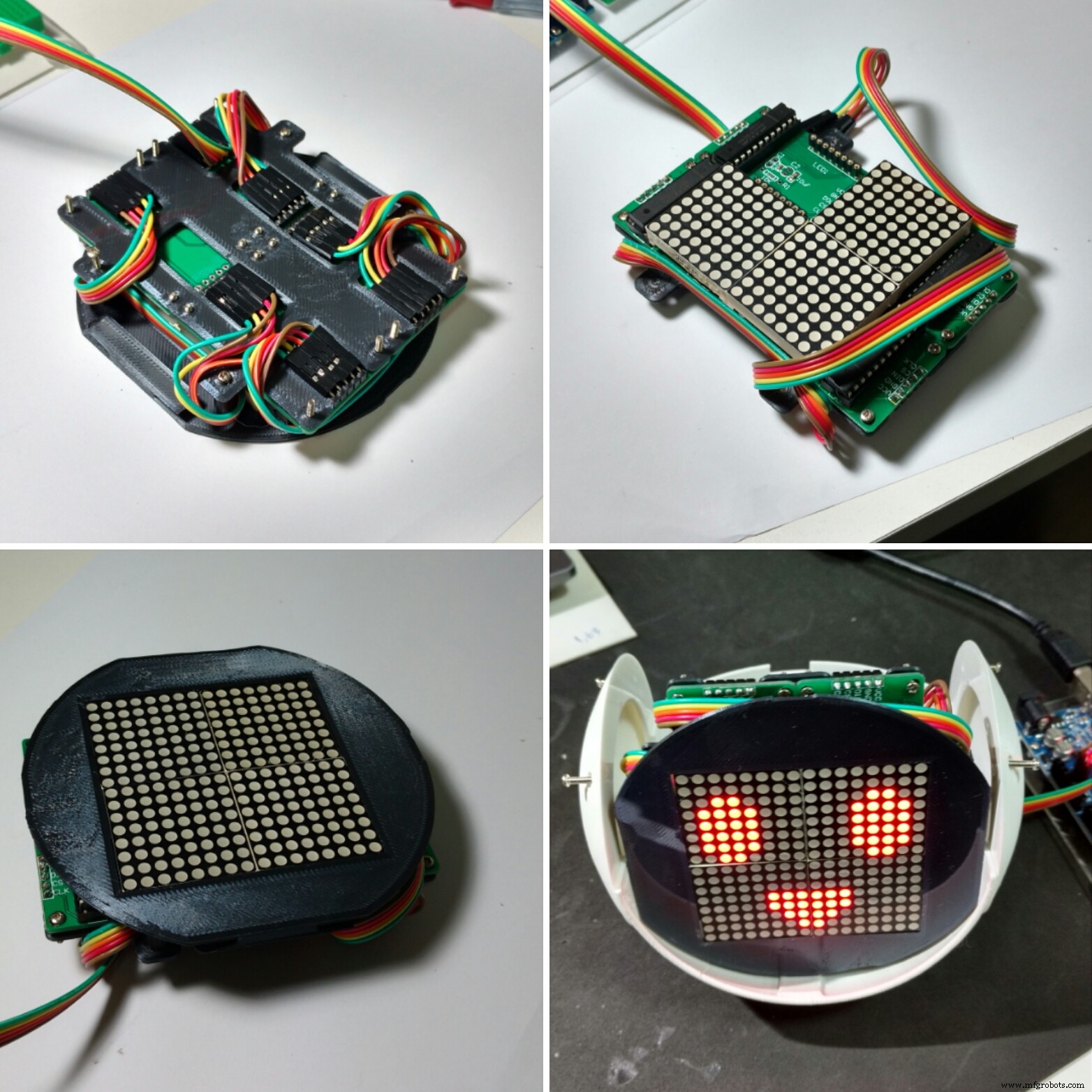
Empat matriks LED 8x8 digunakan pada wajah robot.
Strukturnya dibagi menjadi dua bagian (pelat belakang muka dan pelat muka muka) dicetak 3D menggunakan PLA hitam. Saya membutuhkan waktu sekitar 2,5 jam untuk mencetaknya secara 3D, dengan pengisian 10% dan tanpa dukungan.
Karena keterbatasan ruang, konektor matriks LED harus disolder dan posisinya diubah seperti yang dijelaskan di bawah ini:
Anda dapat melihat hasil akhir pada gambar.
Keempat matriks LED kemudian dipasang pada pelat belakang, menggunakan baut 16 M2x6mm. Pin terhubung sesuai dengan skema.
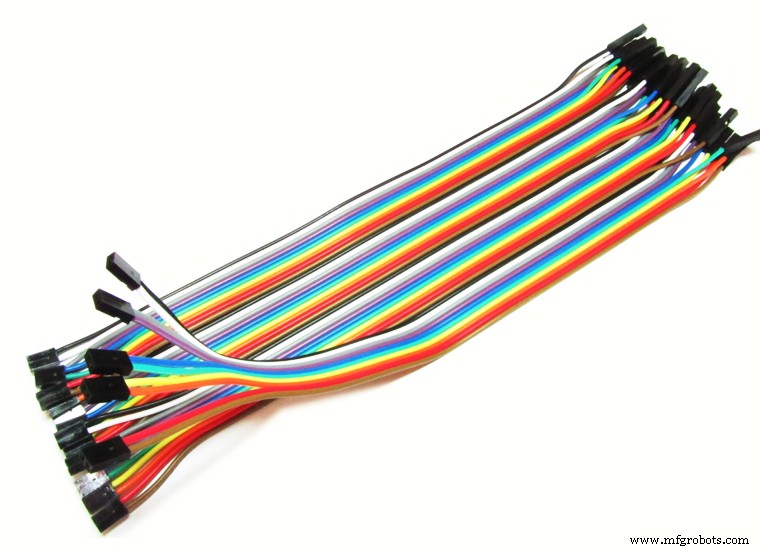
Matriks pertama dihubungkan menggunakan jumper 5 kabel male-female. Ujung male kemudian dihubungkan ke pin Arduino. Ujung perempuan terhubung pada pin input matriks. Keluaran dari setiap matriks dihubungkan ke masukan matriks berikutnya menggunakan jumper perempuan-perempuan.
Setelah sambungan matriks, pelat depan dipasang menggunakan empat baut M2. Bungkus jumper di sekitar panel belakang dan depan, sehingga tidak ada kabel yang longgar.
Modul wajah kemudian dipasang di dalam kepala robot, seperti yang akan dijelaskan pada langkah selanjutnya.
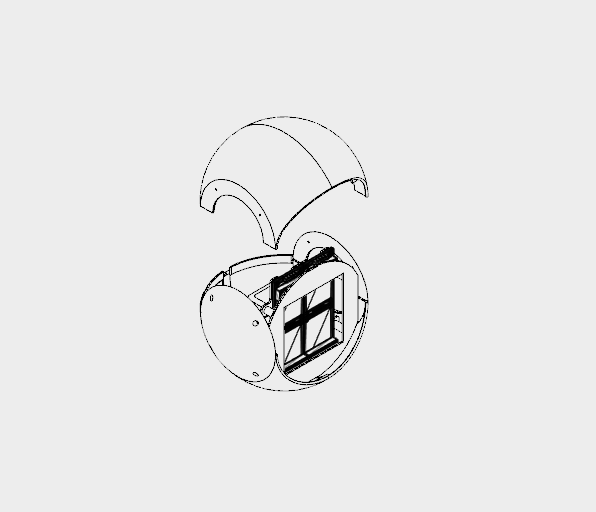
