Apa yang Menghambat Integrasi Robot Industri?
Integrasi robot industri adalah proses yang sangat terspesialisasi, sangat kreatif dan licik, sementara orang-orang yang mempraktikkannya sering kali menghargai gagasan kecerdikan dan akal manusia itu sendiri. Dalam banyak hal, integrator robotika mewakili kumpulan arsitek solusi yang sangat terspesialisasi dan berkemampuan tinggi yang membantu produsen meningkatkan produktivitas mereka.
Sayangnya, ada beberapa hal yang menahan jangkauan dan cakupan integrasi robot industri kembali. Selain itu, para pengrajin yang teruji dan benar – integrator robotika yang kami percaya – yang paling menderita karenanya. Ini bukan hanya karena sulitnya menemukan orang dengan keterampilan yang tepat untuk integrasi robotika, tetapi juga karena pekerjaan itu sendiri dapat menuntut, membosankan, dan memiliki hasil terbatas dalam banyak skenario manufaktur.
Ada apa dengan robotika yang menahan mereka? Nah, untuk satu, pemrograman adalah proses yang menuntut sehingga upaya untuk membuatnya lebih mudah tidak memiliki dampak material yang seharusnya bagi banyak integrator. Bahkan ketika pemrograman lebih mudah, robot saat ini tidak dibuat untuk beradaptasi dengan berbagai suku cadang atau lingkungan yang tidak terstruktur, yang secara efektif menjauhkan mereka dari banyak pabrik. Penglihatan 3D, fusi sensor, dan berbagai teknologi menjanjikan untuk membuat robot lebih otonom, tetapi keterampilan dan perangkat lunak yang tepat belum ada untuk membuat segalanya cukup mudah dulu.
Untungnya, solusi yang tepat dapat membantu robot integrator mengatasi semua masalah ini sekaligus. Ketika mereka melakukannya, mereka akan membuka pintu ke berbagai industri, proses, dan peluang layanan yang sebelumnya tidak mungkin dilakukan.
Membuat Pemrograman Lebih Mudah Belum Cukup Mudah
Konsep robotika itu sendiri, relatif terhadap praktik lain dalam rekayasa modern, masih agak berbatasan dengan wilayah fiksi ilmiah. Bagaimana seseorang dapat mengotomatisasi proses dengan andal seratus, seribu, atau bahkan satu juta kali tanpa risiko kerusakan, penghentian, atau kerusakan besar?
Robot industri yang disediakan saat ini – baik dari FANUC, Kuka, ABB, Kawasaki, Universal Robots atau lebih banyak lagi penyedia baru dan khusus – biasanya memenuhi standar kinerja semacam ini, di mana tentu saja kendala proses dan persyaratan pemeliharaannya dihormati.
Kemajuan dalam material semakin membuat robot dari masing-masing vendor terkenal ini, lebih ringan, lebih gesit, lebih presisi melebihi apa yang pernah kita harapkan dari pekerja manusia. Ini telah memungkinkan berbagai sentakan, kemampuan pengemudi, dan lebih banyak lagi untuk dikembangkan oleh masing-masing.
Dalam semua kasus ini, pengembangan penting dan pilihan rekayasa dibuat untuk mencapai fitur dan tingkat kegunaan yang diperlukan. Meskipun proses ini melelahkan, proses ini juga menciptakan perbedaan dalam kemampuan, pemrograman, dan kesesuaian robot yang berbeda untuk operasi yang berbeda. Integrator robot ahli tahu cara mengelola model dan bekerja dalam skenario pilihan, tetapi ketika menyangkut kelangkaan keterampilan dan lingkungan untuk diterapkan – di mana mereka dapat tumbuh dan mendiversifikasi bisnis mereka – campuran persyaratan pemrograman robot ini tampaknya dapat bertahan di cara.
 Sistem Operasi Robot dapat – secara teoritis – membuat pengembangan aplikasi sesederhana robot adalah untuk komputer pribadi atau smartphone. Namun, pada kenyataannya, variasi perangkat keras multidimensi dari setiap robot hanya berarti bahwa robot paling tangguh saat ini tidak menggunakannya. Sumber:Wikipedia
Sistem Operasi Robot dapat – secara teoritis – membuat pengembangan aplikasi sesederhana robot adalah untuk komputer pribadi atau smartphone. Namun, pada kenyataannya, variasi perangkat keras multidimensi dari setiap robot hanya berarti bahwa robot paling tangguh saat ini tidak menggunakannya. Sumber:Wikipedia
Dalam pelanggaran ini, sebuah middleware pemersatu dapat dianggap oleh beberapa orang sebagai cara utama di mana setiap jenis dan fungsi robot yang berbeda dapat "diharmoniskan" untuk menyederhanakan perencanaan dan pemrograman operasi robot.