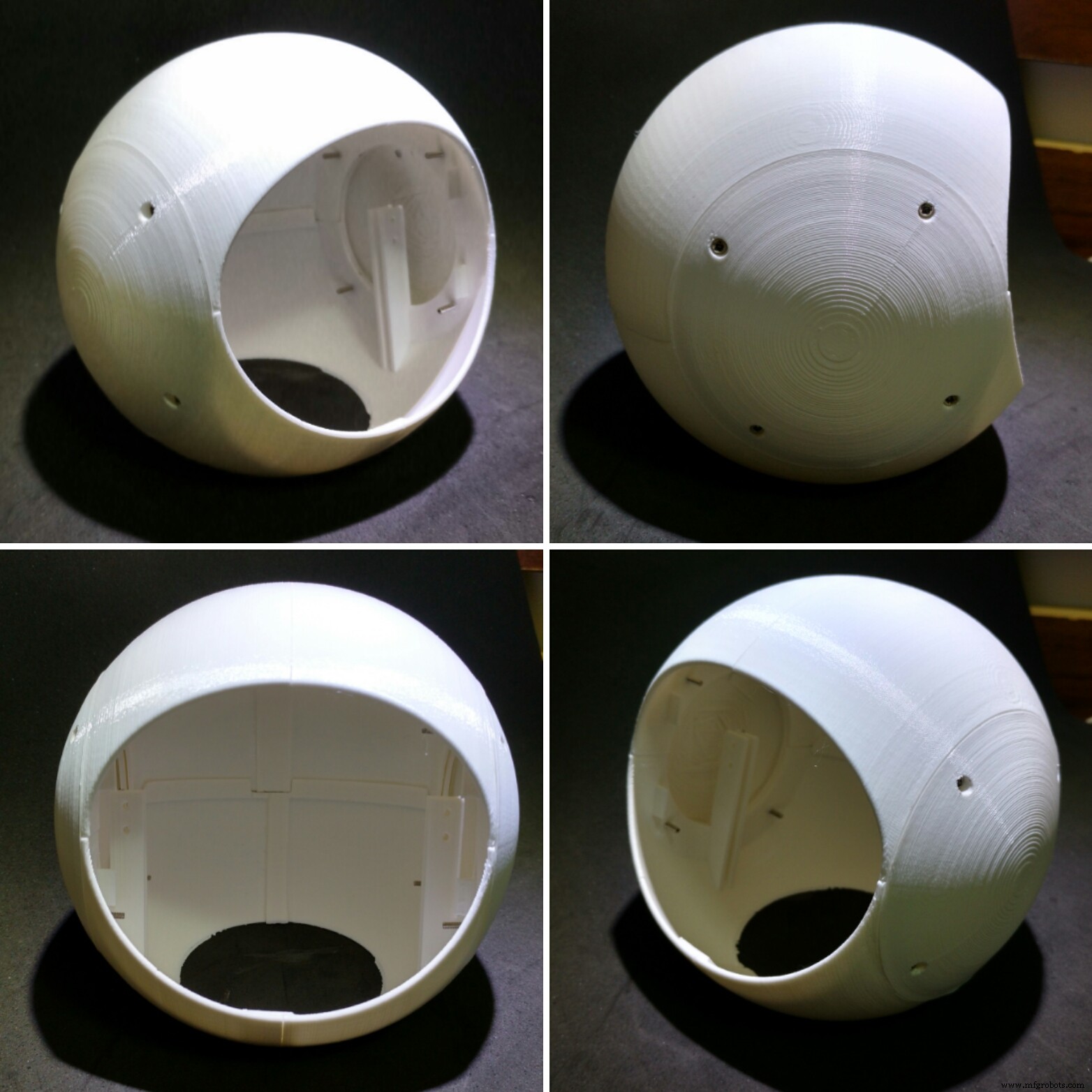
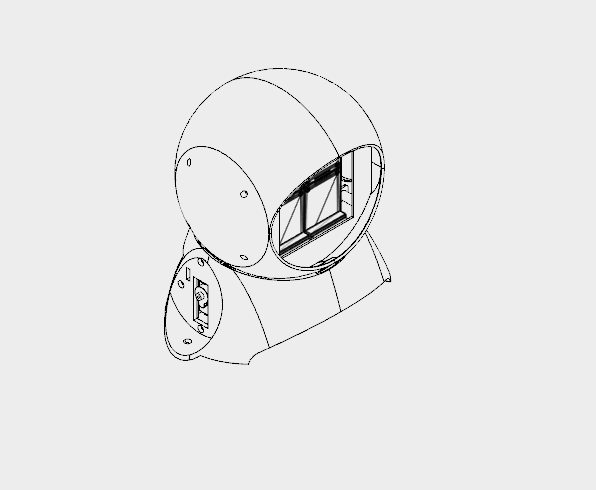
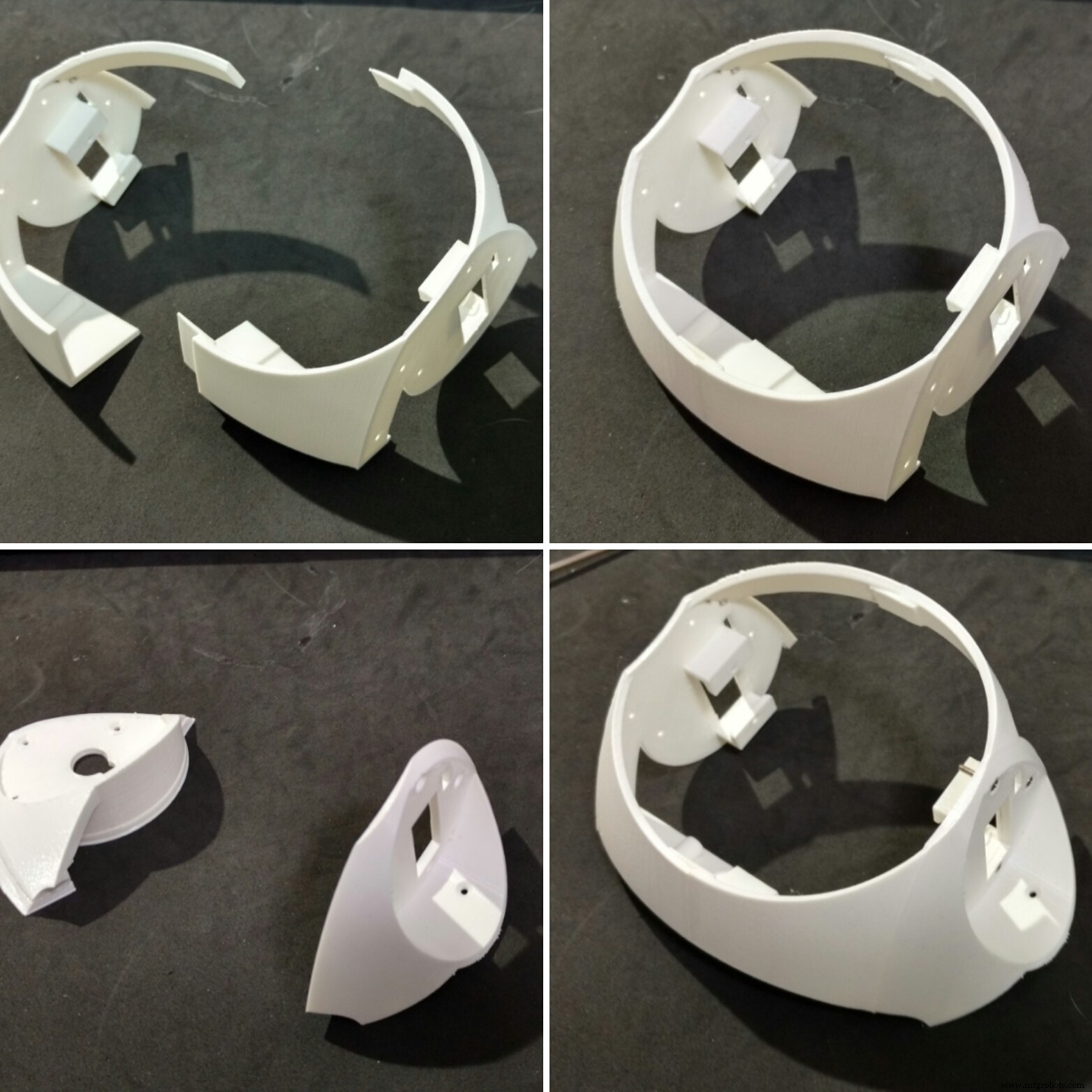
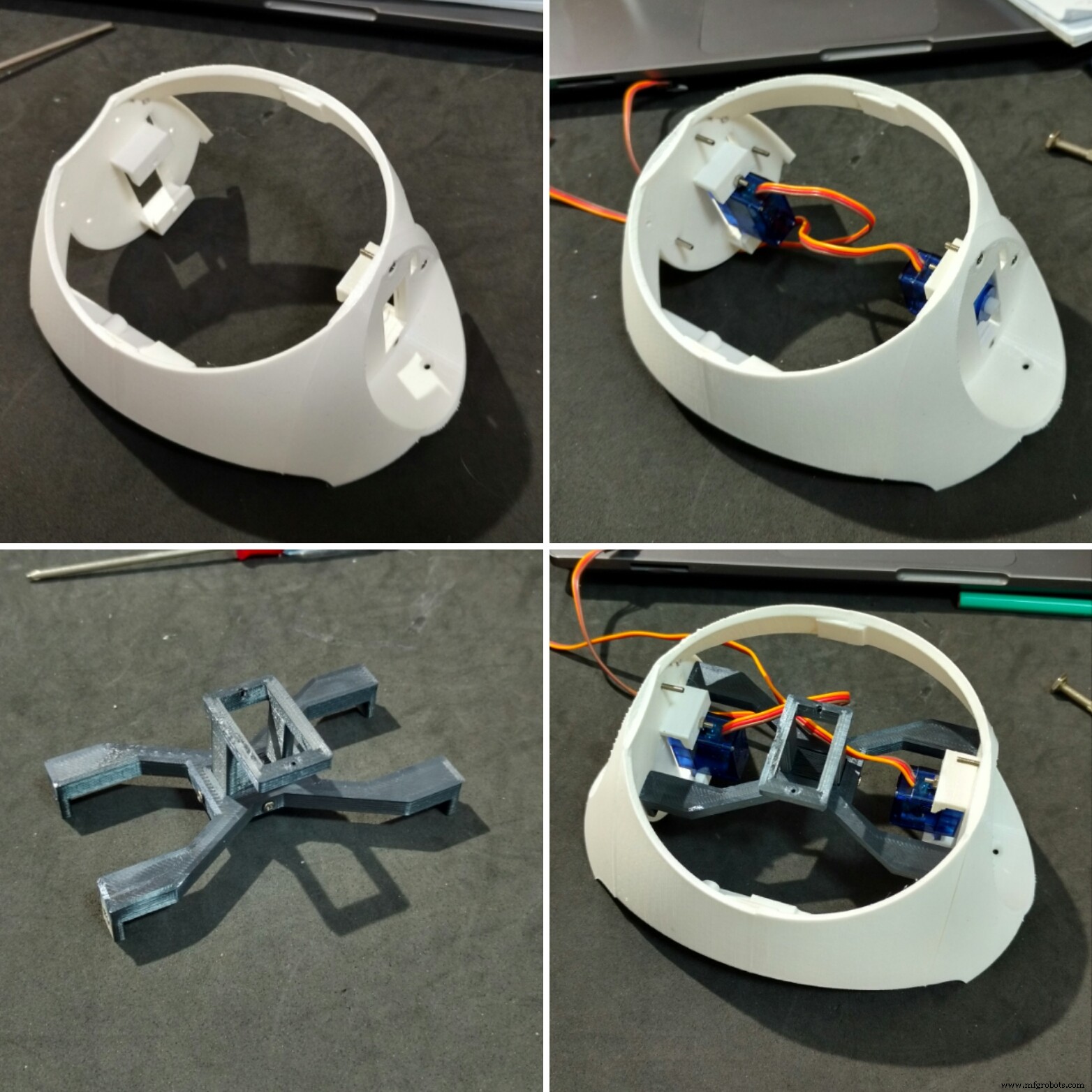
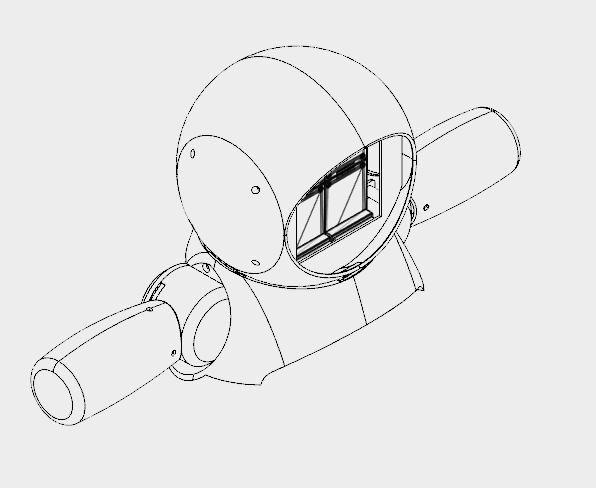
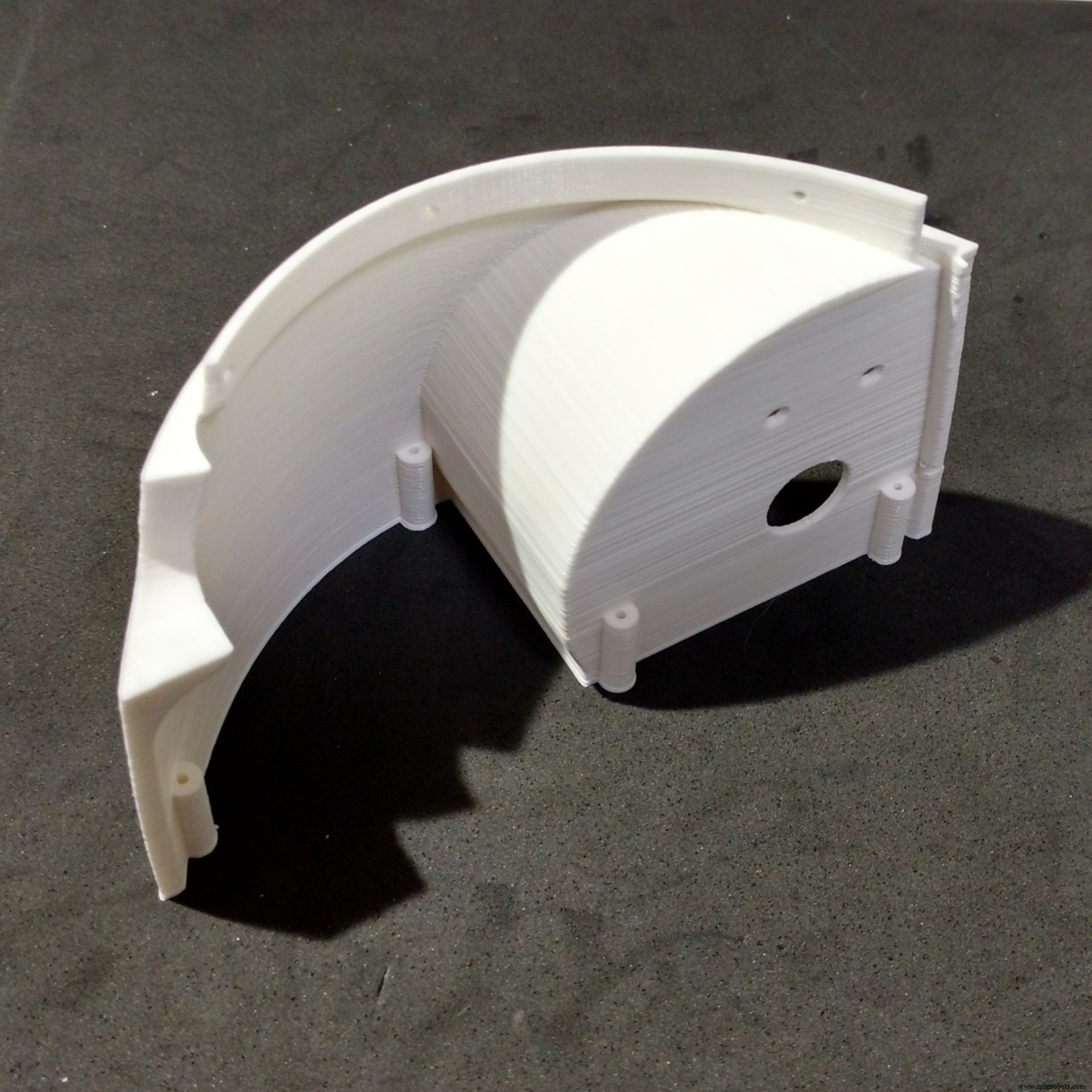
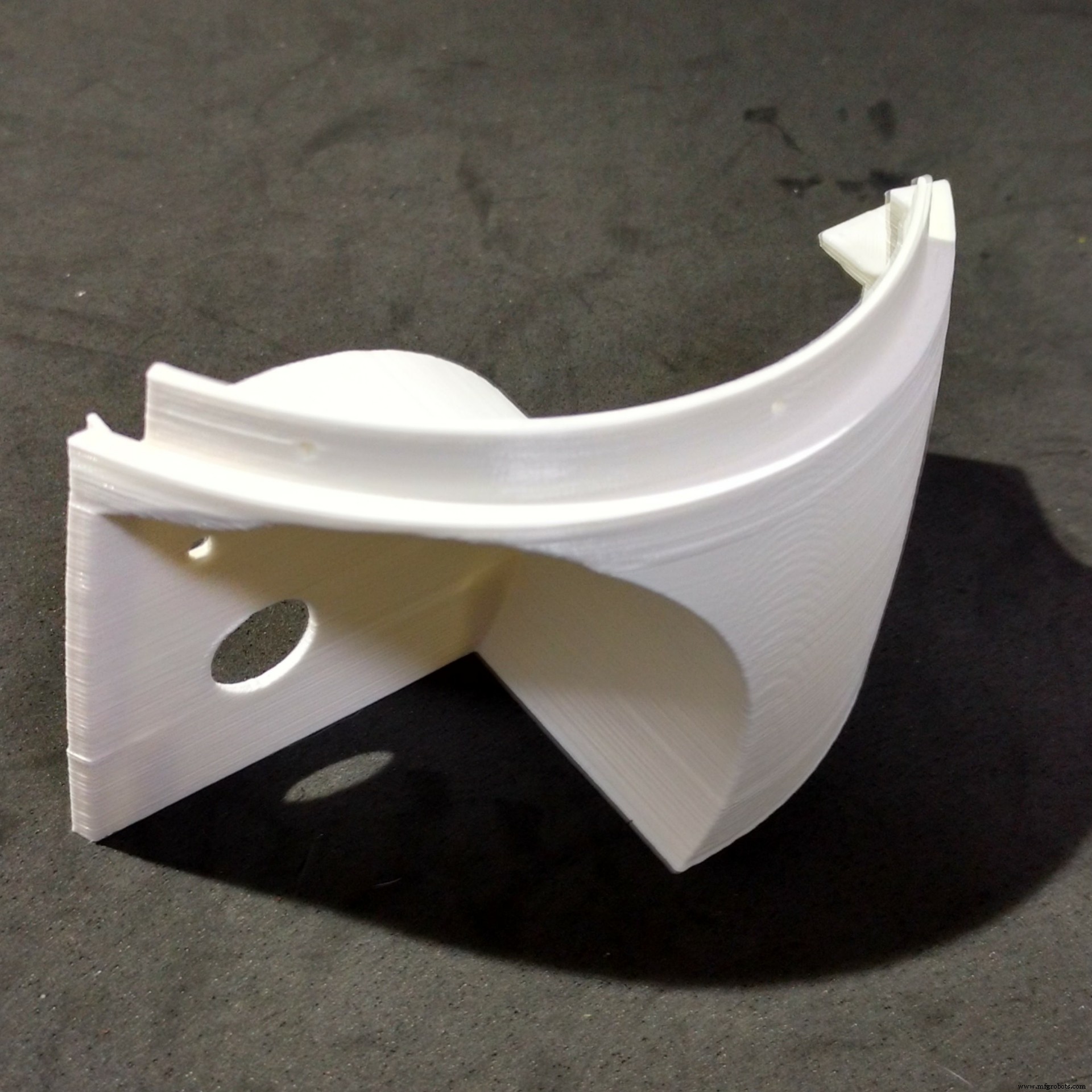
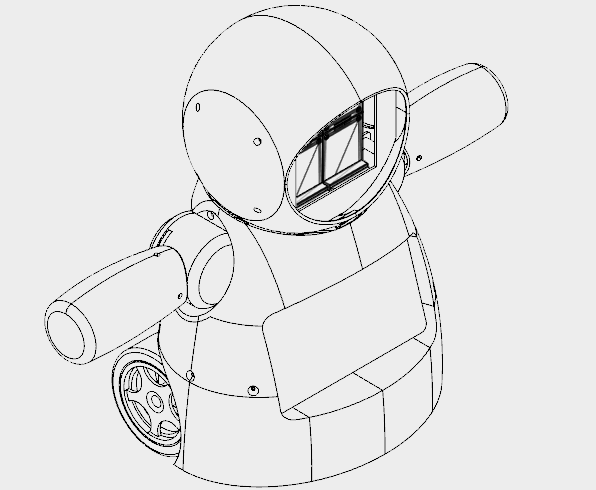
Langkah 6:Memasang Kepala
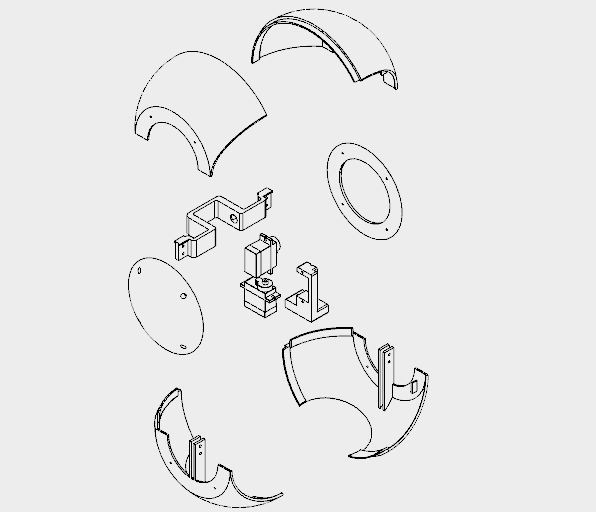
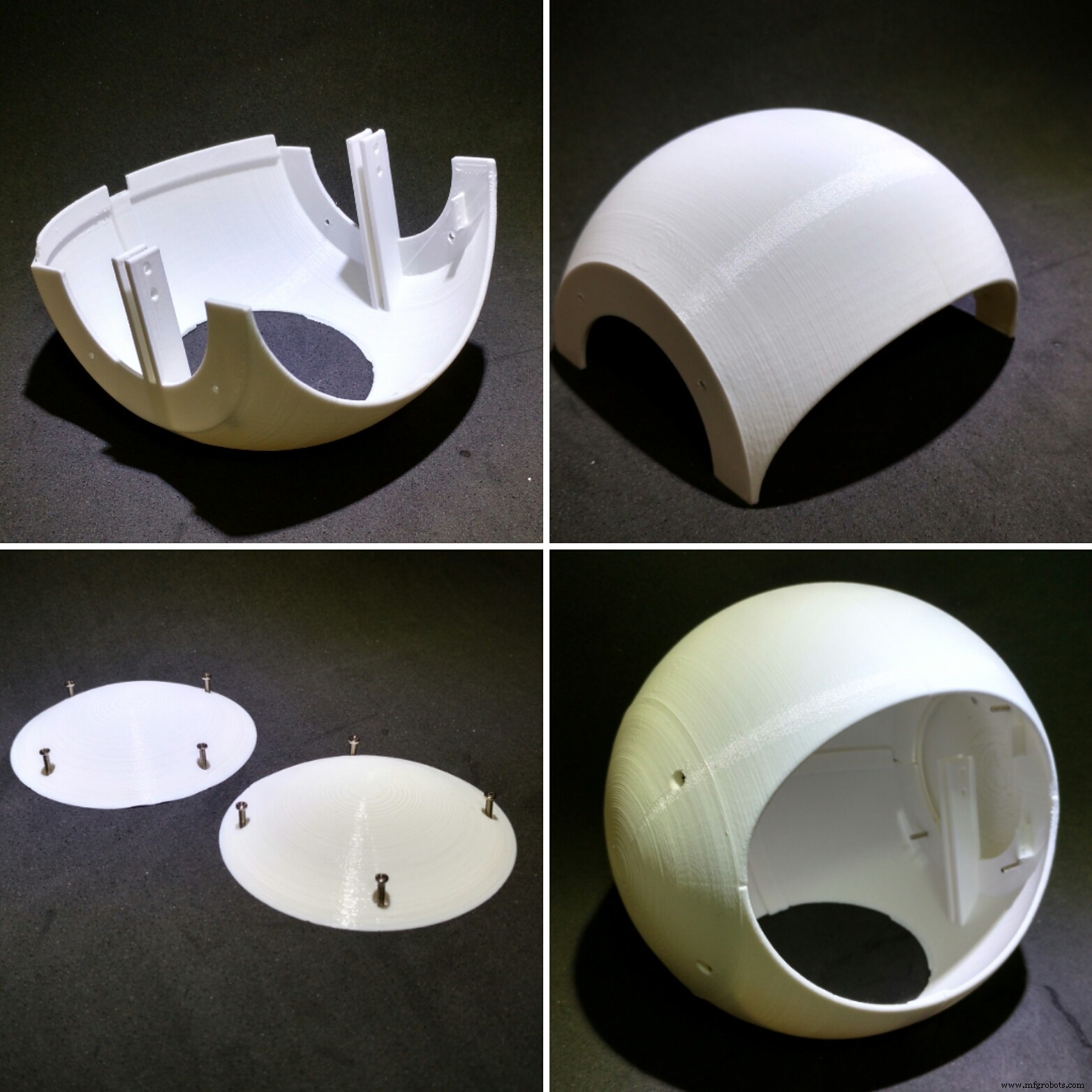

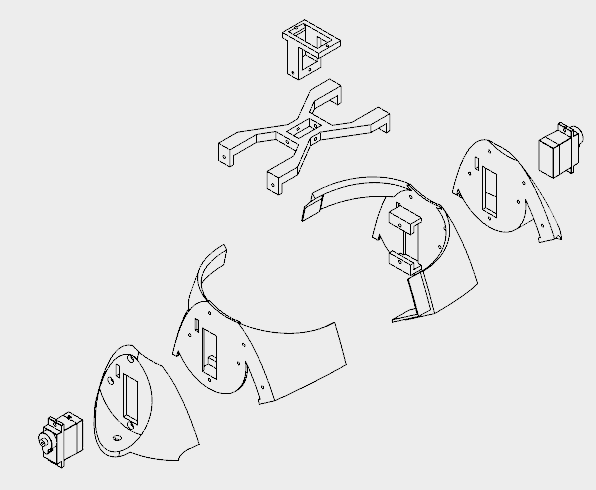
Kepala robot dibagi menjadi delapan bagian cetakan 3d, semuanya dicetak dalam PLA putih dengan resolusi 0,2mm, pengisi 10% dan tidak ada penyangga:
Saya membutuhkan waktu hampir 18 jam untuk mencetak struktur berdiameter 130 mm.
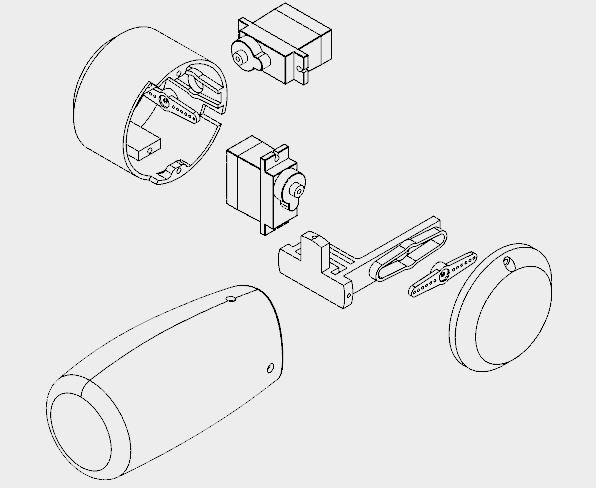
Bagian atas dan bawah kepala dibagi menjadi dua bagian. Mereka direkatkan menggunakan lem super. Oleskan lem dan diamkan selama beberapa jam.
Tutup samping kemudian dipasang menggunakan baut yang dipasang di sisi atas dan bawah kepala. Dengan cara ini, kepala dapat dibongkar untuk diperbaiki dengan melepas sekrup yang terpasang pada bagian atas kepala. Sebelum menutup kepala, rakit wajah robot (dijelaskan di langkah sebelumnya), dan bagian dada (dijelaskan di langkah berikutnya).
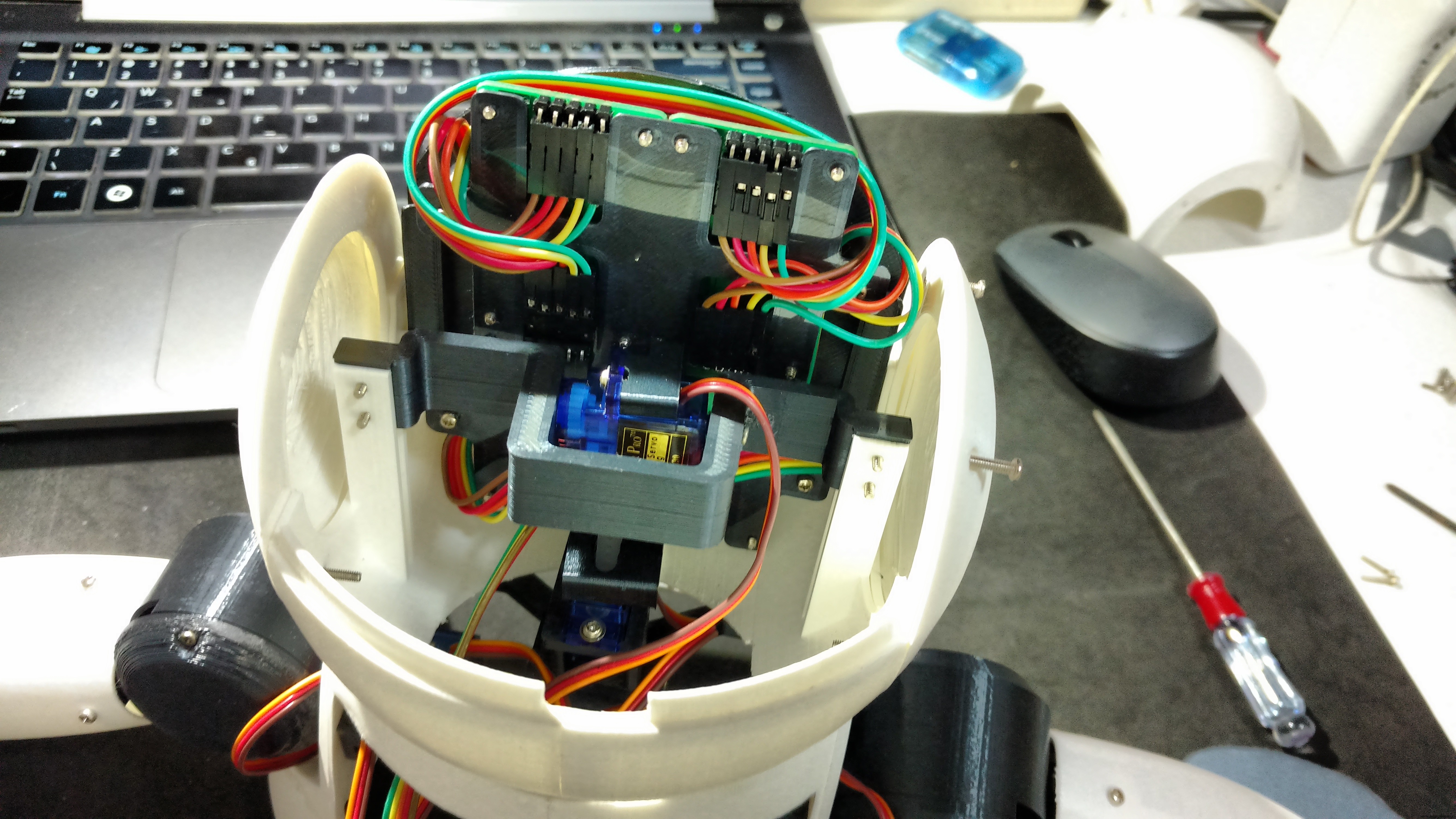
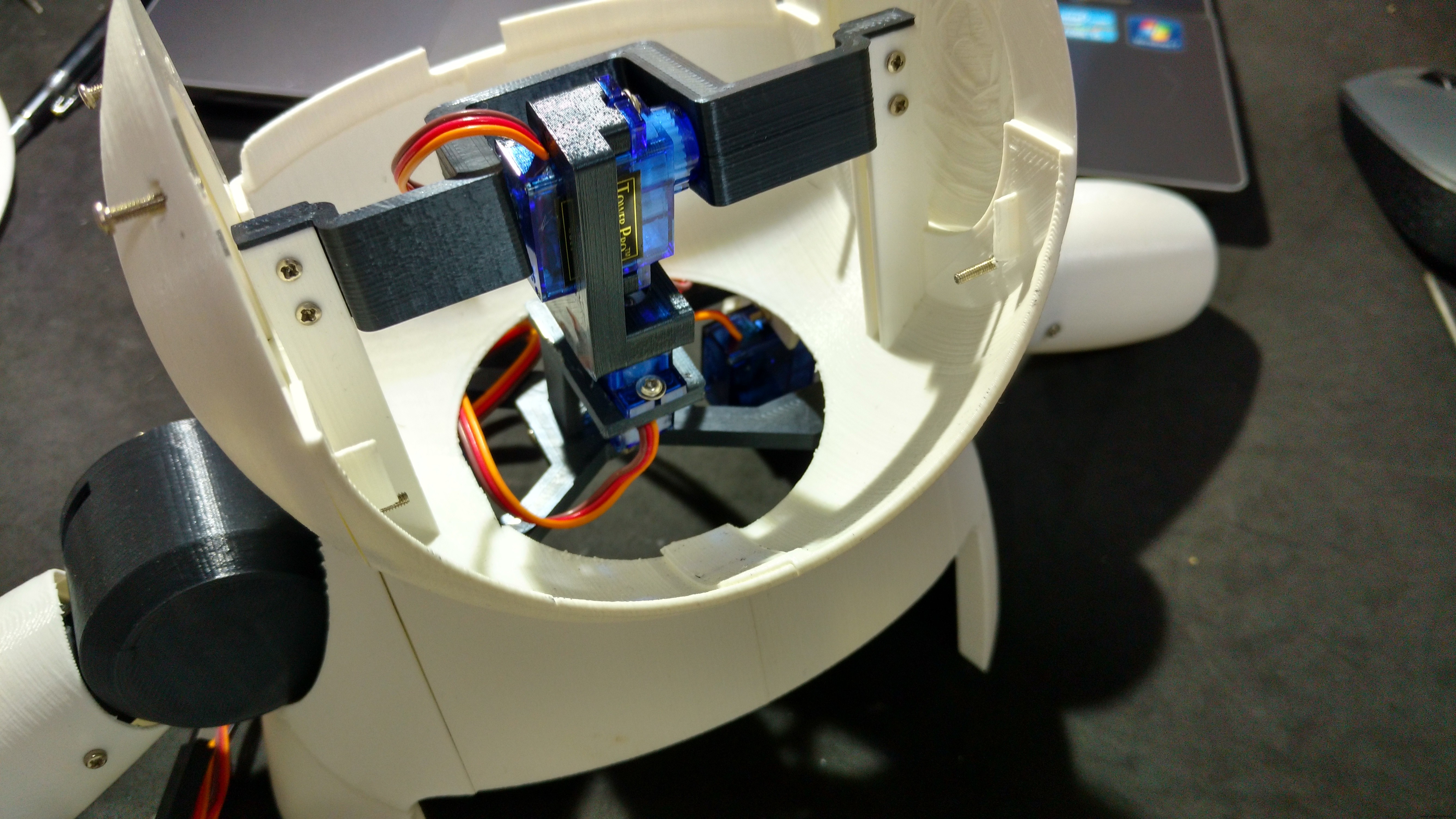
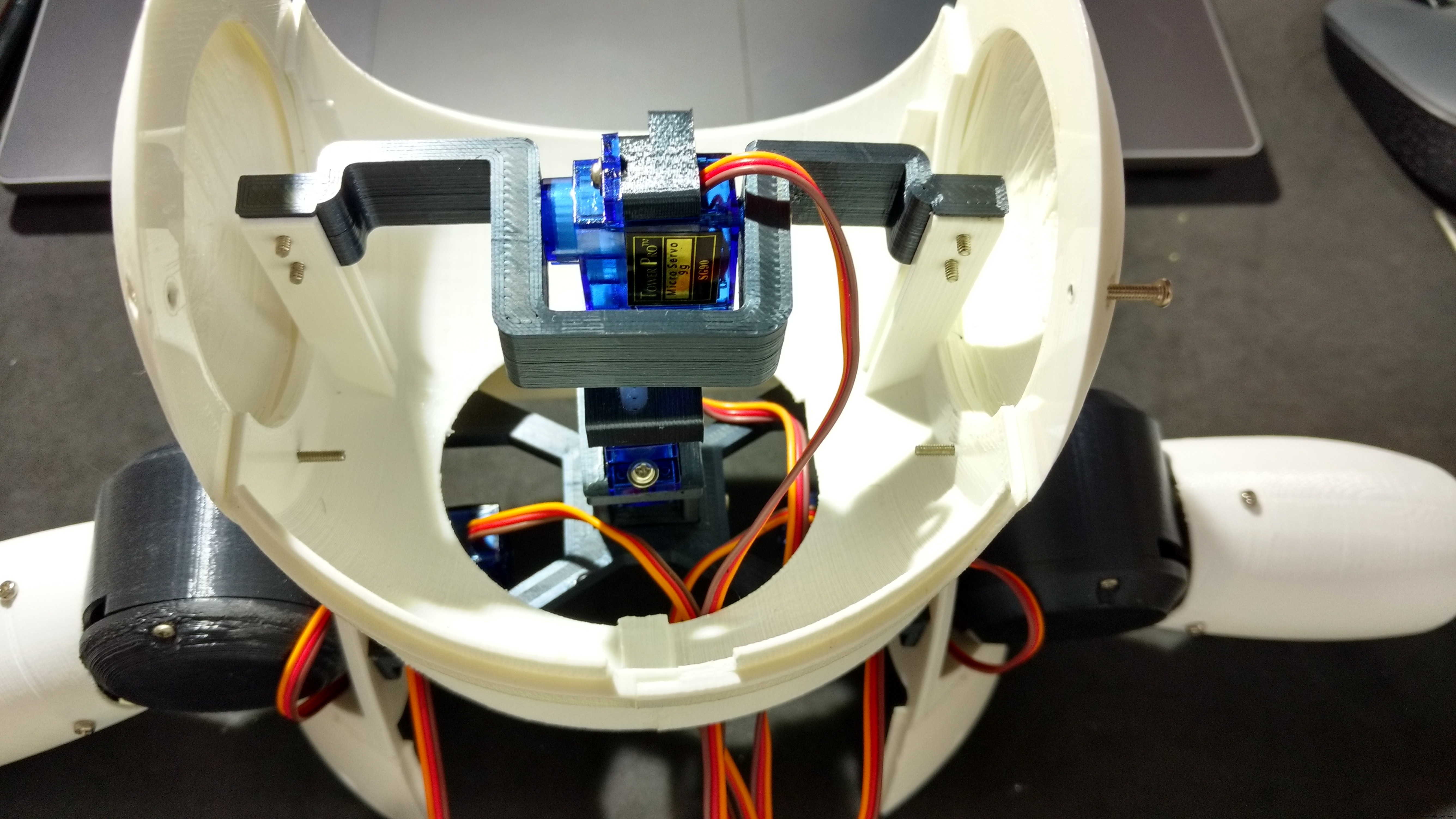
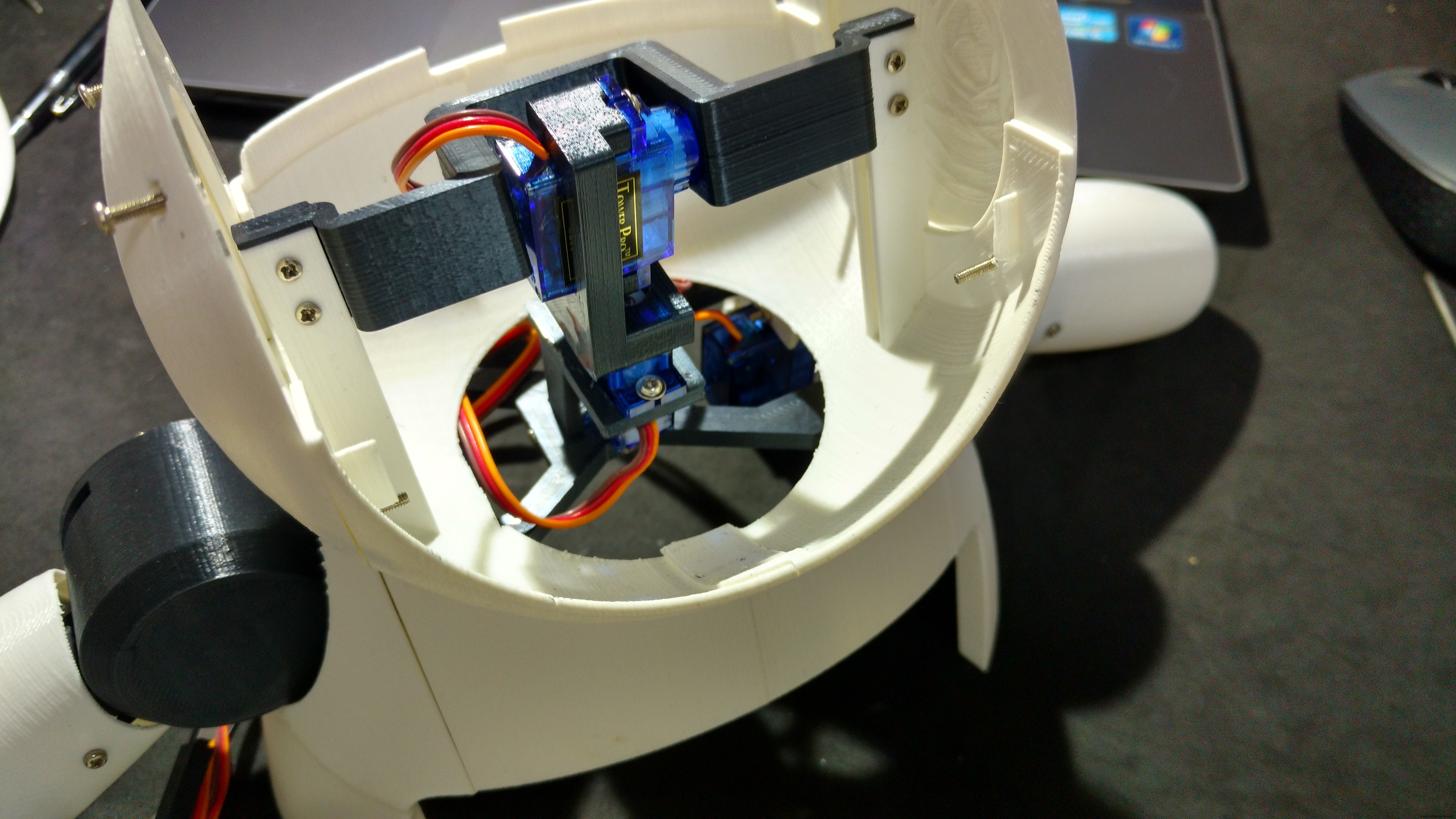
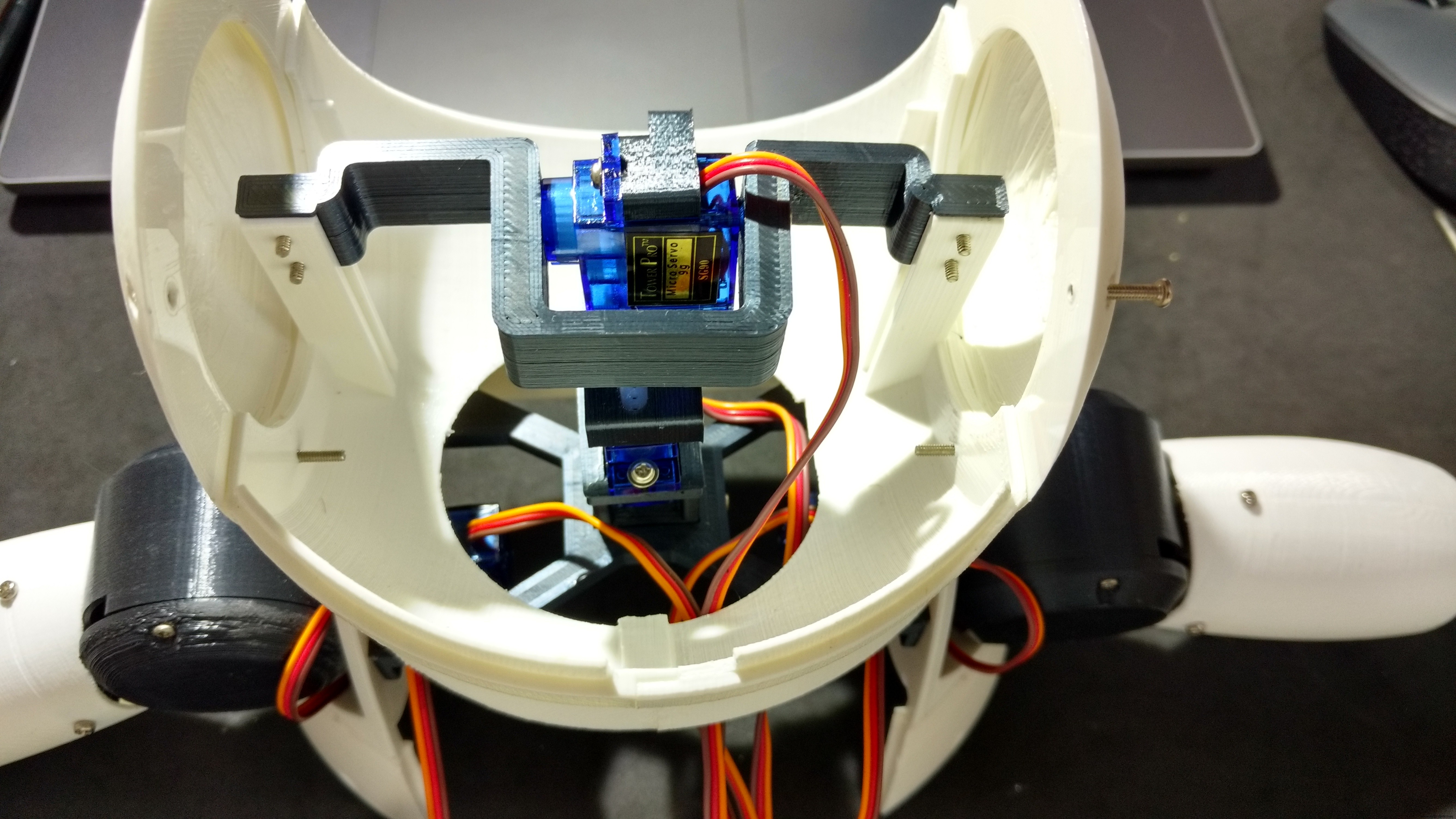
Servomotor #5 dipasang pada sumbu Leher 1. Saya menempatkan servo di tengah sumbu, kemudian memasang klakson dan menggunakan sekrup untuk mengunci posisinya. Saya menggunakan dua baut M2x6mm untuk memasang sumbu leher 2 pada motor servo itu. Servomotor #6 terpasang ke sumbu Leher 2 dengan cara yang sama.
Sumbu leher 2 kemudian dihubungkan ke pusat Leher, seperti yang ditunjukkan pada langkah berikutnya.
Modul wajah dipasang di dalam kepala.
Langkah 7:Memasang Ledakan dan Bahu
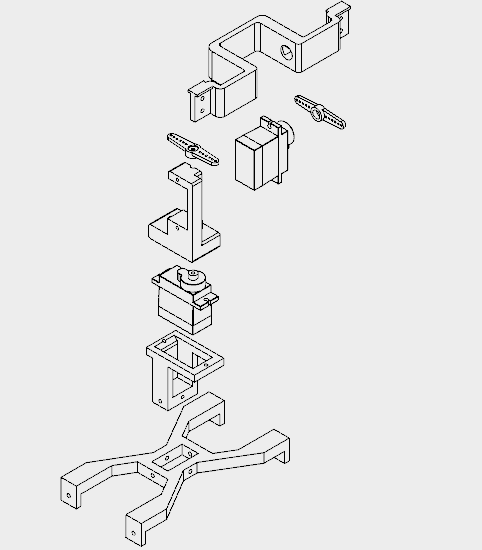
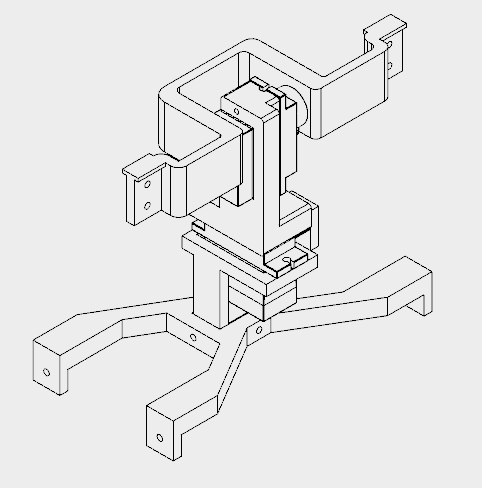
Payudara dan bahu membutuhkan waktu sekitar 12 jam untuk dicetak.
Bagian ini terdiri dari lima bagian yang berbeda:
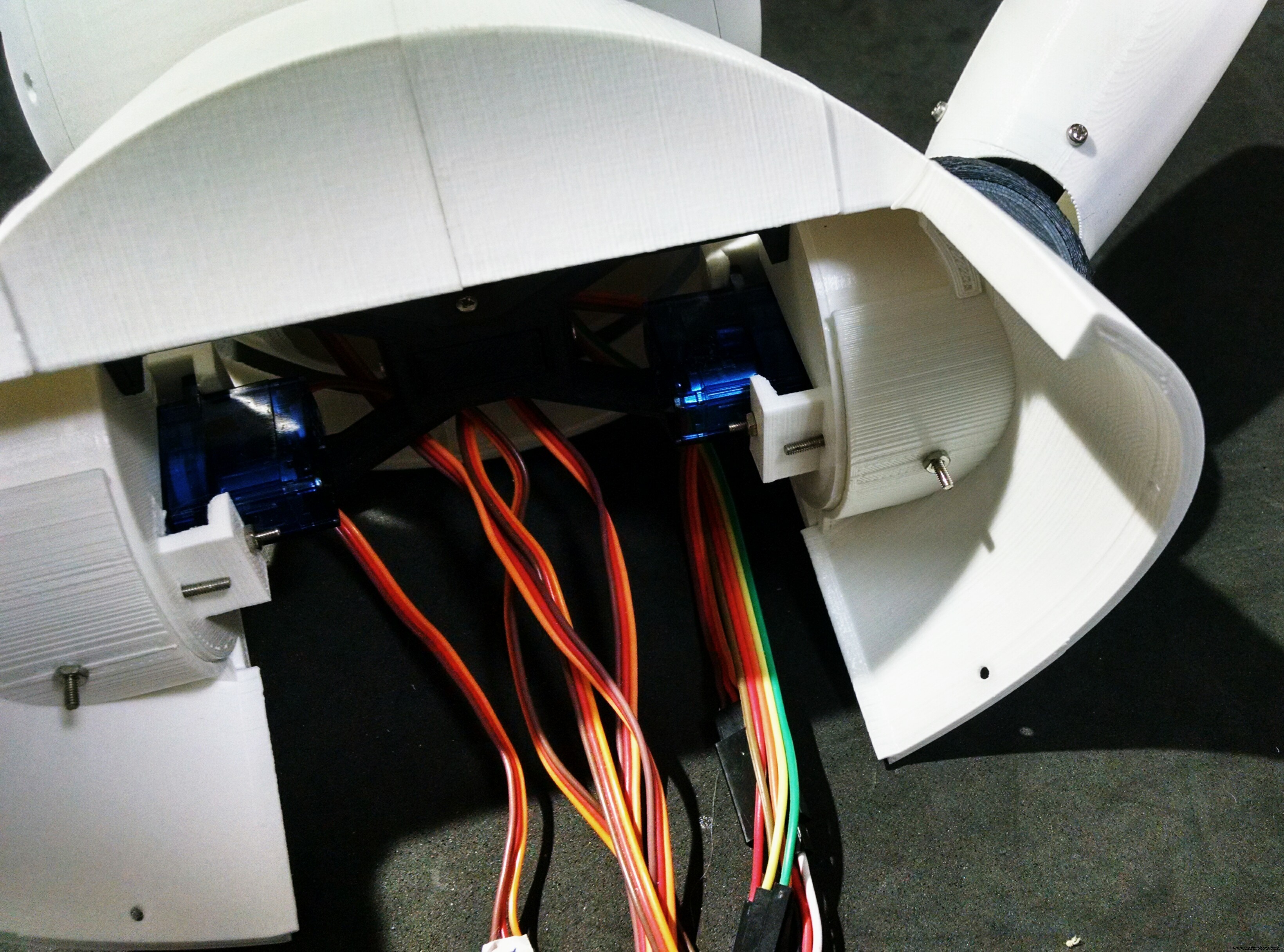
Bagian payudara direkatkan menggunakan lem super. Bahu dipasang di samping menggunakan baut M2x10mm, dan servomotor (Servomotor #2 dan #4) dipasang di setiap sisi. Mereka melewati lubang persegi panjang di setiap bahu (kawat sebenarnya cukup sulit untuk dilewati), dan dipasang menggunakan baut dan mur M2x10mm.