ROS (atau, cukup kreatif, "Sistem Operasi Robot") dirilis pada tahun 2007 untuk mencapai ini. ROS setidaknya menyediakan sistem yang berguna bagi akademisi dalam mengembangkan dan berbagi aplikasi robot. Sayangnya, ini pada akhirnya tidak menyelesaikan masalah yang perlu dipecahkan oleh integrator industri:kemampuan untuk secara mendasar melewati banyak keterbatasan yang menyertai perencanaan, pemrograman, dan pemrosesan di berbagai bagian dan kendala spasial. Semua ini dapat, sebaliknya, memungkinkan mereka untuk menggabungkan, mengintegrasikan, dan menjual lebih banyak robot ke dalam proses dan industri baru.
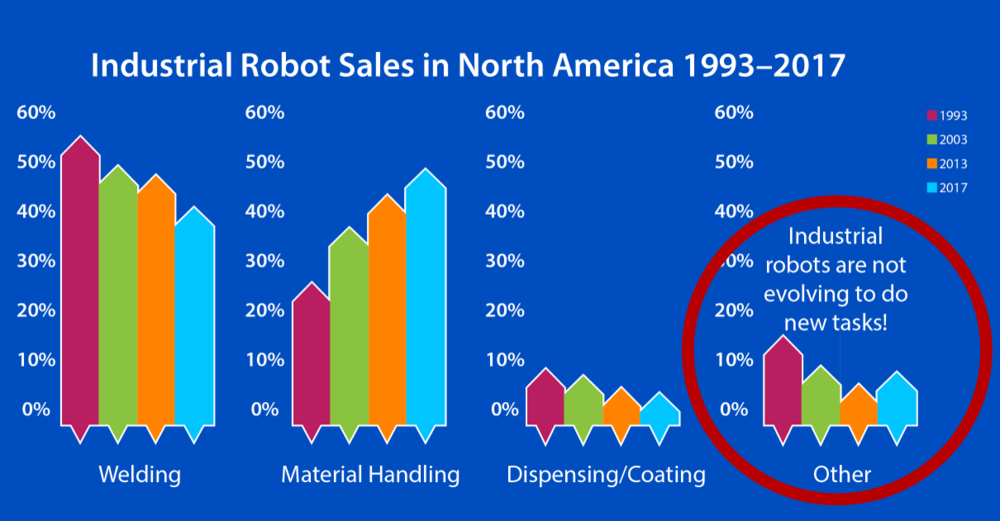 Sistem operasi memang memberdayakan manusia untuk "mengajarkan" mesin bagaimana melakukan sesuatu, tetapi itu tidak memberdayakan robot untuk "belajar" lebih baik. Pada akhirnya, kebutuhan akan perencanaan dan pemrograman menjadi begitu kuat sehingga integrasi robot telah dibatasi pada serangkaian tugas yang sama selama beberapa dekade – semuanya dalam industri yang sama. Sumber:ROS Industrial.
Sistem operasi memang memberdayakan manusia untuk "mengajarkan" mesin bagaimana melakukan sesuatu, tetapi itu tidak memberdayakan robot untuk "belajar" lebih baik. Pada akhirnya, kebutuhan akan perencanaan dan pemrograman menjadi begitu kuat sehingga integrasi robot telah dibatasi pada serangkaian tugas yang sama selama beberapa dekade – semuanya dalam industri yang sama. Sumber:ROS Industrial. Kebutuhan Part Run yang Terbatas atau Minimal
Pada akhirnya, middleware robot tidak secara mendasar mempercepat integrasi robot karena “loop tetap terbuka” – dengan setiap produk, proses, dan program yang dilakukan robot, setiap langkah harus diprogram, diuji dan divalidasi dalam serangkaian skenario yang 100% dapat diprediksi. . Ini pada akhirnya berarti bahwa, tidak peduli seberapa inkremental atau membantu skenario, itu akan membutuhkan waktu yang sama untuk mempersiapkan proses robot Anda yang paling penting. Bahkan jika Anda membuat pemrograman lebih mudah, sebuah proses yang membutuhkan pengulangan terus-menerus, itu tidak cukup mudah.