Leher tengah memiliki lubang persegi panjang, di mana bagian sumbu Leher 3 dimasukkan. Empat baut M2x6mm digunakan untuk menghubungkan kedua bagian tersebut. Setelah itu leher bagian tengah dilekatkan pada bahu. Ini menggunakan baut yang sama yang digunakan untuk memasang bahu di payudara. Empat mur M2x1,5mm digunakan untuk mengunci posisinya.
Servomotor #6 dihubungkan ke sumbu Leher 3 menggunakan dua sekrup. Kemudian saya memasang sumbu leher 3 di dalam lubang persegi panjang tengah leher, dan menggunakan empat baut M2x6mm untuk mengunci posisinya.
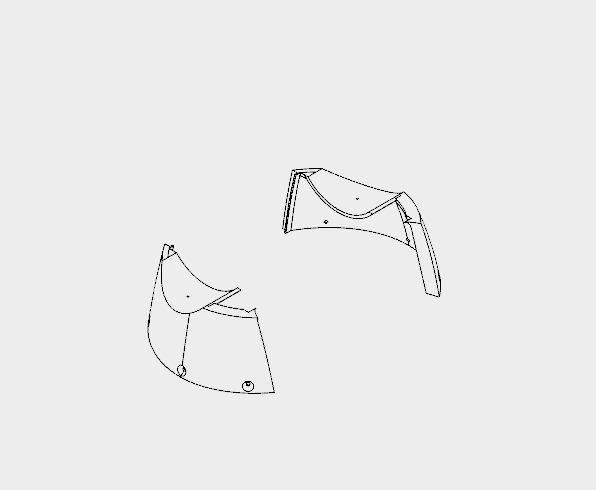
Langkah 8:Merakit Senjata


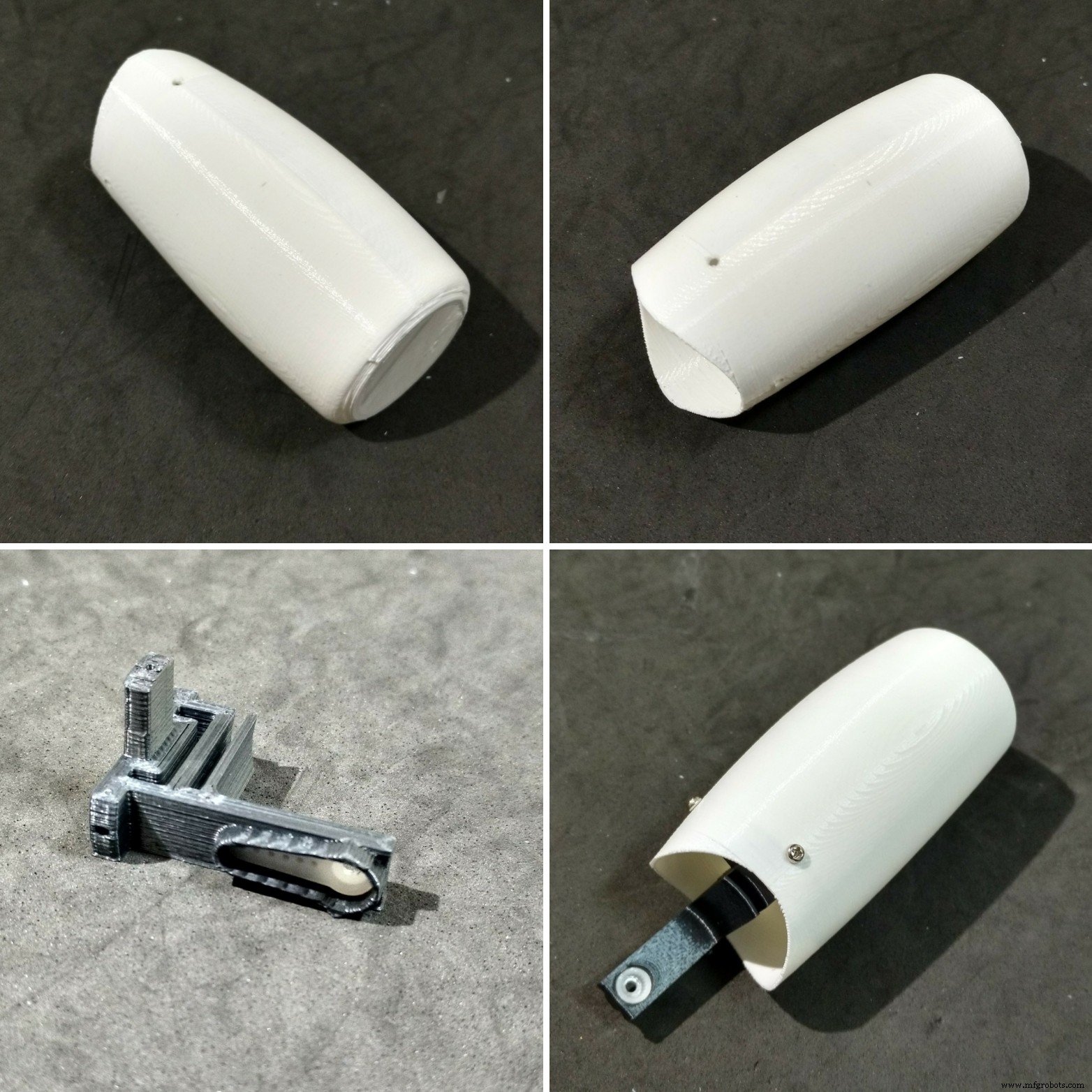

Saya membutuhkan waktu sekitar 5 jam untuk mencetak setiap lengan.
Setiap lengan terbuat dari empat bagian:
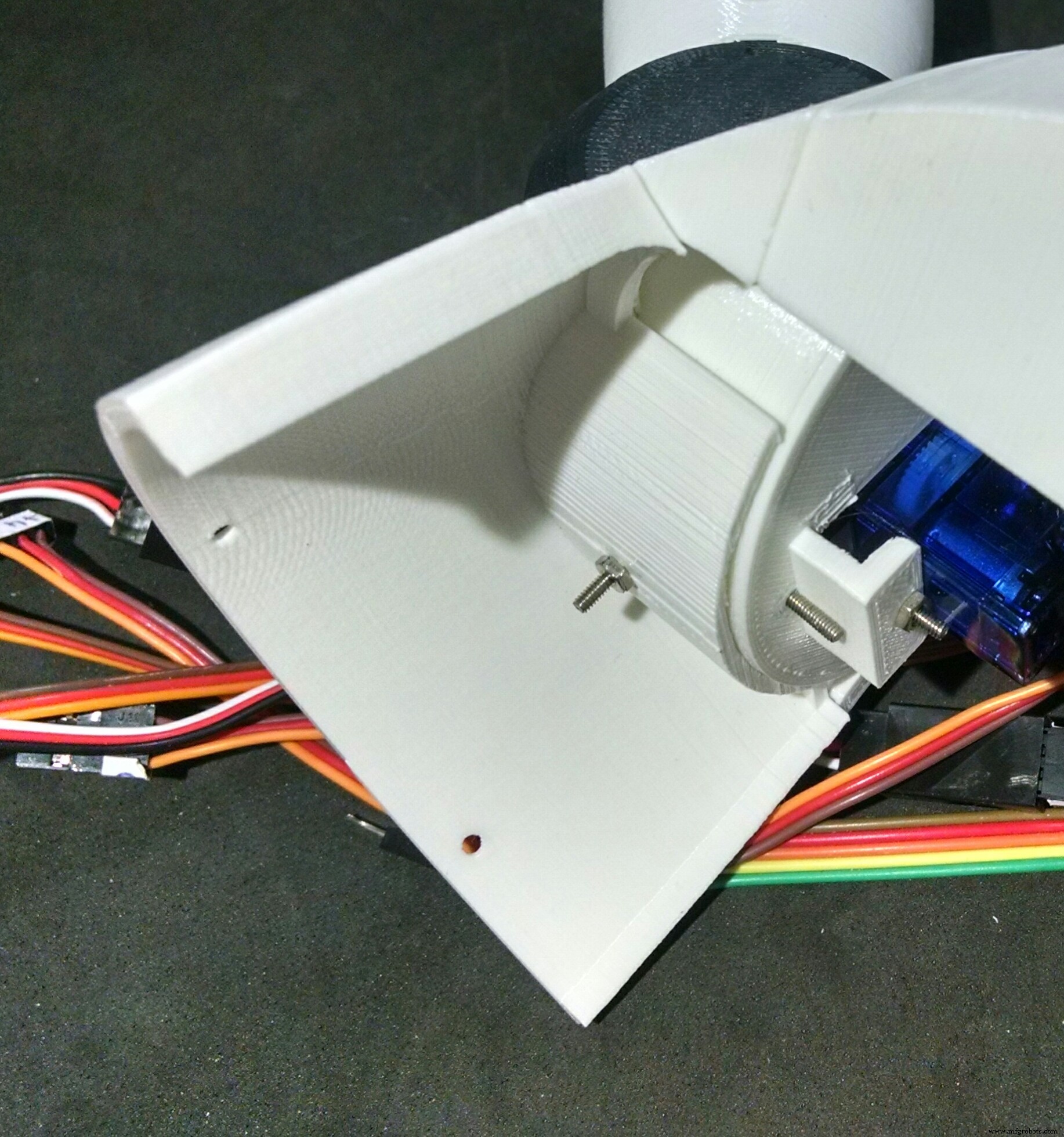
Sumbu lengan dipusatkan dan dipasang pada lengan itu sendiri menggunakan tiga baut M2x6mm. Tanduk servo dipasang di ujung sumbu lainnya.
Sebuah servomotor (#1 dan #3) dipasang di dalam cangkir Bahu menggunakan beberapa sekrup, dan kemudian dipasang tanduknya (yang terpasang pada sumbu lengan). Terdapat lubang pada cup untuk pemasangan klakson lainnya, yang terpasang pada servo (#2 dan #4) yang sudah terpasang di bahu, seperti yang ditunjukkan pada langkah sebelumnya.
Ada lubang lain di Cangkir (dan di Bahu) untuk melewatkan kabel servo. Setelah itu, Cap dipasang untuk menutup bahu robot, dengan dua baut M2x6mm.
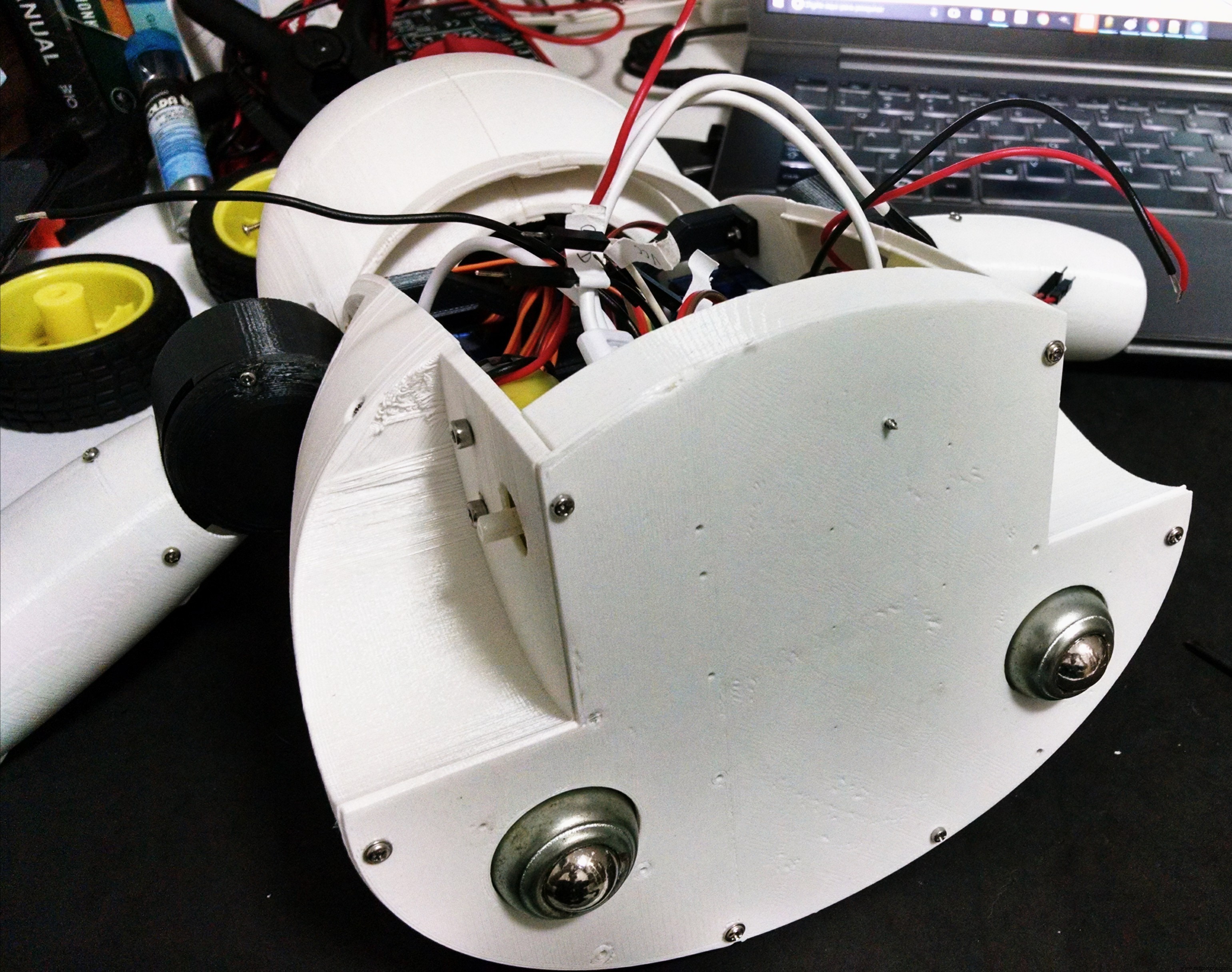
Langkah 9:Memasang Peti
The chest is the part that links the bust to the bottom (wheels and base) of the robot. It's made of only two parts (right and left parts. I printed them in 4 hours.
The shoulders of the robot fits on upper part of the chest. There is a hole for a bolt that helps the alignment and fixation of thos parts. Although it's recomended to glue those two parts.
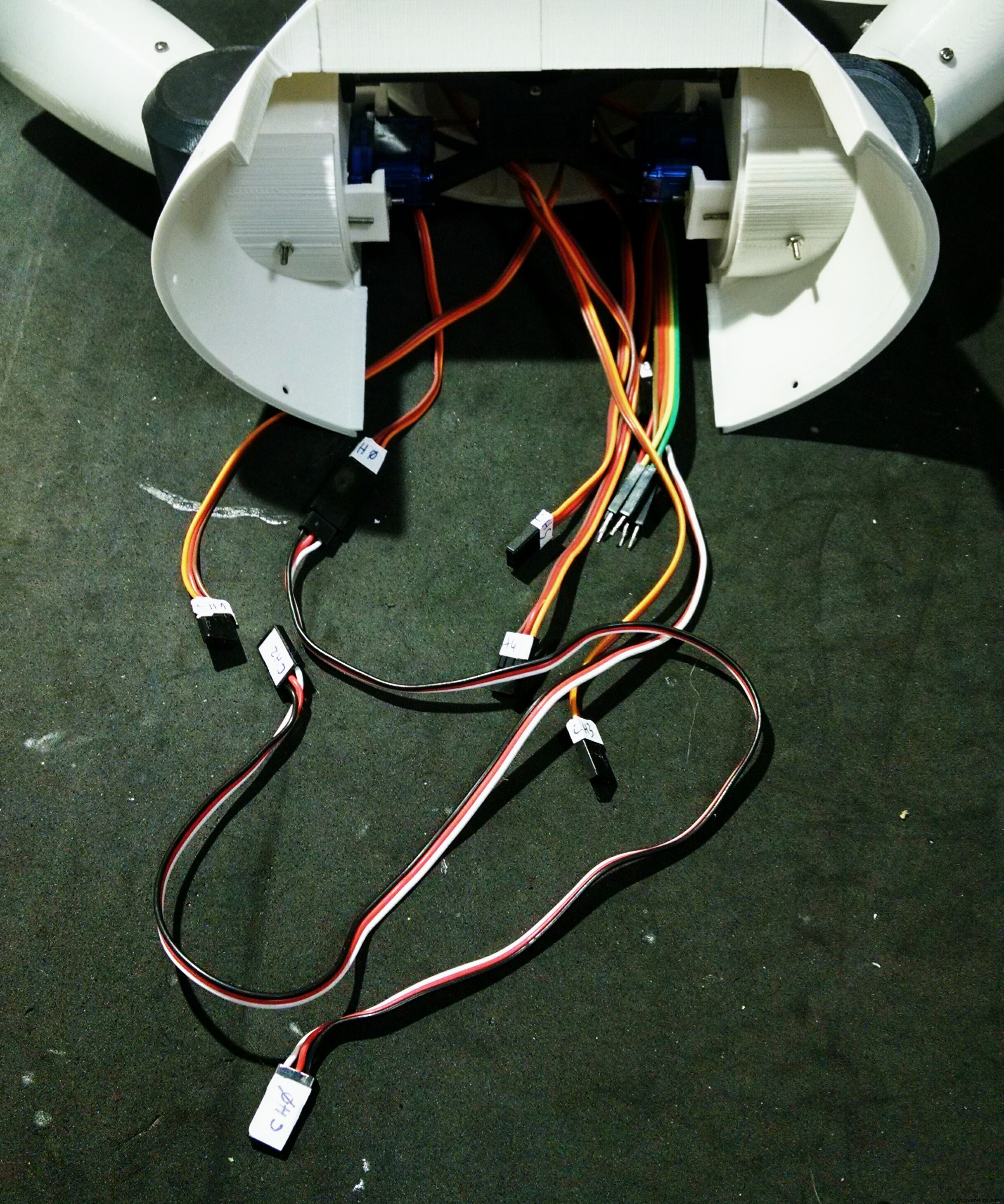
The bottom of this parts have six holes, which are used for the connection to the wheels, as it will be shown later.
At this point I labelled the servomotors with some stickers, in order to make the connection of the circuits easier.
Step 10:Assembling the Wheels
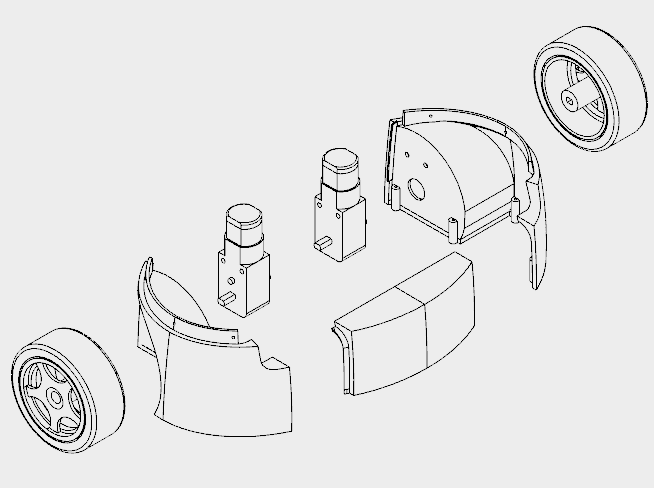
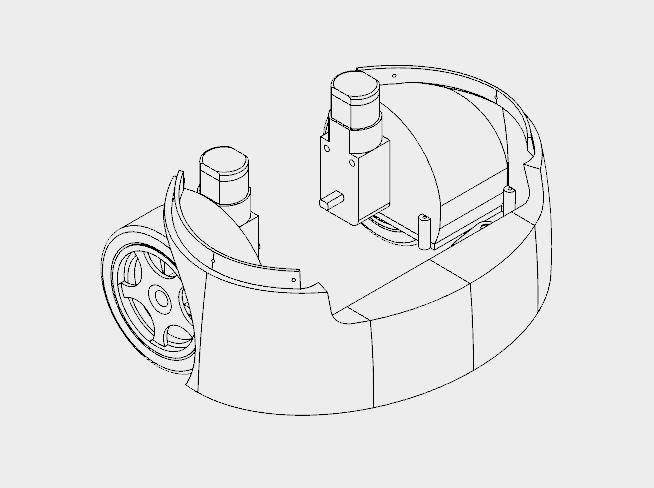
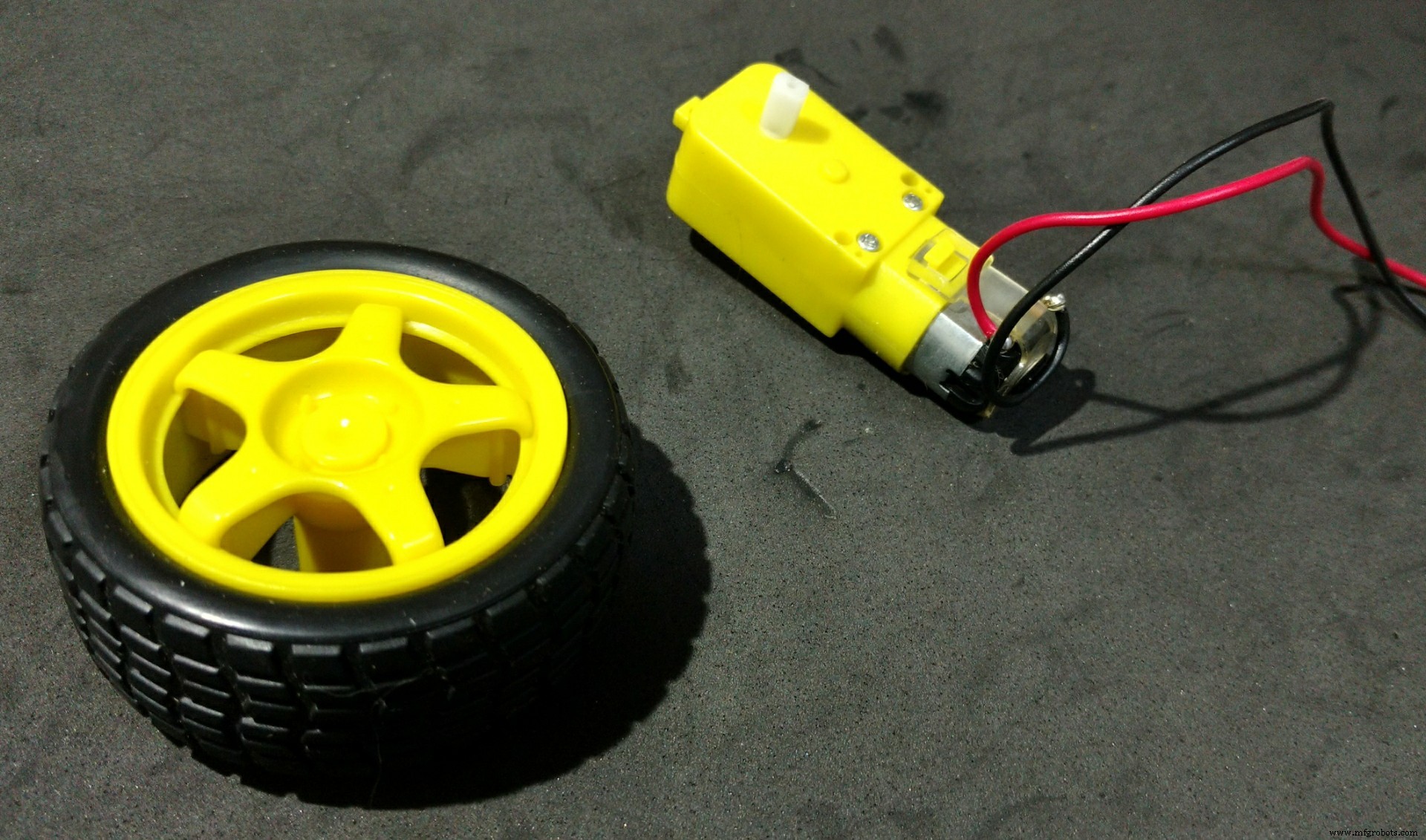
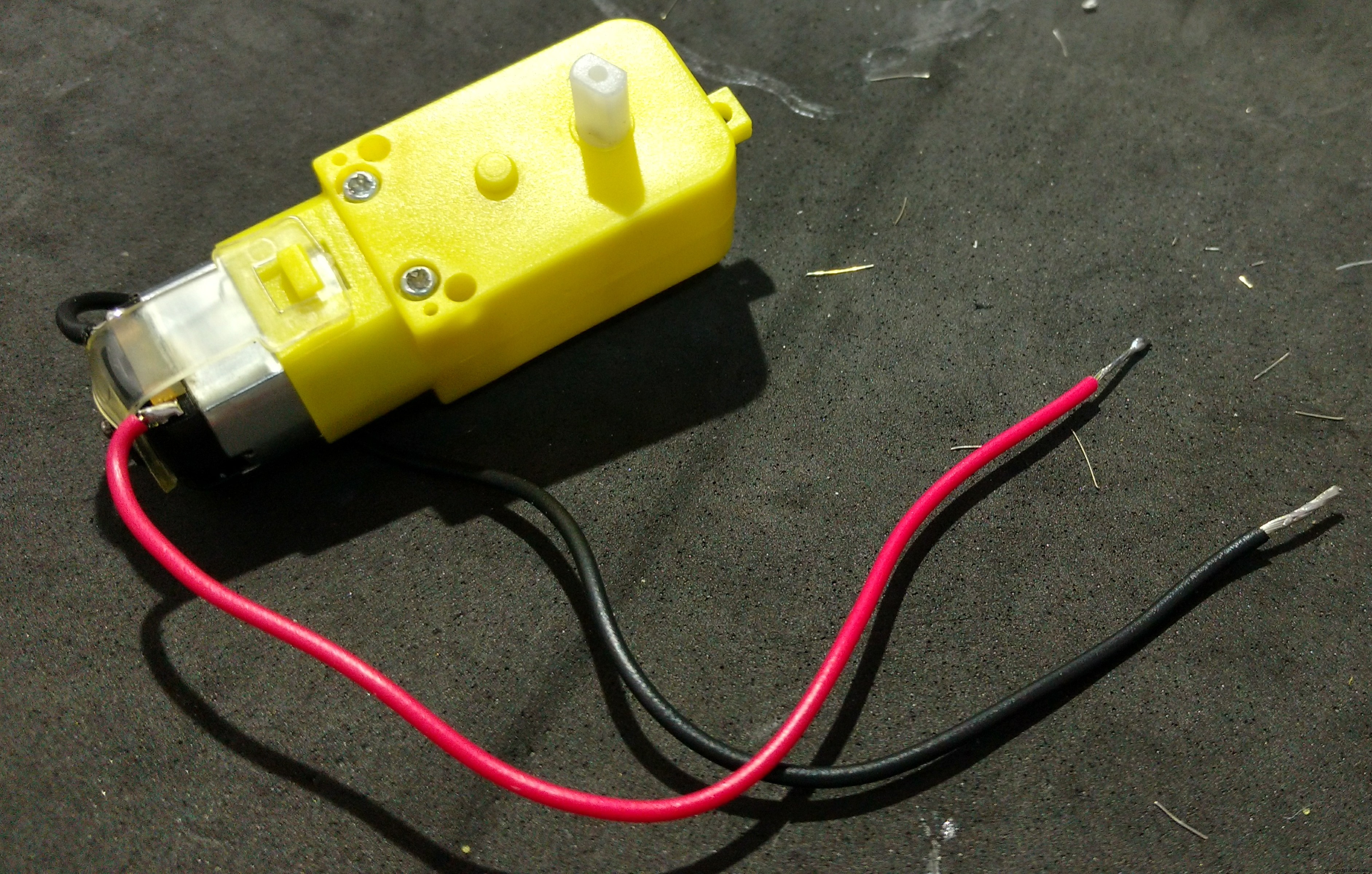

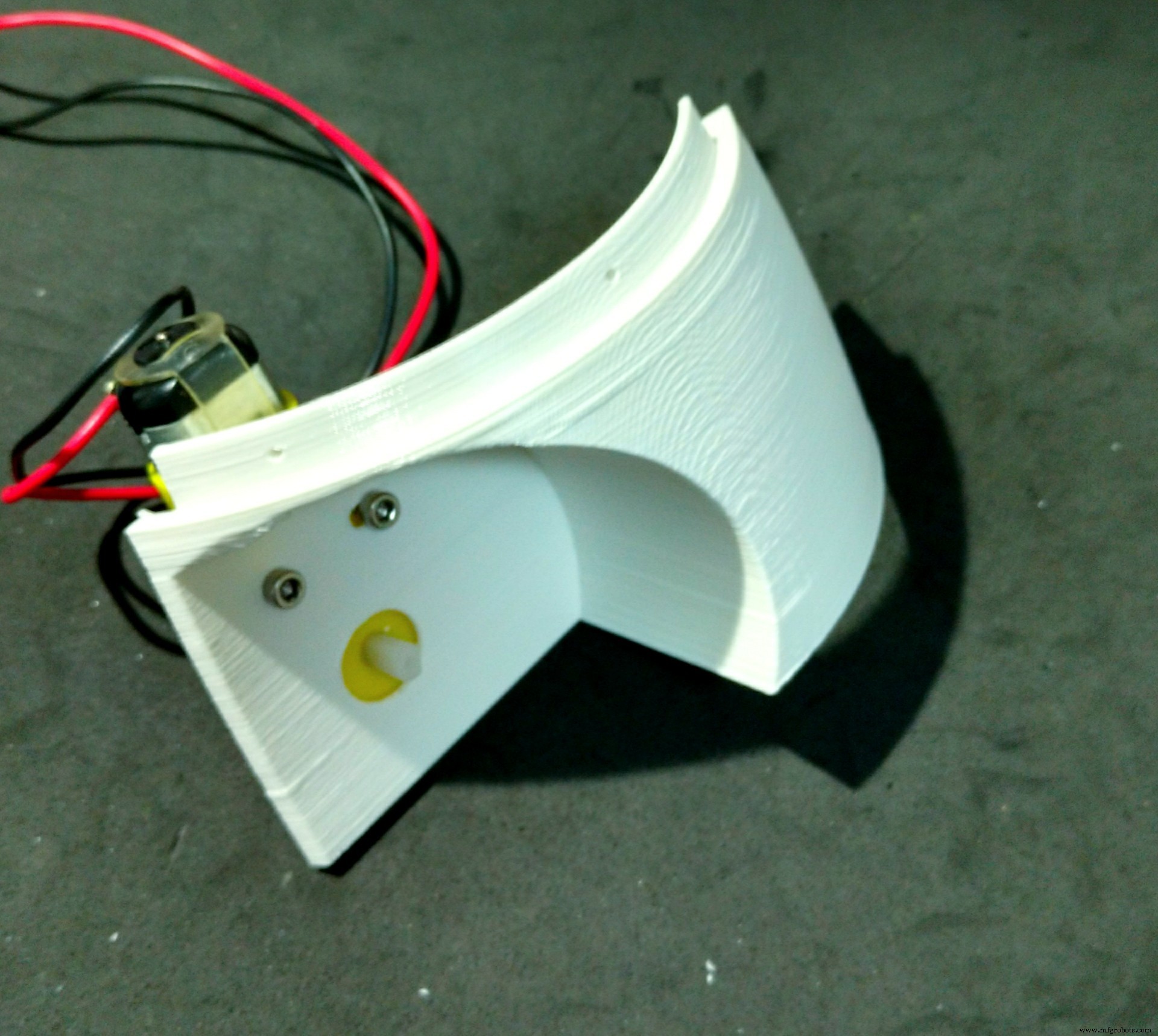
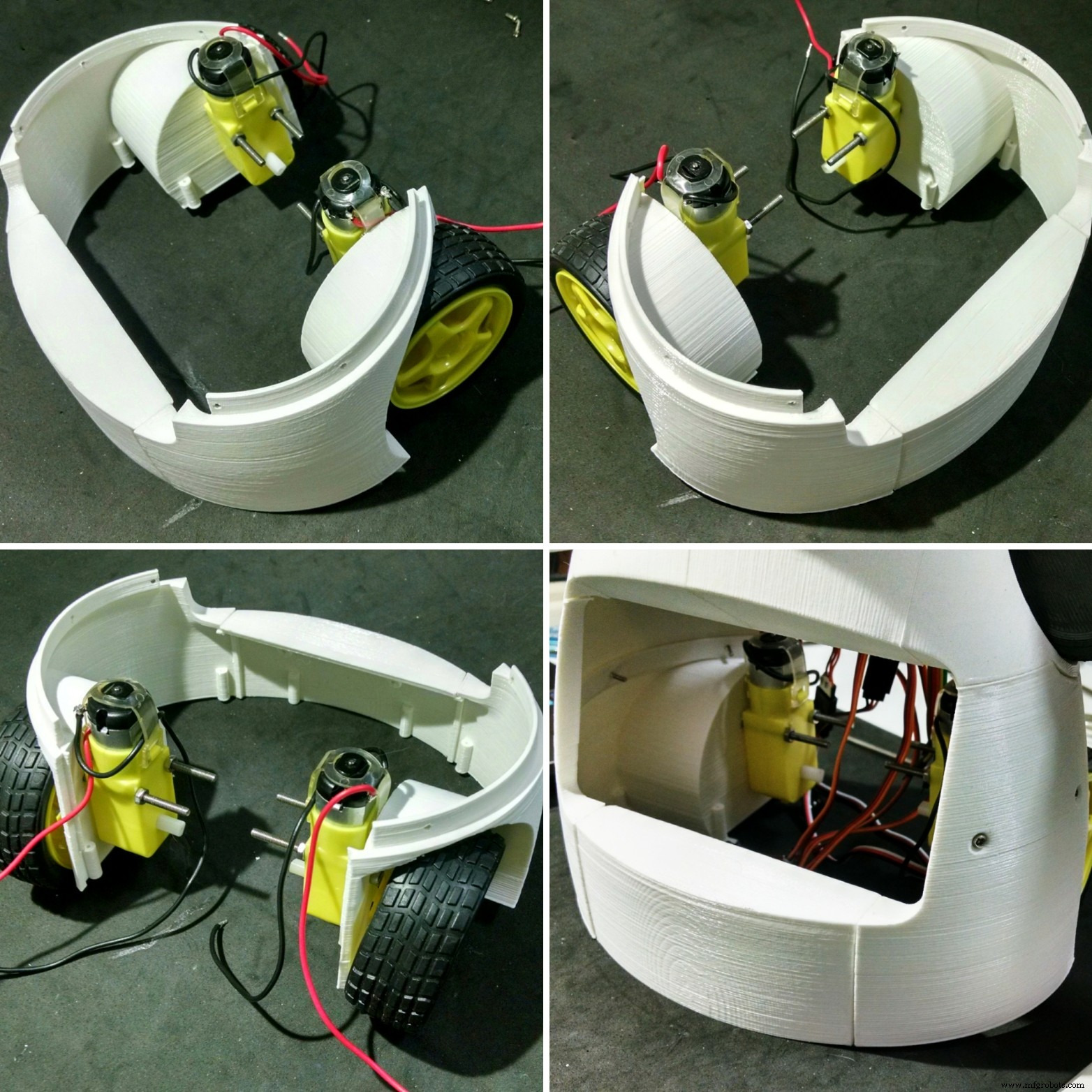
The wheels of the robot uses three 3d printed parts:
It took me around 10h to print those parts.
I followed the following steps for assembling the wheels:
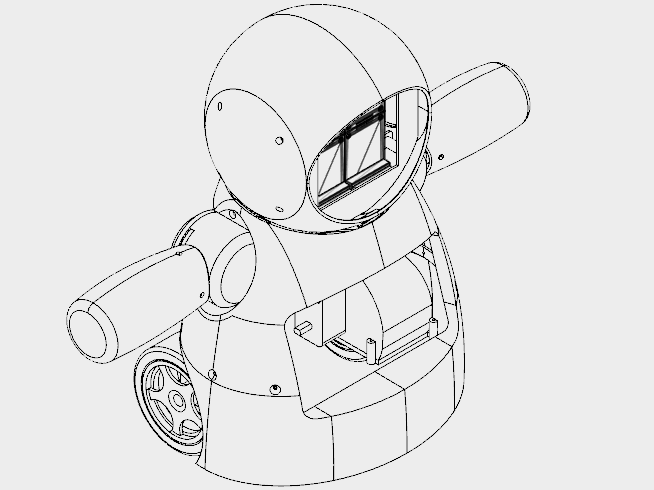
Step 11:Phone Holder
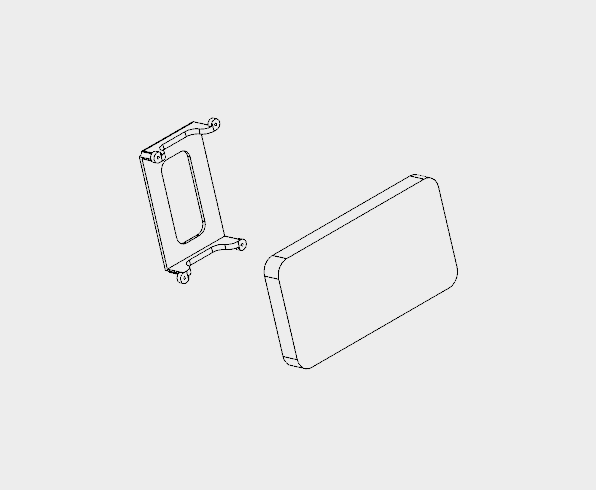

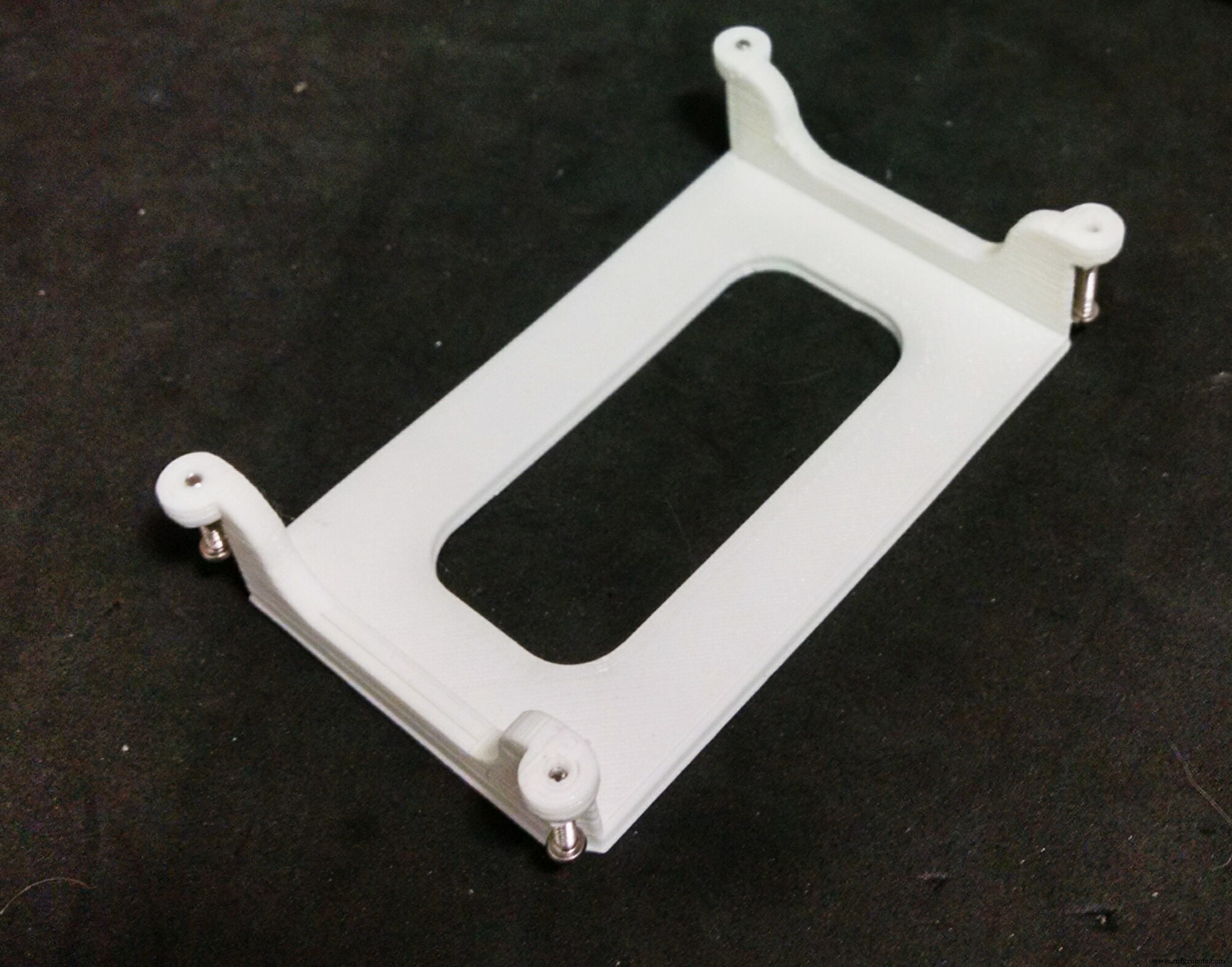

The phone holder is a single 3d printed part, and it takes around 1 hour to print.