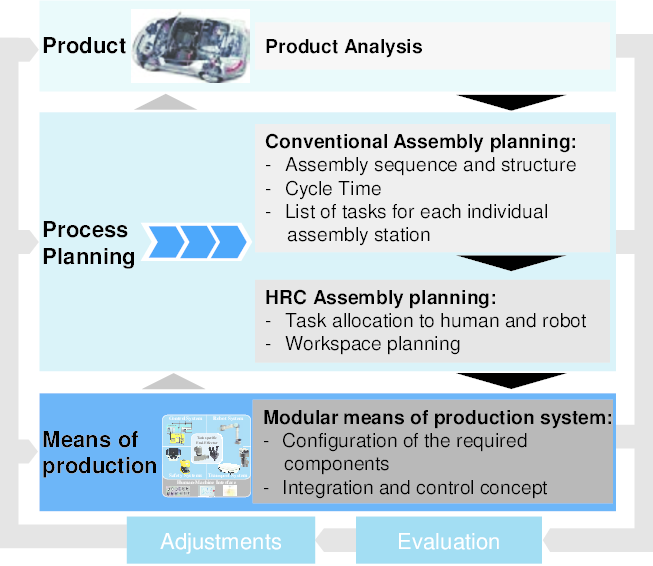 Di atas adalah diagram proses perencanaan tipikal dalam model Kolaborasi Robot Manusia. Proses umum ini pada akhirnya dibatasi oleh fakta bahwa itu harus didefinisikan untuk setiap bagian, yang berarti pekerjaan berlipat ganda (sampai tidak praktis) karena lebih banyak bagian memerlukan pemrosesan. Sumber:ResearchGate
Di atas adalah diagram proses perencanaan tipikal dalam model Kolaborasi Robot Manusia. Proses umum ini pada akhirnya dibatasi oleh fakta bahwa itu harus didefinisikan untuk setiap bagian, yang berarti pekerjaan berlipat ganda (sampai tidak praktis) karena lebih banyak bagian memerlukan pemrosesan. Sumber:ResearchGate
Sementara vendor robot industri tertentu mengiklankan bahasa dan metodologi pemrograman yang lebih mudah – termasuk peningkatan penggunaan HMI (Human Machine Interfaces) – setiap proses masih harus diprogram secara manual sampai tingkat tertentu. Program itu, seperti yang dihasilkan oleh manusia, harus divalidasi. Ini berarti hanya waktu terbatas yang pada akhirnya dapat dihemat dalam proses integrasi robotika.
Misalnya, ada tren yang berkembang di antara toko mesin dalam menggunakan robot dengan pemrograman tatap muka terbatas untuk proses yang dapat diulang. Proses ini akan memungkinkan pengoperasian beberapa ratus bagian logam, misalnya, untuk diotomatisasi dengan cepat dengan tingkat akurasi yang layak, tetapi pada akhirnya masih memerlukan sejumlah besar upaya manusia, pengawasan, dan pengerjaan ulang.
Meskipun ini dapat dianggap menyelesaikan sebagian besar "kerja keras", ini hanya menambah tingkat produktivitas yang terbatas ke toko tertentu, dan lebih jauh lagi, ini memberikan peluang terbatas bagi integrator robot untuk tumbuh dengan menjual layanan ke lingkungan pelanggan baru. Pada saat yang sama, itu tidak menyelesaikan masalah pergantian robot antar bagian atau di lingkungan yang tidak terstruktur, atau hanya yang tidak melibatkan jigging ekstensif.
Pada akhirnya, ini masih menjadi korban hukum “Menurunnya Utilitas Marginal”. Untuk produsen massal, utilitas marjinal robot relatif tinggi. Untuk toko mesin, sekarang lebih tinggi dari sebelumnya, tetapi masih terlalu rendah untuk menawarkan basis pelanggan yang andal untuk integrator robotika. Untuk produsen campuran tinggi – mereka yang memiliki ribuan SKU dan yang merupakan sebagian besar industri manufaktur – utilitas marjinal robot sangat rendah sehingga hanya sedikit, jika ada, yang menggunakan robotika secara teratur.