The robot has a smartphone at it's belly. It was designed for a Motorola Moto E. It has a 4.3" display. Other smartphones with similar size might fit as well.
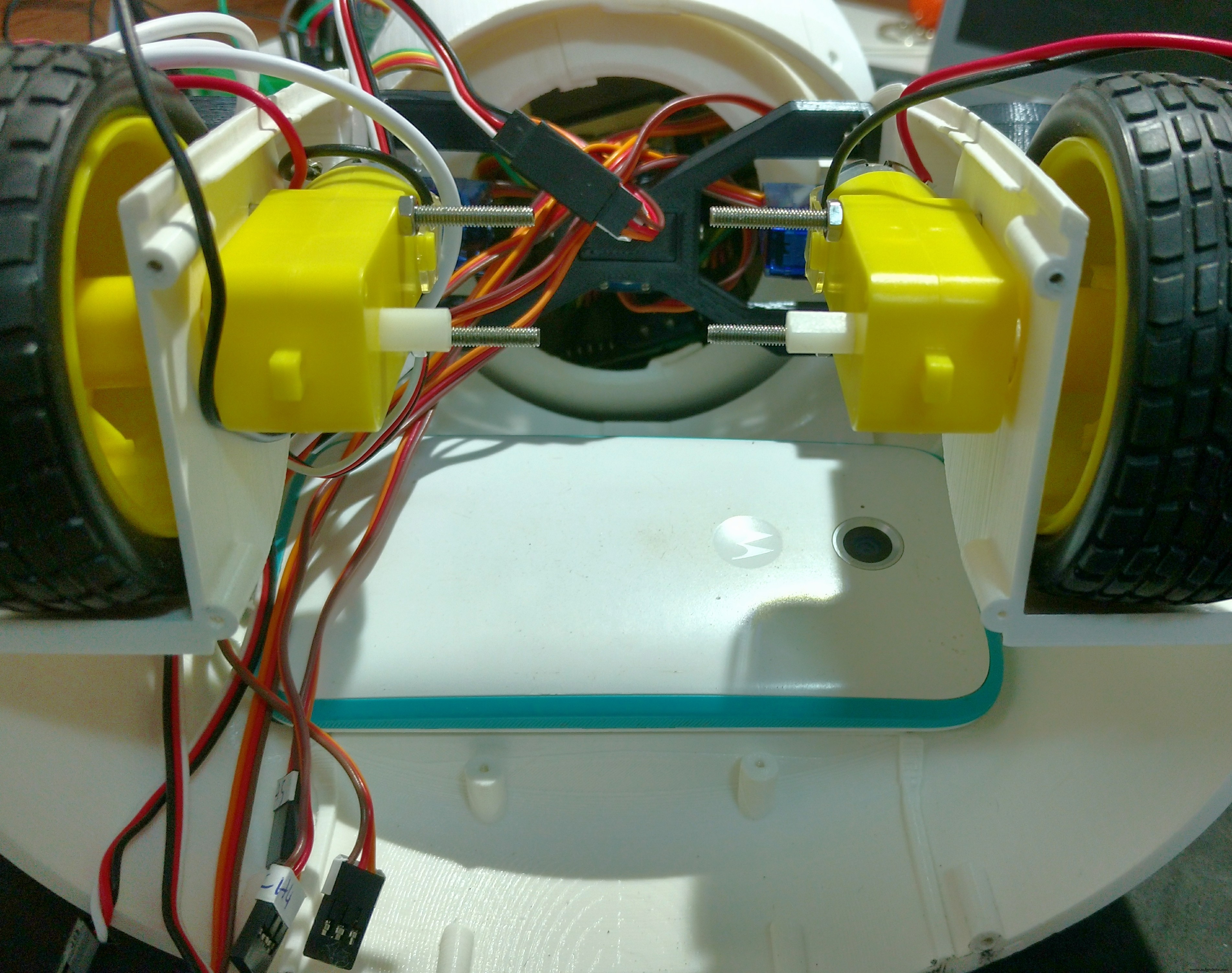
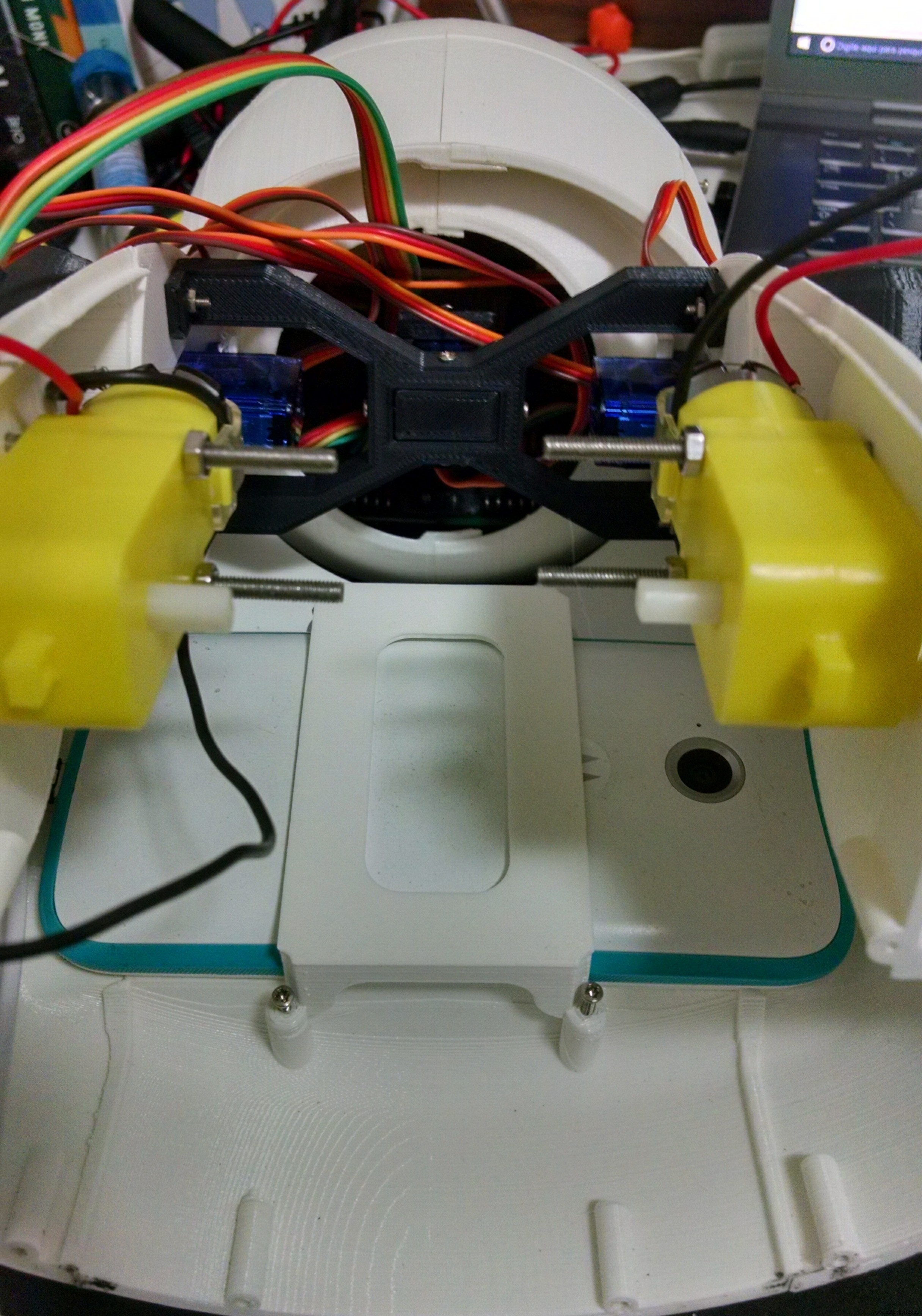
The phone holder part is used to hold the smartphone in the desired position. First the smart phone is positioned, then it's pressed against the body of the robot using the phone holder and four M2x6mm bolts.
It's importart to connect the USB cabe to the smartphone before tightening the bolts. Otherwise it will be hard to connect it later. Unfortunatly the space is very limited, so I had to cut part of the USB connector away... :/
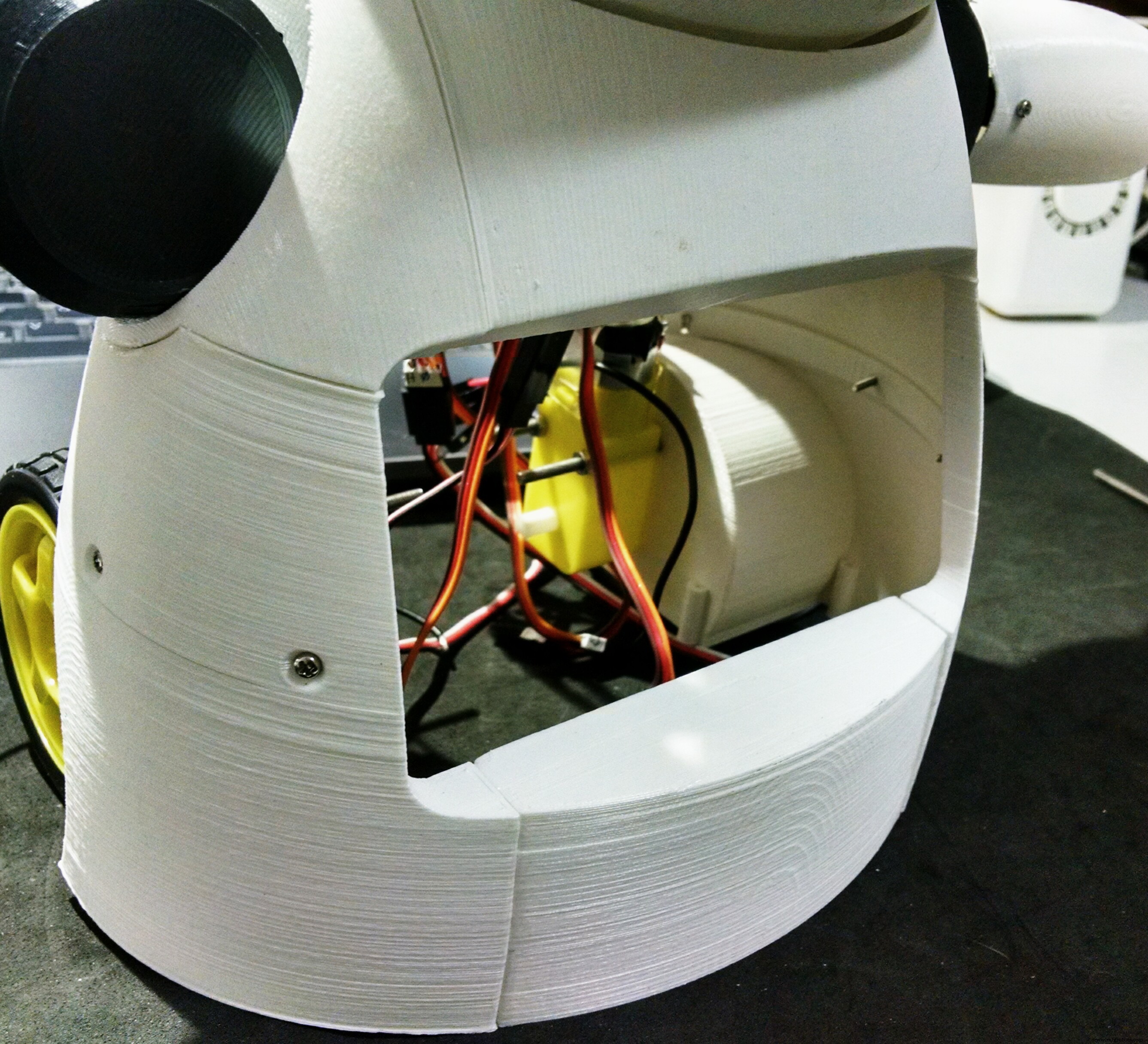
Step 12:Mounting the Base
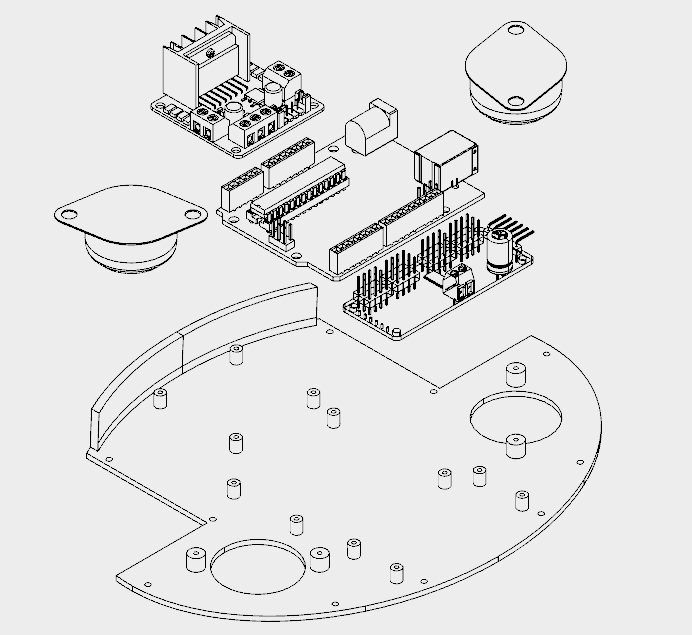
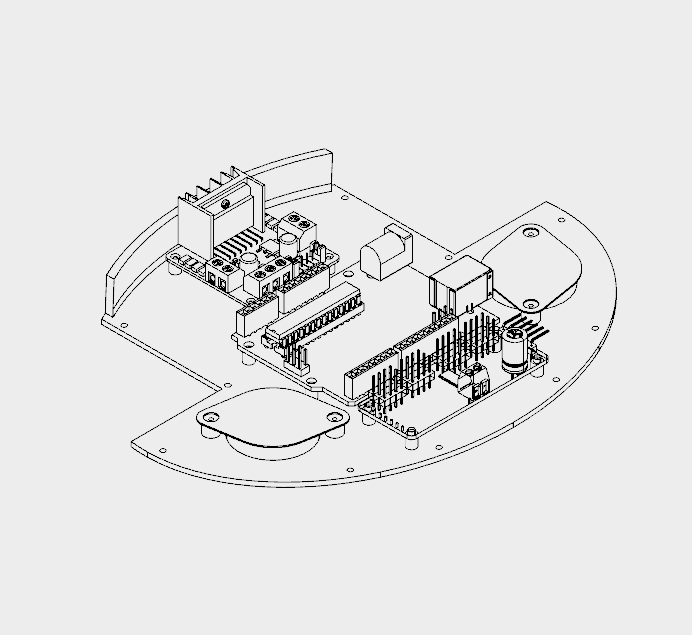
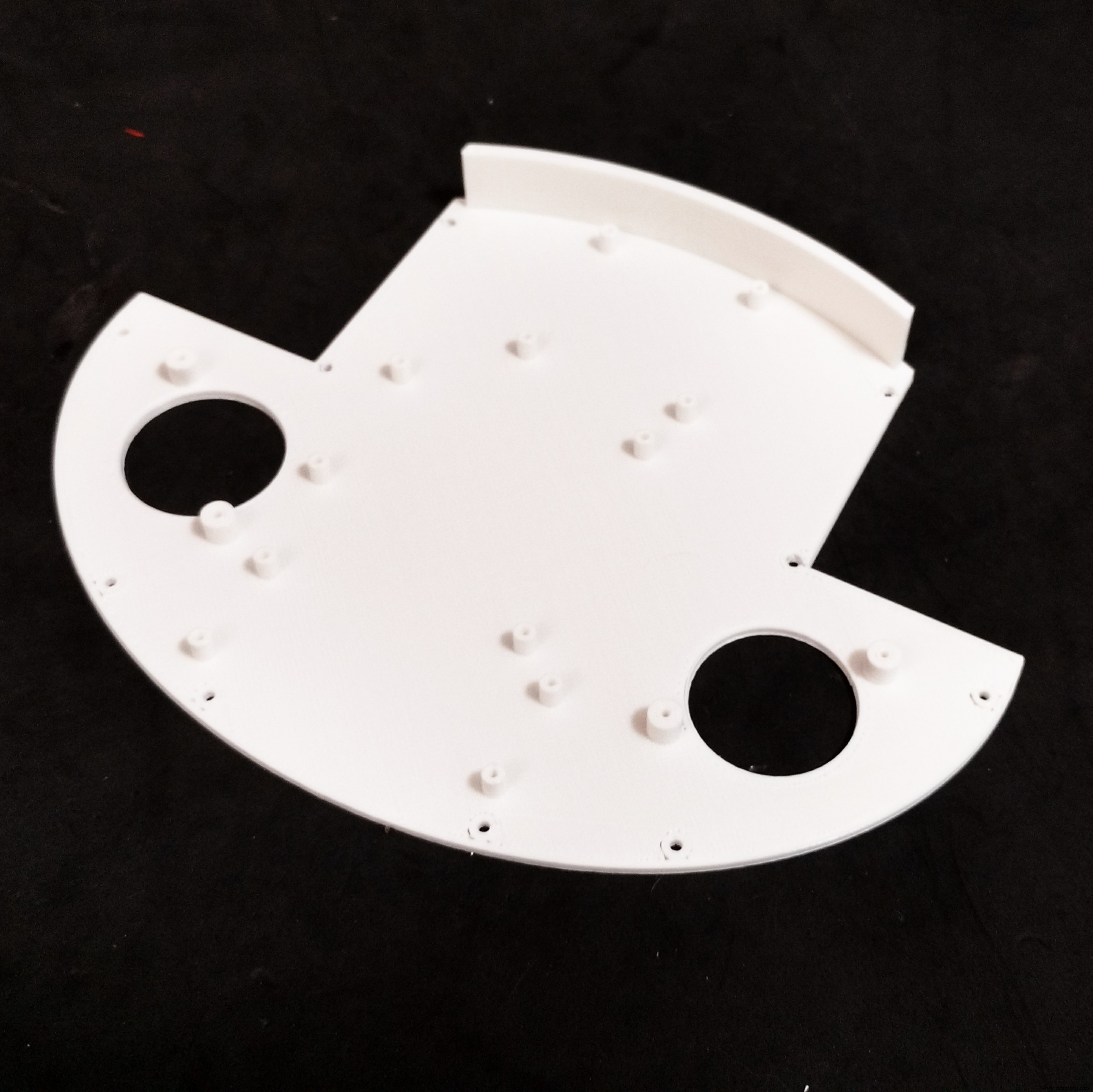
The base has only one 3D printed part. It took me around 4h to print that part.
It has several holes for the installation of other components, like the ball wheels, and circuit boards for instance. The following procedure was used for assembling the base:
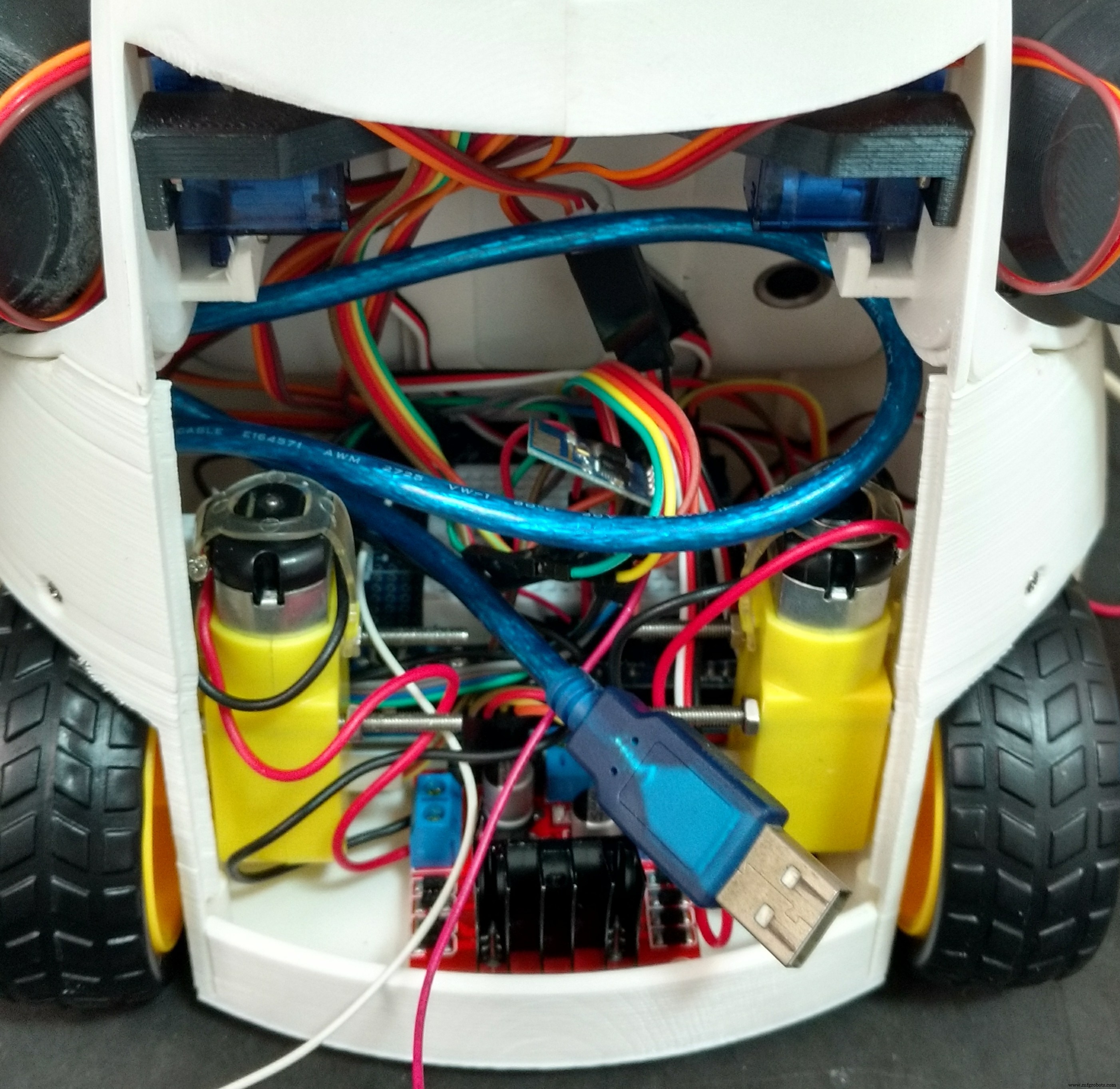
Step 13:Back and Power Pack
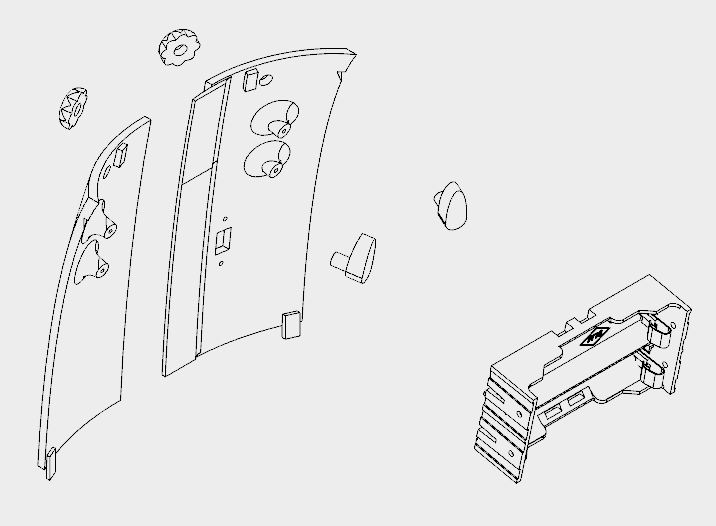


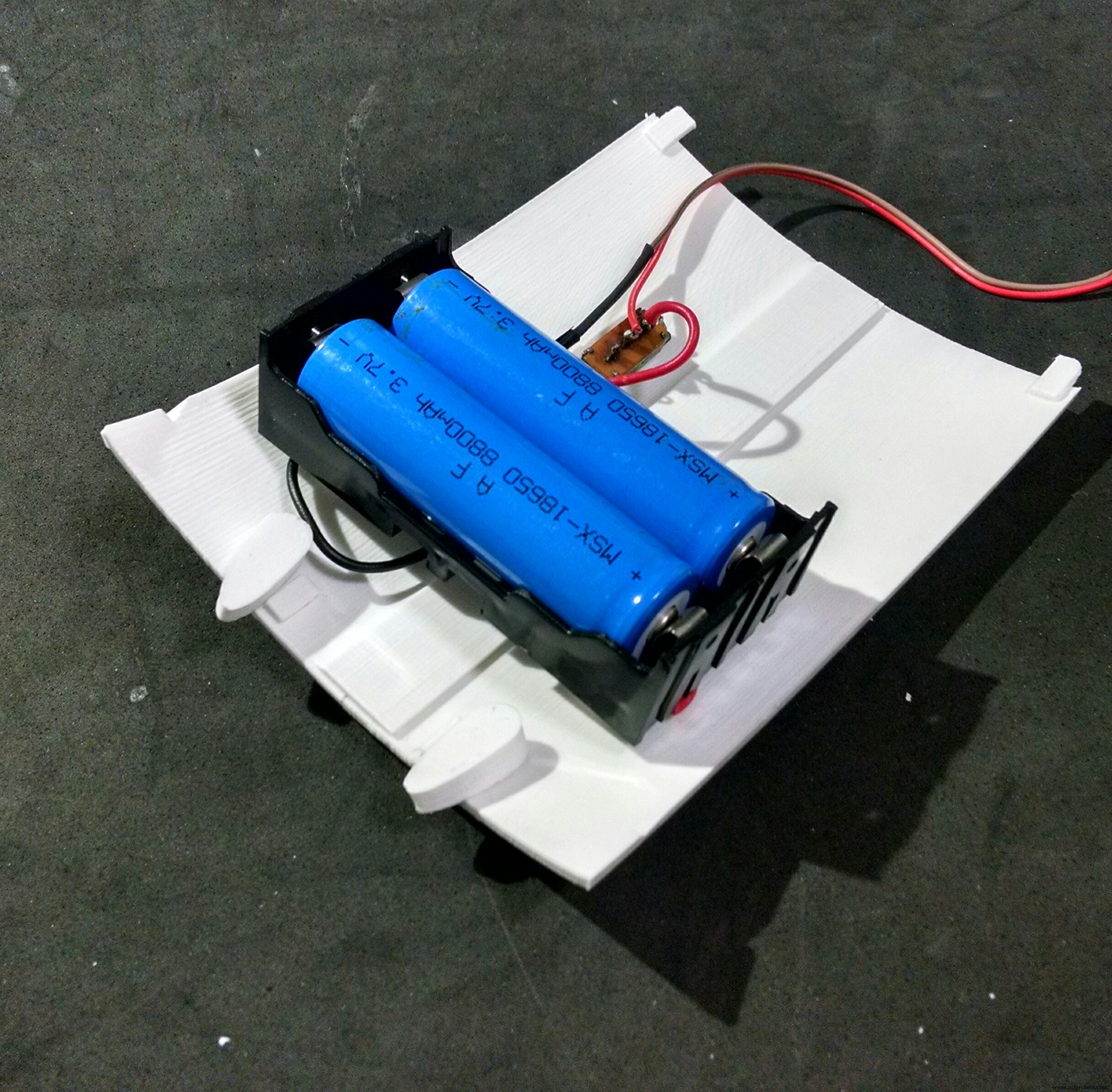
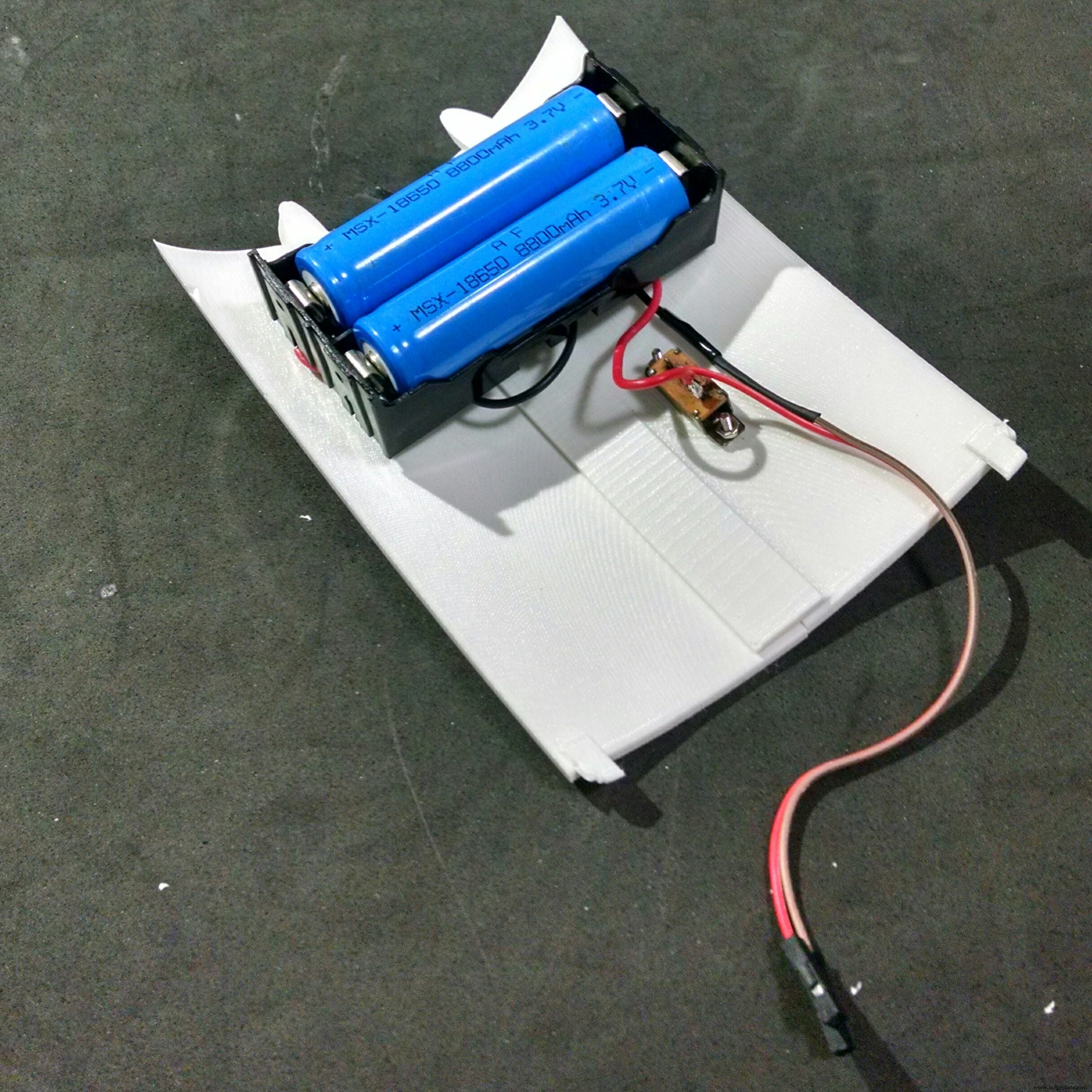

The back cover of the robot was designed so that one can easilly open it for accessing the circuits, recharging the batteries, or turning the smartphone on/off.
It's made of six 3d printed parts:
It took me around 5h30 for printing the parts. Right and left back parts were glued using superglue. Wait until the glue is completly dry, or the cover will break easilly.
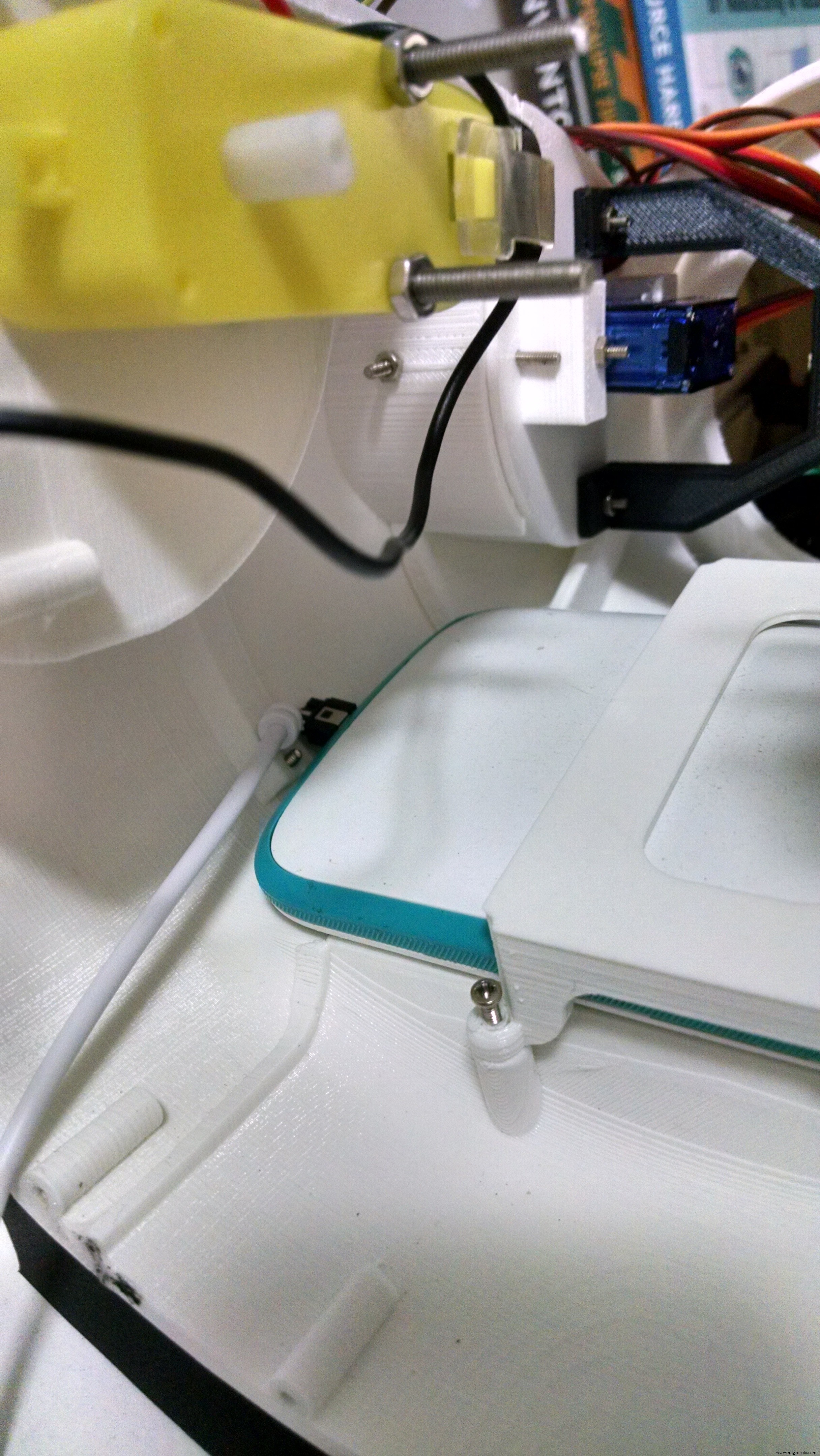
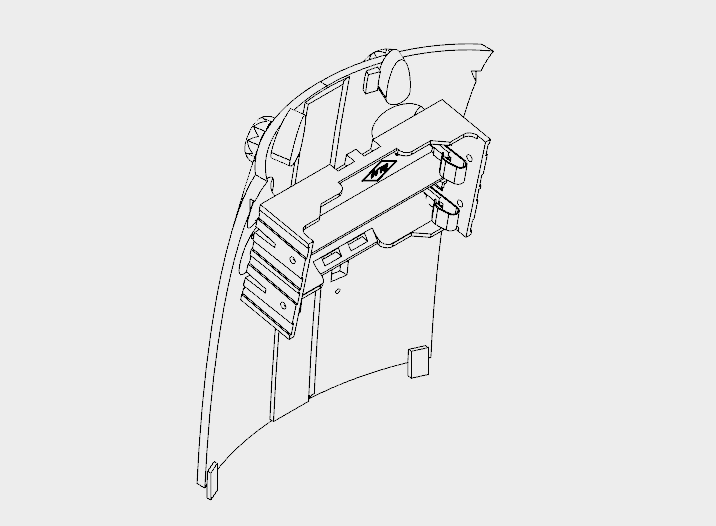
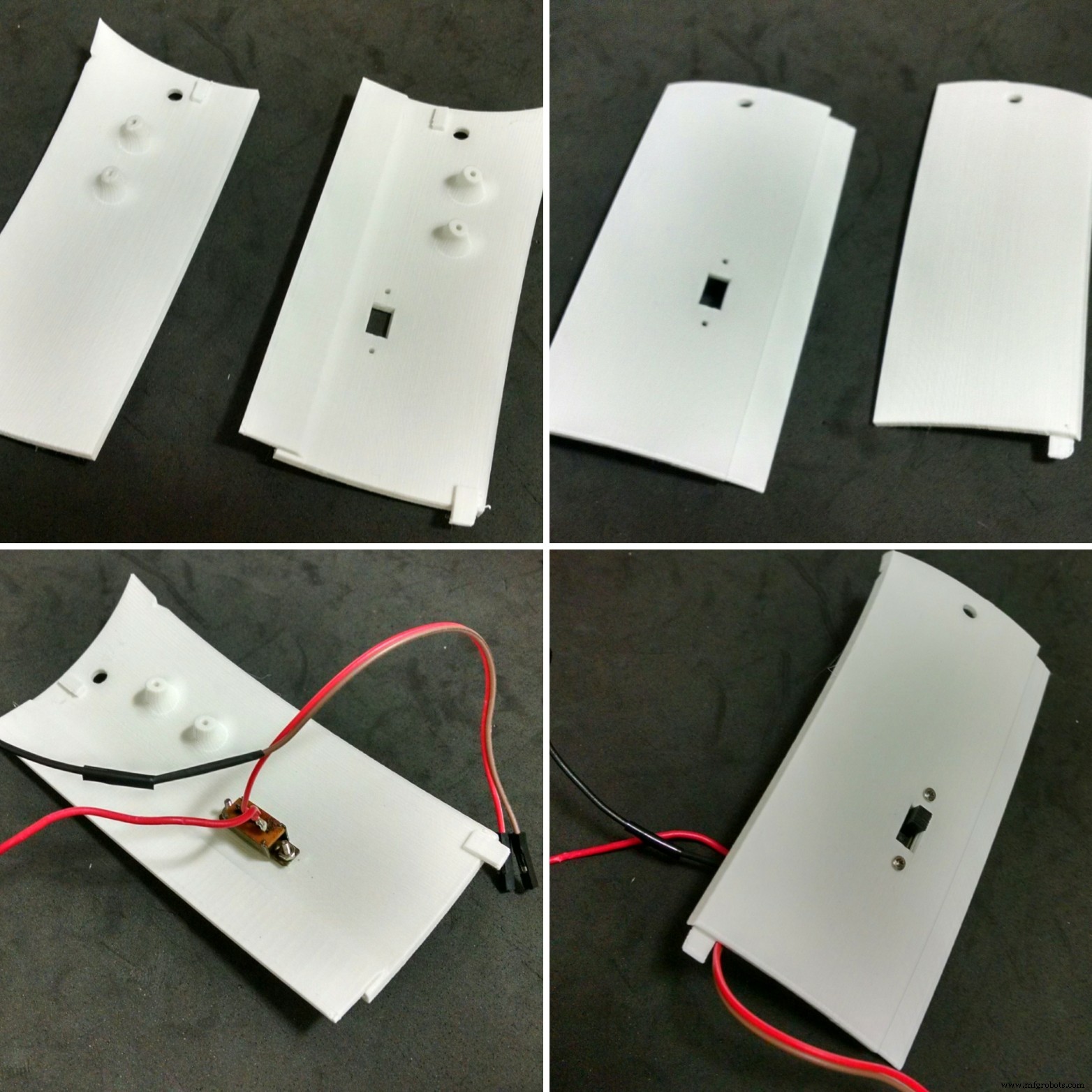
The power pack consists of two 18650 batteries and a battery holder. I had to solder some wires (between battery #1 negative pole and battery #2 positive pole). The negative pole of the power pack was connected to Arduinos GND (using some wires and jumpers). A on/off swich was installed between the positive pole and Arduino's Vin input.