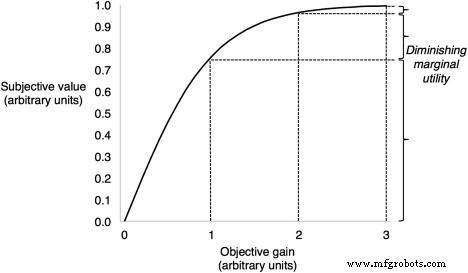 Sebagai pengganti robot yang membutuhkan pemrograman untuk setiap bagian yang mereka kerjakan, integrator perlu menemukan cara untuk mempersingkat atau menghilangkan proses pemrograman untuk membuat robot mereka dapat diterapkan ke berbagai macam suku cadang, yang pada akhirnya meningkatkan utilitas marjinal dari solusi mereka dan memungkinkan mereka untuk menjual lebih banyak. Sumber:ScienceDirect
Sebagai pengganti robot yang membutuhkan pemrograman untuk setiap bagian yang mereka kerjakan, integrator perlu menemukan cara untuk mempersingkat atau menghilangkan proses pemrograman untuk membuat robot mereka dapat diterapkan ke berbagai macam suku cadang, yang pada akhirnya meningkatkan utilitas marjinal dari solusi mereka dan memungkinkan mereka untuk menjual lebih banyak. Sumber:ScienceDirect
Dalam kasus ini, robot membutuhkan kemampuan untuk benar-benar merespons bagian dan lingkungan sedekat mungkin dengan cara "waktu nyata". Kemajuan baru dalam visi 3D memberikan peluang bagi integrator robotika untuk memberikan indra ini kepada robot dan, pada akhirnya, mengatasi tantangan pemrograman mereka sekali dan untuk selamanya – jika, tentu saja, robot dapat diberikan kemampuan untuk memprogram diri mereka sendiri.
Kemampuan Penginderaan dan Penglihatan Terbatas
Sekitar waktu yang sama dengan ROS dalam masa pertumbuhannya, cara baru untuk mendekati visi 3D sedang dikembangkan. Sensor Fusion – awalnya dikembangkan untuk lingkungan virtual 3D seperti yang dicapai dengan sistem Microsoft Xbox Kinect – memungkinkan rendering objek dan lingkungan yang relatif akurat dengan cara yang dapat dipahami oleh komputer.
Maju cepat beberapa tahun kemudian dan fusi sensor diintegrasikan ke dalam mobil self-driving dan robot seluler otonom sambil menemukan lebih banyak kegunaan dalam sistem realitas virtual yang melahirkannya. Konsep – bukan hanya sensor visual – berakar pada Sistem Pemosisian Global (GPS) sekaligus menemukan daya tarik relatif dalam segala hal mulai dari pemantauan HVAC hingga perangkat medis.
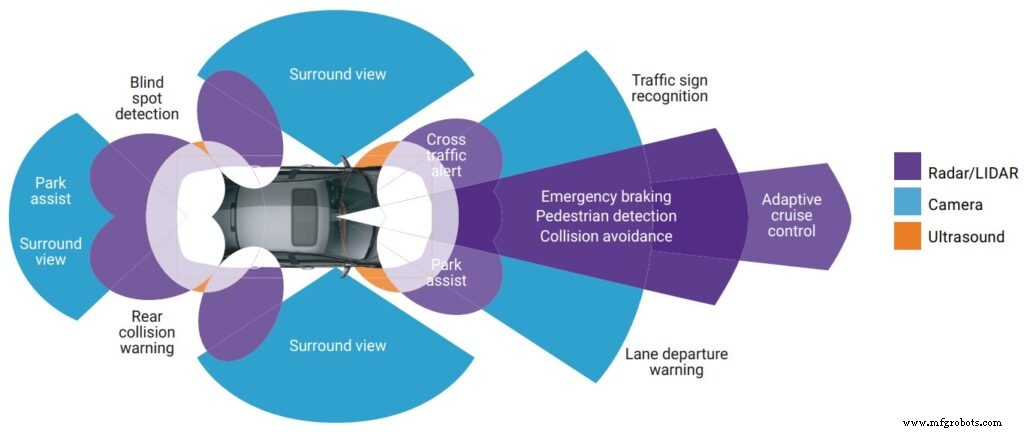 Sama seperti sensor fusion yang diterapkan dalam pengembangan mobil self-driving, industri integrator yang ingin robot bagian dan lingkungan-agnostik berhasil perlu menggunakan teknologi yang dapat menggabungkan tampilan dari beberapa sensor dan bahkan jenis sensor. Sumber:Edge AI Vision
Sama seperti sensor fusion yang diterapkan dalam pengembangan mobil self-driving, industri integrator yang ingin robot bagian dan lingkungan-agnostik berhasil perlu menggunakan teknologi yang dapat menggabungkan tampilan dari beberapa sensor dan bahkan jenis sensor. Sumber:Edge AI Vision
Namun, untuk pabrikan industri, fusi sensor baru saja dimulai sebagai aplikasi yang berguna. Sementara banyak yang mengendarai gelombang Industri 4.0/IoT dan mencoba mengintegrasikan sensor di lebih banyak tempat untuk mencapai pemantauan jarak jauh, kasus penggunaan pemrosesan tepi atau pemeliharaan prediktif, menggabungkan visi mesin dan robotika sebenarnya adalah cara terbaik yang dapat mereka lakukan untuk merespons robot mereka dalam proses industri. Dengan memberikan robot kemampuan untuk mengidentifikasi dan memproses objek di luar angkasa, mereka dapat membawa otonomi yang sama yang datang dengan teknologi mobil self-driving ke robot pabrik mereka.