The on/off switch was attached to back 3d printed parts using a M2x6mm bolt and M2x1.5mm nut. The battery holder was attached to the back using four M2x6mm bolts.
The cilindrical part of the locks had to be sanded with a sand paper for a better fitting. They pass through the holes on the cover. The knobs are connected and glued on the other side.
The cover fits to the back of the robot. The knobs can be turned for locking the lid, protecting the insides of the robot.
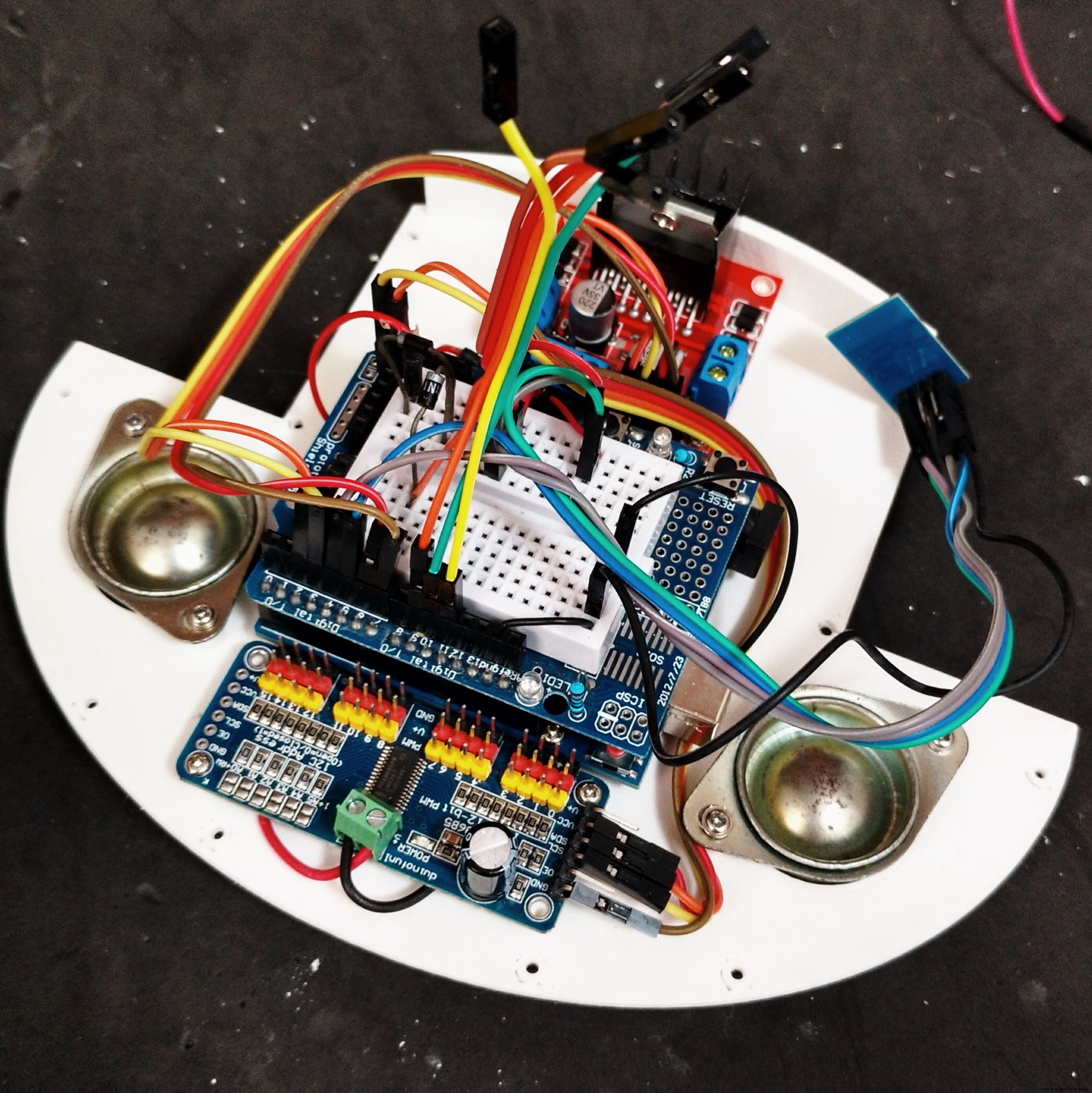
Step 14:Wiring Up the Circuits

The circuit was wired up according to the schematics.
Arduino:
ESP8266-01
L298N h-bridge
MAX7219 (first matrix)
MAX7219 (other matrixes)
16-channel servo controller
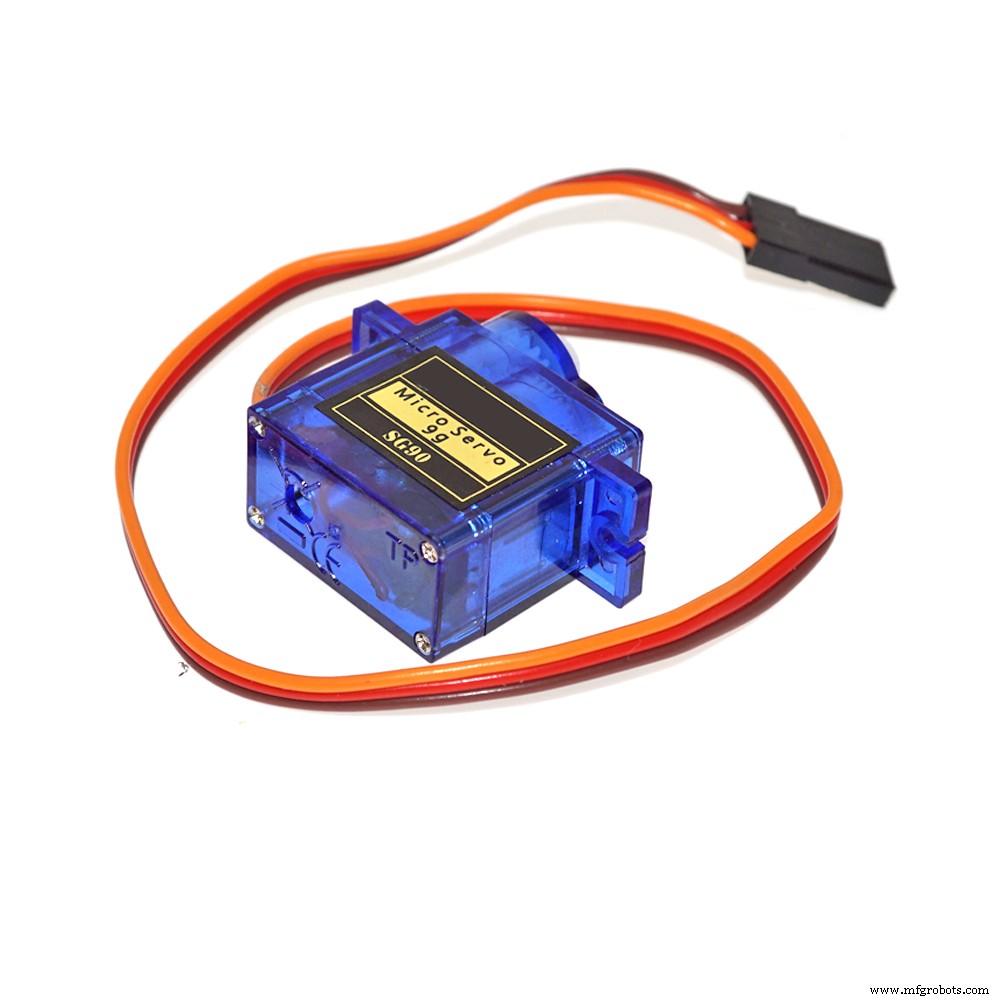
Some say the Sg90 servo can be powered between 3.0 and 6.0V, others between 4.0 and 7.2V. To avoid trouble I decided to put two diodes in series after the batteries. This way, the voltage for servos is 2*3.7 - 2*0.7 =6.0V. The same is applied to the DC motors.
Notice this is not the most efficient way, but it worked for me.
robot%2Bmk0%2B-%2Brev8_bb.pdf robot%2Bmk0%2B-%2Brev8_Esquem_C3_A1tico.pdf
Step 15:Arduino Code

Install the latest Arduino IDE. No library was needed for communication with ESP-8266 module or control of the DC motors.
I'll need to add the following libraries:
Arduino code is divided in 9 parts:
Download Arduino code. Replace the XXXXX by your wifi router SSID and YYYYY by router password on on '_80_Setup.ino'. Please check the baudrate of you ESP8266 and set it properly in the code ('_80_Setup.ino'). Connect the Arduino board to your computer USB port and upload the code.
RoboAlegria.rar
Step 16:Android Apps
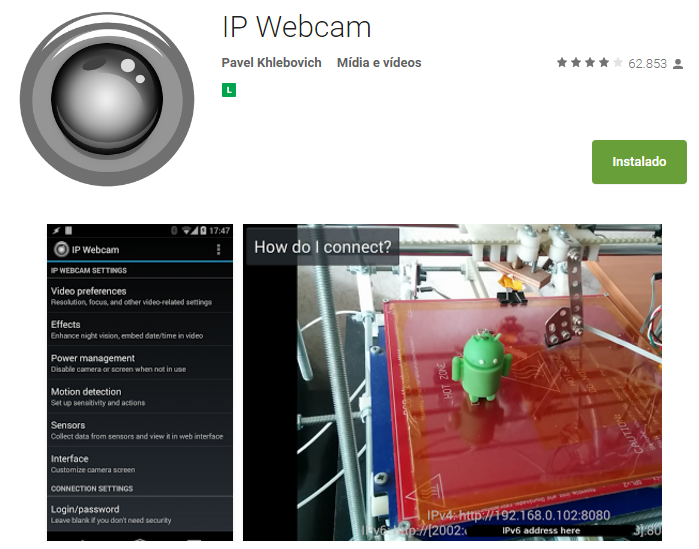
An Android smartphone was used to broadcast the video and audio from the robot to the control interface. You can find the app I used on Google Play store (https://play.google.com/store/apps/details?id=com.pas.webcam).
The screen of the smartphone may also be transmited to the control interface, so that the operator can see what's on the screen. You can also find the app I used to mirror the screnn on Google Play store (https://play.google.com/store/apps/details?id=com.ajungg.screenmirror).
An Android video game was also designed to interact with the robot. It's not yet very stable, so it isn't available for download.
Step 17:Control Interface


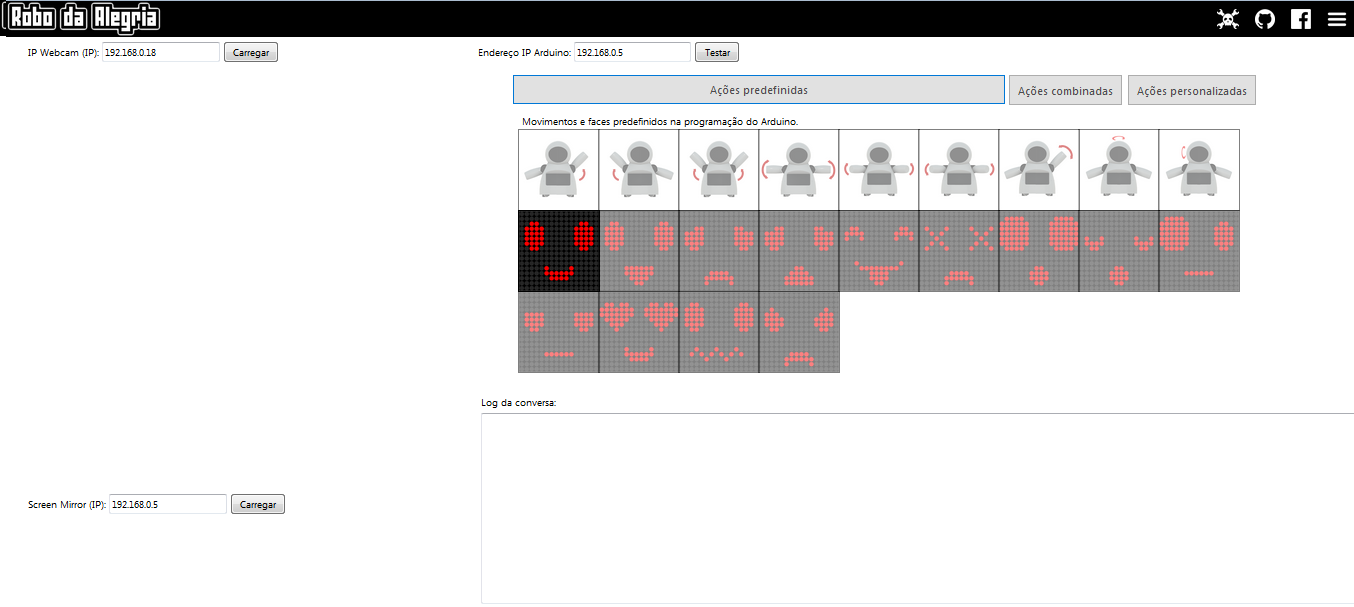
A html interface was designed for the control of the robot.Download interface.rar and extract all the files to a given folder. Then open it on Firefox. The interface is divided in two blocks. To the left there are displays for the camera and screen mirror. To the right there are controll buttons for the commands.
Textbox forms are used in that interface to enter IP address of the ESP8266 module ('Endereço IP Arduino:'), video/audio server from Android IP Webcam app ('IP Webcam (IP):') and Screen Mirror IP address ('Screen Mirror (IP):').
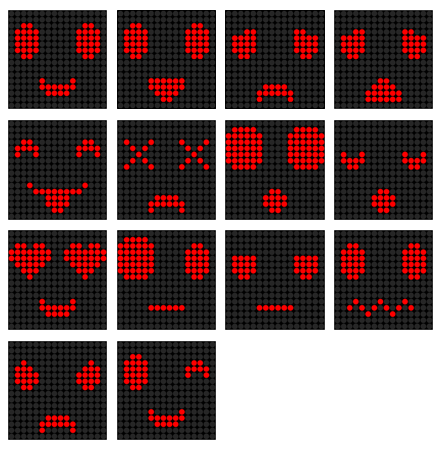
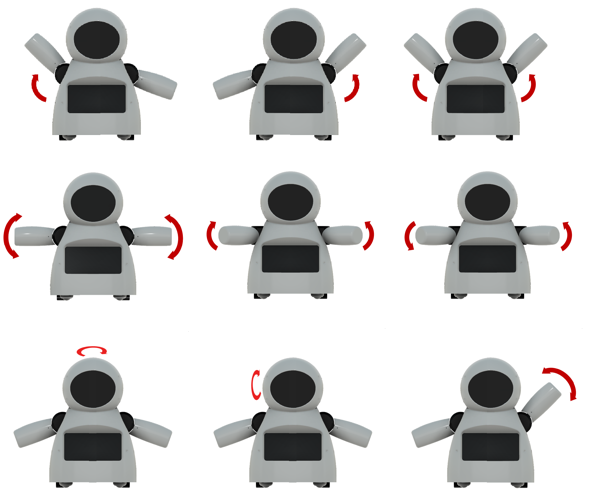
Under 'Ações predefinidas' tab user can select between 9 predefined body movements and 13 different faces. On 'Ações personalizadas' tab user can set a given angles for each of the 6 servos, and individually select between 9 eyes possibilities and 8 mouths variations. A javascript function runs whenever one of those buttons is clicked, and a message is sent for ESP8266's IP address.
Keyboard arrow keys are used for moving the robot forward or backward, and to rotate left or right.
When the interface is started, a warning is displayed, asking if the user wants to share the microphone. If this option is selected, sound intensity of the microphone will be used to send a preconfigured command to the robot. This command will trigger an animation, simulating speech movement on robot's face. A settings button on upper right corner might be used to set the sensitivity of the microphone.
This settings menu might also be used to configure the speed of arms and neck movements.
interface.rar
Step 18:Have Fun

Power it up and have fun!
If you like it, please share this tutorial with you friends! And don't forget to vote on Instructubles Contests! :D
http://www.instructables.com/id/Joy-Robot-Rob%C3%B4-Da-Alegria-Open-Source-3D-Printed-A/
Tidak ada pratinjau (hanya unduhan).
Tidak ada pratinjau (hanya unduhan).
Proses manufaktur
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Komponen dan persediaan Arduino UNO × 1 Arduino Nano R3 × 1 Modul Bluetooth HC-05 × 2 SparkFun Triple Axis Accelerometer dan Gyro Breakout - MPU-6050 × 1 Motor DC, 12 V × 2 roda karet × 1 Driver motor H-Bridge Ganda Instrumen Texas
Komponen dan persediaan Arduino UNO × 1 PHPoC WiFi Shield untuk Arduino × 1 Robot Lengan 6DOF × 1 Tentang proyek ini Jika Anda pemula, saya sarankan membaca tutorial berikut: Arduino - Motor Arduino - Motor Servo Arduino - Wifi 1. Demonstrasi 2.
Komponen dan persediaan Arduino UNO × 1 Adafruit L293D Motor Shield Ini adalah perangkat berbiaya rendah, dan mudah digunakan. Ini biasanya tersedia pelindung motor yang tidak memerlukan keterampilan sebelumnya. Itu juga dapat diprogram dengan mudah menggunakan perpustakaan Adafruit.