Beberapa dari aplikasi ini ada saat ini, tetapi hanya untuk skenario yang sangat disempurnakan atau kit dev sensor out-of-the-box yang berasal dari robot industri besar dan produsen peralatan periferal. Ini menawarkan titik awal yang bagus untuk mengintegrasikan lebih banyak robot di lingkungan campuran tinggi, tetapi mereka terbatas terutama untuk memilih kasus penggunaan dan bukan proses nilai tambah, di mana kemacetan produksi paling umum. Pada akhirnya, hingga robot memiliki kapasitas untuk membuat program sendiri dari apa yang dilihatnya, robot hanya akan menawarkan peningkatan bertahap di lingkungan dengan campuran tinggi.
Memudahkan untuk Memasuki Industri Baru
Sebagai integrator robotika, Anda mungkin tidak memiliki waktu untuk menghasilkan solusi baru yang menggabungkan visi 3D, perpaduan sensor, atau jenis penawaran campuran tinggi yang baru dan lebih rumit. Banyak yang mungkin cukup senang dengan bisnis mereka di industri otomotif dan sejenisnya. Banyak lagi yang mungkin senang perlahan-lahan memasuki lebih banyak toko mesin dan operasi campuran tinggi di mana ukuran batch cukup besar untuk membenarkan solusi robotik.
Namun, bagi integrator yang mencari cara untuk menerapkan lebih banyak solusi robotika di industri yang belum melihatnya dan tidak tahu harus mulai dari mana, Teknologi Shape-to-Motion™ Omnirobotic mungkin menawarkan cara. Teknologi ini MELIHAT, MERENCANAKAN, dan MELAKSANAKAN proses semprotan industri dengan mengidentifikasi objek menurut bentuk – apa pun posisinya di ruang angkasa – menggunakan penglihatan 3D, kemudian menggunakan AI dan pengetahuan proses untuk menghasilkan gerakan robot unik untuk setiap bagian yang diproses. Kemudian dapat menjalankan proses dengan tingkat penyempurnaan, kualitas, dan peningkatan produktivitas yang tinggi dengan bekerja dengan penggerak gerak robot industri yang ada.
Teknologi ini pada akhirnya memungkinkan integrator robotika untuk menangani implementasi dalam skenario campuran tinggi, baik itu dirgantara, alat berat, furnitur utama, dan peralatan. Ini hanya beberapa – tetapi tidak semua – skenario di mana aplikasi pelapisan dapat memperoleh manfaat dari operasi robotik yang lebih ditingkatkan dan presisi, namun memiliki terlalu banyak jenis suku cadang untuk membenarkan waktu pemrograman yang diperlukan dari solusi pemrograman manual mana pun saat ini.
Omnirobotic menyediakan Teknologi Pemrograman Mandiri untuk Robot yang memungkinkan mereka melihat, merencanakan, dan menjalankan proses penyemprotan dan penyelesaian industri yang penting. Tim Omnirobotic menggabungkan pengalaman puluhan tahun dengan kemampuan AI baru untuk menyediakan ini melalui sesuatu yang disebut Teknologi Shape-to-Motion™, yang menghasilkan gerakan robot unik secara real-time untuk setiap bagian dan kebutuhan spesifik. Lihat pembayaran seperti apa yang bisa Anda dapatkan dari sini .


